
DISTRIBUTED CONTROL SYSTEMS BASED ON COTS
COMMUNICATION DATA BUS
Martin S
ˇ
ve´da, Istva´n Szabo´ and Vladimı´r Oplusˇtil
Unis spol. s r.o.
Jundrovska´ 33, Brno, Czech Republic
Keywords:
Distributed control system, COTS data bus, CAN, CANaerospace, mobile robot, avionics.
Abstract:
This paper deals with the distributed commercial off the shelf (COTS) data bus based on Controller Area
Network (CAN) used as a communication data bus for Autonomous Locomotion Robot (ALR) and a System of
Avionics Modules (SAM) that is used in civil aircraft Ae270. This article describes main characteristics of CAN
communication data bus and its higher layer protocol CANaerospace that are used in communication system
of ALR and SAM. The basic idea of distributed control systems are described and their main characteristics are
presented. Developed control systems proved that the CAN with HLP CANaerospace is efficient and reliable
communication data bus that can be used in safety critical applications like mobile robots, automotive, and
avionics systems.
1 INTRODUCTION
The Controller Area Network (CAN) adapted by
Bosch is known as a protocol for high performance
and high reliable serial communication links between
electronic control units in the field of automotive and
industrial control applications. Design of CAN data
bus enables distributed system control in real-time
with a high degree of transmission security.
Since that prime manufacturers of integrated cir-
cuits already implement CAN protocol support into
their product, rapid exploitation of this protocol with
other applications, e.g. robotics and aviation will take
place.
Distributed control, or distributed problem solving,
involves the use of decentralized, loosely coupled con-
trollers or problem solvers. The system is decentral-
ized, so that both the control and the data are func-
tionally and often geographically distributed.
Multiprocessor control systems that are charac-
terised with high independence comprise very impor-
tant area of automation resources. The spine of these
systems must include a powerful communication sys-
tem. Maintenance of the multiprocessor system pri-
ority requires a fast, safe, and reliable communication
channel. Based on these requirements, the CAN com-
munication device was used (CAN).
2 CAN COMMUNICATION
SYSTEM
The distributed control system based on CAN com-
munication data bus allows nondeterministic control
in real-time. Matching rate and access method of
CAN data bus is specifically adapted for distributed
control systems. CAN is based on broadcast com-
munication mechanism which is achieved by using
a message oriented transmission protocol. Stations
and their addresses are not defined, CAN only defines
messages. The message is identified by a message
identifier which is unique within the whole network
and it defines not only the content but also the priority
of message.
2.1 Higher Layer Protocol
CANaerospace
CANAerospace (see (CANaerospace)) is an ex-
tremely lightweight protocol/data format definition,
which was designed for the highly reliable commu-
nication of microcomputer-based systems in airborne
applications via CAN. The purpose of this definition
is to create a standard for applications requiring an
efficient data flow monitoring and easy time-frame
synchronisation within redundant systems. The defi-
82
Švéda M., Szabó I. and Opluštil V. (2006).
DISTRIBUTED CONTROL SYSTEMS BASED ON COTS COMMUNICATION DATA BUS.
In Proceedings of the Third International Conference on Informatics in Control, Automation and Robotics, pages 82-85
DOI: 10.5220/0001215300820085
Copyright
c
SciTePress
nition is kept widely open to allow implementation of
user-defined message types and protocols.
The data format definition specifies 6 basic mes-
sage types, which are used for different network ser-
vices. Each message type has an associated CAN-ID
range defining the message priority. The identifier as-
signment within the specified ranges is at the user’s
discretion.
Canaerospace features:
• unique identification of message format by mes-
sage transmitting device identifier and message data
type,
• message numbering for identification of message
drop-outs,
• critical event signaling to enable each bus-linked
device to inform others of its error status
• assigning addresses to bus-connected devices and
service priority,
• fixed assignment of identifiers to default data values
used in aerospace technology, mechanism similar to
that applied to ARINC429 bus,
• easy and unique implementation of CANAerospace
protocol simplifies certification process,
• high reliability.
