
Vehicle Variable Estimation in Diagnostic Context
Elie Accari
1
, Denis Hamad
1
and Chaiban Nasr
2
1
ULCO, LASL, B.P. 699, 50 rue F. Buisson, 62228 Calais CEDEX - France
2
Lebanese University, Engineering Faculty I, Tripoli - Lebanon
Abstract. Safety in vehicles has many aspects and is implemented in different
ways by manufacturers. With more safety systems to come, the vehicle will
certainly start to have an operating system to manage the whole. Neural
networks have an adaptative behavior that can be trained to meet new
conditions and have a certain inherent degree of robustness when used as
variable estimators. In this paper, we present a simplified model of the vehicle
suitable to create neural network architectures that estimate the forces applied to
the wheel as well as the vehicle body slip angle and yaw rate. For this purpose,
we use the veDyna simulator which substitutes safely and economically real test
vehicles. Typical extraneous and erroneous data are then presented to test the
robustness of the network in order to judge the applicability of this approach
from ideal, exact calculation conditions to real life situations.
1 Introduction
Safety is a topic that is being implemented more and more at many levels in vehicles
thanks to advances in computational technologies. The key difference between these
solutions is where they put the decision making, and along with it, the responsibility.
An attempt in this regard is started with the IEEE P1616 “Motor Vehicle Event Data
Recorders” draft standard. The first approach using systems such as Anti-lock
Breaking System (ABS), Vehicle Stability Assist (VSA), Traction Control System
(TCS) and Electronic Stability Program (ESP) [1], implement the control in the
vehicle, leaving the driver passive in their function, except for his actions that put the
vehicle in a condition or situation that activated these systems. The second approach
[2] targets the behavior of the driver with respect to speed, tailgating and wearing the
seatbelts. The infringement of a normal condition is reported by an audio-visual alarm
of an increasing intensity as the vehicle speed exceeds the limit in the local area, the
distance to the vehicle ahead is reduced and the seat belts is still off while the speed
increases. The application of Neural Networks in a vehicle context is not new.
Previous work has shown that the non linearity of a semi-active suspension can be
overcome by the use of neural networks as control elements [3]. Also, the neural
networks are more closely applied to parameter estimation through their use in
measuring acceleration [4], and they are also used in a fault diagnostic context [5].
In this work, we propose to estimate the state of the vehicle based on a typical
physical model, then we use MLP neural networks structures with one hidden layer to
elaborate estimators of directly measurable or calculated variables. The justification
Accari E., Hamad D. and Nasr C. (2006).
Vehicle Variable Estimation in Diagnostic Context.
In Proceedings of the 2nd International Workshop on Artificial Neural Networks and Intelligent Information Processing, pages 35-44
DOI: 10.5220/0001199800350044
Copyright
c
SciTePress

of this approach is that with the proper training, this system can curve fit any real
function [6], [7]. We then study the response of the estimation networks to data
unseen before in the training. Robustness is probed by changing the driver and adding
errors to the inputs.
2 Physical Model of the Vehicle
2.1 Vertical Reaction Force
Each wheel is subject to a vertical reaction force which is the resultant of the sum of
all the small forces applied over the surfaces of contact between the tread and the
road. This force is not necessarily applied at the centre of this surface and various
wheel models try to locate and model it [8]. However, its magnitude can be
determined by decoupling the front and rear axels and applying the laws of static and
equilibrium of forces as shown on Fig. 1.
Fig. 1. Static Model of the Vehicle.
This way we can estimate the force on the rear left wheel F
ZRL
to be:
gb
ah
a
l
h
g
l
l
ma
l
h
g
l
l
mF
R
YCoG
X
CoG
F
X
CoG
F
ZRL
`
2
1
⎟
⎠
⎞
⎜
⎝
⎛
+−
⎟
⎠
⎞
⎜
⎝
⎛
+=
(1)
where m is the mass of the vehicle; l
F
, and l are the front and total lengths of the
vehicle measured from the centre of gravity whose height is given by h
CoG
; a
X
, a
Y
and
g are the longitudinal, lateral and gravity accelerations; b
R
is the length of the rear
axle; RL refers to the Rear-Left wheel. In this equation, only a
X
and a
Y
are variables
while the remaining elements are parameters. The height of the centre of gravity is
constant for a given load only when the vehicle is standing still or moving at a
constant velocity. However, it varies with the acceleration and thereby the
accelerations remain the only variables needed for the estimation of this force.
