
DETERMINING ELLIPSOIDAL BASINS OF ATTRACTION OF
FUZZY SYSTEMS
Carlos Ari
˜
no and Antonio Sala
Systems Engineering and Control Dept., Univ. Polit
´
ecnica de Valencia
Cno. Vera s/n, 46022 Valencia, Spain
Keywords:
Fuzzy systems, stability, LMI.
Abstract:
This paper discusses how to obtain local stability results from a fuzzy system for which global ones cannot
be obtained, basically due to infeasibility of some associated LMI problems. Two different approaches are
compared: modifying the consequent models vs. setting up some relaxed LMI conditions if bounds on the
memberships are known. Some examples are used to illustrate the approaches.
1 INTRODUCTION
In many literature contributions, LMI stability condi-
tions (Boyd et al., 1994) are devised in order to prove
stability and performance of Takagi-Sugeno (Takagi
and Sugeno, 1985) fuzzy systems; however, such laws
are usually independent of the values of membership
functions, and fulfill for any arbitrary shapes of them
(Tanaka and Wang, 2001; Wang et al., 1996). Knowl-
edge of the shape of the membership functions may
allow to lift some conservativeness.
For instance, if the usual Jacobian linearisation in
x = 0 is stable, Lyapunov 1st theorem states that
there exists a region in which the system is locally
stable. The approach in this paper allows to explicitly
define a minimum spherical zone around the equilib-
rium point where Lyapunov stability conditions are
fulfilled, even in the case global quadratic-stability re-
lated LMIs are infeasible. Indeed, (Tanaka and Wang,
2001) shows that the basin of attraction for fuzzy sys-
tems may be membership dependent.
The structure of the paper is as follows: Next sec-
tion discusses notation and widely-known stability
theorems. Section 3 discusses a transformation of
a fuzzy model when the membership functions are
themselves a convex combination of some vertices.
Section 4 applies the results to find the largest lo-
cal quadratically stable region. Some examples are
provided in Section 5, and a conclusion section sum-
marises the main results.
2 PRELIMINARIES
Let us consider a Takagi-Sugeno (Takagi and Sugeno,
1985) (TS) fuzzy model:
˙x =
n
X
i=1
µ
i
(x)(A
i
· x) (1)
where µ
i
represents membership functions such that:
n
X
i=1
µ
i
(x) = 1, µ
i
(x) > 0 ∀x i : 1 . . . n
Stability of fuzzy systems
Lyapunov stability theory proves that such a system is
stable if exist a function V (x) such that:
V (x) > 0,
dV
dx
< 0, V (0) = 0, ∀ x 6= 0
The analysis of the Lyapunov stability of TS fuzzy
systems may be approached as a linear matrix in-
equality (LMI) optimization problem (Boyd et al.,
1994). The most popular Lyapunov Functions pro-
posed in literature are quadratic forms: V (x) =
x
T
P x. This type of Lyapunov functions fulfill the
srability conditions if P is definite positive and if
˙
V =
n
X
i=1
µ
i
x
T
(A
T
i
P + P A
i
)x < 0 (2)
That holds if
A
T
i
P + P A
i
< 0, i : 1..n (3)
86
Ariño C. and Sala A. (2006).
DETERMINING ELLIPSOIDAL BASINS OF ATTRACTION OF FUZZY SYSTEMS.
In Proceedings of the Third International Conference on Informatics in Control, Automation and Robotics, pages 86-91
DOI: 10.5220/0001203200860091
Copyright
c
SciTePress

The above equation is an LMI, hence widely avali-
able LMI optimization software either finds a P or
determines that the LMI is infeasible. The reader
is referred to (Tanaka and Wang, 2001) for ample
discussion.
Remark: Note that the membership functions µ
do not appear in the LMI conditions. Hence, the same
P defines a quadratic Lyapunov function for multi-
ple nonlinear systems with the same “vertex models”
as the original one. Such generality is a too restrictive
condition that in some cases results in infeasibility be-
ing the underlying system actually stable.