3 DISTRIBUTED CONTROL
SYSTEM FOR ALR
In practice, a multiprocessor distributed system con-
sists of several independent processor modules. This
structure of control system has been successfully im-
plemented and tried out on the project of autonomous
locomotive robot VUTBOT2 (Szabo´, 2002), (Szabo´
et al., 2002), (Szabo´, 2003).
Conception of distributed multiprocessor system al-
lows to easily connect next modules into the system
without spurious interference to existing hardware and
software parts.
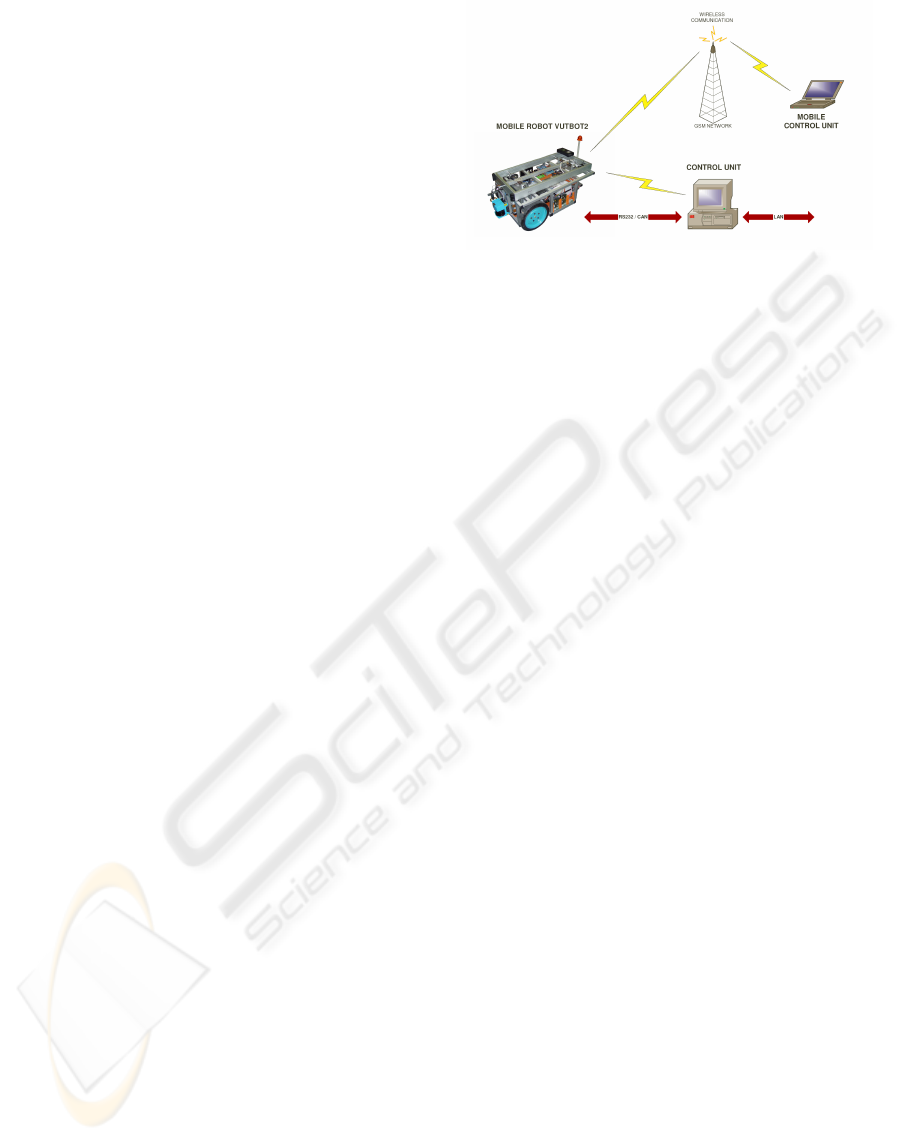
The control system consists of three main, mutually
relating parts:
1. Multiprocessor control system of undercarriage.
The ALR undercarriage control system is divided
into several function blocks.
