
A STUDY ON ASR/TTS SERVER ARCHITECTURE FOR
NETWORK ROBOT SYSTEM
In-Ho Choi
SAMSUNG Electronics Co., Ltd.
416 Maetan-3Dong, Yeongtong-Gu, Suwon-City, Gyeonggi-Do, Korea 443-742
Tae-Hoon Kim
SAMSUNG Electronics Co., Ltd.
416 Maetan-3Dong, Yeongtong-Gu, Suwon-City, Gyeonggi-Do, Korea 443-742
Keywords: URC, Network Robot System, ASR/TTS Server.
Abstract: “The URC (Ubiquitous Robotic Companion, Server computer-based networked robotic)” systems exploiting
Internet-related technologies and Server computer require effective techniques for timely delivery of
requested data to remote clients. In these systems, there is a need to process real-time data in server
computer from/to robots and clients during system operation. In this paper, we describe and evaluate ASR,
TTS server systems in the context of a real-time environment for the URC applications. Experimental
results show that the server-based ASR, TTS support timely delivery of data to a potentially large number of
robots during system operation.
1 INTRODUCTION
Distributed computing systems and Internet-related
technologies have opened new application
perspectives to robot tele-operation systems
(Amoretti, 2003). Examples of novel applications,
often broadly termed as “networked” or “on-line”
robot systems, are tele-teaching/tele-leaming, virtual
laboratories, remote and on-line equipment
maintenance, and projects requiring collaboration
among remote users, experts, and devices (Amoretti,
2003).
The main goal of URC Infra System project is to
develop a high performance server system to process
real-time requests and events from “networked”
home robots connected to the server system via high
speed network. In particular, the server system needs
to provide highly-responsive ASR (Automatic
Speech Recognition) and TTS (Text To Speech)
functionality to the connected robots because the
voice is the most appropriate communication method
for human who wants to communicate with the
robots.
This paper describes the architecture of ASR/TTS
server system in the URC infrastructure and
evaluates experimental results of the implementation
based on the suggested architecture.
This paper is organized as follows: Section 1
presents an overview of the URC Infra system
including its architecture and services; Section 2
outlines the architecture of ASR, TTS servers and
URC Main servers; Section 3 evaluates a
performance of the URC system in terms of
responsiveness of the ASR/TTS server; and Section
4 presents concluding remarks.
1.1 Introduction to URC System
The URC is network robot system providing
ubiquitous services to networked robots based on
client-server architecture. The URC system consists
of client (robot hardware) and server (application
services) components distributed over networks.
The key idea is distributing robot’s intelligence over
remote server computers, which enables low cost
hardware robots to access various application
services running on the servers. It also allows
277
Choi I. and Kim T. (2006).
A STUDY ON ASR/TTS SERVER ARCHITECTURE FOR NETWORK ROBOT SYSTEM.
In Proceedings of the Third International Conference on Informatics in Control, Automation and Robotics, pages 277-282
DOI: 10.5220/0001204702770282
Copyright
c
SciTePress
existing hardware robots to extend their functionality
by connecting to remote servers and making use of
many application services, such as ASR and TTS,
with minimal cost. Conceptually a URC robot is any
terminal device, such as PDAs and cell phones,
which can be accessible to the URC server system
through networks.
