
ON JUST IN TIME CONTROL OF SWITCHING MAX-PLUS
LINEAR SYSTEMS
Michel Alsaba, S
´
ebastien Lahaye and Jean-Louis Boimond
LISA
62 avenue Notre Dame du Lac - Angers, France
Keywords:
Discrete event systems, (max, +) algebra, switching max-plus linear systems, just in time control.
Abstract:
Discrete event systems involving synchronization and delay phenomena can be described by a linear state rep-
resentation over (max, +) algebra. Some discrete event systems involving choice phenomena could be trans-
formed, under some conditions, into switching max-plus linear systems modeled as automata. The switching
between states of these automata is governed by a switching variable. This paper deals with the just in time
control of these switching max-plus linear systems. The control problem we propose is optimal under just in
time criterion when the switching variable is given on the study horizon.
1 INTRODUCTION
The class of Discrete Event Systems (DES) essen-
tially consists of man-made systems that contain a fi-
nite number of ressources (such as machines, commu-
nications channels, or processors) shared by several
users (such as product types, information packets, or
jobs) all of which contributing to the achievement of
some common goal as the assembly of products, the
end to end transmission of a set of information pack-
ets, or a parallel computation, (Baccelli et al., 1992).
In general, models of DES are nonlinear in conven-
tional algebra. However, there exists a class of DES
which have been shown to be linear in a particular al-
gebraic structure, namely max-plus algebra (Baccelli
et al., 1992). The so-called max-plus linear systems
involve only synchronization and delay phenomena
(but no conflict) which are basically modeled by max-
imization and addition operations. Regarding Timed
Petri Nets (TPN) which enable to model (and partly
analyze) a wide variety of DES, max-plus linear sys-
tems mainly fit to the subclass of Timed Event Graphs
(TEG).
Several studies have attempted to widen the class
of DES likely to be analyzed thanks to max-plus al-
gebraic tools. Among those works, we focus in this
paper on the so-called switching max-plus linear sys-
tems which have been introduced in (van den Boom
and de Schutter, 2004). They can be seen as an au-
tomaton switching between several max-plus linear
state representations. They are an adequate tool to
model DES in which several modes of operation take
effect. Beside max-plus linear models, switching al-
low to take into account additional phenomena such
as breaks of synchronization and changes in events
occurrences order. In (van den Boom and de Schutter,
2004), authors have proposed a model predictive con-
trol for such systems to optimize their behavior. In
this paper, we tackle another control problem, namely
the output tracking problem with respect to just in
time criterion. This control have been extensively
studied for max-plus linear systems notably in (Cohen
et al., 1989), (Menguy et al., 2000). Under particular
assumptions, we show that switching max-plus lin-
ear systems admit representations and a just-in-time
control solution inspired by those of max-plus linear
time-varying systems (Lahaye et al., 1999). The con-
tribution lies in the possibility to take into account
changes in the system structure while only parame-
ters may vary in the time-varying case.
This paper is organized as follows. Some results
used in the sequel are recalled in the second section.
A general presentation about switching max-plus lin-
ear systems is given in the third section. We expose
the JIT control problem of such systems in the fourth
section. We give two applications in the fifth section.
79
Alsaba M., Lahaye S. and Boimond J. (2006).
ON JUST IN TIME CONTROL OF SWITCHING MAX-PLUS LINEAR SYSTEMS.
In Proceedings of the Third International Conference on Informatics in Control, Automation and Robotics, pages 79-84
DOI: 10.5220/0001204200790084
Copyright
c
SciTePress

2 PRELIMINARIES
2.1 Algebraic Tools
2.1.1 Dioid
See (Cohen et al., 1989), (Baccelli et al., 1992, §4) for
an exhaustive presentation of dioid theory.
A dioid (D, ⊕, ⊗) is an idempotent
1
semiring, neu-
tral elements of ⊕ and ⊗ are denoted ε and e respec-
tively. The symbol ⊗ is often omitted.
A dioid D is complete if it is closed for infinite
sums and if the product distributes over finite and in-
finite sums. The upper bound of a complete dioid,
denoted ⊤ (for Top), is the sum of all dioid elements
and it is absorbing for the addition.
