
PATTERN TRACKING AND VISUAL SERVOING FOR INDOOR
MOBILE ROBOT ENVIRONMENT MAPPING
AND AUTONOMOUS NAVIGATION
O. Ait Aider, G. Blanc, Y. Mezouar and P. Martinet
LASMEA
UBP Clermont II, CNRS - UMR6602
24 Avenue des Landais, 63177 Aubiere, France
Keywords:
Mobile robot, autonomous navigation, pattern tracking, visual servoing.
Abstract:
The paper describes a complete framework for autonomous environment mapping, localization and navigation
using exclusively monocular vision. The environment map is a mosaic of 2D patterns detected on the ceiling
plane and used as natural landmarks. The robot is able to localize itself and to reproduce learned trajectories
defined by a set of key images representing the visual memory. A specific multiple 2D pattern tracker was
developed for the application. It is based on particle filtering and uses both image contours and gray scale level
variations to track efficiently 2D patterns even on cluttered ceiling appearance. When running autonomously,
the robot is controlled by a visual servoing law adapted to its nonholonomic constraint. Based on the regu-
lation of successive homographies, this control law guides the robot along the reference visual route without
explicitly planning any trajectory. Real experiment results illustrate the validity of the presented framework.
1 INTRODUCTION
For an indoor mobile robot system, the ability to au-
tonomously map its environment and localize itself
relatively to this map is a highly desired property. Us-
ing natural rather than artificial landmarks is another
important requirement. Several works using monocu-
lar vision for mapping and self localization exist. The
most important difficulty is to achieve the generation
of a sufficient number of landmarks which can be ro-
bustly recognized during navigation session with a
near real time rate. Interest points (Se et al., 2001),
straight lines (Talluri and Aggarwal, 1996) and rec-
tangular patterns (Hayet, 2003) were used. The first
approaches focused on producing efficient algorithms
to match a set of observed patterns with a subset of the
map primitives (Talluri and Aggarwal, 1996). Multi-
ple sensor data fusion (odometry) was generally used
to achieve real time computing by eliminating ambi-
guities. More recently, the success of real-time track-
ing algorithms simplified the matching process and
allowed to use structure from motion technics to com-
pute the 3D coordinates of the observed features (Se
et al., 2001).
In this paper, we show how pattern tracking and vi-
sual servoing is used to provide a complete framework
for autonomous indoor mobile robot application. The
focus is done on three main points: i) environment
mapping with autonomous localization thanks to pat-
tern tracking, ii) path learning using visual memory,
iii) path reproducing using visual servoing.
The environment map is a mosaic of 2D patterns
detected on the ceiling plane and used as natural land-
marks. This makes the environment representation
minimalist and easy to update (only vector represen-
tations of the pattern are stored rather than entire im-
ages). During a learning session, landmarks are au-
tomatically detected, added to the map and tracked
in the image. The consistency of the reconstruction is
guaranteed thanks to the pattern tracker which enables
robot pose updating.
A specific pattern tracker was developed for the ap-
plication. This was motivated by the fact that for re-
alistic robotics applications there is a need for algo-
rithms enabling not only pattern tracking but also au-
tomatic generation and recognition. Among the large
variety of existing tracking methods, model-based ap-
proaches provide robust results. These methods can
use 3D models or 2D templates such as appearance
models (Jurie and Dhome, 2001; Black and Jepson,
1996) or Geometric primitives as contour curves and
CAD description (Marchand et al., 1999; Lowe, 1992;
Pece and Worrall, 2002). Object recognition algo-
rithms based on segmented contours (straight lines,
139
Ait Aider O., Blanc G., Mezouar Y. and Martinet P. (2006).
PATTERN TRACKING AND VISUAL SERVOING FOR INDOOR MOBILE ROBOT ENVIRONMENT MAPPING AND AUTONOMOUS NAVIGATION.
In Proceedings of the Third International Conference on Informatics in Control, Automation and Robotics, pages 139-147
DOI: 10.5220/0001211901390147
Copyright
c
SciTePress

ellipses, corners,...) have reached today a high level
of robustness and efficiency. Thus, it seems judicious
to investigates trackers which use contour based pat-
tern models. Note that tracking in cluttered back-
ground and with partial occlusions is challenging be-
cause representing patterns with only contour infor-
mation may produce ambiguous measurements. Ex-
tensive studies of either active or rigid contour track-
ing have been presented in literature (Isard and Blake,
1998; Zhong et al., 2000; Blake et al., 1993; Bascle
et al., 1994; Kass et al., 1988). The used methods are
usually defined in the Bayesian filtering framework
assuming that the evolution of the contour curve state
follows a Markov process (evolution model) and that
a noisy observation (measurement model) is avail-
able. The contour state is tracked using a probabilis-
tic recursive prediction and update strategy (Arulam-
palam et al., 2002). More recently, Particle filter-
ing was introduced in contour tracking to handle non
Gaussianity of noise and non linearity of evolution
model (Isard and Blake, 1998). The pattern tracker
used here, and whose first results were presented in
[*], is a contour model-based one and takes into ac-
count the image gray scale level variations. It uses
the condensation algorithm (Isard and Blake, 1998) to
track efficiently 2D patterns on cluttered background.
An original observation model is used to update the
particle filter state.
