
A NEURAL NETWORK-BASED SENSOR FOR ELDER
FALLING DETECTION
Jiann-I Pan
, Cheng-Jie Yung
Department of Medical Informatics, Tzu-Chi University, Hua-Lien, Taiwan
Chung Chao Liang
M.D., Tzu-Chi Hospital, Hua-Lien, Taiwan
Keywords: Fall detection, accelerometer, neural network, back-propagation model.
Abstract: Falling down is going to be a crucial problem to an elder today. In many countries, unintentional injury was
being one of the leading causes of death in persons over age 65 years. As the society now, there are more
and more solitary elders of life alone and because of the isolation, it is necessary to design an intelligent and
sensitive falling detector for the elderly people. In this paper, we present an intelligent and portable fall
detection device based on artificial neural network technology. This fall detector consists of two main
components: accelerometer and microprocessor. The tri-axis accelerometer is used to continuously measure
the variation of elder’s 3 ways acceleration. The microprocessor reads the signals from the accelerometer
and performs the fall activity recognition through a back-propagation neural network model. This device is
integrated in a small box which can be holding on the belt for elder.
1 INTRODUCTION
Approximately 20% to 30% of elderly persons over
age 65 years fall each year, and this rate of falling
increases with age (Tinette, 1994). Therefore, the
falling has become a crucial problem of public
health and clinical problem among elderly persons.
As reported by (Doughty, 2000; Blake, 1992), falls
may lead to injury, fear of falling again, or traumatic
death. In many countries, unintentional injury was
being one of the leading causes of death in persons
over age 65 years (Haga, 1986; Tinette, 1994). In
general, a typical homecare emergency service
model for elder fall consists of four basic phases: (1)
discovering the fall event; (2) communicating the
call centre or hospital for requesting an emergency
service; (3) the call centre dispatch an ambulance to
the elder’s house; and (4) rescuing the elder. It is
obviously that all the activities of emergency service
are derived by discovering the elder falling down.
Therefore, as soon as possible to discover the fall
accident can effectively reduce the risk of death for
elder.
However, as the society now, there are more
and more elders choose solitary life or have only
oneself at home alone in the daytime. It makes the
discovery of fall accident more difficult. Therefore,
the objective of this paper is to develop an automatic
and intelligent fall detector. This fall detector
consists of two main components. First, the tri-axis
accelerometer is used to continuously measure the
variation of elder’s 3 ways acceleration. Second, the
microprocessor reads the signals from the
accelerometer and performs the fall activity
recognition through a back-propagation neural
network model. The incident that if fall, the
microprocessor unit will immediately alarm the
nearby persons to help quickly.
2 RELATED WORK
The simplest detection approach is that passive to
find the fall event. That is, when the elder falling
down, it needs the elder oneself to push a button on
the device to alarm the nearby person. The main
drawback of such devices is that need a human to
initiate the alarm. It will be useless when the elder is
203
Pan J., Yung C. and Chao Liang C. (2006).
A NEURAL NETWORK-BASED SENSOR FOR ELDER FALLING DETECTION.
In Proceedings of the Third International Conference on Informatics in Control, Automation and Robotics, pages 203-206
DOI: 10.5220/0001210002030206
Copyright
c
SciTePress

unconsciousness.
Another type of detection approaches is that
active to detect the fall event. The active detection
approaches can be further classified as portable
(personal worn device) and positioned
(environmental build-in):
1. Positioned fall detector: Equipments such as
video cameras or sensors are positioned on particular
places to detect the fall event. For examples,
Williams et al (Williams, et al, 1998) put the
vibration detector and posture sensor on the floor to
detect the fall event. Yamaguchi (Yamaguchi, 1998)
has place the infrared sensors on the door of
bathroom to detect the time spent in bathroom.
However, due to the sensors are fixed on the
environment, it will unworkable when the elder is
out of the detectable area.
2. Portable fall detector: The sensors integrated
with the microprocessor which having the fall
decision algorithms embedded into a small box or on
a cloth. For examples, Noury (Noury, 2002)
measures the vertical acceleration, posture, and
physiological vibrations by different sensors. After a
level triggering, a Boolean data is generated for the
position, fall, and vibration which is further
interpreted by an algorithm for the decision of the
fall. Degen et al (Degen and Jaeckel, 2003) designed
a fall detector in the form of a wrist watch. Their
approach is to integrate the norm of the three axes
acceleration vector and the two integrals. In these
approaches, the decision of fall event is based on the
predefined thresholds.
The main advantage of positioned detector is
that the device will not uncomfortable to the elder,
but there is restriction of activity area. The design
relative to positioned type, the portable device
makes the activity area not limit. According to the
considerations of privacy and portability, we focus
on developing a portable fall detector. Compared our
approach with the others portable detectors, the main
different is that the use of neural network classifier
to instead of a predefined falling thresholds.