An order relation, noted , can be associated with
a dioid D by the following equivalence: ∀ a, b ∈
D, a b ⇔ a = a ⊕ b. This order relation con-
fers upon complete dioid a structure of complete lat-
tice. So, we can introduce an operator Inf, denoted
∧, verifying:
∀ a, b ∈ D, a b ⇔ b = a ∧ b.
Example 1 The set Z ∪ {−∞, +∞}, endowed with
the max operator as additive law and the classical
sum as product, is a complete dioid, usually denoted
by
Z
max
, with ε = −∞, e = 0 and ⊤ = +∞.
If D is a dioid, the set D
n×n
of n × n matri-
ces with coefficients in D is also a dioid. Sum
and product are defined in the following way:
(A ⊕ B)
ij
= A
ij
⊕ B
ij
, (A ⊗ B)
ij
=
n
k=1
A
ik
⊗ B
kj
.
Theorem 1 Over a complete dioid D, the implicit
equation x = ax ⊕ b admits a
∗
b as least solution
where a
∗
=
L
i∈N
a
i
with a
0
= e.
2.1.2 Residuation Theory
A complete presentation of this theory is given in
(Blyth and Janowitz, 1972), see (Baccelli et al., 1992,
§4.4) for a specialization to dioid.
Residuation theory provides, under some assump-
tions, the greatest solution to inequality f(x) b,
where f is an isotone mapping
2
defined over ordered
sets.
An isotone mapping f : D → F, where (D,
D
)
and (F,
F
) are ordered sets, is a residuated mapping
if for all b ∈ F the upper bound of the subset {x ∈
D|f(x)
F
b} exists and belongs to this subset.
Theorem 2 Let f : D → F be an isotone mapping
from the complete dioid (D,
D
) into the complete
dioid (F,
F
). The following statements are equiva-
lent:
1
∀a ∈ D, a ⊕ a = a.
2
f is an isotone mapping if a b ⇒ f (a) f(b).
(i) f is residuated.
(ii) There exists a unique isotone mapping f
♯
: F →
D, called residual, such that f ◦ f
♯
F
id
F
and
f
♯
◦f
D
id
D
where id
F
and id
D
are identity map-
pings in F and D respectively.
Example 2 Mappings L
a
: x 7→ a ⊗ x and
R
a
: x 7→ x ⊗ a defined over a complete dioid D are
both residuated. Their residuals are usually denoted
by L
♯
a
(x) = a
◦
\x and R
♯
a
(x) = x
◦
/a respectively.
These ’quotients’ satisfy the following formulae:
a ⊗ (a
◦
\x) x, (x
◦
/a) ⊗ a x, (i)
a
◦
\(x ∧ y) = (a
◦
\x) ∧ (a
◦
\y), (ii)
(x ∧ y)
◦
/a = (x
◦
/a) ∧ (y
◦
/a), (iii)
(a ⊗ b)
◦
\x = b
◦
\(a
◦
\x), x
◦
/(a ⊗ b) = (x
◦
/b)
◦
/a. (iv)
3 LINEAR SYSTEMS
3.1 Max-plus Linear Systems
It has been shown that DES involving synchronization
and delay phenomena (but no choice phenomenon)
can be described by a linear state representation over
dioid
Z
max
(see (Baccelli et al., 1992) for a detailed
presentation):
x(k) = A(k )x(k − 1) ⊕ B(k)u(k),
y(k) = C(k)x(k).
(1)
Such systems are usually referred to as (max, +)
linear systems. The index k is called the event
counter. Entries of state vector x(k) are daters func-
tions expressing the time instants at which the internal
events occur for the k-th time. Similarly, vectors u(k)
and y(k ) contain daters associated respectively with
input and output events.
3.2 Switching Max-plus Linear
Systems
We now consider so-called switching max-plus linear
systems introduced and studied in (van den Boom and
de Schutter, 2004). This class of systems corresponds
to DES that can switch between different modes of
operation. In each mode l = 1, ..., q, the system is
described by a (max, +) linear state space model:
x(k) = A
(l)
(k )x(k − 1) ⊕ B
(l)
(k )u(k),
y(k) = C
(l)
(k )x(k).