The robot is also able to reproduce learned trajec-
tories defined by a set of key images representing
the visual memory. Once the environment map is
built, a vision-based control scheme designed to con-
trol the robot motions along learned trajectories (vi-
sual route) is used. The nonholonomic constraints of
most current wheeled mobile robots makes the clas-
sical visual servoing methods unexploitable since the
camera is fixed on the robot (Tsakiris et al., 1998).
However, motivated by the development of 2D 1/2
visual-servoing method proposed by Malis et al (see
(Malis et al., 1999)), some authors have investigated
the use of homography and epipolar geometry to sta-
bilize mobile robots (Fang et al., 2002), (Chen et al.,
2003). In this paper, because the notions of visual
route and path are very close, we turn the nonholo-
nomic visual-servoing issue into a path following one.
The designed control law does not need any explicit
off-line path planning step.
The paper is organized as follows: in section II,
the autonomous environment mapping, robot local-
ization and navigation using key images, and the pat-
tern tracker are described. Section III deals with the
design of the control scheme. An experimental evalu-
ation is finally presented in section IV.
2 ENVIRONMENT MAPPING
AND TRAJECTORY LEARNING
2.1 Problem Formalization
The mobile robot system is composed of three frames
as shown in Figure 1: the world frame F
W
, the ro-
bot frame F
R
and the camera frame F
C
. To localize
the robot in its environnement one have to estimate
the transformation
W
T
R
between the world frame
and the robot frame. Assuming that the transforma-
tion
C
T
R
between the camera frame and the robot
frame is known thanks to a camera-robot calibrating
method, the image is corrected so that it corresponds
to what would be observed if the camera frame fits the
robot frame i.e.
C
T
R
= I. As the visual landmarks
are on the ceilling plane, the correction to apply on
the observed data is a homography
C
H
R
. Knowing
C
T
R
,
C
H
R
can be expressed as follows:
C
H
R
= K
R − tn
T
/d
K
−1
(1)
Where K is the camera intrinsic parameters matrix,
R and t are respectively the rotation matrix and the
translation vector in
C
T
R
, n is the vector normal to
the ceilling plane and d is the distance from the robot
frame to this plane. After applying the computed cor-
rection to image data, one can assume for the clarity
of the presentation and without loss of generality that
C
T
R
is set to the identity matrix.
F
R
F
C
F
W
C
H
R
ceiling Plane
2D pattern
Figure 1: The camera-robot system.
2.2 On-line Robot Pose Computing
Let us denote F
M
the 2D frame defined by the x and
y-axis of F
W
and related to the ceiling plane. We
assume that a set of 2D landmarks m
i
detected on
this plane are modeled and grouped in a mosaic rep-
resented by a set M =
m
i
,
M
T
i
, i = 1, ..., n
where the planar transformation matrix
M
T
i
between
F
M
and a frame F
i
related to m
i
defines the pose
of m
i
in the mosaic (Figure 2). We have
M
T
i
=
ICINCO 2006 - ROBOTICS AND AUTOMATION
140

F
M
F
C
F
m
i
F
(k)
I
F
(k)
i
F
(k)
C
M
T
C
m
i
M
T
i
i
T
C
i
L
(k)
i
X
C
Y
C
Z
C
Figure 2: Robot pose computing using visual data of a 2D
model.
M
R
i
M
P
i
0 1
where
M
R
i
=
Cθ
i
−Sθ
i
Sθ
i
Cθ
i
expresses the rotation of the model and
M
P
i
=
x
i
y
i
its position. Localizing the robot at an in-
stant k consists in computing
M
T
(k)
C
which defines
the homogenous transformation between the projec-
tion F
(k)
C
of the camera frame F
C
on the mosaic plane
as shown in Figure 2. At the instant k, the robot grabs
an image I
k
of the ceiling. Let F
(k)
I
be a 2D frame
lied to the image plane. The pose of the projection of
an observed model m
i
on the image plane is defined
by the transformation
I
L
(k)
i
=
I
r
(k)
i
I
p
(k)
i
0 1
be-
tween F
(k)
I
and a frame F
(k)
i
lied to the projection of
m
i
where
M
r
i
=
"
Cθ
(k)
i
−Sθ
(k)
i
Sθ
(k)
i
Cθ
(k)
i
#
express the
rotation of the model and
M
p
i
=
"
u
(k)
i
v
(k)
i
#
its po-
sition in the image. Considering the inverse of the
perspective projection, we obtain the transformation
between the projections F
(k)
C
and F
i
of the camera
frame and the model frame respectively on the mo-
saic plane (Figure 1):
C
T
(k)
i
=
C
R
i
C
P
i
0 1
=
"
I
r
(k)
i
Z
f
I
p
(k)
i
0 1
#
where Z is the distance from the origin of the cam-
era frame to the ceiling and f the focal length. We
can thus express the robot pose relatively to M with
respect to the parameters of a seen model m
i
by
M
T
(k)
C
=
M
T
i
C
T
(k)
i
−1
(2)
Note that the robot position is computed up to a
scale factor
Z
f
. The absolute position can be retrieved
if the camera is calibrated. Otherwise, the computed
pose is sufficient to achieve navigation using visual
servoing as we will see in section 3.