3 MATERIAL
3.1 Principle of Fall Detection
The first step of our approach is to measure the three
axes acceleration vector via an accelerometer. As
shown in Figure 1, a free falling down will result the
accelerations of body’s three axes have changes in
various degree. For example, the y axis and z axis
will have more huge acceleration variation during a
forward fall.
Figure 1: During fall the accelerations of three directions
have changes in various degrees.
Artificial neural network technique was used to
perform the second step, i.e. the fall confidence
pattern recognition. There are two phases in neural
network: learning phase and recalling phase (see
Figure 2).
Figure 2: A neural network based approach to classifying
fall activities.
In the learning phase, a supervised learning
algorithm is adapted to train the neural network from
positive examples and negative examples. The
learning rule to adjust the weights and biases of the
network is based on the back-propagation training
algorithm. By the iterative training process, the
connective weights and bias in the neural network
can be refined to fit the generation of expect output.
Thus, in the recalling phase (also called predicate
phase) the input elder activities can be classified or
predicted by the trained neural network.
3.2 Architecture of the Intelligent
Fall Detector
The intelligent fall detector that proposed in this
paper comprised two key components: an
accelerometer module and a processing unit. Figure
3 shows the functional block diagram for the
intelligent fall detector.
ICINCO 2006 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
204
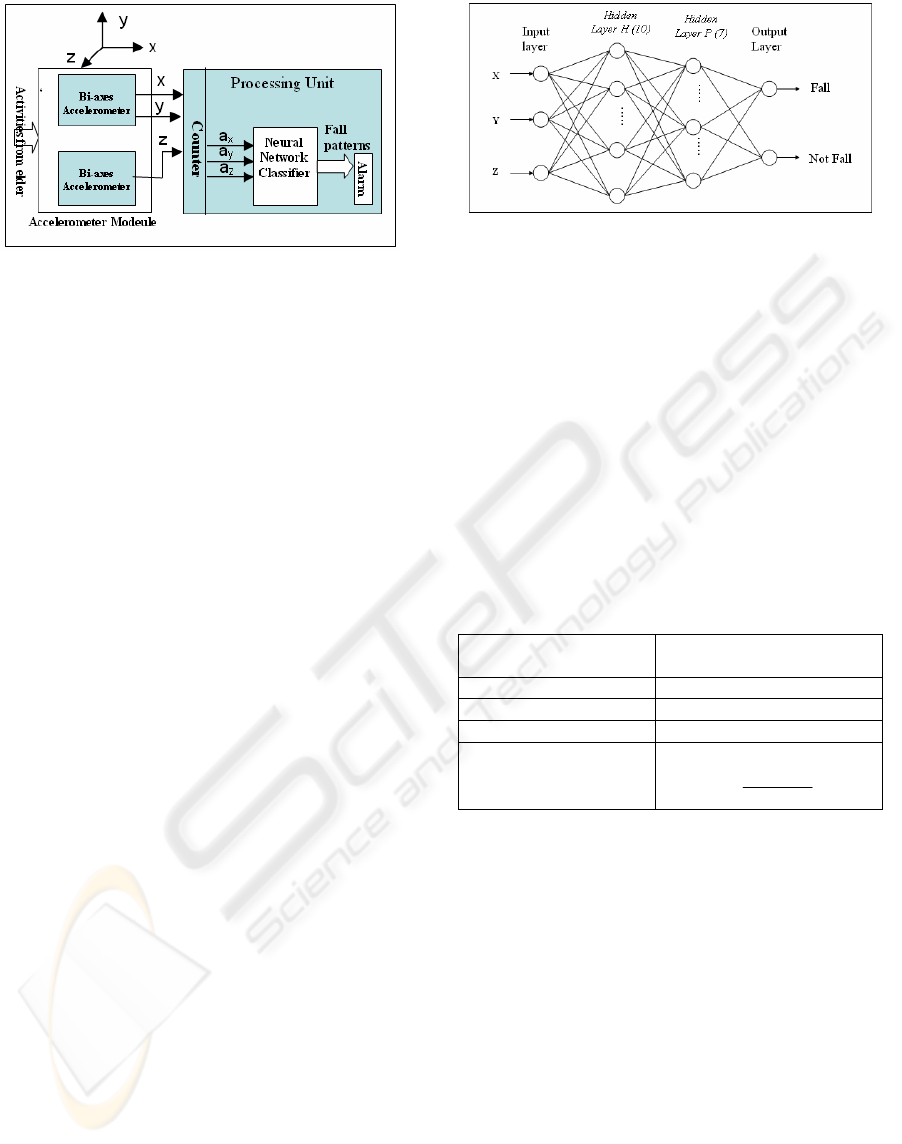
Figure 3: The block diagram for intelligent fall detector.
