
HUMAN ARM-LIKE MECHANICAL MANIPULATOR
The Design and Development of a Multi -Arm Mobile Robot for Nuclear
Decommissioning
Mohamed J. Bakari
Engineering Department, Lancaster University, Bailrigg, Lancaster LA1 4YR, UK
Derek W. Seward
Engineering Department, Lancaster University, Bailrigg, Lancaster LA1 4YR, UK
Keywords: Robotics, System Engineer
ing, Nuclear, Decommissioning.
Abstract: This paper reviews the design and development of a human arm-like mechanical manipulator, which is the
basis of research currently being undertaken at Lancaster University, in order to address the complex tasks
found in the rapidly expanding field of nuclear decommissioning. The requirements of multi-arm robot
architecture for use in decommissioning tasks are discussed. The manipulators are integrated to work
cooperatively and perform similar functions to humans in both scale and dexterity. The role that automation
and robotics can play in enabling quicker demolition and at the same time reducing the exposure of workers
to harmful radiation is examined. The key issues surrounding radioactive materials and safe dose levels are
explained. The different stages of a particular system engineering process are outlined together with the
essential physical steps. The paper will conclude by identifying the compliance of the system engineering
used here with the requirements of designing a multi-arm robot.
1 INTRODUCTION
Hundreds of nuclear facilities will come to the end
of their working lives over the next decades and will
require decommissioning. Much of the
decommissioning process utilises well established
demolition techniques, however the overwhelming
complication in the case of the decommissioning of
nuclear facilities is the exposure of workers to
radiation. The primary use of robotics in
decommissioning applications is to reduce the
radioactivity dose levels to which workers are
exposed. Nearly all Deactivation &
Decommissioning (D&D) activities that are too
hazardous for direct human contact are presently
executed using robotic systems; however many of
these systems are custom-designed for specific
projects and hence expensive, often unreliable and
limited (IAEA, 2001). The purpose of the research
being undertaken at Lancaster University is to
develop a generic tool that can be used for a wide
range of decommissioning tasks. The importance of
multi-arm robots has been noted by many
researchers (Cox,1995; Miyabe, 2004; Alford, 1984)
in the past two decades who have pointed out the
advantages of such robots as compared to the
“handicapped” single-arm robots. There is indeed a
real desire for such systems in decommissioning
robotics, undersea robotics and space robotics. For
example, manipulating flexible objects or fixtureless
assembly (Cox, 1995). A multi-arm robot has the
ability to perform two distinct operations
simultaneously or separately, they also have the
ability to perform the same processing operation in a
coordinated manner or share the task such as holding
and cutting an object (Miyabe, 2004). Cecil Alford
(1984) presents a case study of material handling by
two robot arms.
2 MULTI-ARM MANIPULATOR
SYSTEM
There has not been much research to date that has
reported on the simultaneous utilization of a multi-
arm robot configured on the basis of the size and
168
J. Bakari M. and W. Seward D. (2006).
HUMAN ARM-LIKE MECHANICAL MANIPULATOR - The Design and Development of a Multi -Arm Mobile Robot for Nuclear Decommissioning.
In Proceedings of the Third International Conference on Informatics in Control, Automation and Robotics, pages 168-175
DOI: 10.5220/0001214501680175
Copyright
c
SciTePress

relationship between two human arms, deployed
from a remote vehicle with a manipulator. Previous
studies concerning multi-arm robot systems have
been deployed by either a rigid boom overhead
transporter or by a crane rather than a remote
vehicle. I have given below two examples of these
forms of multi-arm robot systems: DAWM (Noakes,
1999) is a multi-arm robot platform equipped with
two schilling Titan II or Titan T hydraulic
manipulators and mounted to a 5-DOF base.
DAWM as shown in Figure 1, was developed at Oak
Ridge National Laboratory (ORNL) by the Robotics
Development Program (RTDP) as a development
test bed to study issues related to dual arm
manipulation, including platform configuration,
control, automation, operations, and tooling. These
activities were conducted under the Deactivation and
Decommissioning (D&D) Focus Area robotics
product line.
Figure 1: DAWM with Titan II and Titan T manipulators.