(2)
in which the matrices A
(l)
, B
(l)
and C
(l)
are the sys-
tem matrices for the l-th mode. In general the switch-
ing allows to model a change in the structure of the
system, such as breaking a synchronization or chang-
ing the events occurrences order (several examples are
proposed in (van den Boom and de Schutter, 2004)).
ICINCO 2006 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
80

The moments of switching are determined by a
switching mechanism. A switching variable σ(k)
is defined, which may depend on the previous state
x(k − 1), the previous mode l(k − 1), the input vari-
able u(k) and/or an external decision variable v(k):
σ(k) = Φ(x(k − 1), l(k − 1), u(k), v(k)) ∈ R
n
σ
. (3)
Set R
n
σ
is partitioned in q subsets Z
(i)
, i = 1 . . . q.
The mode l(k) is now obtained by determining in
which subset σ(k) is for event k. So if σ(k) ∈ Z
(i)
,
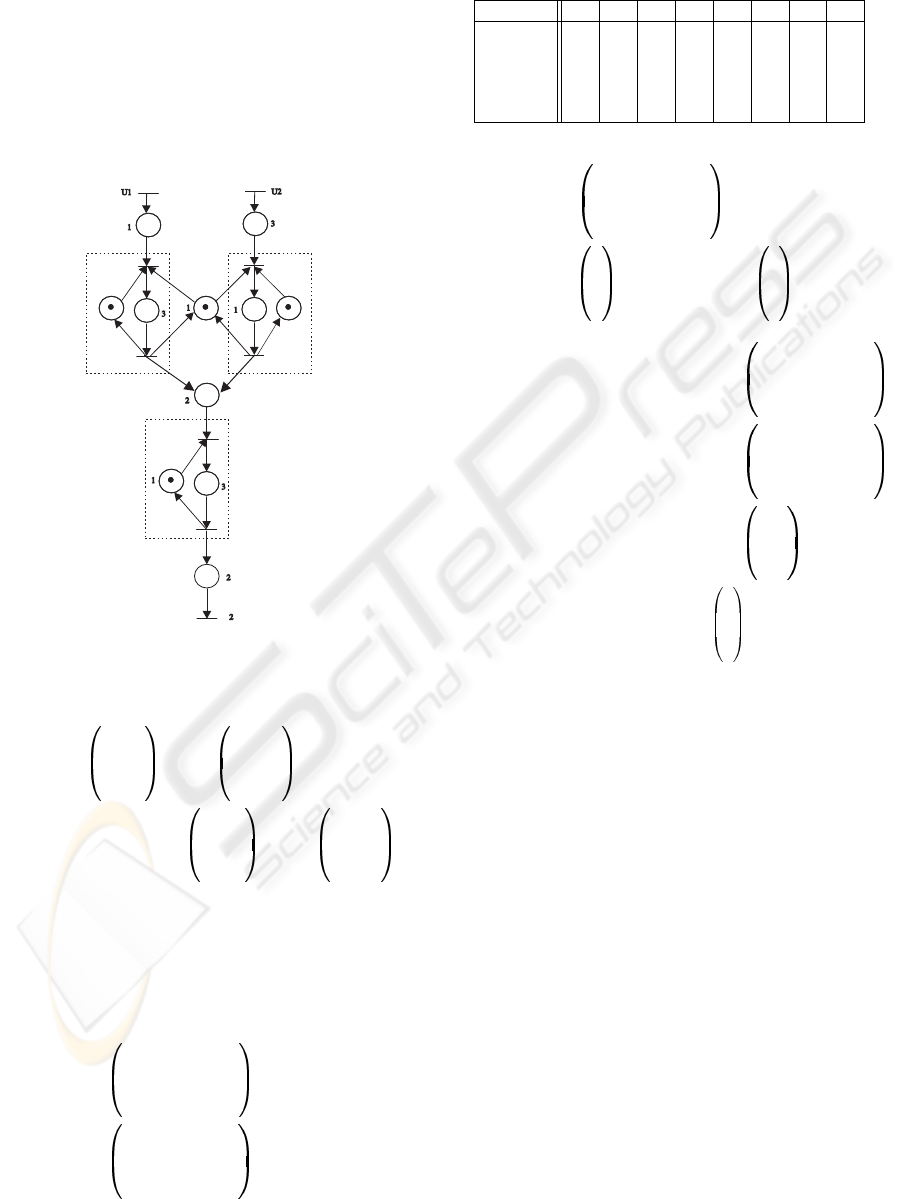
then l(k ) = i. We represent on figure 1 a simple
switching max-plus linear system with two modes.
