
HYBRID IMPEDANCE CONTROL FOR MULTI-SEGMENTED
INSPECTION ROBOT Kairo-II
C. Birkenhofer, S. Studer, J. M. Z
¨
ollner, R. Dillmann
Forschungszentrum Informatik (FZI)
Haid-und-Neu-Str. 10-14, 76131 Karlsruhe, Germany
Keywords:
Hybrid Impedance Control, Multi-Segmented Robot, Force Feedback, Dynamic Modeling.
Abstract:
The tremendous redundancy of the multi-segmented robot Kairo-II can be utilized to enhance general robot
configuration by any inspection task. To do so, an extensive control scheme must be installed which can handle
both, contact scenarios with the environment and ambiguous robot configurations. A method for implementing
an appropriate scheme using Transposed Jacobians based on Hybrid Impedance Control (TJ-HIC) is described
and validated for multi-segmented robots. Crucial parts of this model are identified and implemented. These
are dynamic modeling of the robot in Recursive Newton-Euler equations (RNE) and a sensory system for
apropriate force feedback information.
1 INTRODUCTION
Hyper-redundant systems offer great opportunity and
present great challenges for control tasks. Trajec-
tory planning, hybrid position and force control and
handling redundancy require extensive control tech-
niques. The multi-segmented robot Kairo-II is a
hyper-redundant system. Its expanse, load capacity
and kinematic abilities make it appropriate for inspec-
tion operations in unstructured environments.
We term the end-effector of the robot ”configurable”
as different segments of the robot fulfil characteristics
of the end-effector. According to serial kinematics
both head- and tail-segment of Kairo-II (Figure 1) can
be interpreted as end-effector of an open kinematic
chain, depending on the driving direction, with head
and tail segments as the robot base, respectively. The
redundancy of the system furthermore can be used
to position inspection segments within the kinematic
chain. In this case head and tail segment represent the
base of the robot. This process can be defined as an
additional user-defined task. The kinematic chain of
the system gets closed and gives rise to a major con-
straint for any control strategy arises.
Such movement offers greater opportunity for inspec-
tion tasks, but calls for complex control strategies.
Deadlocks have to be detected and resolved in a ap-
propriate way. Fundamental methods for manipulator
control can be used.
The paper is organized as follows. First, the con-
Figure 1: Multi-segmented inspection robot MAKRO-
plus (similar in construction to Kairo-II). A typical robot
configuration consists of 6 drive segments and 5 joint seg-
ments.
trol architecture of the Kairo-II robot is presented in
section 2. Crucial blocks of the control loop are here
identified. Section 3 presents fundamentals of the dy-
namic model of the robot. This model is essential for
simulating the control loop. The sensory system for
217
Birkenhofer C., Studer S., M. Zöllner J. and Dillmann R. (2006).
HYBRID IMPEDANCE CONTROL FOR MULTI-SEGMENTED INSPECTION ROBOT Kairo-II.
In Proceedings of the Third International Conference on Informatics in Control, Automation and Robotics, pages 217-222
DOI: 10.5220/0001207602170222
Copyright
c
SciTePress

force detection is presented in section 4. Finally, sys-
tem integration and experimental results are analyzed
in detail in section 5. Summary and future work are
addressed in section 6.
2 CONTROL ARCHITECTURE
2.1 Transpose Jacobian based
Hybrid Impedance Control
In performing inspection tasks, a robot usually inter-
acts with the surrounding environment. Position con-
trolled methods can not fulfil demands of such an op-
eration. In fact simultaneous control of position and
force is necessary. Numerous basic strategies exist
(Salisbury, 1980), (Hogan, 1985) and (Khatib, 1987).
In the field of redundant systems those strategies have
to be enhanced for two reasons:
• Ambiguity of coordinate transformations have to
be handled.
• Decomposition of redundancy is usually managed
by velocity controlled systems. Such systems tend
to proper motion.
For these reasons, Hybrid Impedance Control, based
on Transposed Jacobian (Shah and Patel, 2005) was
chosen in the presented work. Main advantages of the
control scheme are:
• The control algorithm is defined in the working
space of the system.
• Accurate knowledge of the robot’s dynamic is not
necessary.
• Any higher instance for controlling the system can
be integrated.