2.3 Environment Mapping
We will now explain the process of building the mo-
saic of 2D landmarks. At time k = 0, the robot grabs
an image I
0
, generates a first 2D model m
0
and as-
sociates to it a frame F
0
. In fact, this first model will
serve as a reference to the mosaic. Thus, we have
F
0
= F
M
and
M
T
(k)
0
= I (I is the identity matrix).
In the image I
0
, a tracker τ
0
is initialized with a state
I
L
(0)
i
. As the robot moves, the state of τ
0
evoluates
with respect to k. The system generates other mod-
els. At each generation of a new model m
i
at the
instant k, a new tracker τ
k
is initialized with a state
I
L
(k)
i
. Due to the mosaic rigidity, the transforma-
tion between the two model frames is time indepen-
dent and equal to
0
L
i
=
0
L
(k)
I
I
L
(k)
i
(Figure3). Not-
ing
0
L
i
=
0
r
i
0
p
i
0 1
and projecting this trans-
formation onto the mosaic plane we obtain the pose
M
T
i
=
0
r
i
Z
f
0
p
i
0 1
of the new model m
i
in M:
Zc
Yc
Xc
F
0
F
C
F
i
0
L
(k)
i
F
(k)
i
0
T
i
m
i
m
0
Figure 3: Computing the pose of a new model in the mosaic.
m
0
m
1
m
2
m
3
I
0
I
1
I
2
Figure 4: An example of key images forming a trajectory.
Of course, as the robot moves, m
0
may eventually
disappear at an instant k when creating a new model
m
i
. In fact, it is sufficient that at least one model m
j
,
already defined in the mosaic, is seen at the instant k.
To compute the pose
M
T
i
, we first calculate
j
L
i
and
PATTERN TRACKING AND VISUAL SERVOING FOR INDOOR MOBILE ROBOT ENVIRONMENT MAPPING
AND AUTONOMOUS NAVIGATION
141

project it to obtain
j
T
i
. The model m
i
is then added
to M with the pose
M
T
i
=
0
T
j
j
T
i
. Figure 5 shows
an example of mosaic construction using the sequence
presented on the left hand side. The set of images rep-
resents the detected 2D models. The right image is a
representation of the constructed mosaic and the robot
locations (gray triangles) during navigation.
(a) (b)
Figure 5: An example of mosaic: (a) a set of key-images
with detected 2D patterns, (b) The mosaic and robot loca-
tions.
2.4 Path Learning and Visual
Navigation
The idea is to enable the robot to learn and repro-
duce some paths joining important places in the en-
vironment. Let us consider a trajectory executed dur-
ing the learning phase and joining a point A to a
point B. A set of so called key images is chosen
among the sequence of video images acquired dur-
ing the learning stage. A key image I
k
is defined by
a set of mosaic models and their poses in the image
(Figure 4): I
(AB)
k
=
n
m
i
,
I
L
(k)
i
, i = 1, 2, ...
o
. A
trajectory relating A and B is then noticed Φ
AB
=
n
I
(AB)
k
, k = 1, 2, ...
o
. Key images are chosen so
that the combination of the elementary trajectories be-
tween each couple of successive key images I
(AB)
k
and I
(AB)
k+1
forms a global trajectory which approxi-
matively fits the learned trajectory. Some conditions
have to be satisfied when creating Φ
AB
: i) two suc-
cessive key images must contain at least one common
model of the mosaic, ii) the variation of the orienta-
tion of a model between two successive key images is
smaller than a defined threshold. The first condition
is necessary to visual servoing. The second is moti-
vated by the fact that several different paths joining
two poses do exist. It is thus necessary to insert ad-
ditional key images to reduce the variation of orienta-
tion between two successive images (Figure 4).Visual
servoing is used to carry the robot from a key image
to another.
2.5 Pattern Tracking
The tracking problem can be expressed as the es-
timation of the state of a dynamical system basing
on noisy measurements done at discrete times. Let
us consider that, at time k, the state of a system is
defined by a vector X
k
and the measurements by a
vector Z
k
. Based on a Bayesian approach, the track-
ing consists in iteratively predicting and updating the
posterior density function (pdf) of the system state
using respectively the dynamical and the observation
models. The pdf p (X
k
|Z
1:k
) is thus estimated as the
vector Z
1:k
= (Z
i
, i = 1, ..., k) containing the latest
measurements becomes available online.
The tracker developed for this application uses
the condensation algorithm (Isard and Blake, 1998)
which is based on particle filtering theory (Arulam-
palam et al., 2002). First, a pattern model is de-
fined in the image inside an interest window. It is
composed of contours approximated by segments and
arcs. The model contains also a list of vectors whose
elements represent the evolution of image gray scales
in the gradient direction around points sampled on the
contours (Figure 6). Polygonal representation of the
contours is used for automatic pattern generation and
recognition. This enables tracking initialization. Dur-
ing the tracking, only gray scale vectors are used to
estimate the state of the pattern. To formalize this
model, let us consider a window of interest in the im-
age with a center (x
c
, y
c
) and dimensions ∆
x
and ∆
y
.
Each segmented contour is sampled in a set of image
points
m
(j)
=
u
(j)
, v
(j)
, j = 1, ..., N
m
where
N
m
is the number of points. At each point, we built a
vector V
(j)
=
g
(j)
1
, g
(j)
2
, ..., g
(j)
l
, ...