Figure 1: A simple switching max-plus linear system.
4 REPRESENTATIONS AND JUST
IN TIME CONTROL OF
SWITCHING MAX-PLUS
LINEAR SYSTEMS
In this section, we first focus on representations of
switching max-plus linear systems. Assuming that
the switching variable is known on the study hori-
zon, we explicit the solution of state equation (2) and
identify its impulse response. The obtained represen-
tations are reminiscent of those of (max, +) linear
time-varying systems (Lahaye et al., 1999), except
that structures of implied matrices may vary along
evolution in the switching case, while only parame-
ters may vary in the time-varying case.
From these representations, we can next tackle a
control problem for switching max-plus linear sys-
tems, namely the output tracking problem with re-
spect to just in time criterion.
4.1 Representations
In the following, we assume that switching variable
σ(k) is known on the study horizon. Referring to
equation (3), this may happen in particular if:
1. σ(k) = Φ(v(k)), in which the external decision
variable v(k) is supposed to be given on the study
horizon.
2. σ(k) = Φ(l(k − 1)), where function l(k), stating
the mode at step k according to the previous one, is
supposed to be given on the study horizon.
So the first equation of (2) can be written for k ≥
k
0
:
x(k) = Φ(k, k
0
)x(k
0
) ⊕
k
L
j=k
0
+1
Φ(k, j)B
(l)
(j)u(j)
where Φ(k, i) is the transition matrix given by:
Φ(k, i) =
not defined if i > k,
Id if i = k,
A
(l)
(k )A
(l)
(k − 1)...A
(l)
(i + 1) otherwise.
Then, we deduce the output:
y(k) = C
(l)
(k)Φ(k, k
0
)x(k
0
) ⊕
k
j=k
0
+1
C
(l)
(k)Φ(k, j)B
(l)
(j)u(j)
(4)
Remark 1 The state-transition matrix satisfies the
composition property
Φ(k, i) = Φ(k, j) ⊗ Φ(j, i), where k ≥ j ≥ i,
and in particular for k ≥ i + 1
Φ(k, i) = A
(l)
(k)Φ(k−1, i) = Φ(k, i+1)A
(l)
(i+1).
Proposition 1 The least solution of equations (2) is
given by ∀k ∈ Z, ¯y(k) =
L
j≤k
h(k, j)u(j) with
h(k, j) = C
(l)
(k)Φ(k , j)B
(l)
(j), for j ≤ k.
h is called the impulse response of the system.
Proof By tending k
0
towards −∞ in equation (4),
it is clear that any solution is greater than ¯y.
Setting ¯y(k ) = C
(l)
(k)¯x(k) with
¯x(k) =
L
j≤k
Φ(k, j)B
(l)
(j)u(j),
We show that ¯x satisfies the first equation of (2):
¯x(k) =
j≤k
Φ(k, j)B
(l)
(j)u(j),
=
j≤k−1
Φ(k, j)B
(l)
(j)u(j) ⊕ B
(l)
(k )u(k),
= A
(l)
(k )[
j≤k−1
Φ(k − 1, j)B
(l)
(j)u(j)]
⊕B
(l)
(k )u(k), (thanks to remark 1)
= A
(l)
(k )¯x(k − 1) ⊕ B
(l)
(k )u(k).
ON JUST IN TIME CONTROL OF SWITCHING MAX-PLUS LINEAR SYSTEMS
81

4.2 Just In Time Control of
Switching Max-plus Linear
Systems
4.2.1 Description
Strong analogies appear between the classical linear
system theory and the (max, +) linear system the-
ory. In particular, the concept of control is now well
defined for these systems. A greatest control, based
on residuation theory (Blyth and Janowitz, 1972), has
been proposed in (Cohen et al., 1989), (Menguy et al.,
2000). For a given reference input (i.e., desired dates
of occurrence for output events) Z = {z(k)}
k=0,..,k
f
,
the control yields the latest dates of occurrence for
input events U = {u(k)}
k=0,..,k
f
in order that the
output events Y = {y(k)}
k=0,..,k
f
occur before the
reference input. Such a greatest control is called
Just In Time (JIT) control. In a production context,
it amounts to satisfying the customer demand while
minimizing the stocks. Using representations pro-
posed at section 4.1, we propose a JIT control for
switching Max-plus linear systems.