When the above LMI problems are unfeasible,
other alternative conditions must be sought. Fuzzy or
piecewise Lyapunov functions are discussed in (Jo-
hansson, 1999), Fuzzy Lyapunov functions are dis-
cussed in (Oliveira et al., 1999).
A different alternative, in the authors’ opinion,
is trying to achieve local stability results in a zone
around the equilibrium as large as possible. Such a
result is motivated on the first Lyapunov theorem for
local stability: if the linearised system in x = 0 is ex-
ponentially stable, then so it is the nonlinear one, for
initial conditions in a sufficiently small neighborhood
of x = 0.
3 LOCAL FUZZY MODELS
In order to analyze the local stability of a TS fuzzy
model (1) within a region, the original model is
modified using the information of the membership
functions.
Lemma 1 if the membership functions µ(x) of a
fuzzy system described in (1) in a region of Ω can
be themselves expressed as a convex sum of some
vectors v
p
:
µ(x) =
n
v
X
p=1
β
p
(x)v
p
, ∀ x ∈ Ω (4)
where:
µ(x) = [µ
1
(x), µ
2
(x), . . . , µ
n
(x)]
n
v
X
p=1
β
p
(x) = 1 β
p
(x) > 0 ∀x ∈ Ω p : 1 . . . n
v
Then the system can be transformed to:
˙x =
n
v
X
p=1
β
p
(x)A
∗
p
· x (5)
where
A
∗
p
=
n
X
i
v
pi
A
i
(6)
Proof: The expression (4) can be substituted in the
system equation (1):
µ(x) =
n
v
X
p=1
β
p
(x)v
p
(7)
v
p
= [v
p1
, v
p2
, . . . , v
pn
] (8)
µ
i
(x) =
n
v
X
p=1
β
p
(x)v
pi
(9)
˙x =
n
X
i=1
n
v
X
p=1
β
p
(x)v
pi
A
i
· x (10)
˙x =
n
v
X
p=1
β
p
(x)
n
X
i
v
pi
A
i
· x (11)
so the local representation of the system in Ω
˙x =
n
v
X
p=1
β
p
(x)A
∗
p
· x ∀x ∈ Ω
where:
n
v
X
p=1
β
p
(x) = 1 β
p
(x) > 0 ∀x ∈ Ω p : 1 . . . n
v
The convex-combination conditions for the mem-
bership functions required in the above lemmas are
easy to meet. Indeed µ
i
are assumed known in fuzzy
systems. Then, the result below may be applied to
obtain a (possibly conservative) vertex set.
Note 1 Let us consider a region Ω. If bounds µ
M
i
and µ
m
i
on the extremum values of the membership
functions in Ω can be computed, in such a way that:
µ
M
i
≥ max
x∈Ω
µ
i
(x) µ
m
i
≤ min
x∈Ω
µ
i
(x) (12)
then there exist a set of β
p
(x), p = 1, . . . , n
v
so that
the vector of membership functions
µ(x) = [µ
1
(x), µ
2
(x), . . . , µ
n
(x)]
may be expressed in Ω as:
µ(x) =
n
v
X
p=1
β
p
(x)v
p
, x ∈ Ω (13)
where:
n
v
X
p=1
β
p
(x) = 1 β
p
(x) > 0 ∀x ∈ Ω p : 1 . . . n
v
Indeed, the linear restrictions µ
M
i
≥ µ
i
≥ µ
m
i
,
P
i
µ
i
= 1 describe a bounded polytope with a finite
number of vertices (Luenberger, 2003).
DETERMINING ELLIPSOIDAL BASINS OF ATTRACTION OF FUZZY SYSTEMS
87

Well-known linear-programming-related methods
to obtain the membership vector vertices may be used
(related to the obtention of the basic feasible solutions
in an LP problem (Luenberger, 2003)). A related al-
ternative is described below.
