
A NOVEL HAPTIC INTERFACE FOR FREE LOCOMOTION
IN EXTENDED RANGE TELEPRESENCE SCENARIOS
Patrick R
¨
oßler, Timothy Armstrong, Oliver Hessel, Michael Mende and Uwe D. Hanebeck
Intelligent Sensor-Actuator-Systems Laboratory
Institute of Computer Science and Engineering
Universit
¨
at Karlsruhe (TH)
Karlsruhe, Germany
Keywords:
Extended range telepresence, haptic interface, motion compression.
Abstract:
Telepresence gives a user the impression of actually being present in a distant environment. A mobile teleop-
erator acts as a proxy in this target environment, replicates the user’s motion, and records sensory information,
which is transferred to the user and displayed in real-time. As a result the user is immersed in the target envi-
ronment. The user can then control the teleoperator by walking naturally. Motion Compression, a nonlinear
mapping between the user’s and the robot’s motion, allows exploration of large target environments even from
small user environments.
For manipulation tasks haptic feedback is important. However, current haptic displays do not allow wide-area
motion. In this work we present our design of a novel haptic display for simultaneous wide area motion and
haptic interaction.
1 INTRODUCTION
Telepresence aims at giving a human user the impres-
sion of actually being present in a remote environ-
ment, the target environment. In order to achieve this,
a robot, the teleoperator, typically a wheel based plat-
form equipped with a camera head, is placed in the
target environment. Optionally, the teleoperator may
be equipped with a manipulator arm.
In order to control the robot, the user’s head mo-
tion is tracked and transferred to the teleoperator that
replicates this motion. The teleoperator records sen-
sory information and sends it to the human user in
real time. This information is displayed to the user on
immersive displays, e. g. a head-mounted display for
video and headphones for audio, in such a way that
the user only perceives the target environment. As a
result, the user is immersed in the target environment,
i. e., he feels present.
The more of the user’s senses are telepresent the
deeper he gets immersed in the target environment.
Fig. 1 shows the senses most important for telepres-
ence. Since proprioception, the sense of self mo-
tion, is especially important for human navigation
and wayfinding (Bakker et al., 1998), extended range
telepresence allows the user to navigate the tele-
operator by natural walking, rather than using de-
visual
h
aptic
proprioceptive
auditive
Figure 1: Senses of interest in telepresence. The photo
shows the setup used in (R
¨
oßler et al., 2005b).
vices like joysticks (Stemmer et al., 2004) or steering
wheels (Bunz et al., 2004).
The target environment may be of arbitrary size,
but the user’s real environment, the user environment,
is typically limited, for example by the range of the
tracking system or the available space. In order to al-
low the user to explore target environments that are
larger than the user environment, additional process-
ing of his motion data is needed. Motion Compres-
sion (Nitzsche et al., 2004) provides a nonlinear map-
148
Rößler P., Armstrong T., Hessel O., Mende M. and D. Hanebeck U. (2006).
A NOVEL HAPTIC INTERFACE FOR FREE LOCOMOTION IN EXTENDED RANGE TELEPRESENCE SCENARIOS.
In Proceedings of the Third International Conference on Informatics in Control, Automation and Robotics, pages 148-153
DOI: 10.5220/0001214101480153
Copyright
c
SciTePress

ping between the path in the user environment and the
path in the target environment. It guarantees a high
degree of immersion by providing almost consistent
proprioceptive and visual feedback.
A system such as the one described above al-
lows telepresent exploration of large target environ-
ments (R
¨
oßler et al., 2005b). However, in order to
be able to perform manipulation tasks in the target
environment, haptic feedback is needed.
Haptic feedback can be achieved by implement-
ing a robotic system, that applies forces on the hu-
man user, e. g. his hand. Most current haptic inter-
faces like the commercially available Phantom (Sens-
Able Technologies, 1996) use classic serial kinemat-
ics. Even industrial robots are sometimes used as
haptic interfaces (Hoogen and Schmidt, 2001).
Besides these classical approaches there is also
a group of interfaces based on completely differ-
ent principals, like for example magnetic levita-
tion (Unger et al., 2004). Common to all such sys-
tems is a very limited work space. Therefore, they are
not suited for extended range telepresence, where the
user needs to move freely in the user environment.