In terms of controlling a user-defined task as de-
scribed in section 1 the essential requirements are ful-
filled. Structure and crucial components of the con-
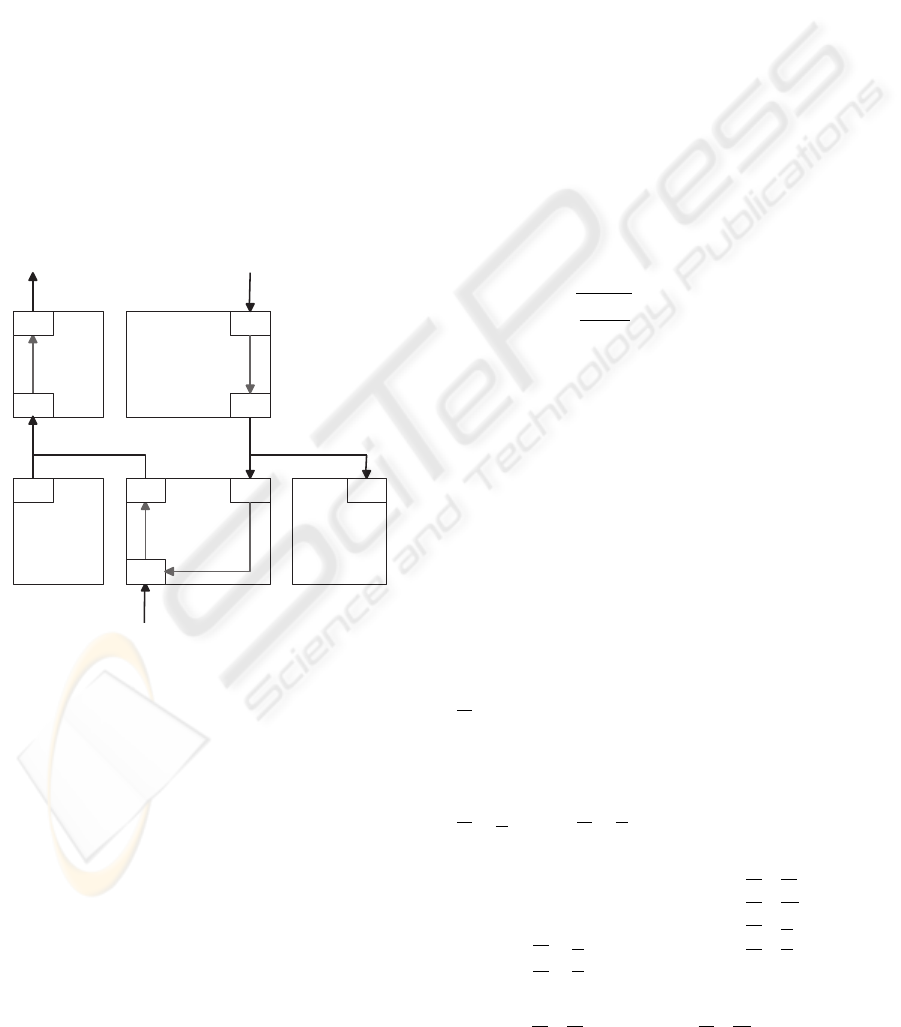
trol scheme are depicted in Figure 2. The control loop
consists of an inner and an outer loop. While the outer
loop generates desired cartesian acceleration trajec-
tories, the inner loop controls needed motor torques
directly. Redundancy of the system and possible sub-
tasks are both handled in the inner loop.
Several blocks of the control loop have decisive char-
acter in hybrid force and motion control of the multi-
segmented robot Kairo-II. Their impact on the control
scheme is presented below.
2.2 Trajectory Generation
Generation of the robot’s trajectory is equivalent to
a transformation of a low-dimensional vector to a
HIC
Trajectory
Generation
Integrator
Potential
Function
Forward
Kinematics
Robot
G(q)
Jacobian
Kd
Outer Loop
Inner Loop
F
e
F
e
τ
Z
d
X
r
Y
d
=
[ ]
Y=
[ ]
X
Z
X
r
Z
d
X
d
Figure 2: Transpose Jacobian based Hybrid Impedance
Control, (X
d
: Vector of the desired trajectory, X
r
: Vec-
tor of the reference position trajectory, Z
d
: Vector of the
desired sub-task, Y
d
: Vector of desired task requirements,
F
e
: contact force with the environment).
higher one. In taking redundancy into account a sim-
ple (low-dimensional) primary task shall be gener-
ated.