4.2.2 Control Problem for Switching Max-plus
Linear Systems
Proposition 2 From proposition 1, the output y of a
switching max-plus linear system can be written as
y = H(u) where [H(u)](k) =
L
j≤k
h(k, j)u(j).
Then the JIT optimal control, denoted u
opt
(k), is
given by:
u
opt
(k) = [H
♯
(z)](k) =
V
j≥k
h(j, k)
◦
\z(j).
Proof We denote ω the signal defined by:
∀k ∈ Z, ω(k) =
V
j≥k
h(j, k)
◦
\z(j).
1. Let x satisfying H(x) Z or equivalently,
∀k ∈ Z,
L
i∈Z
h(k, i)x(i) =
L
i≤k
h(k, i)x(i) z(k)
∀k, i ∈ Z, i ≤ k; h(k, i)x(i) z(k)
∀k, i ∈ Z, i ≤ k; x(i) h(k, i)
◦
\z(k)
∀i ∈ Z, x(i)
V
k≥i
h(k, i)
◦
\z(k) = ω(i)
2. Using (i),∀k ∈ Z,
L
i∈Z
h(k, i)ω(i) =
L
i∈Z
h(k, i)[
V
j≥i
h(j, i)
◦
\z(j)]
L
i∈Z
h(k, i)[h(k, i)
◦
\z(k)]
L
i∈Z
z(k) = z(k) which
shows that ω is solution of H(x) Z.
In the following, we show that u
opt
is solution
of a system of recurrent equations which proceed
backwards in event index. These equations offer a
strong analogy with the adjoint-state equations of
optimal control theory. Firstly let us remark using
(iv) that:
u
opt
(k ) =
j≥k
h(j, k)
◦
\z(j)
=
j≥k
(C
(l)
(j)Φ(j, k)B
(l)
(k ))
◦
\z(j)
=
j≥k
B
(l)
(k )
◦
\[(C
(l)
(j)Φ(j, k))
◦
\z(j)]
= B
(l)
(k )
◦
\
¯
ξ
when setting
¯
ξ(k) =
V
j≥k
(C
(l)
(j)Φ(j, k))
◦
\z(j).
Proposition 3 The greatest solution of equation:
ξ(k) = A
(l)
(k + 1)
◦
\ξ(k + 1) ∧ C
(l)
(k )
◦
\z(k) (5)
is given by:
¯
ξ(k) =
V
j≥k
(C
(l)
(j)Φ(j, k))
◦
\z(j).
Proof
1. Let us first show that
¯
ξ is solution of equation (5).
∀k ∈ Z,
A
(l)
(k + 1)
◦
\
¯
ξ(k + 1) ∧ C
(l)
(k)
◦
\z(k)
= A
(l)
(k + 1)
◦
\[
V
i≥k+1
(C
(l)
(i)Φ(i, k + 1))
◦
\z(i)] ∧
C
(l)
(k)
◦
\z(k)
=
V
i≥k+1
(C
(l)
(i)Φ(i, k + 1)A
(l)
(k + 1))
◦
\z(i) ∧
C
(l)
(k)
◦
\z(k) (thanks to (ii) and (iv))
=
V
i≥k+1
(C
(l)
(i)Φ(i, k))
◦
\z(i) ∧
(C
(l)
(k)Φ(k , k ))
◦
\z(k) (see remark 1)
=
V
i≥k
(C
(l)
(i)Φ(i, k))
◦
\z(i) (thanks to (ii))
=
¯
ξ(k)
2. Let {ξ(k)}
k∈Z
a solution of equation (5), we have
∀k ∈ Z
ξ(k) = Φ(k + k
0
, k)
◦
\ξ(k + k
0
) ∧
k+k
0
−1
V
j=k
(C
(l)
(j)Φ(j, k))
◦
\z(j), k
0
≥ 1.