One approach to solving the problem of simulta-
neous haptic interaction and wide are motion are un-
grounded haptic displays, e. g. exoskeletons (Berga-
masco et al., 1994), which are carried along by the
user. However, with these devices haptic rendering
is of significantly lower quality than with grounded
displays (Richard and Cutkosky, 1997).
As various applications need large haptic inter-
faces, there are a number of different approaches fit-
ted for each application. Some of these displays how-
ever, only extend the height of the work space (Borro
et al., 2004). Some translatory motion in the user en-
vironment is allowed by a system based on a wire
pull mechanism (Bouguila et al., 2000). However,
rotational motion is highly restricted as the user gets
caught in the wires. Hyper-redundant serial kinemat-
ics (Ueberle et al., 2003) feature a large work space
that allows translatory and rotational motion, but still
restrict free motion in the user environment.
The only group of systems that allows haptic in-
teraction during wide area motion are mobile haptic
interfaces (Nitzsche and Schmidt, 2004). These are
typically small conventional haptic devices mounted
on mobile platforms. However, they are hard to
control and display quality is heavily dependent on
localization of the mobile platform.
In this paper we present our patent pending design
of a large haptic interface that allows simultaneous
haptic interaction and wide area motion. The design
of the system provides a high degree of stiffness and
makes it fairly easy to control. Although especially
designed for use in systems with Motion Compres-
sion, it is more general and opens a wide variety of ap-
plications besides robot teleoperation, for example in
virtual reality or entertainment (R
¨
oßler et al., 2005a).
The remainder of this paper is structured as fol-
lows. In Sec. 2 we review Motion Compression, as
this algorithm heavily affects the requirements to the
haptic display described in Sec. 3. The mechanical
setup of the display is given in Sec. 4 along with
its kinematic properties. Sec. 5 describes the dis-
tributed electronic control system, which was devel-
oped to control this large robotic system with many
sensor/actuator subsystems. The safety architecture
necessary for safe operation of such a system is pre-
sented in Sec. 6. Finally, Sec. 7 draws conclusions
and discusses future work.
2 MOTION COMPRESSION
Motion Compression is an algorithmic framework
that provides a nonlinear transformation between the
user’s path in the user environment and the mo-
bile teleoperator’s path in the target environment. It
consists of three modules as shown in Fig. 2.
path
trans-
formation
user
guidance
path
prediction
U
T
user
p
osition
transforme
d
position
Figure 2: Overview of the Motion Compression Frame-
work.
Path prediction tries to predict the desired path of
the user in the target environment. This prediction is
based on tracking data and, if available, information
on the target environment. The resulting path is called
target path.
In the next step, path transformation, the target
path is transformed in such a way that it fits in the user
environment. The transformed path features the same
length and turning angles, while path curvature dif-
fers. The resulting user path minimizes this path cur-
vature difference. A target path and a corresponding
user path are shown in Fig. 3.
A NOVEL HAPTIC INTERFACE FOR FREE LOCOMOTION IN EXTENDED RANGE TELEPRESENCE
SCENARIOS
149

Finally, the user guidance module guides the user
on the transformed path, while he has the impression
of walking on the original path. User guidance ex-
ploits some properties of natural human wayfinding.
The result of these three modules is a linear trans-
formation between the user’s position in the user en-
vironment and the teleoperator’s position in the target
environment at any position and time. This transfor-
mation can also be used to transform the user’s hand
position, or to transform force vectors recorded by the
teleoperator back into the user environment.
4 m
4 m
8 m
7 m
(a)
(b)
user environment target environment
Figure 3: The corresponding paths in both environments.
(a) User Path in the user environment. (b) Target path in the
target environment.
3 REQUIREMENTS
As a result of using Motion Compression, there arise
requirements for the kinematics of the haptic display.
In order to control the robot by natural walking, the
user needs a work space that covers the whole user
environment of 4 × 4 m
2
, in which he may move with
a natural speed of up to 2 m/s. Especially the rota-
tional motion around the vertical axis must be uncon-
strained and indefinite. To give the user the possibility
of manipulation, the work space should have a height
of at least 2 m.
As this work does focus on haptic sensation during
wide motion and not on precise haptic manipulation,
only forces have to be displayed, the moments are of
lesser importance. Thus the end-effector of the dis-
play needs four degrees of freedom, three translatory
and one rotational around the vertical axis.
A robotic system of the size described above fea-
tures long distances between the sensor/actuator units.