T
composed of
N
s
gray scale value samples from the image follow-
ing the gradient direction at the pixel m
(j)
and with
a fixed step size δ. g
(j)
l
is a bilinear approximation
of the gray scale values of the nearest four pixels. A
pattern model can thus be expressed as follows:
M =
n
U
(j)
, V
(j)
, W
(j)
, j = 1, ..., N
m
o
(3)
with U
(j)
=
x
(j)
, y
(j)
, φ
(j)
T
, where x
(j)
=
u
(j)
−x
c
∆
x
and y
(j)
=
v
(j)
−y
c
∆
y
are the normalized co-
ordinates of m
(j)
inside the interest window and
φ
(j)
the gradient orientation at m
(j)
. The vector
W
(j)
=
a
(j)
, b
(j)
, ...
T
is composed of a set of
parameters defining a function
˜
C
(j)
GG
which is an ap-
proximation of the one-dimensional discrete normal-
ized auto-correlation function C
(j)
GG
of G
(j)
where
G
(j)
(l) = g
(j)
l
for l = 1, ..., N
s
, and G
(j)
(l) = 0
elsewhere. We have
ICINCO 2006 - ROBOTICS AND AUTOMATION
142
C
(j)
GG
(λ) = 1/ k V
(j)
k
2
N
S
l=−N
S
G
(j)
(l) G
(j)
(l − λ)
The simplest expression of
˜
C
(j)
GG
is a straight line
equation (Figure 7). W
(j)
is then one-dimensional
and equal to the slope.
Gray
scale
value
Image
window
φ
(j)
x
(j)
y
(j)
m
(j)
V
(j)
l
Figure 6: Pattern model: sampled points on segmented con-
tours and corresponding gray scale vectors in the gradient
direction.
1
1
λ
λ
(j)
Ω
˜
C
(j)
GG
λ
(j)
=
˜
C
(j)−1
GG
k
C
(j)
GG
k
p
Z
(j)
|S
(j)
Figure 7: Deriving the probability measure from the inter-
correlation measure.
The state vector X
k
defines the pattern pose in im-
age I
k
at time k :
X
k
= (x
k
, y
k
, θ
k
, s
k
)
T
(4)
x
k
, y
k
, θ
k
are respectively the position of the
pattern center and its orientation in the image frame
and s
k
is the scale factor. The key idea is to use
a Monte Carlo method to represent the pdf of X
k
by a set of samples (particles) S
(i)
k
. A weight w
(i)
k
is associated to each particle. It corresponds to the
probability of realization of the particle. Starting
from a set
n
S
(i)
k
, i = 1, ..., N
p
o
of N
p
particles
with equal weights w
(i)
k
, the algorithm consists
in iteratively: 1) applying the evolution model on
each particle to make it evolve toward a new state
S
(i)
k+1
, 2) computing the new weights w
(i)
k+1
using
the observation model, 3) re-sampling the particle
set (particles with small weights are discarded while
particles which obtained high scores are duplicated
so that N
p
remains constant).
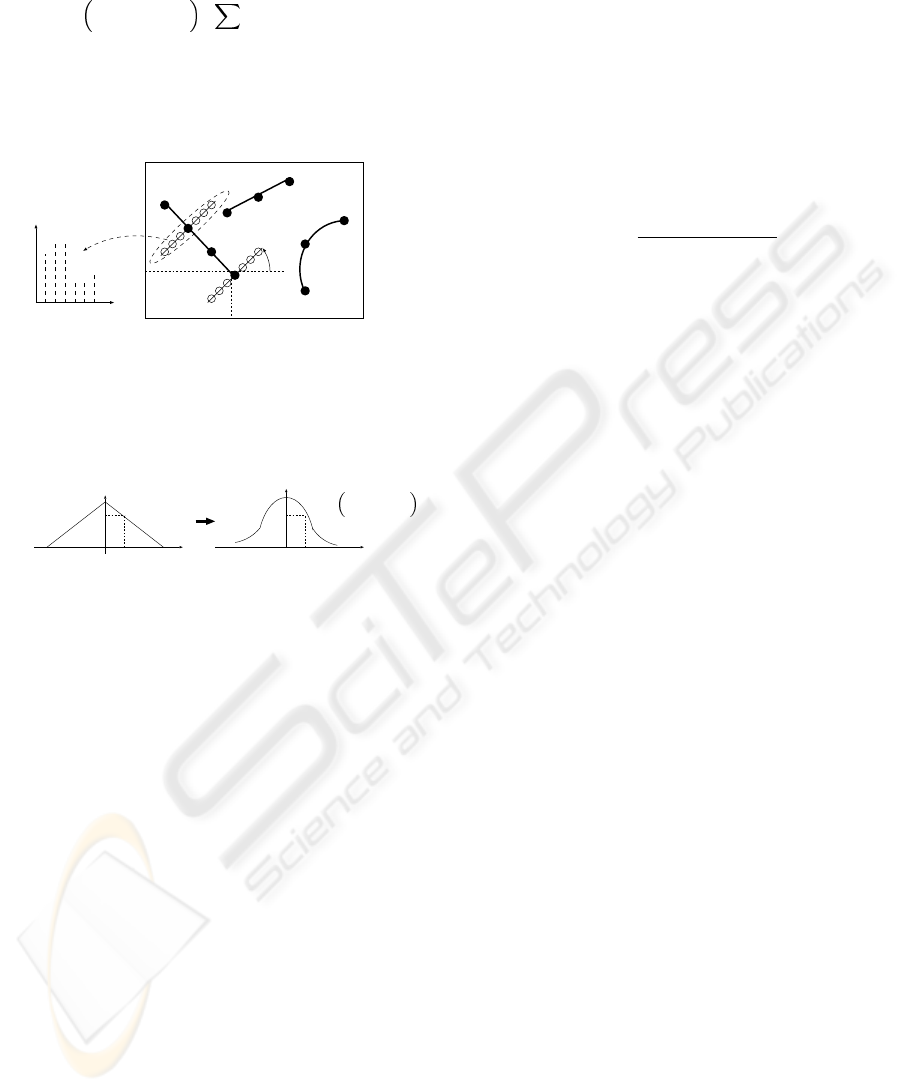
A key point in particle filtering is the definition
of the observation model Z
k
in order to estimate
w
(i)
k
= p
Z
k
|S
(i)
k
. For each predicted particle
S
(i)
k
, the model is fitted to the image I
k
. Around
each image point coinciding with a model point m
j
,
an observed vector V
(j)
k
=
g
(j)
1
, g
(j)
2
, ..., g
(j)
l
, ...