2.2 Lateral Force
Due to the fact that the wheels on one side of the vehicle are not parallel to the other,
and there is a small axis toe-in (b
R
≠ b
F
), a remnant lateral force F
Y
is always present
and it is equal and opposite for wheels on the same axel in straight course. This
36

embedded value will be trained into a neural network. The estimation will be limited
to the cases when the vehicle is actually making a turn, represented by a steering
angle larger than a given minimum. The horizontal and lateral forces are linked to the
vertical reaction by the friction coefficient of adhesion:
z
x
x
F
F
=
μ
and
z
y
y
F
F
=
μ
(2)
where F
X
, F
Y
and F
Z
are the longitudinal, lateral and vertical forces applied to the
wheel. Note that this ratio is constant only for the low values of the forces.
2.3 Wheel Slip
The relationship between wheel slip and the friction coefficient is the subject of
various studies [9], [10]. Though the definition is the same in all references as being
the difference between a wheel's rotational and translation speeds, as given by:
v
r
v
rv
vdt
dtrvdt
s
ω
ω
ω
−=
−
=
−
= 1
(3)
where s is the slip, v is the vehicle’s speed, r is the wheel radius,
ω
is the wheel’s
angular velocity and dt is an interval of time.
The forced rotation of the wheel generates the longitudinal force shown in Fig. 2.
Fig. 2. Wheel’s static radius and applied forces.
r
stat
is the static wheel radius, defined as the distance between the centre of the wheel
and the road for a given load at stand still. We note however that because each wheel
is subject to a different vertical reaction force, they are compressed differently on the
front and rear axles and therefore their radii are not the same. Any variation in this
parameter implies a variation in the wheel’s speed and we only consider the rotational
speed as variable and the remaining elements as either parameters or implicit.
We conclude that the vehicle’s speed, the wheel's rotational speed and the vertical
force have the major influence in determining wheel slip.
37
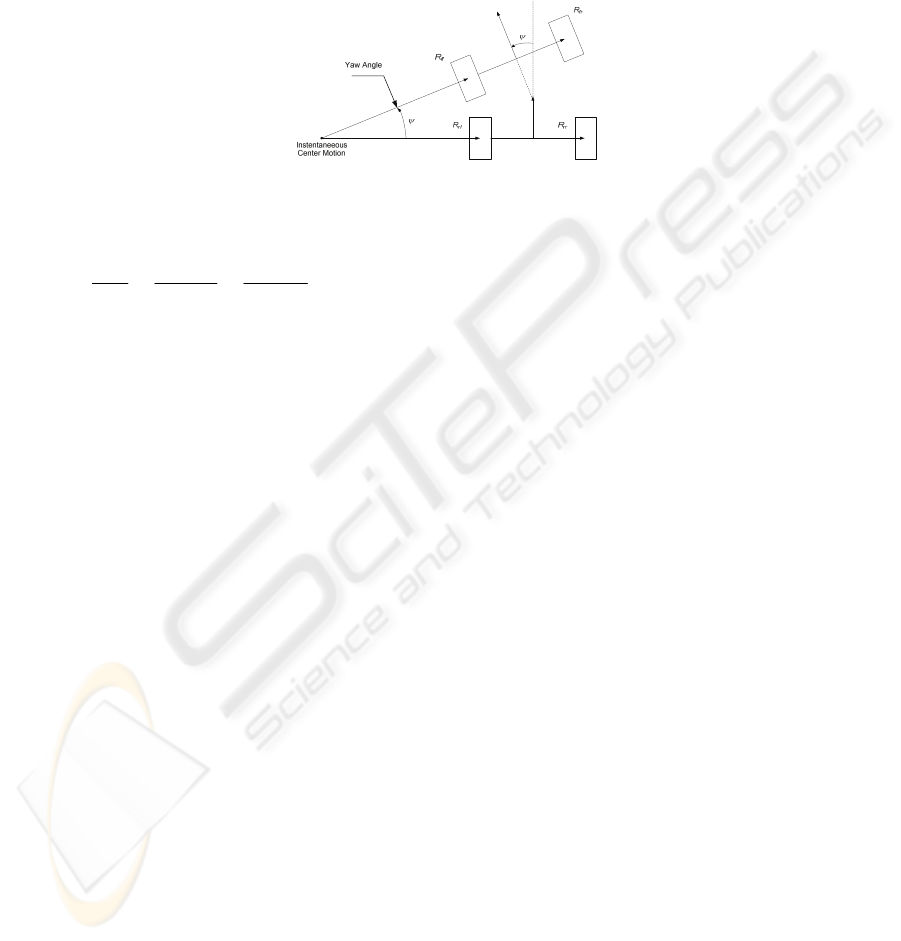
2.4 Yaw Rate
We attribute to every wheel R
ij
a rotational speed
ω
ij
. As the vehicle makes a turn
about a central point, the angular movement around the vertical axis becomes
proportional to the wheels’ speeds, in either their rotational or linear form. Thus the
yaw angle
ψ
is linked to the wheel rotation speed
ω
ij
and to the apparent turn radius of
curvature conform indicated on Fig. 3.
Fig. 3. Yaw movement in curve motion.