With k
0
→ +∞, it is clear that ∀k, ξ(k)
¯
ξ(k).
So finally, {u
opt
(k)}
k∈Z
can be computed us-
ing the following backward iterative procedure:
ξ(k) = A
(l)
(k + 1)
◦
\ξ(k + 1) ∧ C
(l)
(k )
◦
\z(k),
u
opt
(k ) = B
(l)
(k )
◦
\ξ(k).
5 APPLICATION
5.1 Example 1
This is a generic example because in much industrial
applications (specially in flexible manufacturing sys-
ICINCO 2006 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
82
tems) we find shared resources (as a welding or paint-
ing robot shared between production lines). Output
parts of this stage are processed by the machine M3.
Using Petri nets to model shared resources leads to a
structure of choice represented by a place P (see fig-
ure 2) with an input fork of arcs and another one out-
going. The three machines used M1, M 2, M3 have
one server each, which means that each one treats one
product at once. Processing times on machines M
1
,
M
2
and M
3
are respectively 3, 1 and 3 units of time.
X1
X2
X3
X4
M1
M2
M3
X5
X6
Y
P
Figure 2: Petri net model for example 1.
If l(k) = 1 then u(k) = U
1
(k),
x(k) =
x
1
(k )
x
2
(k )
x
3
(k )
x
4
(k )
=
X1(k )
X3(k )
X5(k )
X6(k )
else
u(k) = U
2
(k),
x(k) =
x
1
(k )
x
2
(k )
x
3
(k )
x
4
(k )
=
X2(k )
X4(k )
X5(k )
X6(k )
.
Considering the first case which means l(k) = 1
we will give how we can extract the state space
equations:
x
1
(k) = 1x
2
(k − 1) ⊕ 1u(k),
x
2
(k) = 3x
1
(k),
x
3
(k) = 2x
2
(k) ⊕ 1x
4
(k − 1),
x
4
(k) = 3x
3
(k),
Y (k) = x
4
(k),
α
(1)
(k ) =
ε ε ε ε
3 ε ε ε
ε 2 ε ε
ε ε 3 ε
,
α
(2)
(k ) =
ε 1 ε ε
ε ε ε ε
ε ε ε 1
ε ε ε ε
,
Table 1: Numerical data and optimal control for system rep-
resented on figure 2.
k 0 1 2 3 4 5 6 7
z(k) 21 22 24 25 29 33 35 39
l(k) 2 1 1 1 2 1 2 2
u
opt
1
(k)
4 8 12 20
u
opt
2
(k)
0 16 24 28
y(k) 11 15 19 23 27 31 35 39
α
(3)
(k ) =
ε ε ε ε
1 ε ε ε
ε 2 ε ε
ε ε 3 ε
,
β
(1)
(k ) =
1
ε
ε
ε
,
β
(2)
(k ) =
3
ε
ε
ε
.
Now using theorem 1, we get:
A
(1)
(k ) = (α
(1)
∗
) ⊗ α
(2)
=
ε 1 ε ε
ε 4 ε ε
ε 6 ε 1
ε 9 ε 4
,
A
(2)
(k ) = (α
(3)
∗
) ⊗ α
(2)
=
ε 1 ε ε
ε 2 ε ε
ε 4 ε 1
ε 7 ε 4
,
B
(1)
(k ) = (α
(1)
∗
) ⊗ β
(1)
=
1
4
6
9
,
in the same way we get: B
(2)
(k) =
3
4
6
9
.
Considering that the switching variable σ(k) is
known on the horizon of study, and consequently l(k)
will be known too, so we can apply the proposed
method for a just in time control. Table 1 shows a
numerical experimentation: z(k) corresponds to the
desired delivery date for the k-th finished piece, l(k)
gives the machine number which treats the k-th part,
u
opt
1
(·) and u
opt
2
(·) are the computed optimal in-
puts, and y(·) is the output response to u
opt
1
(·) and
u
opt
2
(·). We verify that for all k we have y(k)
z(k).