Lemma 2 Consider the set Σ
i
of at most 2
n−1
vec-
tors defined by:
Σ
i
= {[˜µ
1
, ..., ˜µ
i−1
, X, ˜µ
i+1
, ..., ˜µ
n
],
X = 1 −
X
1 ≤ j ≤ n
j 6= i
˜µ
j
such that ˜µ
j
∈ {µ
M
j
, µ
m
j
} j 6= i, µ
m
i
≤ X ≤ µ
M
i
}
(14)
Then, the vectors belonging to the set
Σ =
n
[
i=1
Σ
i
(15)
satisfy (13) for some β
p
.
Indeed, as there is only one equality restriction in
memberships, all except one of them are “free” to
attain an extremum value; the remaining one must
fulfill the add-1 restriction and be inside its required
bounds. The above lema produces the union of all the
“all minus one” combinations, and the sought vertices
will belong to such set.
Example. For instance, if three memberships
have minimum and maximum values given by
{0.15,0.3,0.35} and {0.6,0.5,0.4}, the set Σ
1
is origi-
nated by the four combinations:
{(X
1
, 0.3, 0.35), (X
2
, 0.5, 0.35),
(X
3
, 0.3, 0.4), (X
4
, 0.5, 0.4)}
with X
1
= 1 − 0.65 = 0.35, X
2
= 0.15, X
3
= 0.3,
X
4
= 0.1. As X
4
is out of the required range, the
candidate vertices kept are:
Σ
1
= {(0.35, 0.3, 0.35), (0.15, 0.5, 0.35),
(0.3, 0.3, 0.4)}
The set Σ
2
is generated by:
{(0.15, X
1
, 0.35), (0.6, X
2
, 0.35),
(0.15, X
3
, 0.4), (0.6, X
4
, 0.4)}
with X
1
= 0.5, X
2
= 0.05, X
3
= 0.45 and X
4
= 0.
Hence,
Σ
2
= {(0.15, 0.5, 0.35), (0.15, 0.45, 0.4)}
Regarding the third membership,
{(0.15, 0.3, X
1
), (0.6, 0.3, X
2
),
(0.15, 0.5, X
3
), (0.6, 0.5, X
4
)}
results in
Σ
3
= {(0.15, 0.5, 0.35)}
hence the resulting set of vertices to compute the local
models is:
Σ = {(0.35, 0.3, 0.35), (0.15, 0.5, 0.35),
(0.3, 0.3, 0.4), (0.15, 0.45, 0.4)}
4 STABILITY ANALYSIS IN A
ZONE
The knowledge of the membership functions will al-
low to obtain some local stability analysis results for
a fuzzy systems. Two alternatives may be applied:
the first one will use the above defined local models;
the second one will use some relaxations on LMI con-
ditions via additional variables and knowledge of the
minimum and maximum bounds on membership.
4.1 Local Fuzzy Models
By using the transformed models discussed in the pre-
vious section, local stability results may be obtained
by the lemmas in Section 2.
Lemma 3 The ellipsoidal region Ω
∗
⊂ Ω
Ω
∗
= {x \x
T
P x ≤ V
M
, P > 0} (16)
is a basin of attraction of the equilibrium point x = 0
of the system (1) if
(17)
V
M
≤ min{x
T
P x \x ∈ ∂Ω} (18)
where ∂Ω denotes the boundary of Ω and P verifies:
A
∗
p
T
P + P A
∗
p
< 0 p : 1, . . . , n
v
(19)
i.e., all trajectories with initial state in Ω
∗
converge
assymptotically to x = 0.
Proof: As, by Lemma 1, the system can be ex-
pressed in Ω as:
˙x =
n
v
X
p=1
β
p
(x)A
∗
p
· x
if the LMI (19) is feasible for a positive definite matrix
P , V (x) = x
T
P x is a decreasing function with time,
so a Lyapunov function has been obtained ensuring
that Ω
∗
is an invariant set. La Salle’s theorem (Khalil,
1996) ensures that every solution starting in Ω
∗
will
approach x = 0.