T
of gray scales is built following a direction which is
the transformation of the gradient orientation of the
model. For each observed vector we compute the nor-
malized inter-correlation between the vector stored in
the model and the observed vector components:
C
(j)
GG
k
=
V
(j)
.V
(j)
k
k V
(j)
kk V
(j)
k
k
The question is now how to use the inter-correlation
measure to estimate p
Z
k
|S
(i)
k
? We first com-
pute the probability p
Z
(j)
k
|S
(i)
k
that each model
point m
(j)
is placed according to the state vec-
tor particle S
(i)
k
on the corresponding point in the
observed pattern. The maximum of probability is
expected at m
(j)
. The inter-correlation measure
C
(j)
GG
(k)
can yeld an estimate of the deviation λ
(j)
=
˜
C
(j)−1
GG
C
(j)
GG
k
between the observed and the pre-
dicted gray scale vectors,
˜
C
(j)−1
GG
being the inverse
of the auto-correlation function. Assuming that the
probability that the observed gray scale vector fits the
predicted one follows a Gaussian distribution with re-
spect to λ
(j)
(Figure 7) we can reasonably approx-
imate p
Z
(j)
k
|S
(i)
k
by Ω
σ
(λ), the one-dimensional
Gaussian function with standard deviation σ. Assum-
ing that the probabilities p
Z
(j)
k
|S
(i)
k
are mutually
independent, it results that
p
Z
k
|S
(i)
k
=
N
p
Y
j=1
p
Z
(j)
k
|S
(i)
k
(5)
more details about handling partial occlusions and
scale changing effects can be found in [*].
3 VISUAL ROUTE FOLLOWING
Visual-servoing is often considered as a way to
achieve positioning tasks. Classical methods, based
on the task function formalism, are based on the exis-
tence of a diffeomorphism between the sensor space
and the robot’s configuration space. Due to the non-
holomic constraints of most of wheeled mobile ro-
bots, under the condition of rolling without slipping,
such a diffeomorphism does not exist if the camera is
rigidly fixed to the robot. In (Tsakiris et al., 1998),
PATTERN TRACKING AND VISUAL SERVOING FOR INDOOR MOBILE ROBOT ENVIRONMENT MAPPING
AND AUTONOMOUS NAVIGATION
143

O
i
O
i+1
c
F
Landmark
γ
i+1
F
i
F
i
i+1
I
I
Y
i+1
Y
i
c
O
X
Z
c
c
Y
c
c
I
Figure 8: Frames and images: I
i
and I
i+1
are two consec-
utive key images, acquired along a teleoperated path γ.
the authors add extra degrees of freedom to the cam-
era. The camera pose can then be regulated in a closed
loop.
In the case of an embedded and fixed camera, the con-
trol of the camera is generally based on wheeled mo-
bile robots control theory (Samson, 1995). In (Ma
et al., 1999), a car-like robot is controlled with re-
spect to the projection of a ground curve in the im-
age plane. The control law is formalized as a path
following problem. More recently, in (Chen et al.,
2003), a partial estimation of the camera displace-
ment between the current and desired views has been
exploited to design vision-based control laws. A tra-
jectory following task is achieved. The trajectory to
follow is defined by a prerecorded video. In our case,
unlike a whole video sequence, we deal with a set of
relay images which have been acquired from geomet-
rically spaced out points of view.
A visual route following can be considered as a se-
quence of visual-servoing tasks. A stabilization ap-
proach could thus be used to control the camera mo-
tions from a key image to the next one. However, a
visual route is fundamentally a path. To design the
controller, described in the sequel, the key images of
the reference visual route are considered as consec-
utive checkpoints to reach in the sensor space. The
control problem is formulated as a path following to
guide the nonholonomic mobile robot along the visual
route.