Kairo-II posesses tremendous kinematic abilities.
Since this is a hyper-redundant system, tasks can be
enhanced by addition of aspects (i.e. placing a sen-
sory module) in the process of the trajectory genera-
tion. Generation of the robot’s path will be processed
according to the virtual line / curve algorithm (Scholl
et al., 2000). This master-slave method is simple, ro-
bust and efficient. By using this method the high-
dimensional input vector gets reduced to a lower di-
mensoinal one, as only the head-segment has to be
taken into account when generating a trajectory. In
contrast to other methods (i. e. (Choset and Henning,
1999)), the mechanical constraints of the robot are
taken into account in the trajectory generation phase.
The generated trajectory is therefor driveable for the
robot.
When the environment the robot is driving becomes
increasingly complex and unstructured, an adapta-
tion towards the virtual tube algorithm (Birkenhofer
et al., 2005) is desirable. Trajectory generation will
then work in a higher-dimensional space. Not only
the head-segment but segments essential for the addi-
tional sub-tasks are taken into account.At this stage,
trajectory generation will be kept at a basic level to
demonstrate the control loop’s working principle.
2.3 Potential Function
As part of the inner control loop, the potential func-
tion acts as a quality factor for desired movements.
Aspects of optimization are taken into account to deal
with the redundancy of the system. There are several
criterea possible.
• Gravity keeps the components of the robot on the
ground
• Minimize absolute value of all joint amplitudes
• Move inspection module to a desired position,
adapt and keep the robot in a steady state.
ICINCO 2006 - ROBOTICS AND AUTOMATION
218
Currently, a criterion that minimizes movements of
all joints is adequate. Steady state considerations will
follow.
2.4 Dynamic Modeling
The quality of dynamic modeling of Kairo-II has a
large impact on the system’s performance (in contrast
to general TJ-HIC-applications) for two reasons:
First, good simulation of the robot is important in the
early design phase of Kairo-II. (I.e. The model’s ac-
curacy has an impact on evaluating force feedback
sensor system.)
Second, the use of the robot within a closed loop re-
quires knowledge of the robot’s dynamics for inverse
dynamic and kinematics calculations. (I.e. Posture
control of the robot has to be evaluated with regard
to the robot’s steady state when a user-defined addi-
tional task is processed.) The module for dynamic
modelling is integrated in the work flow as depicted
in Figure 3.
SO
SI
CI
SI
CO
CI
CI
SO
SO
Data
Fusion
Force Feedback
-
section 4
Inverse Dynamics
(RNE-model)
-
section 3
Robot
Kairo-II
Direct
Dynamics
τ
F
e
F
sense
F
model
f, n
q, q’, q’’
Figure 3: Work flow of the dynamic modeling and the force
feedback sensor system as implemented in MCA2.3 (Scholl
et al., 2001).
2.5 Force Feedback
When Kairo-II is in motion, we receive sensor val-
ues stating the current forces and moments within the
robot. This is a result of the motion of the robot and its
contact with the environment. At the same time, the
dynamic model calculates forces and moments result-
ing from the sheer robot motion not considering con-
tact with the environment. In merging sensor values
with model values, we are able to calculate the exter-
nal forces that act on the robot, Therefore, we assume
adequate accuracy of the sensor system and the robot
model. A sensor system based on strain gauge tech-
nology is therefore integrated in the module ”Force
Feedback” (see Figure 3).
3 DYNAMIC MODELING
For the successful implementation of the proposed
control scheme it is of great importance to design an
appropriate dynamic model of Kairo-II. There exist
various approaches to describe the dynamics of rigid
multi-body systems. Most of them face two common
problems: It’s hard to define the parameters and the
computational complexity exceeds the capacity of a
mobile system.
A modeling method that is quite efficient is the Recur-
sive Newton-Euler equation (RNE) (Fu et al., 1987).
In considering each robot link (rigid part between two
joints) separately, forces and moments that apply to it
can be calculated recursively. The two well-known
physical laws can be used. We apply them to rotating
coordinate systems:
F
i
=
d(m
i
v
i
)
dt
= m
i
a
i
N
i
=
d(I
i
ω
i
)
dt
= I
i
˙ω
i
+ ω
i
× (I
i
ω
i
)
(1)
with force F, mass m, velocity v, acceleration a, mo-
ment N, inertia I and angular velocity ω of the i-th
link.