As the expression of the local system (5) is not valid
outside Ω, then the local stability can only be proved
in the largest ellipsoid Ω
∗
contained in Ω, which will
be defined by a value of V
m
equal to the minimum
value of V (x) in the boundary of Ω (∂Ω).
ICINCO 2006 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
88

The following lemma is useful in order to set up
an LMI characterisation of the largest ellipsoid in Ω
which is a Lyapunov equipotential
1
.
Suppose Ω defined as a symmetric polytope that
contains x = 0:
Ω = {x\|a
T
i
x| ≤ 1i : 1, ..., n
p
} (20)
Lemma 4 Θ = {x\x
T
Q
−1
x ≤ 1}, Q = Q
T
> 0
is an ellipsoid contained in Ω which itself contains
the maximum volume sphere centered at x = 0 if the
LMI problem
minimize λ
subject to λI > Q
−1
> 0
Q > 0, a
T
1
Qa
i
≤ 1, i = 1, ...n
p
is feasible. Then, no other ellipsoid in Ω contains a
larger centered sphere.
The proof appears in (Boyd et al., 1994) chapter 3.
Theorem 1 Consider the system (1). The largest
spherical basin of attraction of x = 0 provable by
a quadratic Lyapunov function in a symmetric poly-
topic region Ω has a radius λ
−
1
2
given by the solution
of the following LMI problem:
minimize λ subject to
λI > P > 0 (21)
P > 0 (22)
P a
j
a
T
j
1
> 0, j : 1...n
p
(23)
A
∗
p
T
P + P A
∗
P
< 0, p : 1...n
v
(24)
and Ω is defined as (20). The ellipsoid Θ =
{x\x
T
P x ≤ 1} is, of course, also contained in the
basin of attraction of x = 0.
Proof: Conditions 24 imply that trajectories inside
any equipotential region defined by P converge to the
point x = 0, as shown in Lemma 3.
Applying the Schur complement, the conditions (23)
are equivalent to
a
T
p
P
−1
a
p
< 1, i : 1..n
p
Then, conditions (23) keep Θ inside Ω and the condi-
tion (21) along with the LMI objective, maximize the
radius of the quadratically invariant sphere contained
in Θ, from Lemma 4.
1
Largest is here understood as containing the largest
spherical ball around x = 0, i..e, guaranteeing stability for
the largest initial distance to the origin.
4.2 Relaxed LMI Conditions
Another way to approach the problem is relaxing
the LMI conditions using que information about the
membership functions µ
i
in the zone Ω in which lo-
cal stability is studied. This will allow to express
some results (possibly more conservative than the pre-
vious one) using the minimum and maximum val-
ues of memberships in the zone (or some bounds on
them), without the need of calculating transformed lo-
cal models.
Assume that, in the zone Ω, the limits of µ
j
are
µ
m
j
≤ µ
j
≤ µ
M
j
(25)
Then, for any positive τ ∈ R:
µ
j
τ ≤ µ
M
j
τ = µ
M
j
n
X
i=1
µ
i
τ (26)
where
P
n
i=1
µ
i
= 1 has been used in the equality.
Then, for any positive definite N
M
j
:
µ
j
x
T
N
M
j
x ≤ µ
M
j
n
X
i=1
µ
i
x
T
N
M
j
x (27)
Hence, the term
n
X
i=1
µ
i
µ
M
j
x
T
N
M
j
x − µ
j
x
T
N
M
j
x > 0
may be added to the stability condition (3), so that if
n
X
i=1
µ
i
x
T
(A
T
i
P + P A
i
)x +
n
X
i=1
µ
i
µ
M
j
x
T
N
M
j
x
−µ
j
x
T
N
M
j
x < 0 (28)
then, the equation (2) holds. Reordering the terms,
the LMI conditions below are obtained:
(A
T
i
P + P A
i
) + µ
M
j
N
M
j
< 0, ∀i 6= j (29)
(A
T
j
P + P A
j
) − (1 − µ
M
j
)N
M
j
< 0, N
M
j
> 0 (30)
and adding the condition µ
m
j
≤ µ
j
, for any positive
symmetric matrix N
m
j
, the expression
µ
j
x
T
N
m
j
x −
n
X
i=1
µ
i
µ
m
j
x
T
N
m
j
x > 0 (31)
can be proved analogously to the maximum N
M
j
case.