RODDIN multi-arm robot system is a crane-
deployed work platform and is equipped with two
hydraulic manipulators (SAMM or MAESTRO).
RODDIN as shown in Figure 2, was developed by
CYBERNETIX and it is used for pipe and metal
cutting in decommissioning.
Figure 2: RODDIN with Maestro manipulators.
Neither of the multi-arm robot system manipulators
described above is based on human-scale size or
dexterity, they are also not light weight.
In the research being undertaken at Lancaster
University we are focusing on the development of a
multi-arm robot system based on human-scale size
manipulators which can be deployed by a remote
vehicle. The focus on the development of human-
scale size manipulators is to undertake pipe-cutting
decommissioning tasks; reconfigure the system for
other necessary decommissioning tasks, such as
dismantling; and to use the system in small restricted
spaces that are too dangerous for humans, or in
which a bigger manipulator could not be deployed.
Because of radiation hazards there are specific
requirement for a robot to fulfil in order to undertake
decommissioning tasks. A reconfigurable, multi-arm
robot system needs to have the following operational
features (Cox, 1999).
Titan
T
Operational features:
Titan II
• Human scale reach and dexterity
• Force control
• Obstacle and collision avoidance
• Remote teleoperated control (both
manipulators)
• Cooperative manipulator ability
• High reliability
It is widely believed that human scale and
dexterity can satisfy many situations occurring in
decommissioning tasks. Operators have the
confidence to know that if a human can accomplish
the task, then the robot can also achieve it. It is also
necessary, however, to consider collision avoidance
and planning strategies which are in themselves
complex processes.
Forces and torques experienced at the end
effectors of robot manipulators should be reflected
back to the human operator at the manual control
station, thus the operator can feel the work in
process. The dynamic behaviour of the end-effector
is one of the most significant characteristics in
evaluating the performance of robot manipulator
systems. Adding force information to robot control
therefore improves robot interaction with the
environment in the presence of uncertainty
(Oussama, 1987).
The goal of collision avoidance is to permit a
robot to work in an obstacle-strewn environment
without damaging itself or any of the obstacles it
encounters. Obstacle avoidance in an obstacle-
strewn environment is needed to assist the operator
of a remote system and help avoid damaging
expensive equipment or, even worse, causing further
contamination of the environment from the
hazardous materials in the decommissioning sites.
HUMAN ARM-LIKE MECHANICAL MANIPULATOR - The Design and Development of a Multi -Arm Mobile Robot
for Nuclear Decommissioning
169

Furthermore, the robot must prohibit self-collision in
the case of a multi-arm robot.
Teleoperation has been successfully applied to
unstructured tasks such as nuclear facility
maintenance, cleanup, underwater operation and
microsurgery (Parker, 1999). A telerobotic system
consists of a human operator, a remote robotic
system, and a human-machine interface. No matter
how good the remote robot is, unless the human-
machine interface is properly designed, the system
will not perform well. A poorly designed human-
machine interface can also introduce mental stress to
the operator that will further deteriorate the system
performance.
Cooperative manipulation is an important
enhancement to robotic capabilities which enables a
multi–arm robot to perform more complex tasks,
manipulate greater payloads, and span a greater
workspace (Dauchez, 1988). The task performed by
cooperating manipulators can be achieved in either
teleoperated, semi-autonomous and, or autonomous
fashion.
An important deciding factor for use of robotics
and automation lies in the reliability of the overall
system. It is given that the robot makes it safer for
the human. Reliability is a serious concern in
hazardous environments. Task plans can be
developed to optimise the safety of the system by
avoiding situations that place components near the
edge of their performance envelopes. Integration of
operational software with fault-tolerance and
condition based maintenance can further enhance the
system reliability.
3 THE ROLE OF AUTOMATION
AND ROBOTICS
The primary use of robotics in decommissioning
applications is to reduce the radioactive dose levels
to which workers are exposed. There are many
situations where, owing to the degree of radiation
and the very long half-lives of the radioactive
materials involved, robotics is the only feasible
option.