1.2 A Structure and Services of URC
Infra System
1.2.1 URC Infra System Structure
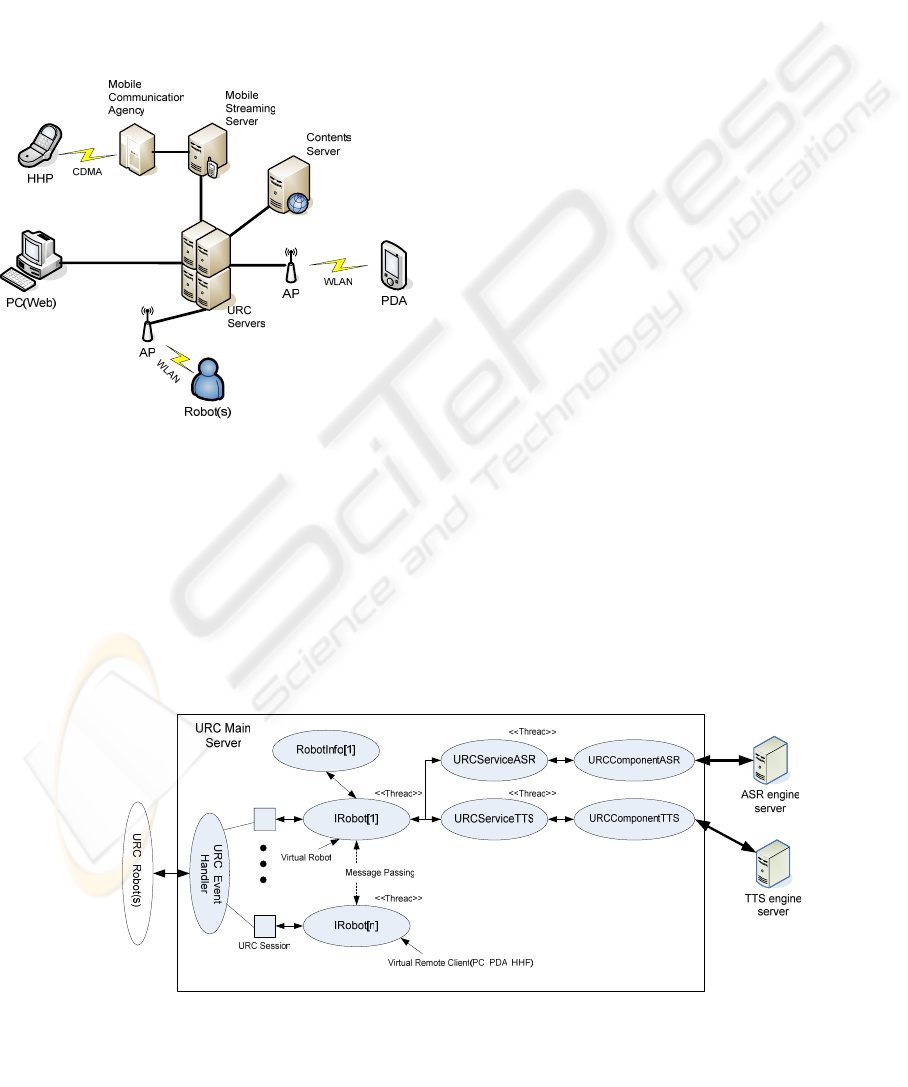
Figure 1: The Structure of URC System.
Figure 1 shows the structure of the URC system.
The URC servers are clustered for high availability
and fast responsiveness based on software-based
clustering technique. A logical URC server cluster
consists of multiple physical servers tied together
with layer 4 load balancing method. The clustered
architecture provides linear scalability of server
performance in proportion to the number of servers
in the cluster. The URC robot connects to the URC
server cluster through wireless LAN and
communicates with each other by following URC
Protocols which includes remote control of the robot,
voice recognition and TTS. The remote user is able
to control and monitor the URC robot remotely by
using remote PCs, PDAs, and cell phones.
1.2.2 URC Infra System Services
There are 3 types of URC services – basic services,
common services, and robot-specific services in the
URC system. The basic service, such as speech
recognition and speech synthesis is provided by the
URC servers to any type of URC robot with the
URC protocol module. It serves as the basic building
block for the various common services, for example,
interactive speech recognition games, unmanned
surveillance, remote monitoring/control of the URC
robots, and so on. The robot-specific service is
application services for particular types of robots
such as cleaning services and robot dancing services.
2 STRUCTURE OF ASR, TTS AND
URC MAIN SERVERS
This section outlines the URC server software
structure with ASR, TTS engine to operate
networked intelligent robot.
Because a standalone robot generally provides its all
functions in 1 machine, there is a hardware limit to
implement high performance functions. It is also
difficult to expect high quality service as compared
against cost. Application software such as speech
recognition and synthesis which requires a lot of
hardware resources is especially main factor to
increase the cost of robot. As mentioned in section 1,
the URC can realize to simplify robot functions
about application software which provides a service
that requires high performance as well as ASR, TTS
Figure 2: URC Software Architecture with ASR, TTS Servers.
ICINCO 2006 - ROBOTICS AND AUTOMATION
278

as it uses server-based computing through network
with high speed and bandwidth. It can likewise
realize the low cost of robot by reduced computing
power and to increase availability through
providing unlimited services. Therefore, as ASR and
TTS engine using many resources of robot execute
in the URC system to serve user speech recognition
and synthesis, it is possible to support unlimited lists
of recognition words and speech synthesis for many
languages.
Figure 2 shows the block diagram of URC Main
server which is in charge of an interface between
URC Robot and ASR/TTS engine servers. ASR/TTS
engine can be constructed a separate server or not.