Then (2) is positive if
(A
T
i
P + P A
i
) + µ
M
j
N
M
j
−µ
m
j
N
m
j
< 0 ∀i 6= j (32)
(A
T
j
P + P A
j
) − (1 − µ
M
j
)N
M
j
+(1 − µ
m
j
)N
m
j
< 0, N
M
j
, N
m
j
> 0 (33)
Note that, in the above expressions, j is a fixed
number. If a bound of µ
j
is known for all j, the theo-
rem below can be proved.
DETERMINING ELLIPSOIDAL BASINS OF ATTRACTION OF FUZZY SYSTEMS
89
Theorem 2 Consider the system (1). The largest
spherical basin of attraction of x = 0 provable by
a quadratic Lyapunov function in a symmetric poly-
topic region Ω has a radius λ
−
1
2
given by the solution
of the following LMI problem in the variables P , N
m
i
,
N
M
i
:
minimize λ subject to
λI > P > 0 (34)
P > 0 (35)
P a
j
a
T
j
1
> 0, j : 1...n
p
(36)
A
i
T
P + P A
i
− (1 − µ
M
i
)N
M
i
+ (1 − µ
m
i
)N
m
i
+
X
j6=i
(µ
M
j
N
M
j
− µ
m
j
N
m
j
) < 0, i : 1...n (37)
and Ω is defined as (20). The ellipsoid Θ =
{x\x
T
P x ≤ 1} is, of course, also contained in the
basin of attraction of x = 0.
4.3 Algorithm
The results in previous sections may be combined in
order to obtain an algorithm to compute the largest
ball around x = 0 for which attraction is ensured.
Basically, the procedure will first check the extreme
cases: (1) checking for feasibility of LMI problems
as stated in Section 2 (2) checking for stability of the
linearised model around x = 0.
If the first one is unfeasible but the second one
is feasible, selecting a polytopic region on the state
space and a scaling factor ρ allows to set up a bisec-
tion procedure in order to determine the largest feasi-