3.1 Assumptions and Models
Let I
i
, I
i+1
be two consecutive key images of a
given visual route to follow and I
c
be the current
image. Let us note F
i
= (O
i
, X
i
, Y
i
, Z
i
) and
F
i+1
= (O
i+1
, X
i+1
, Y
i+1
, Z
i+1
) the frames at-
tached to the robot when I
i
and I
i+1
were stored and
F
c
= (O
c
, X
c
, Y
c
, Z
c
) a frame attached to the robot
in its current location. Figure 8 illustrates this setup.
The origin O
c
of F
c
is on the axle midpoint of a cart-
O
i+1
c
F
c
i+1
c
i+1
t
Landmark
i+1
F
i+1
I
Y
i+1
Y
c
c
I
Γ
ω
V
R ,
H
Figure 9: Control strategy.
like robot, which evolutes on a perfect ground plane.
The control vector of the considered cart-like robot
is u = [V, ω]
T
where V is the longitudinal veloc-
ity along the axle Y
c
of F
c
, and ω is the rotational
velocity around Z
c
. The hand-eye parameters (i. e.
the rigid transformation between F
c
and the frame at-
tached to the camera) are supposed to be known.
The state of a set of visual features P
i
is known
in the images I
i
and I
i+1
. Moreover P
i
has been
tracked during the learning step along the path ψ be-
tween F
i
and F
i+1
. The state of P
i
is also assumed
available in I
c
(i.e P
i
is in the camera field of view).
The task to achieve is to drive the state of P
i
from its
current value to its value in I
i+1
.
3.2 Principle
Consider the straight line Γ = (O
i+1
, Y
i+1
) (see Fig-
ure 9). The control strategy consists in guiding I
c
to
I
i+1
by regulating asymptotically the axle Y
c
on Γ.
The control objective is achieved if Y
c
is regulated to
Γ before the origin of F
c
reaches the origin of F
i+1
.
This can be done using chained systems. Indeed in
this case chained system properties are very interest-
ing. A chained system results from a conversion of a
mobile robot non linear model into an almost linear
one (Samson, 1995). As long as the robot longitudi-
nal velocity V is non zero, the performances of path
following can be determined in terms of settling dis-
tance (Thuilot et al., 2002). The settling distance has
to be chosen with respect to robot and perception al-
gorithm performances.
The lateral and angular deviations of F
c
with re-
spect to Γ to regulate can be obtained through par-
tial Euclidean reconstructions as described in the next
section.
3.3 Evaluating Euclidean State
The tracker presented in Section 2.5 can provide a set
of image points P
i
= {p
ik
, k = 1 · · · n} belong-
ing to I
i+1
. These points are matched with the set
of image points P
c
= {p
ck
, k = 1 · · · n} of I
c
.
Let Π be a 3D reference plane defined by three 3D
ICINCO 2006 - ROBOTICS AND AUTOMATION
144

points whose projections onto the image plane belong
to P
i
(and P
c
). The plane Π is given by the vector
π
T
= [n
∗
d
∗
] in the frame F
i+1
, where n
∗
is the uni-
tary normal of Π in F
i+1
and d
∗
is the distance from
Π to the origin of F
i+1
. It is well known that there is a
projective homography matrix G, relating the image
points of P
i
and P
c
(Hartley and Zisserman, 2000):
α
k
p
ik
= Gp
ck
where α
k
is a positive scaling factor.
Given at least four matched points belonging to Π,
G can be estimated by solving a linear system. If the
plane Π is defined by 3 points, at least five supplemen-
tary points are necessary to estimate the homography
matrix (Hartley and Zisserman, 2000). Assuming that
the camera calibration K is known, the Euclidean ho-
mography of plane Π is estimated as H = K
−1
GK
and it can be decomposed into a rotation matrix and a
rank 1 matrix: H =
i+1
R
c
+
i+1
t
c
n
∗
⊤
d
∗
. As exposed
in (Faugeras and Lustman, 1988), it is possible from
H to determine the camera motion parameters, that is
i+1
R
c
and
i+1
t
c
d
∗
. The normal vector n
∗
can also be
determined, but the results are better if n
∗
has been
previously well estimated (note that it is the case in
indoor navigation with a camera looking at the ceil-
ing for instance). In our case, the mobile robot is sup-
posed to move on a perfect ground plane. Then an
estimation of the angular deviation γ between F
c
and
F
i+1
can be directly extracted from
i+1
R
c
. Further-
more, we can get out from
i+1
t
c
d
∗
the lateral deviation
z up to a scale factor between the origin of F
c
and a
straight line Γ (refer to Figure 9).
As a consequence, the control problem can be for-
mulated as following Γ in regulating to zero z and γ
before the origin of F
c
reaches the origin of F
i+1
3.4 Control Law
Exact linearization of nonlinear models of wheeled
mobile robot under the assumption of rolling without
slipping is a well known theory, which has already
been applied in many vehicle guidance applications,
as in (Thuilot et al., 2002) for a car-like vehicle, and
in our previous works (see [**]). The used state vec-
tor of the robot is Z = [
c z γ
]
⊤
, where c is the
curvilinear coordinate of a point M, which is the or-
thogonal projection of the origin of F
c
on Γ. The
derivative of this state give the following state space
model:
˙c = V cos γ; ˙z = V sin γ; ˙γ = ω
c
(6)
The state space model (6) is converted into a chained
system of dimension 3 [
a
1
a
2
a
3
]
⊤
. Deriving
this system with respect to a
1
gives an almost linear
system. By choosing a
1
= c and a
2
= z, and thanks
to classical linear automatics, it is then possible to
design an asymptotically stable guidance control law,
which performances are theoretically independent to
the longitudinal velocity V :
ω(z, γ) = −V cos
3
γK
p
z − |V cos
3
γ|K
d
tan γ (7)
K
p
and K
d
are gains which set the performances of
the control law. They must be positive for the control
law stability. Their choice determine a settling dis-
tance for the control, i. e. the impulse response of z
with respect to the covered distance by the point M
on Γ.