3 PERFORMANCE EVALUATION
OF URC SYSTEM WITH ASR,
TTS SERVER
This section describes a test environment, scenario
and results for evaluating performance about server-
based ASR/TTS system. The URC server system for
ubiquitous robot satisfies requirements for real-time
as follows:
(1) [Requirement 1] Average response time less than
1 second for request message of clients and/or robots.
(2) [Requirement 2] Providing sessions (clients +
robots) more than minimum 100 per 1 server.
Above-mentioned conditions are minimum
requirements to actually apply URC system to fields
(home).
3.1 Experimental Environment and
Scenario
An experimental scenario divides 2 cases according
to the location of ASR and TTS engine servers.
(1) [Scenario 1] The ASR/TTS engine servers are
located in local machine with the URC Main
software.
(2) [Scenario 2] The ASR/TTS engine servers are
separated to external server from machine with the
URC Main software through network.
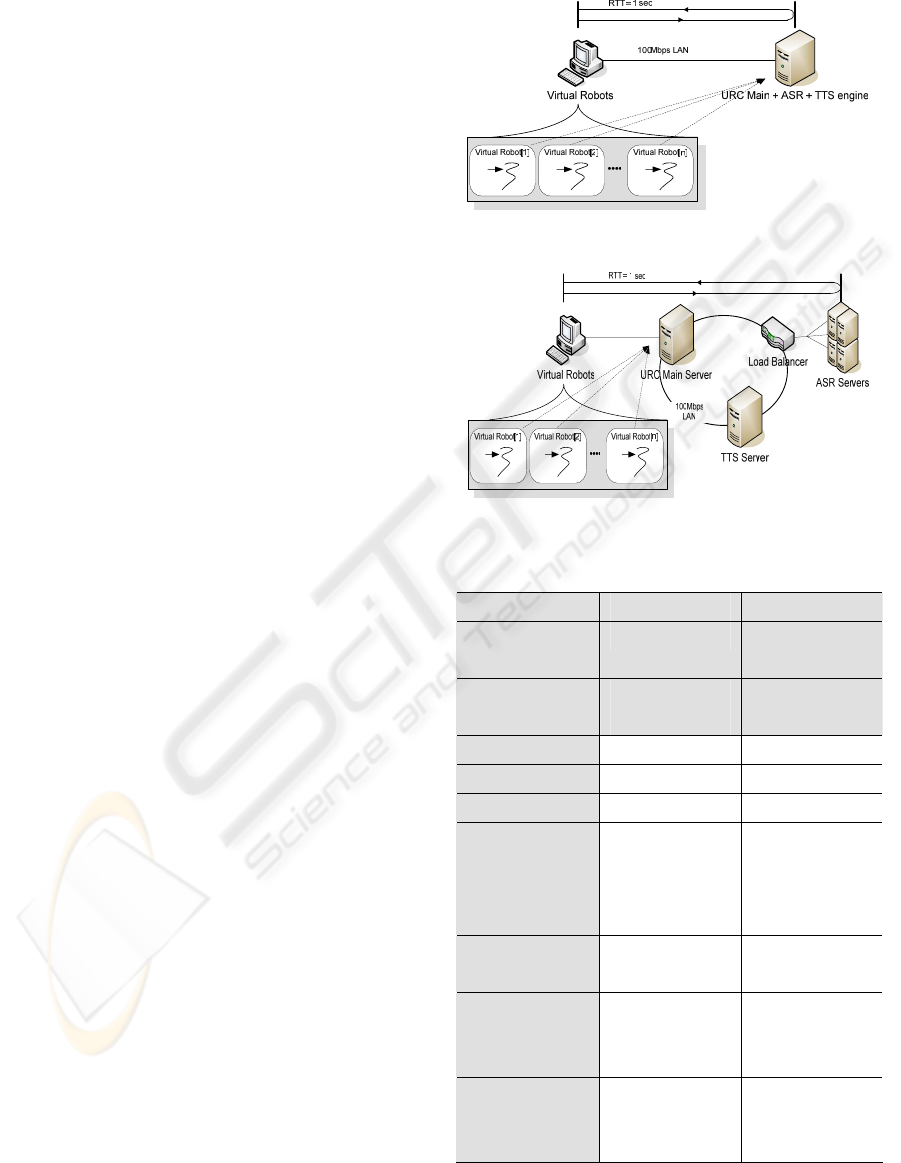
Figure 3 and 4 show the structure of the URC
system model for [Scenario 1 and 2].