2. ALR monitoring module. This part is used for
monitoring internal and external ALR states.
3. Higher layer control module. This system repre-
sents input/output communication gate and can be
used for specification and monitoring of ALR ac-
tivities by a master control system.
Figure 1: ALR control system.
Multiprocessor control system of undercarriage is
divided into several functional blocks:
• Communication module. Module contains radio
FM transceiver for wireless communication with
manufacturing system.
• Sensor module. An external sensorial system and
a laser distance measurement scanner PLS are con-
nected to this module. (PLS device presents the
main external sensor in movement control on the
working environment).
• Locomotion module. This module supports drive
and regulation of DC motors. Front wheel speed
difference is calculated (electric differential) based
on the required direction. The module allows man-
ual control of motion in a critical situation.
• Control module. The module allows robot motion
control according to basic commands describing
optimal robot path to the goal position. This module
analyses and performs these basic commands that
can be extended upon additional demands.
The multiprocessor control system is con-
nected by CAN (CAN) communication
data bus with higher layer protocol (HLP)
CANaerospace (CANaerospace).
4 DISTRIBUTED CONTROL
SYSTEM FOR SAM
The SAM – System of Aviation Modules is a unique
open distributed aviation system that performs spe-
cific functions onboard the Ae270 aircraft (see Fig. 2)
and also provides internal functions for module di-
agnostics. Each module integrates and automatically
carries out specific functions onboard the plane thus
increasing the comfort of the cockpit crew when oper-
ating and controlling the aircraft. The individual mod-
ules can operate independently. Alternatively they can
DISTRIBUTED CONTROL SYSTEMS BASED ON COTS COMMUNICATION DATA BUS
83

be extended or grouped as required by the customer
via a communication bus implemented by means of
the CAN (Controller Area Network) serial commu-
nications interface standard and the HLP (Higher
Layer Protocol) communication protocol within the
CANaerospace standard.
Figure 2: SAM modules onboard the Ae270 aircraft.
The hardware and software resources have been
developed using elementary function blocks shared in
general by the individual SAM modules. Universality
and modulability of SAM system insures compatibil-
ity with other civil airborne applications.
Short description of each module in SAM is given
in Table 1.
Table 1: Description of individual SAM modules.
Module Functional description
SAM IUCH Electric power supply control
module
SAM TIM Timer, fuel distribution and de-
icing module
SAM WSHD Windshield heating module
SAM ACC Y–load factors monitoring mod-
ule
SAM INP Module of inputs
SAM FUEL Fuel distribution control module
SAM ENG Engine monitoring module
SAM MFD Multifunctional display module
The SAM was primary developed for use in the
Ae270 aircraft, but it can be used in any other avion-
ics system. The SAM was developed in accordance
with RTCA/DO-254 and RTCA/DO-178B standards.
Compliance of these standards during the develop-
ment cycle is required by a certification authorities for
a type certification issue.
4.1 Evaluation of CAN Data Bus in
Ae270 Civil Aircraft
Implementation of SAM distributed control system
based on CAN communication data bus into the Ae270
civil aircraft was one of the first similar projects in the
world. Therefore certification authority requires many
simulations and tests to be performed to verify usabil-
ity and reliability of CAN data bus as communication
bus for control system used in civil aircraft.