Remote cutting for equipment dismantlement is a
common need in the deactivation and
decommissioning community. Where possible,
suited humans are used to complete the cutting, but
there is significant safety, health, and cost issues
involved. Robotic systems have also been used
where radiation levels eliminate the possibility of
using humans; however cost and task completion
time are major issues. A time-efficient, cost-
effective approach to safely complete D&D
operations without the use of humans in the
hazardous environment is a direct need.
The Nuclear Regulatory Commission’s regulation
10 CFR 20 states that an occupational worker cannot
receive more than 50 mSv per year for the full body
dose (NRC), once this dose has been reached the
worker has to stop working immediately. This
necessitates an increased number of workers to be
employed in order to accomplish the necessary task.
By using robots the number of workers is
minimised, this in turn creates many additional
savings including a reduction in the quantity of
protective clothing needed, and a decreased
administration.
4 RADIOACTIVE MATERIALS
AND SAFE DOSE LEVELS
The effect of radiation on the human body is
measured in Sieverts (Sv). The International
Commission on Radiological Protection (ICRP) has
set public dose limits for exposure to radiation; this
is linked to the requirement to keep radiation
exposure as low as possible.
The radiation limits are usually set at 1mSv per year
above background (Burk, 2001). In most countries
the current maximum permissible dose to radiation
workers is 20 mSv a year averaged over 5 years,
with a maximum of 50 mSv in any one year. The
following table indicates the physical effects on
human of excessive exposure to radiation:
Table 1: Health Effects of Nuclear Radiations Doses.
Dose Health Effects
0.5 Sv Possible minor blood changes, no
obvious effect
0.5-1 Sv Radiation sickness, vomiting and
nausea. No death anticipated
4-5 Sv
Radiation sickness more severe. 50%
deaths in 3-8 weeks from infection or
anaemia. Survivors convalesce for
about 6 months
≈ 10 Sv
Vomiting and nausea within 1-2 hrs.
Probably no survivors. Death within
3-5 days following damage to lining
of small intestine
≈ 50 Sv
Tremors, convulsions almost
immediately. All deaths in less than
2 days due to brain damage
Decontamination and decommissioning (D&D)
of all nuclear facilities produces radioactively
contaminated materials. Some of these materials
continue to have economic value because they are in
ICINCO 2006 - ROBOTICS AND AUTOMATION
170

forms that can be recycled or reused. Others will
have little or no economic value and thus constitute
waste that has to be disposed of or stored if no
acceptable method of disposal exists.
The radioactive waste classification and disposal
routes (IAEA, 1994) are as follows:
1. Very low-level waste (VLLW). This waste can be
disposed of in normal landfill sites.
2. Low-level waste (LLW). This waste contains 1%
of the radioactivity but accounts for over 80% of the
volume and is stored in containers at a dedicated
site.
3. Intermediate-level waste (ILW). This waste
contains higher amounts of radioactivity than LLW
and requires shielding. There are no dedicated
facilities in the UK at present, so it is currently
stored on the site of the decommissioning facility in
a specially constructed facility.
4. Higher-level waste (HLW). This waste contains at
least 95% of the radioactivity in radiation waste but
no more than 3% of the volume and requires special
storage with cooling facilities.
In order to illustrate the above proportions of
radioactive waste, 1 tonne of spent fuel from fuel
processing gives rise to 0.1m
3
HLW, 1m
3
ILW and
4m
3
LLW.
5 SYSTEMS ENGINEERING
PROCESS
The systems engineering process, as shown in
Figure 3, derives from the consideration of a specific
concept, and the consequent selection of appropriate
technology. Defining the user requirements is the
first step in the development process using the
system engineering principles and the finished
products should satisfy these requirements (Zied,
2004). The user requirement in this research is the
creation of a robot manipulator with the operational
features of human scale and dexterity.
The system requirements are an intermediate step
between the user requirements and the design stage,
which aim to show what the system is going to do.
In this research, the system requirements derive
from the multi-arm robot configuration which needs
to have the capacity for force control, collision
avoidance, remote controlled, cooperativeness and
high reliability.
The architectural design is the system design that
defines the major components, their arrangements,
decompositions and interrelationships. The human
scale manipulator developed in the research is called
Hydro-Lek which is a six degree of freedom robot
manipulator and consists of six links with a gripper,
four linear actuators and two rotary actuators.