The accelerometer module (implemented by
two bi-axes accelerometers, ADXL 202JE, Analog
Device Inc.) senses the elder activities continuously.
The output signal from accelerometer is modulated
by pulse width modulation (PWM). The processing
unit (implemented by MSP430, TI) handles three
activities: reads the incoming data from the
accelerometer module (the PWM signals that output
from accelerometers are calculated by a counter in
order to get the numerical value of acceleration);
performs neural network-based classification to
determine the fall activities; and produces an alarm
to indicate a fall event in happening.
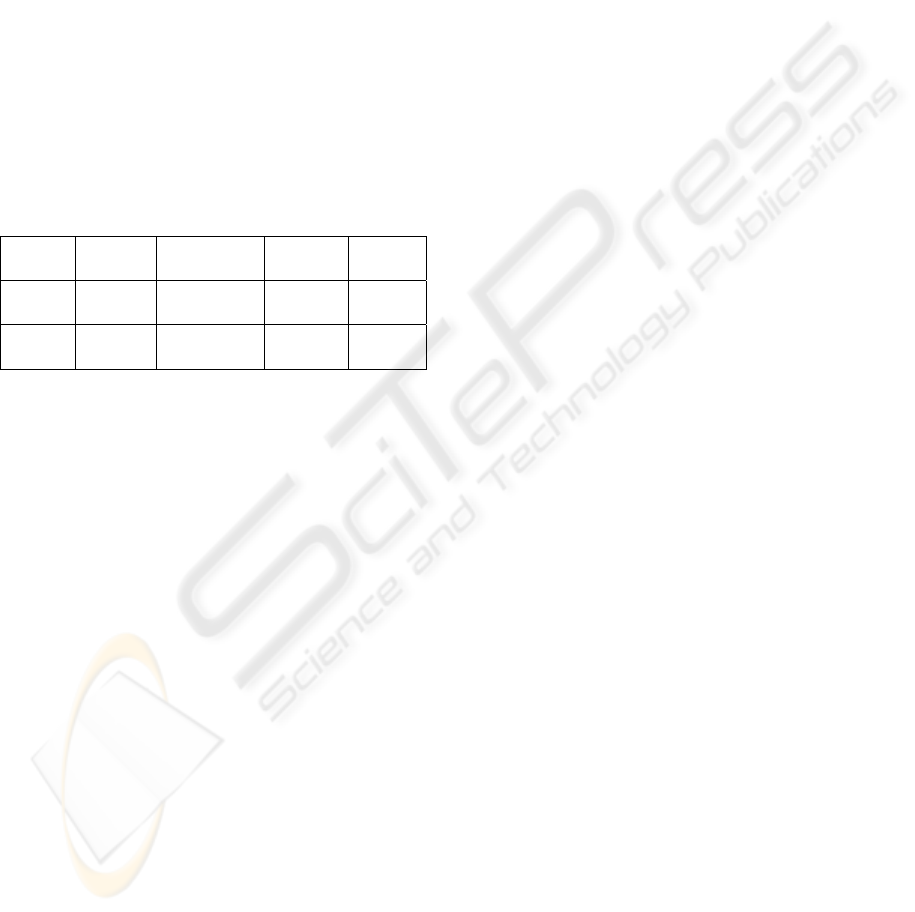
3.3 The Structure of Neural
Network Classifier
An artificial neural network (ANN) based on
back-propagation algorithm is trained for classifying
falling activities. The structure of the
back-propagation network model comprises four
layers: one input layer, two hidden layer, and one
output layer. The input layer which consists of three
neurons reads data from the three axes accelerations.
The hidden layer consists of two layers which
arranged as 10 neurons and 7 neurons respectively.
The output layer represents the fall patterns, i.e. fall,
and not fall. This structure is gained after numerous
explorations of different hidden layers and neurons.
This network is a fully-connected architecture. The
structure of ANN is shown in Figure 4.
The activity output from this detector can be
classified into two possible patterns: fall and not fall.
If the “fall” pattern is recognized, it will trigger an
alarm to indicate the accident to nearby persons. The
“not fall” pattern means nothing of accident.
Figure 4: The structure of the back-propagation neural
network classifier.
4 RESULTS
A prototype of the intelligent fall detector has been
prepared, which implements the methodology
explained above. According to the safety
consideration, the experimentation is took place in
the laboratory and only young people chosen as the
subject in the experimentation. It involved six
subjects whose aged between 21 and 23.
The initial setup for back-propagation neural
network model is summarized in Table 1.
Table1: The setup for Back-propagation neural network.