The formulation results in two sets of recursive equa-
tions: The forward equations propagate kinematics
information such as angular velocity, angular accel-
eration and linear accelerations from the head of the
robot to the tail. The backward equations propagate
the forces and moments exerted on each link from the
tail to the head.
To make the algorithm computationally more effi-
cient, all values are referenced to the local coor-
dinate system of the corresponding joints instead
of computing them to the coordinate system of the
head. This is demonstrated by multiplying the values
with the appropriate 3 × 3 rotating matrices, where
R
i−1,i
transforms any vector with reference to co-
ordinate system (x
i
, y
i
, z
i
) to the coordinate system
(x
i−1
, y
i−1
, z
i−1
).
Inputs of the model are the current joint positions q
i
,
joint velocities ˙q
i
and joint accelerations ¨q
i
, while
R
n,0
f
n+1
and R
n,0
n
n+1
are the forces and moments
exerted by link n upon the environment.
q
i
˙q
i
¨q
i
R
n,0
f
n+1
R
n,0
n
n+1
RNE
=⇒
R
i,0
F
i
R
i,0
N
i
R
i,0
f
i
R
i,0
n
i
τ
i
(2)
(With i = 1 . . . n). The model outputs the total exter-
nal force R
i,0
F
i
and moment R
i,0
N
i
exerted on link
HYBRID IMPEDANCE CONTROL FOR MULTI-SEGMENTED INSPECTION ROBOT Kairo-II
219

COM
COM
R
i,0
N
i
R
i-3,0
N
i-3
R
i-3,0
F
i-3
R
i-3,0
n
i-3
R
i,0
F
i
R
i,0
n
i
R
i,0
f
i
R
i-3,0
f
i-3
link i
link i-3
x
j
y
j
z
j
x
j-1
y
j-1
z
j-1
x
i-4
y
i-4
z
i-4
x
i-1
y
i-1
z
i-1
J
i-3
J
i-4
J
i-5
J
i
J
i-1
J
i-2
Figure 4: Simplified dynamic model of Kairo-II.
i at the center of mass (COM) for the links i = 1 . . . n.
Furthermore it returns the forces R
i,0
f
i
and moments
R
i,0
n
i
exerted on link i by link i − 1 at the position
of joint i and the input force/torque τ
i
for joint i.
Each link is specified by a set of 14 parameters, which
describe the kinematics of the link, its mass and its in-
ertia. So, to describe the robot Kairo-II in its standard
configuration with 6 segments and 15 joints, more
than 200 parameters would have to be defined. Fur-
thermore, the values of inertia have to be determined
for each of them.
3.1 Simplified Dynamic Modeling
To avoid the problem of complexity, a simplified
model of the robot is presented. As two segments of
Kairo-II are linked by three joints, we would have to
define 3 · 14 = 42 parameters. We replace the three
real joints by three virtual joints (J
i
, J
i−1
, J
i−2
), that
are centred at one point just in between two segments
(see Figure 4). The joint’s coordinate systems have
the same origin, and their axes of rotation form an or-
thogonal coordinate system.
In this way the links i−1 and i−2 are zero-links with
mass, inertia and displacement vectors all being zero.
As a result the number of parameters to determine de-
creases from 42 to 20.
This also reduces the enormous number of output val-
ues of our model. With the reduced model all out-
put forces/moments are located either at the center of
mass of the segments or at the location of the virtual
joints which simplifies the interpretation of the values
and the integration into the control scheme.
4 SENSOR SYSTEM
The TJ-HIC control scheme needs information about
forces and moments arising within the real robot. By
fusing this sensor information with data from the dy-
namic model, differential data can be obtained. F
e
=
F
model
− F
sense
. With F
e
as differential force af-
ter the robot’s contact with the environment. In mini-
mizing F
e
a movement close to the desired movement
generated by the trajectory planner is achieved.
In installing a sensor system for force feedback, major
effort has to be put into the sensor’s position. Accord-
ing to Figure 4 the sensor’s coordinate systems should
match to the dynamic modeling systems. Therefore, a
sensor system is presented that is able to detect forces
and moments in the model’s coordinate systems.
Three sensor applications fulfil these requirements.
They provide information on arising forces and mo-
ments along the axes of the dynamic model or can be
at least transformed easily.