Thus a distributed electronic control system is needed
that allows, for example, decentralized pre-processing
of sensor data. These decentralized units have to be
connected to a central control unit by means of a bus
system that allows high bandwidth and a high number
of sensor/actuator subsystems.
As the user will be in direct contact with a robotic
system moving at high speeds, a safety architecture
that reduces the danger of physical harm to a min-
imum is needed. This is even more important, as
the user is immersed in the remote environment and
does not see the haptic display itself. In case of
malfunction of any part of the system, all subsys-
tems, especially all moving parts, immediately have
to stop.
4 MECHANICAL SETUP
Fine haptic rendering and wide area motion require
very different characteristics regarding mechanics as
well as control. This is why we decided to follow the
idea of mobile haptic interfaces and separate the hap-
tic display device from wide area motion. The motion
subsystem is realized as portal carrier system with
three linear degrees of freedom, that moves the hap-
tic end-effector along with the user. The haptic end-
effector is realized as a parallel SCARA manipulator.
Fig. 4 gives an impression of the complete setup.
Figure 4: An impression of the complete setup with portal
carrier and parallel SCARA manipulator.
4.1 Portal Carrier
In order to provide the desired work space, the portal
carrier has a size of approximately 5 × 5 × 2 m
3
. It
has three translatory degrees of freedom, which are
realized by three independent linear drives.
These linear drives are built using a commercially
available carriage-on-rail system. The carriages are
driven by a toothed belt. While the x- and y-axis con-
sist of two parallel rails each for stability reasons, the
z-axis is only a single rail. As a result, the system
is driven by five three-phase AC-motors, that allow
a maximum speed of 2 m/s and an acceleration of
2 m/s
2
. As the configuration space equals cartesian
space, forward kinematics can be expressed by means
ICINCO 2006 - ROBOTICS AND AUTOMATION
150
of an identity matrix. Thus control is extremely easy
to handle and very robust.
4.2 Parallel SCARA
The acceleration of the human hand is typically much
higher than the acceleration of the portal carrier.
In order to allow natural hand motion, a fast and
lightweight kinematic is attached to the carriage of the
z-axis. A two degree of freedom SCARA kinematic