ble ρ.
5 EXAMPLES
Example 1. Let us have a fuzzy system given by:
˙x =
2
X
i=1
µ
i
(x)A
i
x (38)
A
1
=
−0.5 −1
−1 −0.5
(39)
A
2
=
−0.5 1
1 −0.5
(40)
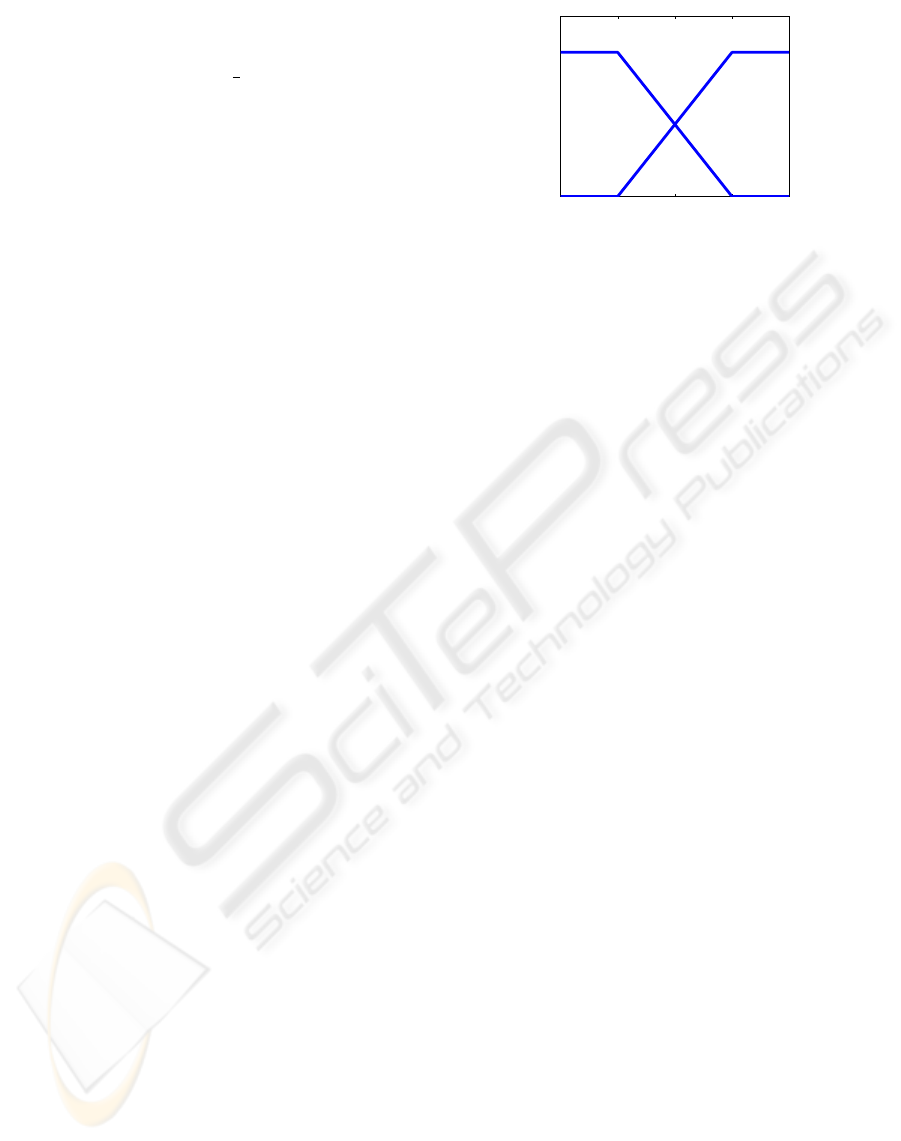
Figure 1 shows the membership functions µ
1
and µ
2
which, for simplicity, depend only on x
2
. The value
of a = 1 will be assumed.
µ
1
µ
2
x
2
1
a
−a
0
0
Figure 1: Membership functions µ
1
(x
2
), µ
2
(x
2
).
Define Ω
k
as a rectangle bounded in x
2
, unbounded
in x
1
:
Ω
k
= {x\ |(0 1/ρ
k
)x| ≤ 1}
where k is the iteration number.
Note that the maximum and minimum values of µ
i
in Ω are easily obtained, and the Lemma 4 can be
applied.
In the proposed procedure, the LMIs for ρ = 1 are
unfeasible. However, the linearised model is:
˙x = (0.5A
1
+ 0.5A
2
)x =
−0.5 0
0 −0.5
(41)
which is stable. Hence, there exists a zone around
x = 0 (possibly small) where local stability holds.
The procedures in this paper allow to determine the
largest sphere around x = 0 for which local quadratic
stability holds.
Let us consider for the fist iteration ρ
1
= 0.1. The
maximum and minimum values of µ are, in that case:
µ
M
1
= 0.55, µ
m
1
= 0.45, µ
M
2
= 0.55, µ
m
2
= 0.45
Then the vertices obtained in the region Ω
1
are:
v
1
= [
0.45 0.55
]
v
2
= [
0.55 0.45
]
The local fuzzy model from Lemma 1 is described by:
A
∗
1
=
−0.5 0.1
0.1 −0.5
A
∗
2
=
−0.5 −0.1
−0.1 −0.5
And, solving the LMIs:
A
∗
1
T
P + P A
∗
1
< 0
A
∗
2
T
P + P A
∗
2
< 0
X > 0
local stability in a certain ellipsoidal region inside Ω
1
is proved.