4 EXPERIMENTAL EVALUATION
4.1 Pattern Tracker Evaluation
The evaluation of the tracker was done by superim-
posing an image patch (pattern) with known state vec-
tor trajectory on a cluttered background image se-
quence. The goal was to analyse the accuracy of the
tracker with respect to the pattern displacement mag-
nitude. The number of particles was set to 200 and the
standard deviations of the evolution model parameters
were σ
x
= 5 pixels, σ
y
= 5 pixels, σ
φ
= 3 degrees,
σ
s
= 0.1. Figure 10 shows displacements and scale
variations estimated by the tracker with respect to the
ground truth values. It can be noticed that the tracker
remains accurate inside [−3σ, +3σ].
−30 −20 −10 0 10 20 30
−20
−10
0
10
20
dX (ground truth)
estimated dX
−30 −20 −10 0 10 20 30
−20
−10
0
10
20
dY (ground truth)
estimated dY
−15 −10 −5 0 5 10 15
−10
−5
0
5
10
dtheta (ground truth)
estimated dtheta
0.5 1 1.5
0.5
1
1.5
scale (ground truth)
estimated scale
Figure 10: State vector variation estimates (dX and dY in
pixels and dtheta in degrees) with respect to real variation
values (The straight line represents the ideal curve).
4.2 A Navigation Task
The proposed framework is implemented on a
Pekee
TM
robot which is controlled from an external
PC. A small 1/3” CMOS camera is embedded on the
robot and looks at the ceiling which is generally a
PATTERN TRACKING AND VISUAL SERVOING FOR INDOOR MOBILE ROBOT ENVIRONMENT MAPPING
AND AUTONOMOUS NAVIGATION
145

plane parallel to the ground. Then, it is quite easy to
give a good approximation of the normal vector n
∗
to
the reference plane Π in order to evaluate an homog-
raphy. If the camera frame is confounded with the ro-
bot frame F
c
, we can assume that n
∗
= [
0 0 1
].
The displacement between F
i+1
and F
c
only consists
of one rotation γZ
c
and two translations t
Xc
X
c
and
t
Y c
Y
c
. Therefore, H has only three degrees of free-
dom. Only two points lying on Π and matched in I
i+1
and I
c
are theoretically necessary to estimate H. The
angular deviation γ and the lateral deviation z with re-
spect to Γ can be estimated directly from the compu-
tation of H. The Figure 12 illustrates the evolution of
planar patterns tracked during the robot motion along
a given visual route. These tracked planar patterns
have been extracted while the user was creating a vi-
sual path which is included into the visual route to be
followed.
At the first step of an autonomous run, the current
camera image has to be located into the visual mem-
ory. The tracking of learnt planar pattern in this image
is then automatic. As a consequence, the user must
Figure 11: Following a visual route: the previously learnt
visual path, about 10m long, is materialized on the ground.
The pictures were taken during an autonomous run.
(1) [...] (2)
(3) (4) (5)
Figure 12: Evolution of the image when the robot is regu-
lated between two consecutive key image : in each image,
the yellow square is the current state of the tracker, the red
one is the state to reach. The image (3) is considered close
enough to the key image: the control has succeeded. At im-
age (4), a new reference state to reach is then provided to
the control law.
have chosen at least one reference attitude of the ro-
bot which has to be associated with one key image. If
the robot has ever achieved a mission since it has been
started up, the current image is already supposed to
be closed to a key image. At each frame, the tracker
provides the coordinates of a current tracked planar
pattern. H is then computed thanks to the knowledge
of this pattern in the key image to reach I
i+1
. A key
image is assumed to be reached when a distance be-
tween the current points coordinates and the desired
one goes under a fixed threshold. The reference path,
which is represented on the Figure 11 by the white
squares which are lying on the ground, has been ac-
quired as a visual route of fifteen key images. The
corresponding path length is about 10m. The longi-
tudinal velocity V was fixed to 0.2m.s
−1
. When the
robot stops at the end of the visual route, the final er-
rors in the image corresponds to a positioning error
around 5cm and an angular error about 3
◦
. Neverthe-
less, note that the robot has been stopped roughly, by
setting V to zero since the last key image of the vi-
sual route has been detected. Moreover, both camera
intrinsic and hand-eye parameters has been roughly
determined. The positioning accuracy depends above
all on the threshold which determines if a key image
is reached. Our future works will improve that point.
5 CONCLUSION
An efficient particle filter tracker with specific obser-
vation probability densities was designed to track pla-
nar modelled patterns on cluttered background. Scale
changing and partial occlusions were taken into ac-
count. The obtained algorithm runs in near real time
rate and is accurate and robust in realistic conditions
according to experimental validation. The tracker
was used for autonomous indoor environment map-
ping and image-based navigation. Visual route is per-
formed thanks to a visual-servoing control law, which
is adapted to the robot nonholonomy. Experimental
results confirm the validity of the approach. Future
works will deal with the adaptation of the tracker to
3D movement tracking using homographies in order
to enable autonomous mapping of 3D indoor environ-
ment using planar patterns detected on the walls.