The component development step is the detailed
design of the individual Hydro-Lek manipulator
links including functionalities, interfaces and
layouts. The given information is enough to
manufacture the robot components or to purchase
off-the-shelf components. The manipulator links
then have to be tested, assembled and finally
accepted.
User Requirements
System Requirements
Architectural Design
Component Development
Integration & Verification
Installation & Validation
Operational Capability
System identification
(Office based work)
System creation
(Workshop production)
Operational validation
(Laboratory work)
Figure 3: Sequential development model (Stevens, 1998).
HUMAN ARM-LIKE MECHANICAL MANIPULATOR - The Design and Development of a Multi -Arm Mobile Robot
for Nuclear Decommissioning
171

Wrist Roll
D
Forearm
Roll
A
B
C
Wrist
Pitch
Azimuth
Yaw
Elbow
Pitch
X
Y
Z
Shoulder
Pitch
Figure 4: Hydro-Lek 6 DOF Arm.
Figure 4 above, shows the six joints Hydro-Lek
manipulator layout. Joint one rotates with axis
perpendicular to plane XY. Joint two rotates
perpendicular to joint one. Joint three rotates parallel
to joint two and is offset by the link indicated as A.
Joint four is perpendicular to joint three and is offset
by the link indicated as B. Joint five is perpendicular
to joint four, parallel to joint three and is offset by
the link indicated as C. Joint six is perpendicular to
joint five and is offset by the link indicated as D.
Verification can be performed in two stages. The
first stage is design verification in which the design
is certified against the requirements and it assures
that the product will work properly if it is
manufactured. Computer simulation provides a
means of viewing robot motion to aid in human
perception and decision making for both design and
operation. Interactive software packages that
generate computer animations have found wide
acceptance for programming and simulating
industrial robots. Animated work-cell design
involves graphically placing the robot in its
environment, also called the work-cell.
Machines, tools, parts and any other objects that the
robot manipulators will interact with are also placed
in the workcell. Computer animation is then used to
visually simulate these interactions as the robot
manipulator performs its task. The verification step
in this research was carried out using a CAD/CAM
software package which included Pro/ENGINEER
Wildfire 2.0, used for modelling, modification and