By observing this motion over time, we can establish the following relations:
rr
rrstat
rl
rlstat
R
r
R
r
dt
d
ω
ω
ψ
==
(4)
where
ψ
is the angular yaw, r
stat
is the wheel’s static radius,
ω
rr
is the rotational speed
of the rear right wheel,
ω
rl
is the rotational speed of the rear left wheel, R
rr
is the
radius of curvature of the path followed by the rear right wheel.
If need be, the yaw movement of the driveline can be upgraded to the vehicle’s
body where another component, an angle usually designated β measuring the side slip
of this body as it tends to resist, or follow with a backlash, the velocity vector of the
driveline. β is considered to be included in the yaw motion and without going through
its relationship with the suspension system it can be estimated from the physical
factors that cause it in the first place.
3 Simulated Driving Maneuvers
The German company TESIS Dynaware presents the vehicle simulation software
veDyna [11]. This simulator takes the most recent mathematical models to calculate
the behavior of the car step by step until the maneuver is over, thus providing accurate
information on what may happen on the road under the given circumstances. The
model we used is that of a BMW 325i model 1988, and we did not modify it in order
to remain as close as possible to a real life situation. The veDyna simulation software
uses about 1500 variables in order to render its virtual simulations close to real life
conditions. With its Matlab interface and open connectivity though the declared
functions, it offers unmatched flexibility allowing it to reproduce at a cheap cost a
large variety of normal and abnormal driving situations. This way, it spares fastidious
and dangerous maneuvers on real test vehicles. Typical maneuvers of slalom and
acceleration-deceleration speed profiles were used to generate an extensive training
38

data set for neural network estimators. The performance of these networks is tested on
a double lane change maneuver. In the following, we give a brief description of the
training maneuvers, with emphasis on the cease acceleration maneuver used in testing
the robustness against changing the driver.
3.1 Generation of the Training Database
In order to create the training and testing databases, we used the veDyna and Matlab
software to generate several road profiles and maneuvers:
• A slalom profile is generated such that the course is sinusoidal while the driver
maintains a constant velocity.
• A straight velocity profile is designed to solicit the vehicle in longitudinal
accelerations and decelerations.