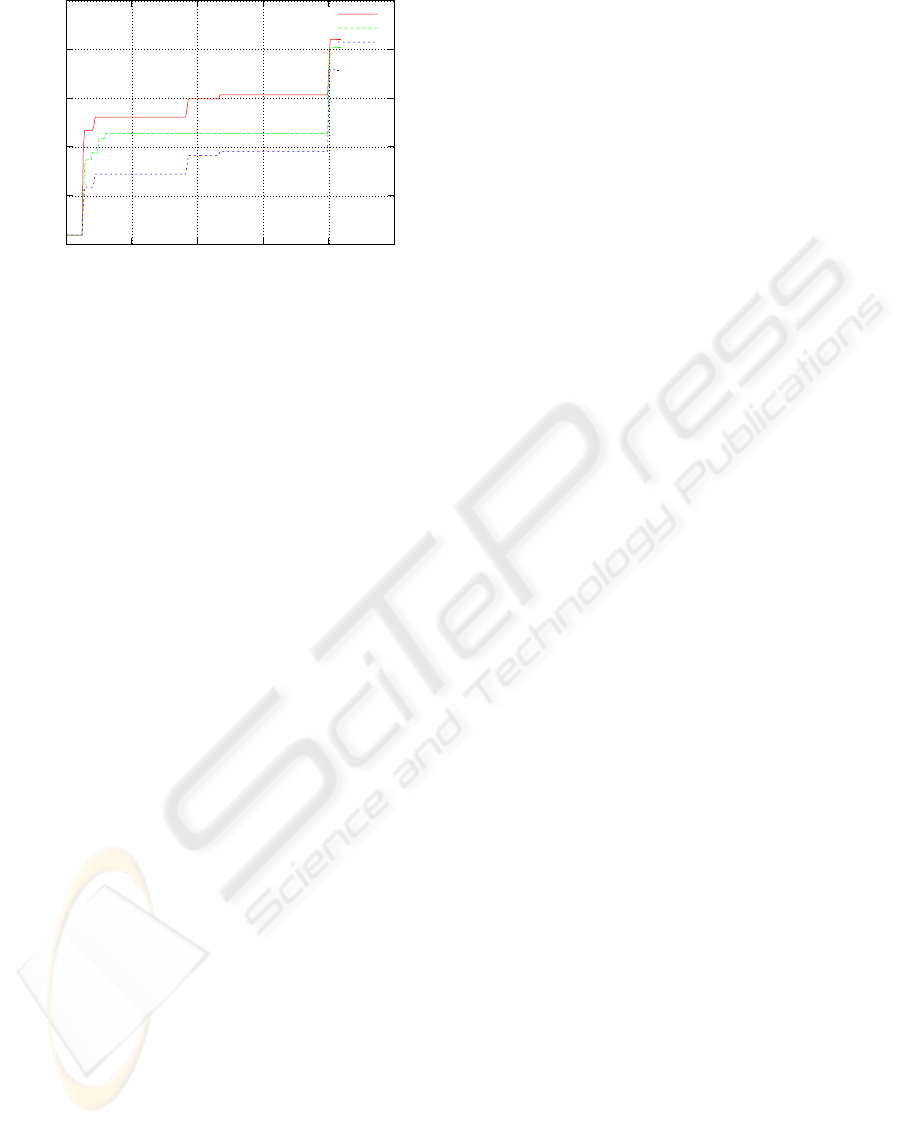
4.1.1 Bus Load and Bus Response
For bus load and bus response evaluation the mathe-
matical models were designed. The detailed formula-
tion of these models can be seen in (CRI2).
Bus load evaluation was performed for three basic
screens of the SAM MFD module. These screens are
labeled HOME1, HOME2, and HOME3 and results
are shown in Figure 3.
11.5
12
12.5
13
13.5
14
14.5
15
15.5
0 10 20 30 40 50 60
Bus Load [%]
Time [s]
Home1
Home2
Home3
Figure 3: Bus load for three basic screens of SAM MFD
module.
Mathematical model was verified by measurement
during real operation using CANalyzer (CANalyzer)
and measured results match theoretical results well.
From presented data results that average bus load is
less than 15 % even during the occurrence of error
messages on the bus, thus bus capacity for SAM is
more than sufficient.
Bus response means time that pass from data inser-
tion into the queue to their receiving by a receiver.
The results obtained from mathematical model are
shown in Figure 4. The figure describes relation be-
tween CAN identifier, which designates the message
priority transferred on CAN bus, and calculated time
response.
From the given findings results effect of message
priority identifier on prolongation of bus response, but
ICINCO 2006 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
84
0
0.05
0.1
0.15
0.2
0.25
0 50 100 150 200 250
Bus Response [s]
CAN ID x 10e-1
Home1
Home2
Home3
Figure 4: CAN bus response.
during normal operation of SAM modules the maxi-
mum theoretical response time can not be achieved.