5.2 Example 2
We consider a manufacturing system consisting of
three machines. It is supposed to produce one kind
of piece by assembling two kinds of raw parts de-
noted P
1
and P
2
. Two modes can be chosen along
production. In a first mode, parts P
1
(resp. P
2
)
are preprocessed on machine M
1
(resp. M
2
) and fi-
nally assembled and processed on machine M
3
. In
the second mode, parts P
1
and P
2
are assembled and
preprocessed on machine M
1
, and then processed
successively by machines M
2
and M
3
. Routings
ON JUST IN TIME CONTROL OF SWITCHING MAX-PLUS LINEAR SYSTEMS
83
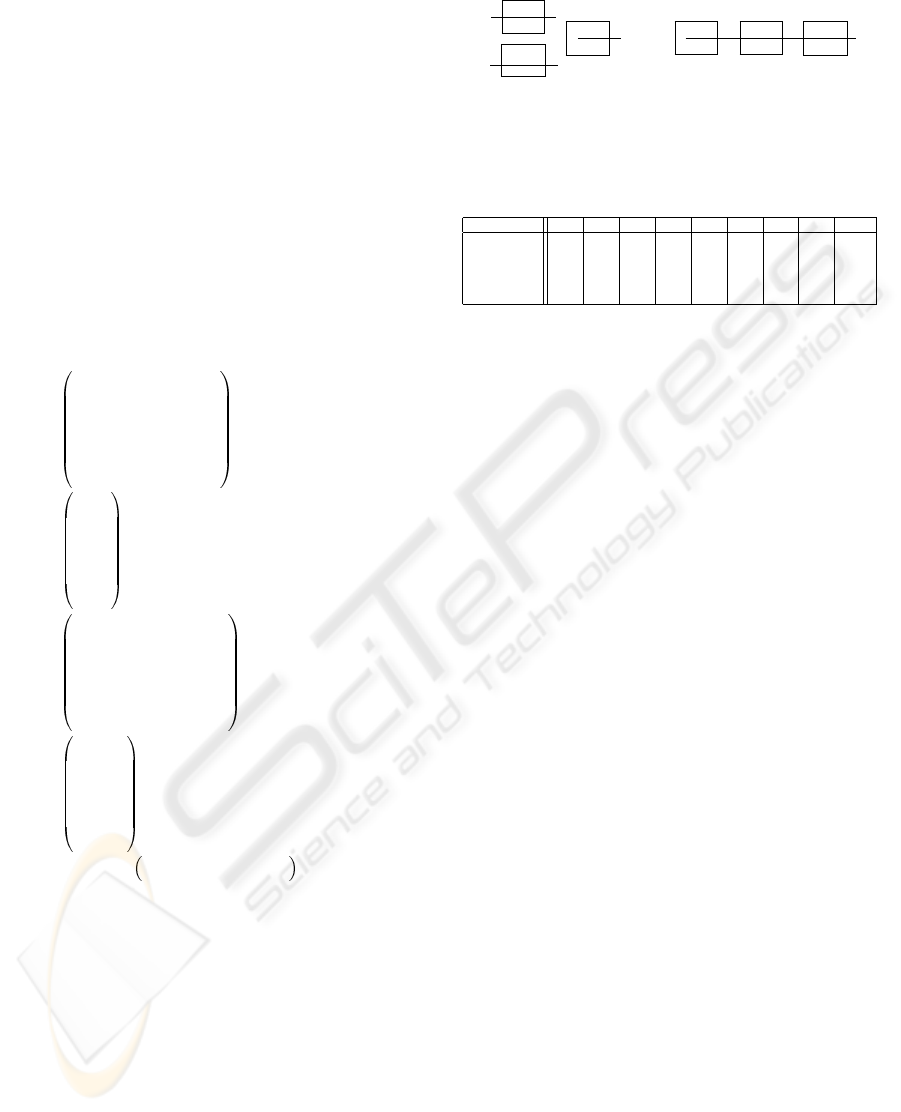
of parts are depicted on figure 3. When a switch
between modes occurs, we assume that semi-finite
pieces preprocessed by machines 1 and 2 (stocked in
their downstream buffers) can be processed indiffer-
ently by downstream machines in the new mode. Fur-
thermore, we assume that there are no set-up-times
on machines when they switch from one mode to an-
other. Processing times on machines M
1
, M
2
and M
3
are respectively 3, 4 and 5 units of time.