The data generated by the vehicle performing these maneuvers are gathered to form
the training. In all, 56 variables were sampled at a period of 1ms, some of which have
taken part in the training processes while others were used to draw and recreate the
path followed by the vehicle on track. Thus we generated 5500 input vectors of 56
components each for the velocity profile maneuver and 4000 input vectors for the
slalom maneuver. However, we did not use these sets in complete because we can
eliminate the parts that correspond to a monotone or redundant situation on the road
in order to accelerate the training process and reduce the amount of resources required
by this task.
3.2 Generation of the Validation Database
The databases used to test the performance of the neural networks are generated using
the Double Lane Change and Cease of Acceleration maneuvers described below.
Theses maneuvers were chosen because they do not figure explicitly in the training
database.
3.2.1 Description of the Double Lane Change Maneuver
The double lane change profile is an overtaking maneuver in which the driver changes lanes
twice in order to overpass a virtual vehicle ahead. It is made of 2300 data samples.
3.2.2 Description of the Cease Maneuver
The Cease maneuver is mainly about releasing the acceleration pedal abruptly while
in the middle of a curve. The driver starts at t = 0 on a straight course, and accelerates
until the vehicle reaches the speed v_dep at time t_dep. This speed is maintained over
a time t_hold until the driver goes on a constant acceleration phase for a period of
t_acc. At this point, the vehicle is in the middle of a curve and the driver suddenly
releases the acceleration pedal letting the vehicle roll for a time t_free before bringing
it to a stop in an interval of time t_fin. The numerical value for the variables involved
is given here for reference:
t_dep=10s t_hold=5s t_acc=5
39

t_free=5s t_fin=6s v_dep=72Km/h
The total maneuver time is 1s more than the sum of the parts because, as per the
simulator’s documentation the system must first start and remain idle until all
calculation transients have elapsed [11]. A total of 3200 samples were generated for
this maneuver. The driver model used to perform this maneuver is based on the
fundamental primitives directly available from the simulator, mainly: (i) CRUISE and
ACCPEDAL for longitudinal control and (ii) STRAIGHT, LINTABLE and FIXED
for lateral control. In-depth information about these functions can be found in the
referenced documentation. The main difference between these directives and the
“advanced driver” model available in veDyna is that while the former behaves simply
as it is told, the latter uses PID control to maintain the centre of gravity of the vehicle
aligned with the centre line of the road path, while observing given temporal or
special constraints.
4 Experimental Results
In this paragraph we use the Multi-Layer Perceptron architectures with one hidden
layer to estimate the vertical reaction force F
Z
, lateral force F
Y
, wheel slip and the
vehicle yaw. For our application, we apply the BFGS training algorithm described in
[12]. The results are compared to the values generated by the simulator, hence
substituting safely and more economically a real vehicle. Note that it is a good
strategy to test the ability of the network to estimate the desired function by hiding
known, simulator generated, data in the training phase and leave it for guessing at a
later stage. One more reason for doing so is that the data in our test sets are within the
extreme limits already fed to the network through the training sets; for example, the
turns in slalom are harder and the speed and breaking in the velocity profile are more
abrupt than the ones in the double lane change, for example. Finally, besides straight
driving, overtaking or double lane changes is one of the most performed maneuvers
on the road.
The cease acceleration maneuver is also very common and hence it is used in
testing the robustness of the neural networks against a change in the driver model.
4.1 Test of Vertical Reaction Force F
Z
Each wheel has a dedicated neural network made of 2 inputs a
X
and a
Y
, 19 neurons in
the hidden layer and one output.
The results comparing the output of this network to the output of the simulation
software in the case of the double lane change maneuver for the rear left wheel are
given in Fig. 4. In this case, the estimator is able to calculate Fz accurately when the
vehicle body is not strongly sollicitated, otherwise it will commit a maximum error of
10%. Note that all simulation figures, and in this case Fig. 4, are a snap shot of
continuous motion over the whole simulation time, which can sometimes go around
one minute of driving and contains too much of non critical information to show on a
figure. On the other hand, we are observing 56 variables at veDyna’s default
calculation step of 1ms, so the software anticipated that this large size of 10 bytes
40

IEEE Real variables is not entirely necessary to store in a log file, so we use its
default rate of 1 in every 10 samples for observing the variables. Hence, the 0 in x-
axis of the figures corresponds to the time t0 as of which the data starts to be
interesting for us and the sampling time is to be multiplied by 10 to read the real
simulation time; thus 200 corresponds to 2000ms after t0.