Rotation around x-axis Implicit torque measure-
ment within rotational gears
Forces along y-, z-axis Explicit torque measurement
within mechanic components (flange plate)
Forces along x-axis Explicit torque measurement by
analyzing drive segment motor currents
The biggest impact on constraint motion is provided
by explicit torque measurement along y- and z-axis.
As a result of this, sensory feedback virtual tube can
be adapted to minimize torsions that affect the ma-
nipulator. Gathering this sensory information is de-
scribed in the next sections. Measuring torques and
forces along the x-axis is not covered in this paper.
4.1 Architecture
For a typical robot configuration of 6 drive segments
and 5 joint segments and well-known masses of the
components, a detection of arising torques of about
25 N m to 200 Nm is desirable to be detected. By
making this information available, adaptation of the
virtual tube is possible. The linear structure of the
robot, minding the law of the levers, prefers torques
to forces for analysis. Torques in direction of y- and
z-axes are to be measured. Any combination of those
vectors is valid.
Analyses in (Birkenhofer et al., 2004) have proven
that force and torque primarily affect the flange plate.
Deformations resulting of affecting forces are here to
be measured best. The presented sensor system meets
requested accuracy. It is based on strain gauge tech-
nology.
To detect the direction of affecting moments non-
ambiguously, a sensor array is necessary. Three pairs
of sensors with an angular distance of 60 degree are
installed. Therefore, six pairs of strain gauges are ap-
plied. Opposing strain-gauges in each case make up a
full measuring bridge, providing optimal temperature
compensation. The positions of the single sensors are
named w
1+/−
, w
2+/−
, w
3+/−
. Thereby, three sensor
signals are derived: w
1..3
.
According to the general strain-gauges equation
∆R
R
0
=
∆U
U
0
= k.
∆l
l
0
(3)
ICINCO 2006 - ROBOTICS AND AUTOMATION
220
maximal sensor resolution (i.e. minimal detectable
elongation δl) can be achieved by optimizing three
sets of parameters:
• Enhancing circuits voltage U respectively resis-
tance R.
• Scaling down factor k, which is subject to material
properties.
• Minimizing SNR of the sensors circuitry.
While items 1 and 2 underlie mechanical constraints,
major work has been put into SNR reduction of the
electrical circuitry, sensor’s cabling and sensor’s fix-
ing. As a result an amplification factor of k = 5826
results in a signal’s amplitude of about 4000 LBS
(with noise in a range of 500 LSB).
-4000
-3000
-2000
-1000
0
1000
2000
3000
4000
0 90 180 270 360 450 540 630 720 810 900 990 1080
-4000
-3000
-2000
-1000
0
1000
2000
3000
4000
degrees
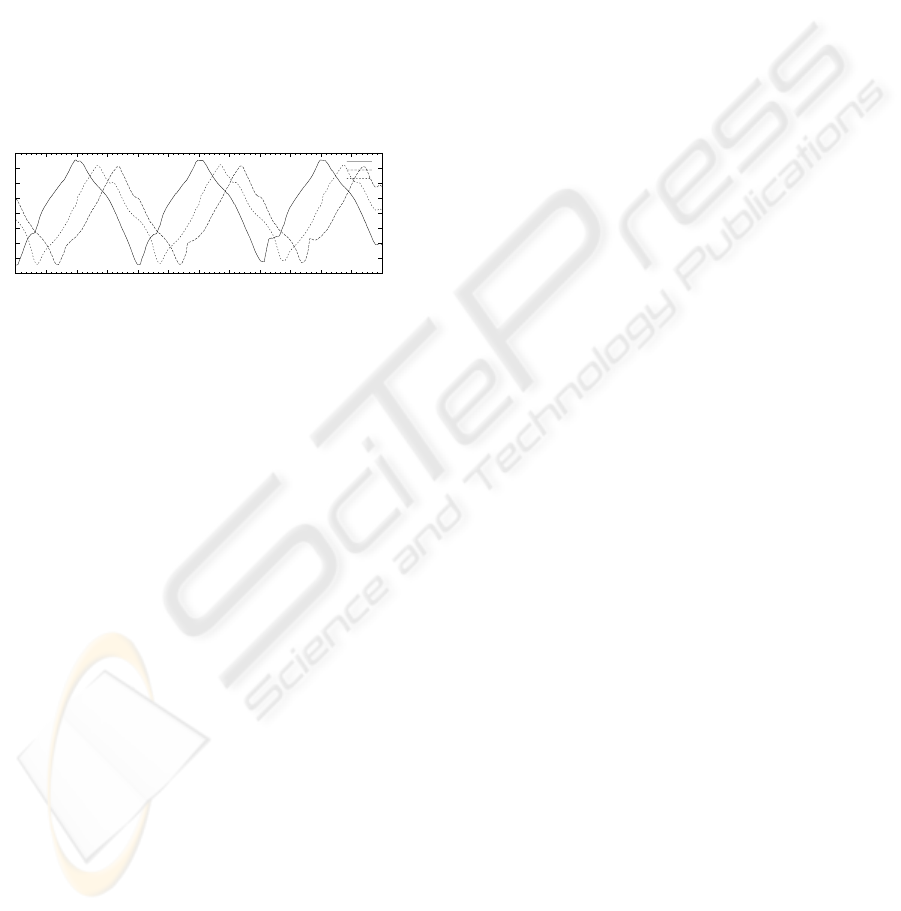
Strain Data (DS
5
;CYCLE
auto
)
w
1
w
2
w
3
Figure 5: A constant load that is rotating around the flange
plate causes alternating amplitutes of sensor signals w
1..3
.