Numbers of neurons in
each layer
Input / Output layers: 3 / 2
Hidden layers H / P: 10 / 7
Learning cycle 20000 times
Learning rate 0.5
Momentum 0.01
Activation function
Hyperbolic tangent function
ax
ax
e
e
xf
−
−
+
−
=
1
1
)(
In the experimentation, each subject simulates
different possible activities which included 12
normal and 6 fall activities. Here, the basic normal
activities of daily living, where extended from (Wu,
2000), included walking, slow running, sitting down
and rising from a chair or sofa, climbing and
descending the stairs, picking up an object from the
floor, transferring in and out of a tub, and getting up
and lying down to a bed. The fall activities can be
simply classified according to the posture of elder’s
normal activities and ways of falling. We defined six
possible ways of falling activities:
z The body vertical (stand, walking, or running)
and falling forward,
z The body vertical and falling backward,
z The body vertical and falling right side or left
side,
z The body crooked (sit, squat, or stoop) and
A NEURAL NETWORK-BASED SENSOR FOR ELDER FALLING DETECTION
205
falling forward,
z The body crooked and falling backward, and
z The body crooked and falling right side or left
side.
These activities are simulated by the MatLab7
neural network tool in the learning phase. Through
20,000 times iterative learning, the back propagation
network is converged. In the recall phase, we
evaluate 90 activities which are the same activity
types as in the learning phase. In the evaluation, two
types of failure are adapted in our testing
(Yamaguchi, 1998). The first type of failure is that
the device indicating a fall event, but the real
situation is nothing. The next type of failure is the
fall accident is real in happened, but not detected by
the detector. The evaluation results are shown in
Table 2.
Table 2: The evaluation result for detecting normal and fall
activities.
Activitie
s
Num. of
evaluation
Success
detection
Error
detection
Correct
rate
Normal
activitie
s
60
No alarmed
57
Alarmed
3
95%
Fall
activitie
s
30
Alarmed
28
No Alarmed
2
93.3%
The similar experiment is repeated several
times. We have found that detection errors in testing
normal activities are almost distributed in “sit down”
activity. The errors in testing fall activities are
distributed in the “body crooked and falling right
side”. Next, the factors of subject’s agility, the
distance from detector to ground, and the numbers of
learning cycle in back-propagation neural network
are also infected the correct rate in the experiment.
5 CONCLUSIONS
An intelligent fall detector that based on artificial
neural network technology is introduced in this
paper. Comparing with other approaches, the correct
rate of recognition of fall activity by neural network
learning approach is better than the predefined
threshold value approach. In the future research, we
will explore the others learning approaches, such as
Hidden Markov Model classifier, to compare with
the neural network approach.
ACKNOWLEDGEMENTS
This project was funded by the National Science
Council, Taiwan (grant number NSC94-2218-E-
320- 003).
REFERENCES
Blake, A.J., 1992. Fall in the elderly. Br J Hosp Med, 47,
268-72.
Degen, T. and Jaeckel, H., 2003. SPEEDY: a fall detector
in a wrist watch. In Proceedings of 7th IEEE
International Symposium on Wearable Computers.
21-23 Oct.. pp.184 – 187
Doughty, K., 2000. Fall prevention and management
strategies based on intelligent detection, monitoring
and assessment. Presented at New Technologies in
Medicine for the Elderly, Charing Cross Hospital, 30
th
,
Nov.
Haga, H., Shibata, H., Mitsuzaki, T., and Hatano, S., 1986.
Falls in the institutionalized elderly in Japan. Arch
Gerentol. Geriatr. Vol.5, pp.1-9
Mathie, M.J., Basilakis, J., and Celler, B.G., 2001. A
system for monitoring posture and physical actitity
using accelerometers. In Proceedings of the 23rd
Annual EMBS International Conference, 25-28 Oct.
Turkey. Pp.3654-3657
Noury, N., 2002. A smart sensor for the remote follow up
of activity and fall detection of the elderly. 2
nd
Annual
International IEEE-EMBS Special Topic Conference
on Microtechnologies in Medicine & Biology. May
Madison, Wisconsin. USA. pp.314-317
Tinetti, M.E., 1994. Prevention of falls and fall injuries in
elderly persons: a research agenda. Preventive
Medicine. Vol 23. pp.756-762
Williams, G., 1998. Doughty, K., Cameron,K. and
Bradley, D.A.. A smart fall and activity monitor for
telecare applications. In International Conference of
IEEE-EMBS, HongKong, pp.1151-1154
Wu, G., 2000. Distinguishing fall activities from normal
activities by velocity characteristics. Journal of
Biomechanics, Vol. 33. pp.1497-1500
Yamaguchi, A., 1998. Monitoring behavior in home using
positioning sensors. In International Conference of
IEEE-EMBS, HongKong, pp.1977-1979
ICINCO 2006 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
206