4.2 Test of the Lateral Force F
Y
The inputs are the lateral acceleration a
Y
and the steering angle lrw, with 40 neurons
in the hidden layer and one linear output. The results of the estimation of this force on
the double lane change maneuver are shown in Fig. 5, with an average error of 15.8%.
4.3 Test of Wheel Slip “s”
Each wheel has a dedicated neural network of its own, having 3 inputs and 53 neurons
in the hidden layer. The longitudinal component of the speed of the vehicle's centre of
gravity is a common input to all four networks; the remaining two inputs are the
specific wheel's rotational speed and the applied vertical force F
Z
≡F
ZXY
, with
XY=RR, RL, FL or FR. The results of the simulation on the double lane change
profile are shown in Fig 6. We conclude that the wheel slip can indeed be calculated
with a ±6% tolerance from the vehicle's overall speed and the wheel's rotation speed
under given load conditions F
ZXY
.
It can be inferred from the Fig. 6 that the maximum slip is well below 10% and we
are in the linear edge of the slip curves, so a less complicated approach is feasible.
Yet it should be noted that the value of sl is only small because veDyna’s “advanced
driver” is programmed to keep the vehicle near its optimal functional point, where it
has the most traction (and hence stability) on the road and the efficiency of the engine
as seen from the wheels is maximal. A human driver will not always be able to do so
and will need to be followed throughout the entire slip margin.
4.4 Test of Yaw Rate “dψ/dt”
The inputs to the neural network are three of the four wheels' rotational speed, since
the fourth wheel is forcibly dragged by these three and the vehicle body since it is not
deformable. However, we noted that the network is better run if it is given the
difference between these variables, two by two, instead of giving them in raw format
and let the network figure it out. This idea was used because in order to obtain a
rotation, the wheels’ speed must be all different, and the bigger this difference is the
more the yaw. This way we formed the difference: ω
FL
-ω
FR
and ω
FL
-ω
RL
. The third
input is the lateral acceleration. The hidden layer contains 37 neurons and the output
is shown in Fig. 7. We observed that the estimation of the yaw rate is within a good
±5% tolerance, mainly due to the influence of geometry on this value, rather than
internal variables and given that the slalom training set is exhaustive in this respect
with regard to the large yaw rate values it contains.
41

4.5 Simulation Results – Figures
Following are the figures summarizing the results discusses above, where the
discussion given in §4.1 applies.
0 500 1000 1500
1500
2000
2500
3000
3500
4000
4500
Fz [N]
ve Dy n a
MLP
0 100 200 300 400 500 600
-3000
-2000
-1000
0
1000
2000
Fy [N ]
veDy na
MLP
Fig. 4. Estimation of the vertical reaction
force.
Fig. 5. Estimation results for F
Y.
0 500 1000 15
-0.05
0
0.05
0.1
0.15
Longitudinal Slip
ve Dy n a
MLP
0 200 400 600 800 1000 1200
-0.4
-0.2
0
0.2
0.4
Yaw Rate [rad/s]
ve Dy n a
MLP
Fig. 6. Estimation of wheel slip s.
Fig. 7. Estimation of Yaw Rate dψ/dt.
4.6 Summary
The neural networks described above share a lot of common inputs; therefore they can
be modularly integrated in a single structure as shown in Fig. 8.
Fig. 8. Integrated Neural Network for Vehicle Variable Estimation.
For example, all four networks that calculate the lateral force F
Y
on the wheel have
the same inputs: the steering wheel angle and the lateral acceleration, the only
difference between them is the weights; due to the way each one was trained. Thus we
need to read the value of lrw and a
Y
only once and from there we calculate 4 outputs.
The same is generalized for the other networks described in this paper.