animation of the Hydro-Lek arm components; and
robot simulation software, Workspace 5.04, in order
to assemble and integrate the imported arm
components from the Pro/Engineer software, and
carry out the necessary kinematics simulations by
defining all of the arm joint translations and
orientations.
Table 2 explains the Hydro-Lek manipulator arm
functions.
Table 2: Hydro-Lek arm functions.
Joint Actuator
Function
Type Nom.
Range
1 Azimuth
Yaw
Linear 90
o
2 Shoulder
Pitch
Linear 120
o
3 Elbow
Pitch
Linear 120
o
4 Forearm
Pitch
Rotary 180
o
5 Wrist
Pitch
Linear 180
o
6 Wrist Roll Gerotor 360
o
ICINCO 2006 - ROBOTICS AND AUTOMATION
172
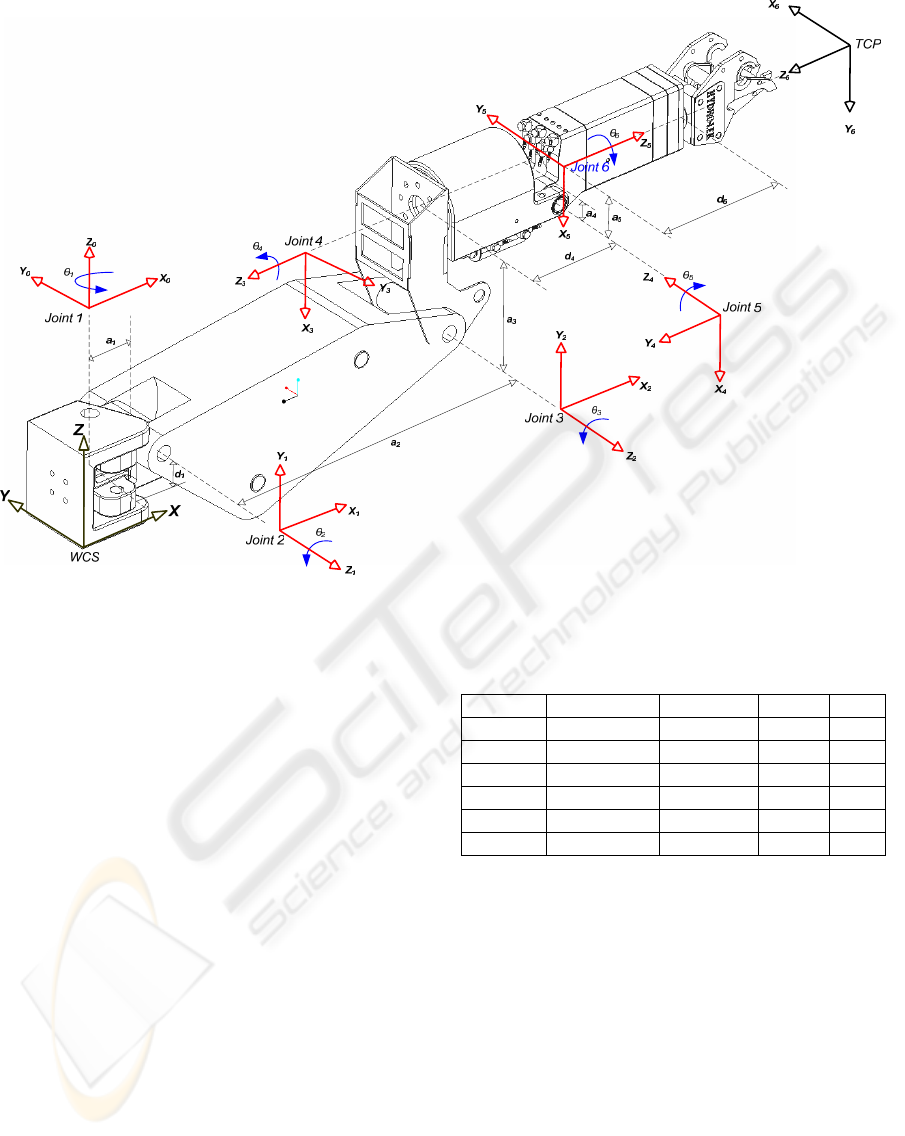
Figure 5: Denavit-Hartenberg Configuration for the Hydro-Lek arm.
Robot manipulators can be considered as a set of
bodies, or links, connected in a kinematic chain by
joints. Each joint of the robot manipulator exhibits
one degree of freedom.
Hydro-Lek manipulator specification:
• Human size arm (900 mm long)
• Approximately 30 kg weight
• 6 function + gripper
• Potentiometer sensor for each joint
• Gripper with force sensor
• Closed loop position control
Both Hydro-Lek manipulators are in the
manufacturing stage, they are due to be delivered in
two months time. Multi-arm configuration will be
set up in order to be mounted to the Brokk 40
friendly mount point.
The Hydro-Lek manipulator structure is
kinematically defined by giving each link four
parameters (d
i
, θ
i
, a
i
and α
i
). The four given
parameters shown in Table 3, describe how to get
from one joint to another. Neighbouring links have a
common joint axis between them.
Table 3: The D-H Parameters.
Joint
θ
i
α
i
a
i
d
i
1 θ
1
90
o
a
1
d
1
2 θ
2
0 a
2
0
3 θ
3
- 90
o
90
o
-a
3
0
4 θ
4
90
o
a
4
-d
4
5 θ
5
90
o
-a
5
0
6 θ
6
+ 90
o
180
o
0 d
6
The distance along the common axis from one link
to the next link is offset d
i
. The amount of rotation
about the common axis between one link and its
neighbour is joint angle θ
i
.
The definition of mechanisms by means of these
four parameters is a convention called Denavit-
Hartenberg (Fu, 1987). The location and orientation
of each joint frame is shown in Figure 5 above. In
this research, the installation step can be conceived
as an integration step within the systems engineering
process. This integration step couples the two
Hydro-Lek manipulators in a test bed in order to
form a multi-arm configuration as shown in Figure
4. A similar project has been undertaken by Daniel
Cox (2004).