In the figure 3 and 4, URC Man server, ASR/TTS
servers and virtual robots have IP addresses in the
same subnet. We regarded 1 transaction time until
receiving a corresponding response message after
the virtual robot sends a request message to the URC
Main server as RTT (Round-Trip Time). The
[Requirement 1] means that it satisfies average RTT
≤ 1.
A hardware specification of URC Main server, ASR
and TTS server, operating system and software
specification for each [Scenario] is listed in Table 1.
Table 1: Specification of Servers (URC Main, ASR, TTS).
URC Main
Server
ASR
Server
TTS
Server
Hardware
specification
CPU : Intel® Xeon™ Processor 3.2
GHz/1M, EM64T, 800MHz FSB * 2EA
Memory : 4GB, DDR-2 400MHz ECC
HDD : 146GB Ultra320 SCSI
LAN : 100Mbps
Operating
System
Redhat Enterprise Linux AS(kernel 2.4.21-
4.ELsmp)
etc 9 ASR engine : HCILab[5] ASR software
(Korean version, Independent Speaker,
10,000 words support)
9 TTS engine : HCILab[5] TTS software
(Korean version)
We constructed a test scenario to verify whether
URC system model for [Scenario 1 and 2] satisfies
[Requirement 1 and 2] or not. Figure 5 shows a
sequential diagram for test scenarios. However, all
case of [Scenario 1] except “URC Main server”,
“ASR server” and “TTS server” are operated in 1
machine is identical.
1. Robots over 100 are connected to the URC Main
server. The robot to be established the connection is
completed an authentication step from the URC
Main server.
2. Each robot receives a speech input, “What is the
URC?” from user and transmits it to the URC Main
server after the robot converts to WAV file.
3. The URC Main server receives the WAV file and
transfers to an ASR server to request speech
recognition.
4. The ASR server sends a text (string), symbol and
score to the URC Main server as result after he
processes speech recognition.
5. The URC Main server decides a response string
to have to transmit with the recognized result.
6. The URC Main server transfers the response
string to TTS server to convert speech output, which
is WAV file, “I’m going to tell you about the URC.”
7. The URC Main server is obtained a response
WAV file by TTS server and then transfers the
robot.
A STUDY ON ASR/TTS SERVER ARCHITECTURE FOR NETWORK ROBOT SYSTEM
279
Since we couldn’t implement 100 physical robots
for experiments, we constructed virtual robots
corresponding to physical robot and execute them in
1 PC machine. We used “QALoad” Software which
is an application load testing program of
Compuware Corporation to achieve virtual robots.
The test script of QALoad transmits a request WAV
file, “What is the URC?” to the URC Main server
after it generates more that 100 robots. It
subsequently waits for a corresponding response
WAV file during 60 seconds. If it can’t be received
the response within 60 seconds, it regards error. The
test script of QALoad records whether an average
RTT, that is a time for 1 transaction until the receipt
of the response WAV file, completes less than 1
second or not. We executed the transaction of 20
times for average RTT to increase accuracy of test.
Then, we estimated an average response time,
maximum delay response time and standard
deviation.
A timing diagram about 1 transaction of a robot in
test environment is shown in Figure 6. After virtual
robot has established the session to URC server and
completed authentication step, transaction begins
(B.T). A single transaction includes a request
message (S.R), “What is the URC?” and a response
message (R.R), “I’m going to tell you about the
URC.” After the transaction has started (B.T), there
is a “Sleep time” which is a random time in the
range of 0~20 seconds and then the request message
(S.R) is sent to URC server. This is to apply random
distribution to message generation model of the
virtual robot. After the transaction has terminated
(E.T), there is a “Pacing time” before a next
transaction is started. The “Pacing time” is minimum
interval time to prevent excessive ASR request
messages to halt the ASR server system by overload.
The next transaction will be followed after “Pacing
time” is completed.
The test environment and related parameters as
stated above are listed in Table 2.