(x-axis: angle in deg, y-axis: sensor value in LSB).
As seen in Figure 5 angular detection of applying
forces are possible. The sensor meets the control
scheme’s demands.
4.2 Signal Optimization
Three primary factors affect sensory accuracy and
therefore reduce measurement reading interpretation
respectively:
Hysteresis Measured magnitude is at a maximum of
about ±1 µm/m strain
Long-term drift is in a range of about ±1.25 µm/m
strain
Temperature compensation’s residual error is
compensated by a linear approach. An auto-fit
algorithm is used, to minimize the error signal q
i
.
q
i
=
(
w
i
(j) −
h
o
i
+ p
i
· T (j)
i
; ∀j
)
(4)
With j as a single tuple in the data series, w
i
(j)
as current strain value and T (j) as the according
temperature. The algorithm optimizes q
i
by min-
imizing the least square error e(p
i
, o
i
) iteratively.
The algorithm will be aborted after five iterations,
as the auto-fitting process results then in a remain-
ing residual error in a range of ±50 counted mea-
surands for the falling branch of temperature. This
equals to ±0.25 µm/m, which is close to the de-
sired sensor resolution.
In order to apply torques to the flange plate’s deforma-
tion, the direct sensor model maps three sensor signals
[w
1
, w
2
, w
3
] to moments [M
y
, M
z
] according to axes
y,z of the flange plate coordinate system. A calibra-
tion will determine a set of model parameters C for
a provided set of calibration data, comprising l data
tuples [M
y
, M
z
, w
1
, w
2
, w
3
]
λ
; 1 ≤ λ ≤ l.
Therefore, we need some approximation with coeffi-
cients c
ij
∈ C:
M
λ
y
≈ c
1,0
+c
1,1
w
λ
1
+c
1,2
w
λ
2
+..+c
1,7
w
λ
1
w
λ
1
.. (5)
M
λ
z
≈ c
2,0
+c
2,1
w
λ
1
+c
2,2
w
λ
2
+..+c
2,7
w
λ
1
w
λ
1
.. (6)
As this is an over-determined, linear equation sys-
tem, least squares method provides optimal solution
by querying all calibration data tuples for either M
λ
y
or M
λ
z
. The vector of variables can be created in dif-
ferent ways. In this work, the expressions (7) and (8)
render best results.
W
λ
lin
= [ 1 w
λ
1
w
λ
2
w
λ
3
] (7)
W
λ
poly
3
= [ 1 w
λ
1
w
λ
2
w
λ
3
(w
λ
1
)
2
(w
λ
2
)
2
(w
λ
3
)
2
...
...(w
λ
1
)
3
(w
λ
2
)
3
(w
λ
3
)
3
]
(8)
W
λ
lin
is simple and stable, W
λ
poly
3
is better suited to
cope with deformations or harmonics at the inflection
points of the strain signals. Vectors which include
cross product terms (as w
λ
1
· w
λ
2
) do not respond in
an adequate way.