parallel to the x-y-plane is sufficient, as motion in z-
direction is of minor importance. A SCARA kine-
matic covers planar motion, which can be described
by means of polar coordinates.
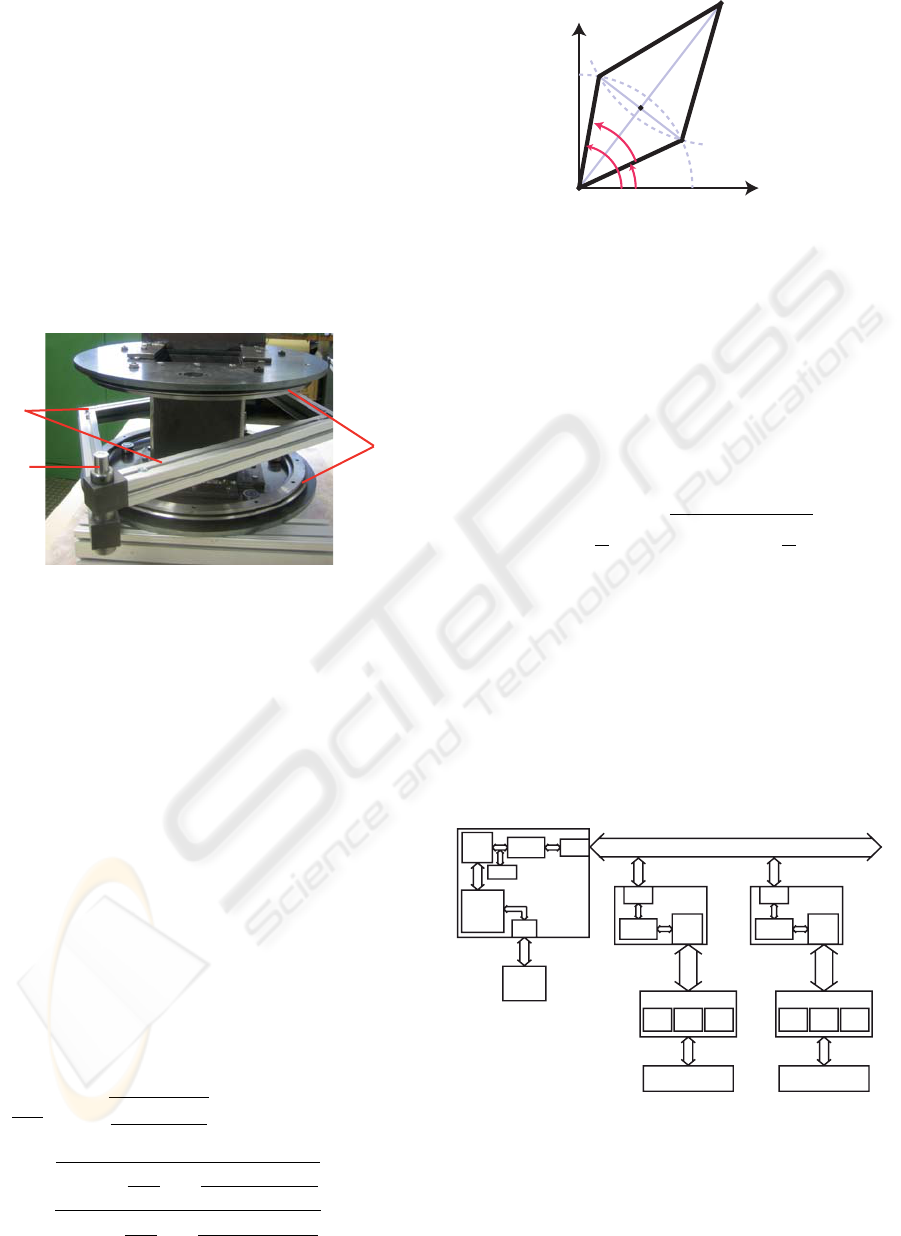
outer
segments
end
effector
circula
r
drives
Figure 5: The parallel SCARA. The inner segments are re-
placed by circular drives. Work space was optimized by
adding an additional angle to the outer segments.
We designed a parallel SCARA manipulator, which
has the advantage, that both motors needed to drive
the system can be integrated into the base. As a result,
all moving joints are passive. This leads to a mini-
mum of moving mass and thus better dynamics. In
order to allow infinite circular motion, the inner seg-
ments have been replaced by circular drives, as shown
in Fig. 5.
Although parallel SCARA devices have been used
as haptic interfaces before (Campion et al., 2005), our
approach is novel as the circular drives significantly
reduce the complexity of the forward kinematics as
both inner segments have their origin in exactly the
same location.
The forward kinematics of the parallel SCARA are
given as in Fig. 6, A, B and C are passive joints.
Only the angles α and β are actively driven. The
end-effector position C is given by
OC =
"
l
1
cos(α)+cos(β)
2
l
1
sin(α)+sin(β)
2
#
+
r
l
2
2
cos
2
α+β
2
−
(sin(α)+sin(β))
2
4
r
l
2
2
sin
2
α+β
2
−
(cos(α)+cos(β))
2
4
,
(1)
α
ψ
β
O
A
C
B
x
y
Figure 6: Kinematics of the parallel SCARA.
where l
1
< l
2
are the lengths of the inner and outer
segments, respectively.
When attaching the parallel SCARA to the portal
carrier, there is a redundancy that may be resolved
by optimizing manipulability of the SCARA robot.
The SCARA robot’s manipulability is optimal when
its radial travel is in center position. The SCARA
robot’s radial travel R is only dependent on the angle
ψ = β − α and is given as
R = l
1
cos
ψ
2
+
s
l
2
2
− l
2
1
sin
2
ψ
2
. (2)
5 DISTRIBUTED ELECTRONICS
In order to control the haptic display at a high update
rate, we designed a distributed electronic control sys-
tem. This electronic system is not limited to control
of the haptic display described in this paper, but it is
modular and reconfigurable and can thus be fitted to
any robotic system.
PC
Profibus
Master
µC
DSP
USB
SPI
ASPC2 RS485
SRAM
Slave
µC
SPC3
Extension
ADC
OP
...
Sensor/Actuator
RS485
Slave
µC
SPC3
Extension
ADC
OP
...
Sensor/Actuator
RS485
...
Figure 7: Structure of the control system.