HUMAN ARM-LIKE MECHANICAL MANIPULATOR - The Design and Development of a Multi -Arm Mobile Robot
for Nuclear Decommissioning
173

6 THE MULTI-ARM ROBOT
CONFIGURATION
The ongoing research work in robotics at Lancaster
University is concerned with advancing the semi-
autonomous tele-operated robot for D&D tasks.
Figure 6 shows the layout of the two Hydro-Lek
arms. The left arm is a complete arm with a gripper
and the right arm has no gripper but a simple flange
where a cutting tool will be fixed. The purpose of
developing the multi-arm robot in this research work
is for the arms to have the ability to perform two
distinct operations simultaneously or separately. The
decommissioning task considered here is pipe
cutting where the left arm holds a straight pipe while
the right arm cuts it. The left arm then places the cut
piece in a suitable waste disposal vessel.
At this stage of the project, the aim is to attach
the multi-arm robot on to a Brokk 40 friendly mount
point as shown in Figure 7. The primary aim of the
research is to develop intelligence in the robot that is
similar to the cooperation and communication
between the human brain and its two arms; hence the
human arm is adopted as the starting point to
establish the size and functionality of the proposed
system. The next stage of this research work is the
identification and development of hardware and
software systems such as the National Instruments
robotic platform (Lewis, 2004). The NI robotic
platform combines hardware interfacing, stepper or
servo control, trajectory generation, task level
programs, a graphical user interface 3D simulation
and a math library. The NI robotic platform
implements all these components in a homogeneous
architecture that will utilise a single hardware
platform (a standard PC), a C programming
language and an operating system (LabVIEW Real-
Time). This design will lead to a less complex
architecture, easier to use and easier to extend.
Figure 6: Hydro-Lek arms configuration.
Figure 7: Multi-arm mobile robot.
7 CONCLUSION
Nuclear decommissioning provides a particularly
fruitful sector for the advancement of automation
and robotics. Earlier generations of nuclear facility
have now been closed and many are waiting
effective decommissioning. There is a multi-billion
pound world-wide market for companies who have
the skills and technology to engage with the task. In
addition to traditional hazards such as asbestos and
PCBs, the key hazard is obviously the presence of
significant quantities of radioactive waste material.
It is the effective management of this waste which is
the crux of nuclear decommissioning. Many projects
have been successfully completed and valuable
lessons learned. This is a great driver to the further
use of automation and robotics in order to reduce the
radiation dose to which workers are subjected.
This paper has outlined and discussed the design
and development of a human arm-like mechanical
manipulator in order to address the complex tasks
found in the rapidly expanding field of nuclear
decommissioning and the requirements of multi-arm
robot architecture for use in decommissioning tasks.
The stage so far reached is a manufacturing and
integration stage, the next stage of this research will
involve carrying out experimentation in order to
execute pipe cutting tasks.
ACKNOWLEDGEMENTS
The authors are grateful for the support of the
Engineering and Physical Science Research Council
EPSRC.
Hydro-Lek multi-arm
ed test b
Brokk 40 Robot
Left ar
m
Ri
g
ht ar
m
Test be
d
ICINCO 2006 - ROBOTICS AND AUTOMATION
174

REFERENCES
Burk, R. J., 2001. Ionizing Radiation-Safety Standards for
the General Public – Position Statement of the Health
Physics Society [online]. Health Physics Society.
Available from:
http://hps.org/documents/publicdose.pdf [accessed
January 2006]
Brokk 40 robots information [online]. Available from:
http://www.brokk.com/ [accessed February 2006]
Cox, D., Cetin, M., Pryor, M., and Tesar, D., 1999.
Requirements for Modular Dual-Arm Robot
Architecture for Use in Deactivation and
Decommissioning Tasks. ANS 8
th
International
Topical meeting on Robotics and Remote Systems,
9(4), pp. 1-14, American Nuclear Society.
C. O. Alford., and S. M. Belyeu., 1984. Coordinate control
of two robot arms. IEEE International Conference of
Robotics, pp. 468-473.
Cox, J. D., Rackers, K., and Tesar, D., 1995. Cooperative
Manipulation Experiments Using a Dual-Arm Robot.
IEEE Priceedings.