5 INTEGRATION & RESULTS
In this paper the TJ-HIC control scheme was
presented and identified as adequate for an imple-
mentation in the multi-segmented inspection robot
Kairo-II. Two major function blocks of this scheme
were presented in detail: dynamic modeling and the
force feedback sensor. Outputs of both are to be
fused in a further function block to close the control
loop.
5.1 Sensor System
Some optimization criteria have been presented to
deal with the sensor’s accuracy. As a result we get an
angular and amplitude decomposition of the signal
which is presented in table 1. The presented results
indicate a good angular resolution (Birkenhofer et al.,
HYBRID IMPEDANCE CONTROL FOR MULTI-SEGMENTED INSPECTION ROBOT Kairo-II
221
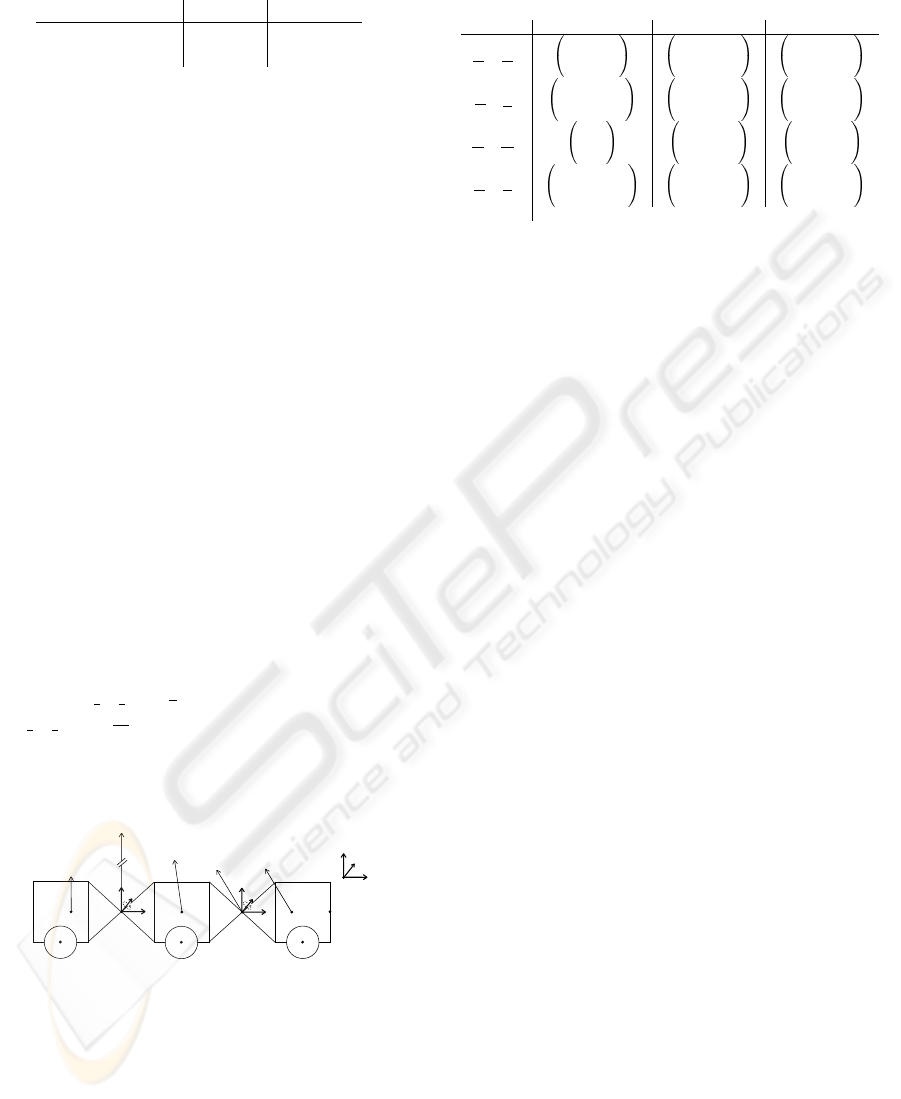
Table 1: Angular and amplitude decomposition.
25 Nm 200 Nm
angular error ±19
◦
±12, 8
◦
amplitude error ±26% ±18, 3%
2005). Amplitude resolution can be optimized by
complex material analyses. As we use the signal
for impedance control, the signal’s quality can be
weighted by impedance control factors M
d
, B
d
and
K
d
. A focus on the angular resolution signal is
therefore possible. With this method influence of the
amplitude of the signal can be minimized, whereas
the angular value of the signal gets strengthened.