As shown in Fig. 7 the control system consists
of one master control node equipped with high pro-
cessing power and a number of slave nodes, one for
each sensor/actuator subsystem. These nodes are
A NOVEL HAPTIC INTERFACE FOR FREE LOCOMOTION IN EXTENDED RANGE TELEPRESENCE
SCENARIOS
151
connected with PROFIBUS
1
, which provides high
bandwidth over long distances.
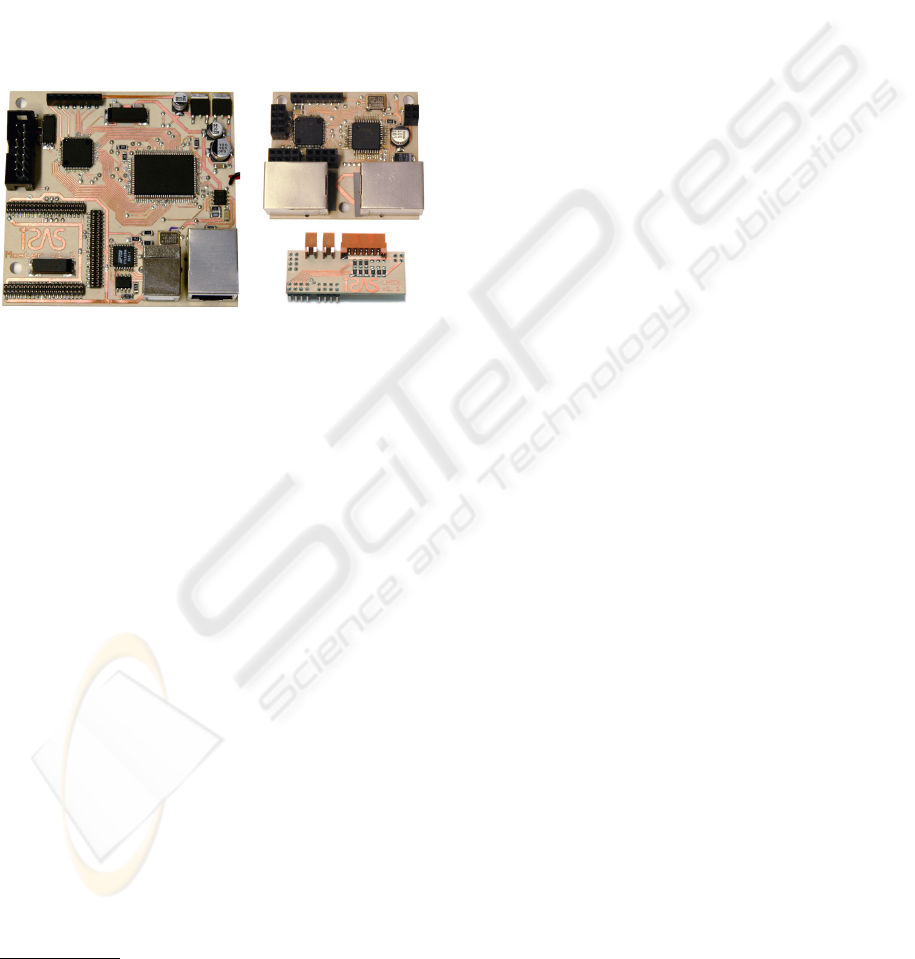
The master node shown in Fig. 8 on the left is
equipped with an AD Blackfin DSP
2
header board
(not shown) to provide enough processing power for
control. On this DSP all sensor data is gathered and
control outputs for all actuators are generated. The
DSP is connected via the integrated serial port inter-
face to a TI MSP 430 micro controller
3
, that handles
communication with the slave nodes. To communi-
cate with the core of the telepresence system running
on a standard PC, it also features a USB connection.
Figure 8: The master node (left), a slave node (top right)
and the header board for one sensor (bottom right).
The slave node is a standardized unit, that is com-
pletely the same for all sensor/actuator subsystems.
They are equipped with a TI MSP 430 micro con-
troller, that has enough processing power to pre-
process sensor data or to generate control signals for
the actuator units.
The slave nodes are fitted to their specific task by
adding an extension board, that provides the inter-
faces to the sensors and actuators, and by uploading
the appropriate software. The right hand side of Fig. 8
shows a slave node and one extension board for a
sensor system.