When the same procedure is applied to ρ = 0.5 the
LMIs are unfeasible. The LMIs are, however, feasible
ICINCO 2006 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
90
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
x
1
x
2
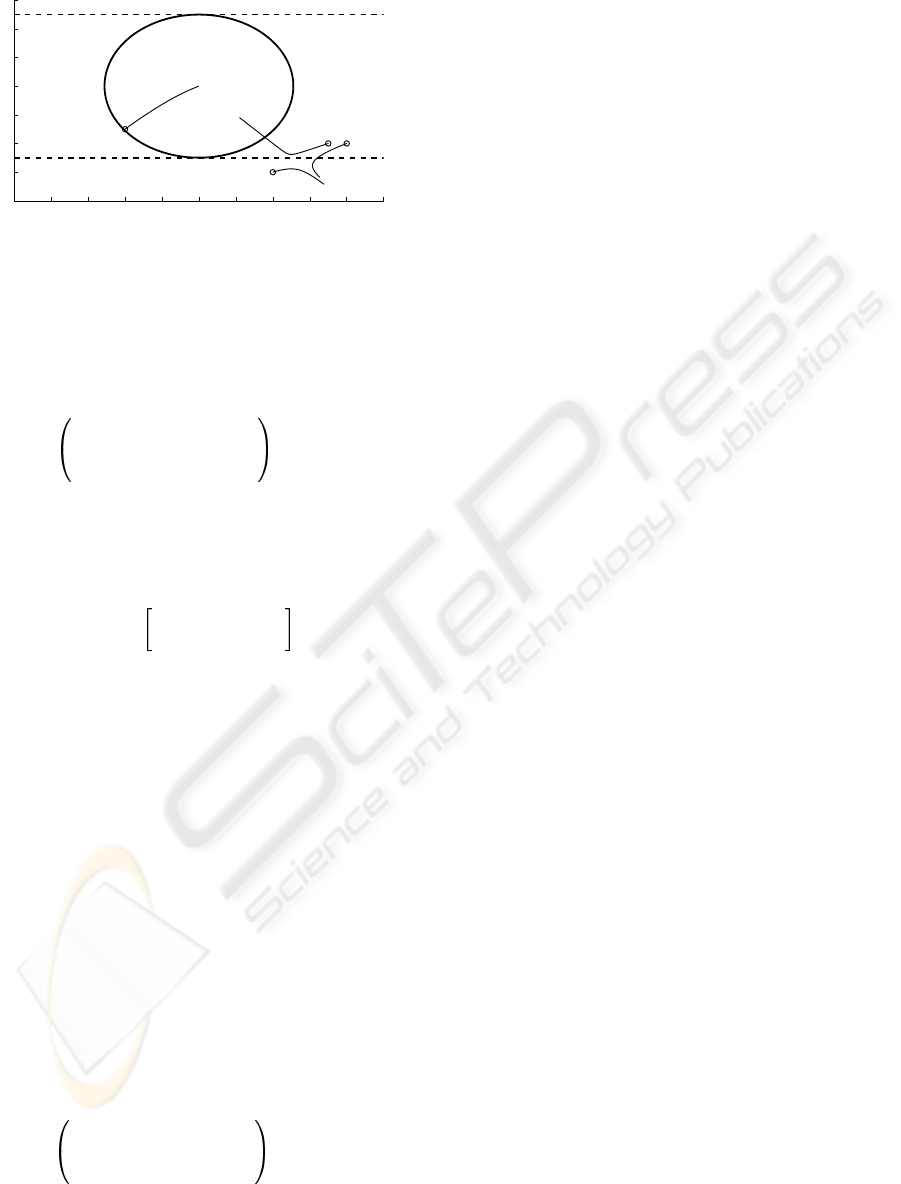
Θ
Ω
Figure 2: The Basin of attraction of x = 0 provable by
quadratic stability (Example 1).
for any ρ < 0.5. for instance, ρ
n
= 0.499 results in
the following LMI conditions:
A
∗
1
T
P + P A
∗
1
< 0
A
∗
2
T
P + P A
∗
2
< 0
P
0
1/ρ
n
0 1/ρ
n
1
> 0
P > 0
λI > P
which are feasible for the above value of ρ
n
and, the
matrix P obtained for the minimum λ defines an ellip-
soidal basin of atraction Θ = {x\x
T
P x ≤ 1} with
P =
3.8274 0
0 4.016
Figure 2 depicts the obtained basin of attraction,
and some examples of trajectories from a set of start-
ing points. The maximum circle found by the LMI
toolbox has a radius of 0.499.