4.1.2 Bus Characteristics
The basic characteristics of CAN data bus used on-
board the Ae270 aircraft are:
• transfer rate 27.7 Kbps,
• average load of CAN bus on Ae270 is 33.9 %,
• probability of undetected message corruption in a
CAN network is around 1 · 10
−13
,
• probability of undetected failures per flight hours is
2.7 · 10
−8
,
• length of CAN data bus is 13.5 m,
• the number of nodes (SAM units) is 8.
System of Avionic Modules SAM was awarded the
Gold Medal of 43th International Engineering Fair
in Brno, Czech Republic, 2001. In December 2005
the Unis company obtained an approval from Czech
aviation authority (CAA) for its System of avionics
modules (SAM). Next in December 2005 the Euro-
pean Aviation Safety Agency (EASA) issued a type
certificate for an Ae270 civil aircraft produced by Aero
Vodochody. Specific functions onboard the Ae270 air-
craft is performed by SAM developed by Unis. The
type certificate for US market was issued by the Fed-
eral Aviation Agency on February 24, 2006.
5 CONCLUSION
During the development project the CAN communi-
cation data bus was successfully implemented into the
mobile robot and avionics control system. Its perfor-
mance and reliability satisfy requirements of individ-
ual systems and their standards.
The next step for the future will be implementation
of CAN communication data bus into more complex
robotic systems like a manufacturing robotic system.
Performed tests on SAM proved CAN suitability in
advanced avionics systems.
Type certification issued for avionics system with
described communication data bus for use in civil avi-
ation represents one of the first realisation of similar
project in the world.
ACKNOWLEDGEMENTS
The analysis of commercial off the shelf data buses
for robotics and airborne applications were acquired
using the subsidization of the Ministry of Industry and
Trade of the Czech Republic, research plan FI–IM/084
”Commercial Off The Shelf (COTS) Databuses De-
velopment for Advanced Avionics and Airborne Sys-
tems (AIR-COTS)”.
Hardware and software development and physical
modules were realized and project was supported by
UNIS, spol. s r.o.
REFERENCES
SZABO
´
, I., OPLUS
ˇ
TIL, V. Distributed CAN Based Control
System for Robotic and Airborne Applications. In
ICARV, 5th International Conference on Control, Au-
tomation, Robotics and Vision. Singapore: 2002.
SZABO
´
, S
ˇ
., ET AL. Autonomous mobile robot with multi-
processor control system. 7th International Workshop
on Advanced Motion Control, AMC 2002. Maribor,
Slovenia. ISBN 0–7803–7479–7.
SZABO
´
, S
ˇ
. Research of local and global navigation methods
for autonomous mobile robot with multiprocessor con-
trol system. IEEE International Conference on Indus-
trial Technology, IEEE ICIT 2003. Maribor, Slovenia.
ISBN 0–7803–7852–0, ISBN 0–7803–7853–9 (CD).
SVAC
ˇ
INA, D., MIKULA, J. Compliance Report for CRI S-2.
Description of CAN and SAM in Ae270 airplane. Doc-
ument No.: VF-401-AVIO-001, revision: 040322ds.
Unis spol. s r.o.: 3/22/2004.
CAN Specification. Bosch, 1995.
<http://www.can.bosch.com>
CANaerospace. Michael Stock, Flight Systems, 2001.
<http://www.stockflightsystems.com>
System of Aviation Modules (the SAM) for Ae270 aircraft.
Technical specification No.TP-3100-01-01-X, UNIS
Ltd, Brno, Czech Republic. rev. 0, 2001.
CANalyzer and DENalyzer 5.2. The Tools for Comprehen-
sive Network Analysis. Vector, 2005.
<http://www.vector-cantech.com>
DISTRIBUTED CONTROL SYSTEMS BASED ON COTS COMMUNICATION DATA BUS
85