In general, each sensor and each actuator has its
own slave node, because the distances between the
subsystems are very large. However, if a sensor and
the appropriate actuator are close to each other, it is
possible to integrate both sensor pre-processing and
actuator control on one slave node. This is the case
for each of the SCARA robot’s motors. Thus, it
is possible to run inner control loops on these slave
nodes.
1
http://www.profibus.com/pb/
2
http://www.analog.com/processors/processors/blackfin/
3
http://www.ti.com/
6 SAFETY ARCHITECTURE
In order to prevent accidents when using the haptic
interface a safety architecture was designed and im-
plemented. This safety architecture consists of three
levels to include various sources of failure.
The highest level is the external level. This level al-
lows user inputs by means of emergency buttons and
a dead-man-switch at the end-effector. This level also
includes mechanical stop switches that prevent the
system from destruction in case of a failure. If the ex-
ternal level detects a failure, it triggers the emergency
stop program of all actuators and cycles down power.
As the motors of the portal carrier have integrated
power-off brakes, the system stops immediately.
On the inter-node level the nodes of the control sys-
tem monitor each other. The master node constantly
checks the alive status of all slave nodes based on
timeouts. If any one of the nodes does not respond to
the queries in time, an emergency stop is initiated. In
order to also guarantee an emergency stop in case of
a master failure, the actuator nodes stop the actuators
immediately if the master node does not constantly
refresh its commands.
On the intra-node level the components of each
node monitor themselves and each other using their
internal watchdog timers. In case of a malfunction,
the node is stopped. This leads to a time-out on
the inter-node level and eventually to an emergency
stop.
7 CONCLUSIONS
In this paper we have presented our patent pending
design of a novel haptic interface. This interface al-
lows simultaneous wide area motion and haptic inter-
action. It consists of a parallel SCARA manipulator
for precise haptic rendering and a portal carrier sys-
tem that enlarges the work space to 4 × 4 × 2 m
3
by
pre-positioning the end-effector. As the portal carrier
is driven by three linear drives, description of the sys-
tems kinematics is very simple. This makes it easy
and robust to control.
We designed a distributed electronic control sys-
tem based on Profibus that allows decentralized pre-
processing of sensor data and control of actuators. A
safety architecture that prevents accidents in case of
malfunctions was implemented on the control system.
Although all components were developed specifi-
cally as extension to our extended range telepresence
system, the concepts presented here are much more
general and are not limited to the given application.
Future work will, of course, include finishing the
setup of the hardware. While all components already
exist, there is still some integration to be done. To
ICINCO 2006 - ROBOTICS AND AUTOMATION
152

prove the suitability of the concept, we will imple-
ment an impedance controller that allows haptic in-
teraction with virtual environments. The envisaged
controller will be based on decoupling haptic render-
ing and wide area motion by optimizing manipulabil-
ity of the the haptic interface (Formaglio et al., 2005).
However, in order to achieve the goal of telepresent
manipulation with a real robotic teleoperator, more
sophisticated control schemes might be necessary.
By adding haptics to our extended range telepres-
ence system, all senses of interest will finally be telep-
resent. While users see and hear in the target environ-
ment, they receive proprioceptive feedback of their
motion and have the possibility of haptic interaction
during wide area motion. Thus the user is deeply
immersed in the target environment and eventually
identifies with the teleoperator.
This will lead to a new quality in robot teleopera-
tion as users now have a truly intuitive interface to the
robot and can fully focus on their task in the target
environment.
ACKNOWLEDGEMENTS
This work was supported in part by the German Re-
search Foundation (DFG) within the Collaborative
Research Center SFB 588 on “Humanoid robots–
learning and cooperating multimodal robots”.
REFERENCES
Bakker, N. H., Werkhoven, P. J., and Passenier, P. O. (1998).
Aiding Orientation Performance in Virtual Environ-
ments with Proprioceptive Feedback. In Proceedings
of the IEEE Virtual Reality Annual Intl. Symposium,
pages 28–33, Atlanta, GA, USA.
Bergamasco, M., Allotta, B., Bosio, L., Ferretti, L., Per-
rini, G., Prisco, G. M., Salsedo, F., and Sartini, G.
(1994). An Arm Exoskeleton System for Teleoper-
ation and Virtual Environment Applications. In Pro-
ceedings of the IEEE Intl. Conference on Robotics and
Automation (ICRA’94), pages 1449–1454, San Diego,
CA, USA.