Functioning of the system can be represented by
a max-plus linear state equation (2) specific to each
mode. In both modes, we associate two input daters
denoting dates at which raw parts P
1
and P
2
are
released in production. Six state daters are used to
respectively represent input and output dates of parts
on machines M
1
, M
2
and M
3
. Finally, one output
dater denotes delivering dates of finished parts. We
get the following representations:
A
(1)
(k) =
ε 0 ε ε ε ε
ε 3 ε ε ε ε
ε ε ε 0 ε ε
ε ε ε 4 ε ε
ε 3 ε 4 ε 0
ε 8 ε 9 ε 5
,
B
(1)
(k) =
0 ε
3 ε
ε 0
ε 4
3 4
8 9
,
A
(2)
(k) =
ε 0 ε ε ε ε
ε 3 ε ε ε ε
ε 3 ε 0 ε ε
ε 7 ε 4 ε ε
ε 7 ε 4 ε 0
ε 12 ε 9 ε 5
,
B
(2)
(k) =
0 0
3 3
3 3
7 7
7 7
12 12
,
C
(1)
(k) = C
(2)
(k) =
ε ε ε ε ε 0
.
Considering that the switching variable σ(k) is
known on the horizon of study, and consequently l(k)
will be known too, so we can apply the proposed
method for a just in time control. Table 2 shows a
numerical experimentation: z(k) corresponds to the
desired delivery date for the k-th finished piece, l(k)
gives the mode of production chosen for the k-th part,
u
opt
1
(·) and u
opt
2
(·) are the computed optimal in-
puts, and y(·) is the output response to u
opt
1
(·) and
u
opt
2
(·). We verify that ∀k we have y(k) z(k).
@
@
-
X
X
-
Mode 1
Mode 2
P
1
M
1
M
1
P
1
M
3
P
2
M
2
P
2
M
2
M
3
Figure 3: Routings of parts along machines according to
modes of production.
Table 2: Numerical data and optimal control for example 2.
k 0 1 2 3 4 5 6 7 8
z(k) 15 20 35 45 60 75 80 95 100
l(k) 1 1 2 2 2 1 2 1 2
u
opt
1
(k) 7 12 27 37 52 67 72 85 88
u
opt
2
(k)
6 11 26 36 51 66 71 86 88
y(k) 15 20 35 45 60 75 80 95 100
6 CONCLUSION
In this paper we have considered the just in time con-
trol problem of switching max-plus linear systems.
The proposed control is optimal under just in time
criterion in the case where the switching variable is
given on the study horizon. In futur work, we will
consider a different switching variable more general
which is not necessarily given from the beginning.
REFERENCES
Baccelli, F., Cohen, G., Olsder, G.-J., and Quadrat, J.-P.
(1992). Synchronization and Linearity: An Algebra
for Discrete Event Systems. Wiley and Sons.
Blyth, T. and Janowitz, M. (1972). Residuation Theory.
Pergamon press.
Cohen, G., Moller, P., Quadrat, J.-P., and Viot, M. (1989).
Algebraic Tools for the Performance Evaluation of
Discrete Event Systems. IEEE Proceedings: Special
issue on Discrete Event Systems, 77(1):39–58.
Lahaye, S., Boimond, J.-L., and Hardouin, L. (1999). Op-
timal Control of (Min,+) Linear Time-Varying Sys-
tems, Petri Nets and Performance Models. Proceed-
ings of PNPM’99, pages 170–178, Zaragoza, Spain.
Menguy, E., Boimond, J.-L., Hardouin, L., and Ferrier,
J.-L. (2000). Just-In-Time Control of Timed Event
Graphic Update of Reference Input, Presence of Un-
controllable Input. IEEE Trans. on Automatic Control,
45(11):2155–2158.
van den Boom, T. and de Schutter, B. (2004). Mod-
elling and Control of Discrete Event Systems Using
Switching Max-Plus-Linear Systems. In Proceedings
of WODES’04, pages 115–120, Reims, France.
ICINCO 2006 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
84