42
5 Robustness of MLP Networks
5.1 Test Against Change in the Driver Model
Neural Networks have been used to improve driver models [12], [13]; however we
limit our study to the PID driver model implemented in veDyna.
This test is done using the Cease maneuver presented above. The a
X
and a
Y
components of the acceleration are passed to the same estimator of the vertical force
F
Z
. The result is shown on Fig 9.
As we can see, the network is able to follow the target result with a total error of
3.86%, but inconsistency appears around the point where the driver suddenly releases
the acceleration pedal, because the network was not trained for this event.
0 500 1000 1500 2000 2500 3000 3500
0
1000
2000
3000
4000
5000
Fz [N]
ve Dy n a
MLP
Fig. 9. Estimation results of F
Z
on the Cease maneuver.
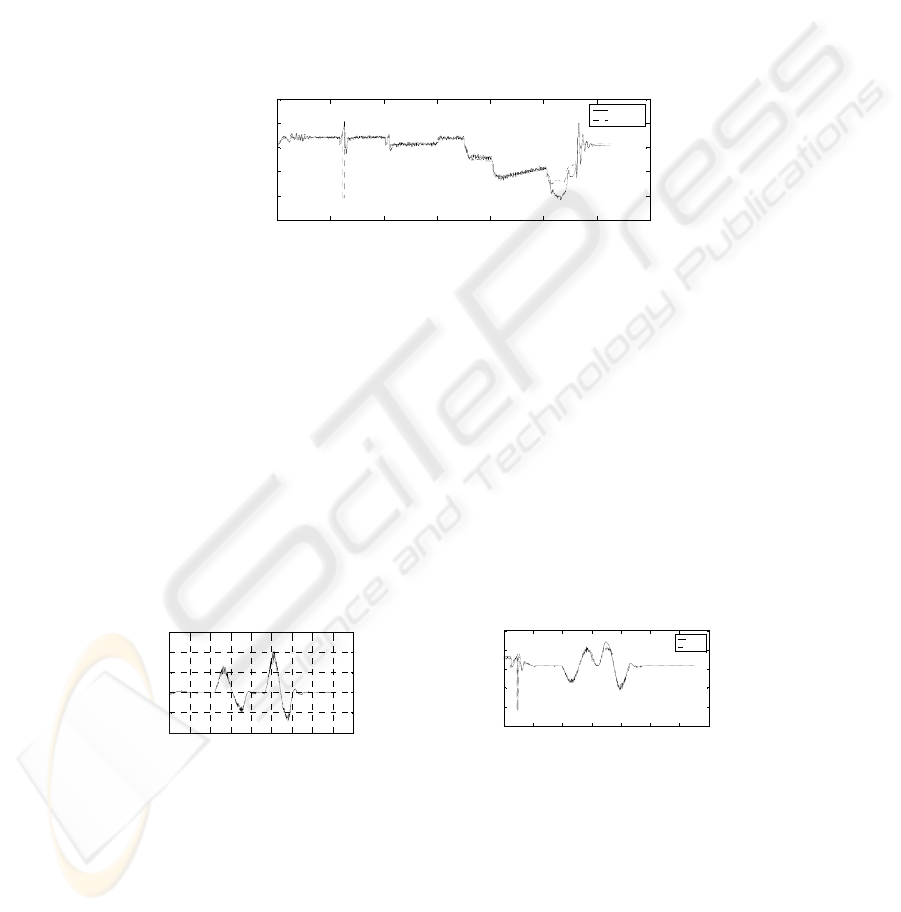
5.2 Test Against Errors at the Inputs
The robustness the MLP networks against errors at their inputs is studied using the
MLP estimator of Fz applied to the double lane change maneuver as a typical
example. The source of error on the inputs can be due to either background noise,
inaccurate sensors or to the method of measurement itself.