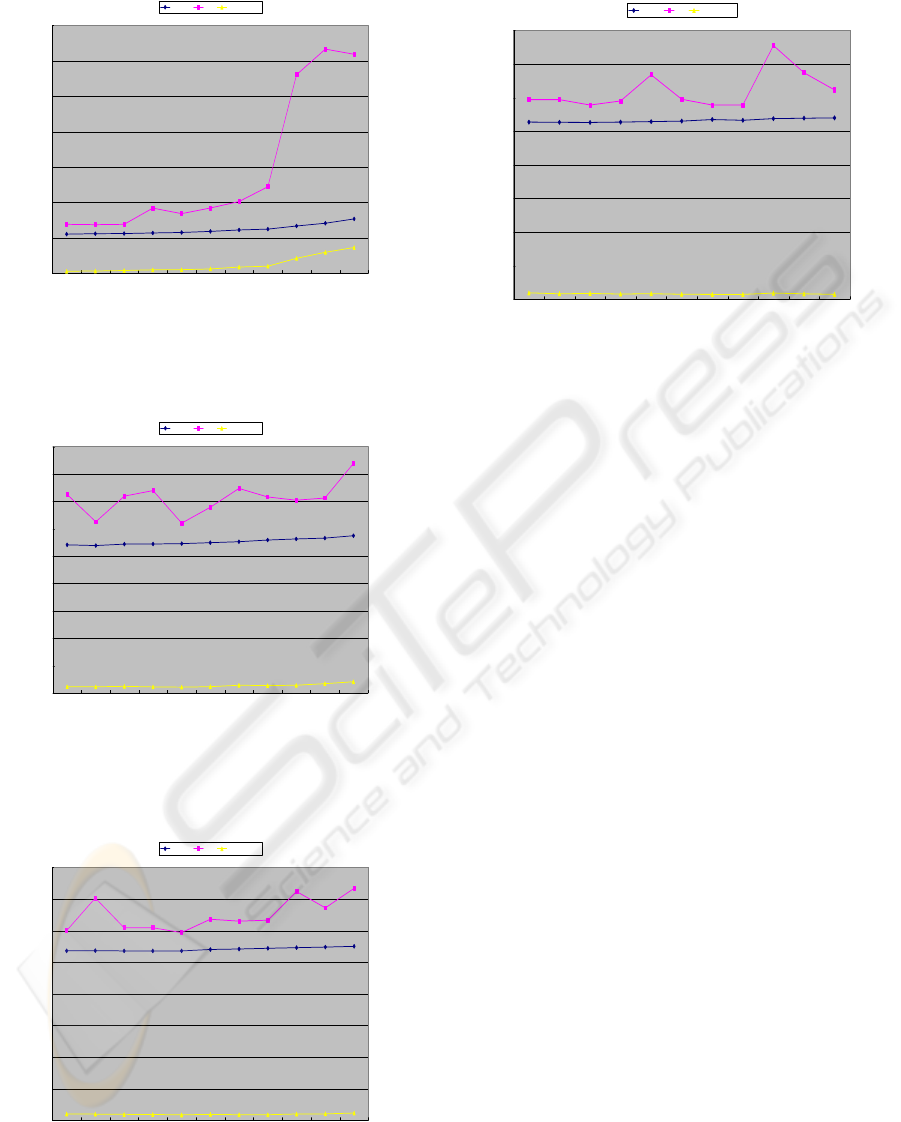
3.2 The Results of Experimental
Performance for Scenario 1
Figure 7 shows the results of average response time,
maximum delay response time and standard
deviation about [Scenario 1]. We estimated variation
of response time while the numbers of virtual robot
increases from 50 to 130. As shown in the result,
[Scenario 1] only satisfies [Requirement 1], which is
average response time within 1 second in case of
about 70 virtual robots. However, maximum delay
response in case of 50 virtual robots as well as the
response time with standard deviation in case of 70
virtual robots exceeds 1 second.
Figure 3: URC system model for [Scenario 1].
Figure 4: URC system model for [Scenario 2].
Table 2: Summary of Test Parameter.
Parameter Value Remark
Requirement #1 RTT < 1sec For 1
transaction
Requirement #2 [# of robots ≥
100] / 1 server
-
number of robots From 100 to 200 Increase 10 robots
Total transaction 20 times -
LAN 100Mbps
Request message
start time interval
random Sleep Between 0
and 20 sec after
begin-transaction
start
Pacing time
interval
20 sec Sleep between
transaction
Request message
length
20404bytes URC Protocol
header with 20
bytes included
Response message
length
46304bytes URC Protocol
header with 18
bytes included
ICINCO 2006 - ROBOTICS AND AUTOMATION
280

Figure 5: The Sequential Diagram of Test Scenario.