Borro, D., Savall, J., Amundarain, A., Gil, J. J., Garc
´
ıa-
Alonso, A., and Matey, L. (2004). A Large Hap-
tic Device for Aircraft Engine Maintainability. IEEE
Computer Graphics and Applications, 24(6):70–74.
Bouguila, L., Ishii, M., and Sato, M. (2000). Multi-Modal
Haptic Device for Large-Scale Virtual Environment.
In Proceedings of the 8th ACM Intl. Conference on
Multimedia, pages 277–283, Los Angeles, CA, USA.
Bunz, C., Deflorian, M., Hofer, C., Laquai, F., Rungger, M.,
Freyberger, F., and Buss, M. (2004). Development
of an Affordable Mobile Robot for Teleexploration.
In Proceedings of IEEE Mechatronics & Robotics
(MechRob’04), pages 865–870, Aachen, Germany.
Campion, G., Wang, Q., and Hayward, V. (2005). The Pan-
tograph Mk-II: A Haptic Instrument. In Proceedings
of the IEEE Intl. Conference on Intelligent Robots and
Systems (IROS’05), pages 723–728, Edmonton, AB,
Canada.
Formaglio, A., Giannitrapani, A., Barbagli, F., Franzini, M.,
and Prattichizzo, D. (2005). Performance of Mobile
Haptic Interfaces. In Proc. of the 44th IEEE Con-
ference on Decision and Control and the European
Control Conference 2005, pages 8343–8348, Seville,
Spain.
Hoogen, J. and Schmidt, G. (2001). Experimental Results in
Control of an Industrial Robot Used as a Haptic Inter-
face. In IFAC Telematics Applications in Automation
and Robotics, pages 169–174, Weingarten, Germany.
Nitzsche, N., Hanebeck, U. D., and Schmidt, G. (2004).
Motion Compression for Telepresent Walking in
Large Target Environments. Presence, 13(1):44–60.
Nitzsche, N. and Schmidt, G. (2004). A Mobile H aptic
Interface Mastering a Mobile Teleoperator. In Pro-
ceedings of IEEE/RSJ Intl. Conference on Intelligent
Robots and Systems, Sendai, Japan.
Richard, C. and Cutkosky, M. R. (1997). Contact Force
Perception with an Ungrounded Haptic Interface. In
ASME IMECE 6th Annual Symposium on Haptic In-
terfaces, Dallas, TX, USA.
R
¨
oßler, P., Beutler, F., and Hanebeck, U. D. (2005a). A
Framework for Telepresent Game-Play in Large Vir-
tual Environments. In 2nd Intl. Conference on Infor-
matics in Control, Automation and Robotics (ICINCO
2005), volume 3, pages 150–155, Barcelona, Spain.
R
¨
oßler, P., Beutler, F., Hanebeck, U. D., and Nitzsche,
N. (2005b). Motion Compression Applied to Guid-
ance of a Mobile Teleoperator. In Proceedings of the
IEEE Intl. Conference on Intelligent Robots and Sys-
tems (IROS’05), pages 2495–2500, Edmonton, AB,
Canada.
SensAble Technologies (1996). PHANTOM Hap tic De-
vices. http://www.sensable.com/
products/phantom ghost/phantom.asp.
Stemmer, R., Brockers, R., Dr
¨
ue, S., and Thiem, J. (2004).
Comprehensive Data Acquisition for a Telepresence
Application. In Proceedings of Systems, Man, and Cy-
bernetics, pages 5344–5349, The Hague, The Nether-
lands.
Ueberle, M., Mock, N., and Buss, M. (2003). Towards a
Hyper-Redundant Haptic Display. In Proceedings of
the International Workshop on High-Fidelity Telepres-
ence and Teleaction, jointly with the IEEE Conference
on Humanoid Robots (HUMANOIDS2003), Munich,
Germany.
Unger, B. J., Klatzky, R. L., and Hollis, R. L. (2004). Tele-
operation Mediated through Magnetic Levitation: Re-
cent Results. In Proceedings of IEEE Mechatronics
& Robotics (MechRob’04), Special Session on Telep-
resence and Teleaction, pages 1458–1462, Aachen,
Germany.
A NOVEL HAPTIC INTERFACE FOR FREE LOCOMOTION IN EXTENDED RANGE TELEPRESENCE
SCENARIOS
153