REFERENCES
Arulampalam, S., Maskell, S., Gordon, N., and Clapp, T.
(2002). A tutorial on particle filters for on-line non-
linear/non-gaussian bayesian tracking. IEEE Trans.
on Signal Processing, 50:174–188.
Bascle, B., Bouthemy, P., Deriche, R., and Meyer, F. (1994).
Tracking complex primitives in an image sequence. In
ICINCO 2006 - ROBOTICS AND AUTOMATION
146

In Proc. of the 12th int. Conf. on Pattern Recognition,
pages 426–431.
Black, M. and Jepson, A. (1996). Eigentracking: robust
matching and tracking of articulated objects using
a view-based representation. In In Proc. European
Conf. on Computer Vision, pages 329–42.
Blake, A., Curwen, R., and Zisserman, A. A. (1993). A
framework for spatiotemporal control in the tracking
of visual contours. Int. J. Computer Vision, 11:127–
145.
Chen, J., Dixon, W. E., Dawson, D. M., and McIntire, M.
(2003). Homography-based visual servo tracking con-
trol of a wheeled mobile robot. In Proceeding of the
2003 IEEE/RSJ Intl. Conference on Intelligent Robots
and Systems, pages 1814–1819, Las Vegas, Nevada.
Fang, Y., Dawson, D., Dixon, W., and de Queiroz,
M. (2002). Homography-based visual servoing of
wheeled mobile robots. In Conference on Decision
and Control, pages 2866–2871, Las Vegas, NV.
Faugeras, O. and Lustman, F. (1988). Motion and structure
from motion in a piecewise planar environment. Int.
Journal of Pattern Recognition and Artificial Intelli-
gence, 2(3):485–508.
Hartley, R. and Zisserman, A. (2000). Multiple View Geom-
etry in Computer Vision. Cambridge University Press.
Hayet, J. (2003). Contribution
`
a la navigation d’un robot
mobile sur amers visuels textur
´
es dans un environ-
nement structur
´
e. PhD thesis, Universit Paul Sabatier,
Toulouse.
Isard, M. and Blake, A. (1998). Condensation-conditional
density propagation for visual tracking. Int. J. Com-
puter Vision, 29:5–28.
Jurie, F. and Dhome, M. (2001). Real-time template match-
ing: an efficient approach. In In the 12th Int. Conf. on
Computer Vision, Vancouver.
Kass, M., Witkin, A., and Terzopoulos, D. (1988). Snakes:
active contours. Int. J. Computer Vision, 1:321–331.
Lowe, D. (1992). Robust model-based motion tracking
through the integration of search and estimation. Int.
J. Computer Vision, 8:113–122.
Ma, Y., Kosecka, J., and Sastry, S. S. (1999). Vision guided
navigation for a nonholonomic mobile robot. IEEE
Transactions on Robotics and Automation, pages 521–
37.
Malis, E., Chaumette, F., and Boudet, S. (1999). 2 1/2 d
visual servoing. IEEE Transactions on Robotics and
Automation, 15(2):238–250.
Marchand, E., Bouthemy, P., Chaumette, F., and Moreau, V.
(1999). Robust real-time visual tracking using a 2d-3d
model-based approach. In In Proc. IEEE Int. Conf. on
Computer Vision, ICCV’99, pages 262–268, Kerkira,
Greece.
Pece, A. E. C. and Worrall, A. D. (2002). Tracking with
the em contour algorithm. In In Proc. of the European
Conf. on Computer Vision, pages 3–17, Copenhagen,
Danemark.
Samson, C. (1995). Control of chained systems. applica-
tion to path following and time-varying stabilization
of mobile robots. IEEE Transactions on Automatic
Control, 40(1):64–77.
Se, S., Lowe, D., and Little, J. (2001). Vision-based mobile
robot localization and mapping using scale invariant
features. In Int. Conference on Robotics and Automa-
tion (ICRA’01).
Talluri, R. and Aggarwal, J. (1996). Mobile robot self-
location using model-image feature correspondence.
IEEE Trans. on Robotics and Automation, 12(1):63–
77.
Thuilot, B., Cariou, C., Martinet, P., and Berducat, M.
(2002). Automatic guidance of a farm tractor relying
on a single cp-dgps. Autonomous Robots, 13:53–71.
Tsakiris, D., Rives, P., and Samson, C. (1998). Extend-
ing visual servoing techniques to nonholonomic mo-
bile robots. In D. Kriegman, G. H. and Morse, A., ed-
itors, The Confluence of Vision and Control, volume
237 of LNCIS, pages 106–117. Springer Verlag.
Zhong, Y., Jain, A. K., and Dubuisson, M. P. (2000). Object
tracking using deformable templates. IEEE Trans. on
Pattern Analysis and Machine Intelligence, 22:544–
549.
PATTERN TRACKING AND VISUAL SERVOING FOR INDOOR MOBILE ROBOT ENVIRONMENT MAPPING
AND AUTONOMOUS NAVIGATION
147