3.3 The Results of Experimental
Performance for Scenario 2
The URC Main, ASR and TTS software at the result
in section 3.2 make use of maximum 2%, 25% and
4% CPU resource respectively. An experimental
result in Figure 7 shows that there is a bottleneck in
the process of request for speech recognition in
single ASR server. Therefore, we executed the URC
Main and TTS on each machine such as Figure 4
and modified for ASR to be consisted of multiple
server machines with clustering service through a
load balancing algorithm. The load balancing
algorithm used in this research is Least Connection
Scheduling.
Figure 8~11 show the results of the average
response time, maximum delay response time and
standard deviation of [Scenario 2] according to
changing clustered ASR server to 2~5 machines.
The results in Figure 8~11 describe that minimum 3
ASR servers are needed to stably meet [Requirement
1 and 2].
4 CONCLUSION
The ASR and TTS services play important roles in
communication between human and intelligent
service robots. Since these services require a lot of
system resources, running ASR/TTS services in a
networked remote server is able to provide high-
Figure 6: Timing Diagram for 1 Virtual Robot.
Performance Result for Scenario1
[
Local Machine
]
0
5
10
15
20
25
30
35
50 60 70 80 90 100 110 120 130
Virtual Robots
Seconds
A
vera
g
e Max Std. deviation
Figure 7: Experimental Performance Result for Scenario 1.
quality HRI (Human Robot Interaction) services to
users with minimal cost.
In this paper, we present a practical way of
distributing CPU-intensive tasks like ASR/TTS
services over high performance network servers
connected through high speed network. We
identified that the ASR service is performance
bottleneck and present appropriate server
architecture for ASR/TTS services based on server
clustering technology. The architecture presented in
this paper includes load balancing algorithm that
distributes incoming requests from remote robots
over multiple servers efficiently, and we could
validate the suggested architecture is able to ensure
reasonable response time for 100 network robots by
experimental performance tests.
Although the result presented in this paper is
obtained in 100 Mbps LAN environments, it can be
meaningful basis for performance model for WLAN
environments with lower network bandwidth. The
relevant ongoing research includes the
implementation and analysis of experimental
performance models in WLAN environments.
A STUDY ON ASR/TTS SERVER ARCHITECTURE FOR NETWORK ROBOT SYSTEM
281
Perform anc e Result for Scenario2
[
2 ASR Servers
]
0
0.5
1
1.5
2
2.5
3
3.5
50 60 70 80 90 100 110 120 130 140 150
Virtual Robots
Seconds
A
vera
g
e Max Std.deviation
Figure 8: Experimental Performance Result for Scenario
2[2 ASR Servers].
Performance Result for Scenario2
[
3 ASR Servers
]
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
50 60 70 80 90 100 110 120 130 140 150
Virtual Robots
Seconds
A
vera
g
e Max Std.deviation
Figure 9: Experimental Performance Result for Scenario
2[3 ASR Servers].
Perform ance Result for Scenario2
[
4 ASR Servers
]
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
50 60 70 80 90 100 110 120 130 140 150
Virtual Robots
Seconds
A
vera
g
e Ma x Std.deviation
Figure 10: Experimental Performance Result for Scenario
2[4 ASR Servers].
Performance Result for Scenario2
[
5 ASR Servers
]
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
50 60 70 80 90 100 110 120 130 140 150
Virtual Robots
Seconds
A
vera
g
e Max Std.deviation
Figure 11: Experimental Performance Result for Scenario
2[5 ASR Servers].
REFERENCES
Michele Amoretti, Stefano Bottazzi, Monica Reggiani,
Stefano Caselli, “Evaluation of Data Distribution
Techniques in a CORBA-based Telerobotic System”,
Proceedings of the 2003 IEEE/RSJ Intl. Conference on
Intelligent Robots and Systems, October
2003.pp.1100-1105
Douglas C. Schmidt, Stephen D. Huston, 2002. The book,
Addison-Wesley. C++ Network Programming:
Mastering Complexity Using ACE and Patterns.
Douglas C. Schmidt, Stephen D. Huston, 2003. The book,
Addison-Wesley. C++ Network Programming:
Systematic Reuse with ACE and Frameworks,
Stephen D. Huston, James CE Johnson, Umar Syyid, 2004.
The book, Addison-Wesley. The ACE Programmer's
Guide: Practical Design Patterns for Network and
Systems Programming.
The library of ASR/TTS engine. HCI Lab company.
http://www.hcilab.co.kr/
ICINCO 2006 - ROBOTICS AND AUTOMATION
282