We will take the acceleration components a
X
and a
Y
from the double lane change
maneuver and add as much as 20% of uncertainty to the measured values of a
X
and
a
Y
, as per the following equation:
a=(0.8+0.4*rand(2, data_size)).*a;
(5)
where a is the acceleration vector. The effect of this modification on the longitudinal
acceleration is shown on Fig 10 and the estimated force Fz comes with an overall
error of 1.9% as shown on Fig. 11.
0 100 200 300 400 500 600 700 800 900
-1
-0.5
0
0.5
1
1.5
a x w ith n o is e [m /s 2 ]
0 200 400 600 800 1000 1200 1400
0
1000
2000
3000
4000
5000
Fz [N ]
veD y na
MLP
Fig. 10. Effect of 20% inaccuracy on a
Y.
Fig. 11. Estimation of F
Z
with input error.
Similar tests were repeated on other networks with results equivalent in nature,
however an exhaustive study of the tolerance limit is put for future work.
43

6 Conclusion
We used simulated driving maneuvers to test MLP networks for parameter estimation
in a vehicle supervision context. For this purpose, the vertical reaction force, the yaw
rate and the wheel slip have been estimated by neural network systems. The choice of
inputs for the MLPs was inspired from the physical model and the size of the hidden
layers was fixed after an exhaustive range scan up to 60 neurons. With regard to
robustness, and although only a limited number and somewhat particular cases were
studied, all results show that neural networks have an inherent degree of immunity
towards various types of errors. Thus this work concludes that a vehicle operating
system can make use of MLP estimation networks as inputs. This system can be
complementary to the multimedia and GPS services now being offered to passengers.
Its implementation should benefit from the speed of widely available neural network
integrated circuits, leaving any bottleneck to the upper software level.
Finally, the estimation results are best when the data under test is generated by the
same driver as the one used in the training phase. Therefore it is essential that the
networks be trained, under generic procedures, by the drivers that will use them.
References
1. Robert Bosch GmbH: ESP Electronic Stability Program, attributed to group effort (1999)
2. Sala, B.: Digital Device Development Group, Implementing Intelligence in Vehicles, The
Magazine of Engineers Australia, Vol. 76, N° 9, (2004) pp. 26-29
3. Guo, D. L., et al.: Neural Network Control for a Semi-Active Vehicle Suspension with a
Magnetorheological Damper, Journal of Vibration and Control, Vol. 10, No. 3, (2004) pp.
461-471
4. Gao, X. Z., et al: Acceleration signal estimation using neural networks, Measurement.
Science and Technology 12, (2001) pp. 1611-1619
5. He, Y., et al.: Engine Real-time Fault Diagnosis using Neural Networks, Automation
Technology for Off-Road Equipment, Proceedings of the July 26-27 Conference, Chicago,
Illinois, USA (2002), pp. 89-95
6. Weigl, K., Berthod, M.: Neural Networks as Dynamical Bases in Function Space, INRIA,
report N° 2124 (1993)
7. Hornik, K., et al.: Multilayer Feedforward Networks are Universal Function
Approximators, IEEE Transactions on Neural Networks, Vol 2, No. 5, (1989) pp. 359-366
8. Kiencke and Nielsen: Automotive Control Systems, SAE International, Springer (2002)
9. Canudas, C.: Dynamic Tire Friction Models for Vehicle Traction Control, Laboratoire
d’Automatique de Grenoble, Conference on Decision and Control, Phoenix, Arizona (1999)
10. Kim, Y. S., et al.: Development of RT vehicle simulation system for integration of ABS
HIL and a driving Simulator, Department of Automotive Engineering, Kookmin University,
Seoul, Korea.( 1998)
11. TESIS DYNAware veDyna Example Book - Standard Road (2002)
12. Rivals, I., et al.: Real-time control of an autonomous vehicle: A Neural Network Approach
to the Path Following Problem, 5th International Conference on Neural Networks and their
Applications, NeuroNîmes (1993)
13. Lin, Y., et al.: Artificial neural network modeling of driver handling behavior in a driver-
vehicle-environment system, International Journal of Vehicle Design - Vol. 37, No.1,
(2005) pp. 24 – 45
44