5.2 Dynamic Modeling
The dynamic modeling of Kairo-II has been realized
as functional block in the software framework MCA.
Appropriate coordinate systems have been identified
to handle both efficient calculations within the model
and simple sensor fusion with other modules. There-
fore, a simplified dynamic modeling was introduced
that meets the mechanical requirements and reduces
the number of parameters drastically.
Sensor fusion can be implemented in a new module
easily, as all data sources (dynamic modeling, sensor
system) provide data in similar coordinate systems.
The following example depicts the working prin-
ciple of the algorithm (see Figure 6). All robot
joints are positioned in their nullposition. The robot
is fixed at its left end. In applying joint veloci-
ties (ALPHA M qd) 3
1
s
and joint accelerations (AL-
PHA M qdd) 3
1
s
2
to all joints. Forces and moments
within the system arise. They can be calculated ac-
cording to the RNE algorithm. Results are presented
in table 2 and depicted as vectors in Figure 6.
R
4,0
F
4
R
7,0
F
7
R
7,0
f
7
R
4,0
f
4
link 7
link 4
x
y
z
R
1,0
F
1
link 1
J
2
J
5
R
8,0
f
8
=0
COM COM COM
Figure 6: Robot configuration with three segments.
6 CONCLUSION
A control scheme for multi-segmented robots was
presented. As controlling the robot’s redundancy is
both challenging and promising, this scheme can han-
dle the ambiguity of the system. Crucial modules of
the TJ-HIC scheme were identified and implemented
in this paper. As the other - relevant - modules of the
Table 2: Sensor Outputs of the RNE algorithm (forces [N],
moments [Nm]).
i 1 4 7
R
i,0
F
i
0
0
67.17
−14.19
0
99.47
−50.06
0
82.85
R
i,0
f
i
−64.25
0
249.49
−64.25
0
182.31
−50.06
0
82.85
R
i,0
N
i
0
0
0
0
−0.41
0
0
−0.34
0
R
i,0
n
i
0
−106.28
0
0
−54.71
0
0
−10.29
0
control scheme (i.e. trajectory planning and potential
function) are kept to minimal complexity, the control
loop can be closed now.
Future work has to be done in the field of not only
handling but using the redundancy of Kairo-II. In do-
ing so, huge driving capabilities are expected. The
system is then able not only to fulfill a main task but
also an user-defined subtask like positioning an in-
spection module or avoiding obstacles.
REFERENCES
Birkenhofer, C., Hoffmeister, M., Z
¨
ollner, J.-M., and Dill-
mann, R. (2005). Compliant motion of a multi-
segmented inspection robot. In IRS, Edmonton.
Birkenhofer, C., Scholl, K.-U., Z
¨
ollner, J.-M., and Dill-
mann, R. (2004). A new modular concept for a multi-
joint, autonomous inspection robot. In (IAS 8).
Choset, H. and Henning, W. (1999). A follow-the-leader
approach to serpentine robot motion planning. SCE
Journal of Aerospace Engineering.
Fu, K., Gonzalez, R. C., and Lee, C. G. (1987). Robotics
- Control, Sensing, Viion and Intelligence. McGraw-
Hill International Editions.
Hogan, N. (1985). Impedance control: An approach to ma-
nipulation, parts i - iii. ASME J. Dynam. Syst., Meas.,
Contr., 107:1–24.
Khatib, O. (1987). A unified approach to motion and force
control of robot manip ulators: The operational space
formulation. IEEE Journal on Robotics and Automa-
tion, 3(1):43–53.
Salisbury, K. (1980). Acitve stiffness control of manipula-
tors in cartesian coordinates. IEEE Int. Conf. Robotics
and Automation, pages 95–100.
Scholl, K.-U., Albiez, J., and Gassmann, B. (2001). Mca -
an expandable modular controller architecture. In 3rd
Real-Time Linux Workshop.
Scholl, K.-U., Kepplin, V., Berns, K., and Dillmann, R.
(2000). Controlling a Multi-joint Robot for Au-
tonomous Sewer Inspection. In ICRA.
Shah, M. and Patel, R. (2005). Transpose jacobian based
hybrid impedance control of redundant manipulators.
In CCA, pages 1367– 1372.
ICINCO 2006 - ROBOTICS AND AUTOMATION
222