Trajectories with starting points inside the ellipsoid
Θ are guaranteed to converge to the origin. Note that
the ellipsoid obtained by the LMIs is not a circle.
Points outside the ellipsoid may lead to either con-
vergent or non-convergent trajectories.
Example 2. Let us considerer the same fuzzy
model as in Example 1. Then applying the theorem
2,
minimize λ subject to
(A
T
1
P + P A
1
) − (1 − µ
M
1
)N
M
j
+ (1 − µ
m
1
)N
m
1
+µ
M
2
N
M
2
− µ
m
2
N
m
2
< 0 ∀i 6= j
(A
T
2
P + P A
2
) − (1 − µ
M
2
)N
M
j
+ (1 − µ
m
2
)N
m
2
+µ
M
1
N
M
1
− µ
m
1
N
m
1
< 0
P
0
1/ρ
n
0 1/ρ
n
1
> 0
P , N
M
1
, N
m
1
, N
M
2
, N
m
2
> 0
λI > P
Conveniently, we take the same region shape Ω that
in Example 1, the limits µ
m
i
and µ
M
j
are the mini-
mum and maximum value of µ
i
in the region Ω. The
maximum ρ obtained is 0.26, i.e. 0.24 units less than
the obtained in the previous example. From this ex-
ample, the conditions discussed in Section 4.2 seem
more conservative than those in Section 4.1.
6 CONCLUSIONS
This paper shows how local stability results (the
largest sphere around x = 0 for which a quadratic
Lyapunov function can be proven via LMI) may
be obtained in fuzzy systems via the knowledge of
the membership functions, even when no feasible
quadratic Lyapunov function can be found to prove
global stability. The found sphere is part of a larger
ellipsoidal guaranteed basin of attraction.
In this way, if the linearised system around the
equilibrium is stable, a precise characterisation of the
local stability region stated in Lyapunov 1st theorem
is achieved.
The approach based on relaxed LMI conditions
from membership bounds yields more conservative
results but it is simpler, without the need of changing
the Takagi-Sugeno consequents.
REFERENCES
Boyd, S., ElGhaoui, L., Feron, E., and Balakrishnan, V.
(1994). Linear matrix inequalities in system and con-
trol theory. Ed. SIAM, Philadelphia, USA.
Johansson, M. (1999). Piecewise quadratic stability of
fuzzy systems. IEEE Trans. Fuzzy Syst., 7:713–722.
Khalil, H. (1996). Nonlinear Systems (2nd. ed.). Ed.
Prentice-Hall, Upper Saddle River, New Jersey, USA.
Luenberger, D. (2003). Linear and Nonlinear Program-
ming. Springer, 2nd edition.
Oliveira, M. d., Bernussou, J., and Geromel, J. (1999).
Anew discrete-time robust stability condition. System
& Control Letters, 37:261–265.
Takagi, T. and Sugeno, M. (1985). Fuzzy identification
of systems and its applications to modelling and con-
trol. IEEE Trans. on Systems, Man and Cybernetics,
15(1):116–132.
Tanaka, K. and Wang, H. O. (2001). Fuzzy control systems
design and analysis. Ed. John Wiley & Sons, New
York, USA.
Wang, H. O., Tanaka, K., and Griffin, M. F. (1996). An
approach to fuzzy control of nonlinear systems: Sta-
bility and design issues. IEEE Transactions on Fuzzy
Systems, 4:14–23.
DETERMINING ELLIPSOIDAL BASINS OF ATTRACTION OF FUZZY SYSTEMS
91