Cox, D., 2004. Cooperative manipulation Testbed
Development-Kinematics. 17
th
Annual Florida
Conference on the Recent Advances in Robotics
(FCRAR), Florida.
Cox, D., 2002. Mock-up of Hazards Material Handling
Taks Using a Dual-Arm Robotic System. Proceedings
5
th
World Automation Congress, Orlando.
Dauchez, P., Fournier, A., and Jourdan, R., 1988. Hybrid
Control of a Two-Arm Robot for Complex Tasks. 2
nd
International Symposium on Robotics and
Manufacturing (ISRAM), New Mexico.
Fu, K.S., Gonzalez, R.C., and Lee, C.S., 1987. Robotics
Control, Sensing, Vision, and Intelligence. Singapore:
McGRAW-HILL.
Hydro-Lek Manipulator information [online]. Available
from:
http://www.hydro-lek.com/ [accessed October
2005]
International Atomic Energy Agency (IAEA), 2001. State
of The Art Technology of Decommissioning and
Dismantling of Nuclear Facilities. Technical Report,
no. 395, Vienna.
International Atomic Energy Agency (IAEA), 2001.
Methods for The Minimization of Radioactive Waste
From Decontamination and Decommissioning of
Nuclear Facilities . Technical Report, no. 401, Vienna.
International Atomic Energy Agency (IAEA),
1994.Classification of Radioactive Waste. A safety
guide, Vienna.
Lewis, F.L., Dawson, D.M., and Abdallah, C.T., 2004.
Robot manipulator Control Theory and Practice, 2
nd
ed. New York: Marcel Dekker.
Measson, Y., David, O., Louveau, F., and Friconneau, J.
P., 2002. Technology and Control For Hydraulic
Manipulator. 22
nd
Symposium on Fusion Technology
(SOFT), Helsinki.
Miyabe, T., Konno, A., Uchiyama, M., and Yamano, M.,
2004. An Approach Toward an Automated Object
Retrieval Operation with a Two-Arm Flexible
Manipulator. The International Journal of Robotics
Research, 23(3), pp. 275-291.
Noakes, M. W., 1999. Dual Arm Work Module
Development and Applications. Proceedings of The
American Nuclear Society Eighth ANS Topical
Meeting on Robotics and Remote Systems, Pittsburgh.
National Instruments product information [online].
Available from: http://www.ni.com/ [accessed January
2006]
Oussama, Khatib., 1987. A unified approach for motion
and force control of robot manipulators: The
operational space formulation. IEEE Journal of
Robotics and Automation, RA-3 (1), pp. 43-53.
Parker, L.E., and Drapper, J.V., 1999. Robotics
Application in Maintenance and Repair, 2nd ed. New
York: Wiley.
RODDIN, Crane-deployed work platform information
[online]. Available from:
http://www.cybernetix.fr/modules.php?&op=modload
&name=cybernetix&file=product&topic=14&bt=nucl
eaire&newlang=eng [accessed November 2005]
Roman, H.T., 1992. Nuclear Plant – Experience and
Future Projections. 40
th
Conference on Remote System
Technology.
SAMM Manipulator information [online]. Available from:
http://www.cybernetix.fr/modules.php?&op=modload
&name=cybernetix&file=product&topic=14&bt=nucl
eaire&newlang=eng [accessed November 2005]
Stevens, R., Brook, P. Jackson., K. and Arnold, S., 1998.
Systems engineering, coping with complexity. London:
Prentice Hall Europe.
Seward, D., 1999. The development of intelligent mobile
robot. Thesis (PhD). Lancaster University.
Titan Manipulators information [online]. Available from:
http://www.sub-atlantic.co.uk/products.html [accessed
March 2006]
U.S. Nuclear Regulatory Commission [online]. Available
from: http://www.nrc.gov/reading-rm/doc-
collections/cfr/part020/ [accessed November 2006]
Zied, Khaled., 2004. Investigation of processes and tools
for rapid development of intelligent robotic systems.
Thesis (PhD). Lancaster University.
HUMAN ARM-LIKE MECHANICAL MANIPULATOR - The Design and Development of a Multi -Arm Mobile Robot
for Nuclear Decommissioning
175
