
CONTROLLING THE LORENZ SYSTEM WITH DELAY
Yechiel J. Crispin
Department of Aerospace Engineering
Embry-Riddle University, Daytona Beach, FL 32114, USA
Keywords:
Adaptive Control, Chaos, Hyperchaos, Parameter Estimation, Signal Processing, Lagrangian Fluid Dynamics,
Chaotic Advection, Nonlinear Dynamics, Nonlinear Systems and Modeling.
Abstract:
A generalized method for adaptive control, synchronization of chaos and parameter identification in systems
governed by ordinary differential equations and delay-differential equations is developed. The method is
based on the Lagrangian approach to fluid dynamics. The synchronization error, defined as a norm of the
difference between the state variables of two similar and coupled systems, is treated as a scalar fluid property
advected by a fluid particle in the vector field of the controlled response system. As this error property is
minimized, the two coupled systems synchronize and the time variable parameters of the driving system are
identified. The method is applicable to the field of secure communications when the variable parameters of the
driver system carry encrypted messages. The synchronization method is demonstrated on two Lorenz systems
with variable parameters. We then apply the method to the synchronization of hyperchaos in two modified
Lorenz systems with a time delay in one the state variables.
1 INTRODUCTION
In this paper we develop a generalized method for
controlling chaos in dynamical systems and for syn-
chronizing two coupled chaotic or hyperchaotic sys-
tems. The systems are described by ordinary dif-
ferential equations with initial conditions or delay-
differential equations with initial functions. The in-
dependent parameters appearing in the equations can
be constant or variable. The synchronization error ,
defined as a norm of the difference between the state
variables of the two chaotic systems, is viewed as
a fluid property advected by a marker particle mov-
ing along a trajectory in the vector field of the re-
sponse system. The controlled parameters of the re-
sponse system are varied continuously such as to min-
imize the synchronization error while the two chaotic
systems evolve in time. For the initial value prob-
lem, we derive a system of differential equations gov-
erning the evolution of the controlled parameters re-
quired for synchronization. For the case of the ini-
tial function problem, we derive a system of delay-
differentialequations governing the controlled param-
eters for synchronizing the response system. In both
cases, the fluid dynamical approach mentioned above
is used to develop the equations for the controlled pa-
rameters.
The method is demonstrated by studying sev-
eral examples of chaotic and hyperchaotic systems.
The synchronization method is demonstrated on two
Lorenz systems with variable parameters. We then
apply the method to the synchronization of hyper-
chaos in two modified Lorenz systems with a time
delay in one the state variables.
The possibility of synchronizing two chaotic phys-
ical systems has attracted considerable attention in re-
cent years (Boccaletti, Farini and Arecchi, 1997). A
major motivation is the potential of applying the syn-
chronization methods to the field of secure communi-
cations by chaotic masking or scrambling of messages
(Goedgebuer, Larger and Porte, 1998), (Yang, 2004).
Other important applications are in the field of nonsta-
tionary time series analysis and system identification
(Parlitz, 1996), (Crispin, 2002). So far, most of the
attention has been directed towards the study of sta-
tionary chaotic systems, that is systems with constant
parameters. To date, the possibility of using systems
with nonstationary parameters for secure communi-
cations has received less attention, although such sys-
tems are good candidates for secure communications,
3
J. Crispin Y. (2006).
CONTROLLING THE LORENZ SYSTEM WITH DELAY.
In Proceedings of the Third International Conference on Informatics in Control, Automation and Robotics, pages 3-10
DOI: 10.5220/0001219400030010
Copyright
c
SciTePress

especially when the nonstationary parameters rather
than the state variables are used to hide the secret mes-
sages (Crispin, 1998).
Several methods for the control of chaos in dynam-
ical systems have been proposed in recent years (Boc-
caletti et al., 2000). The conjecture of chaos control
by means of perturbations of an accessible parameter
is based on an inherent property of chaotic systems,
namely, their sensitivity to small perturbations in the
parameters (Parlitz, Junge and Kocarev, 1996), (Carr
and Schwartz, 1994), (Ott and Spano, 1995).
Model reference adaptive control methods have
been suggested for chaos suppression and synchro-
nization (Aguirre and Billings, 1994). For example,
a model reference method for the adaptive control
of chaos in dynamical systems with periodic forcing
has been proposed by (Crispin and Ferrari, 1996).
Adaptive control and synchronization of chaos in
discrete time systems has been studied by (Crispin,
1997). Another method for controlling chaos in dy-
namical systems is by introducing parametric forc-
ing and adaptive control, see for example (Crispin,
2000). A more recent method based on an analogy
from fluid dynamics has been described by (Crispin,
2002). Other applications include parameter esti-
mation (Parlitz, Junge and Kocarev, 1996), synchro-
nization of chaotic systems with variable parameters
(Crispin, 1998) and the control of chaos in fluids
(Crispin, 1999).
Many physical, physiological and biological sys-
tems display time delay in their dynamics. Nonlinear
dynamical systems with time delay can have periodic
orbits or very complex dynamics depending upon the
range of values of the time delay and the indepen-
dent parameters of the system. This complex be-
havior has attracted a lot of interest in the study of
time delayed systems from the mathematical point of
view (Kolmanovskii and Myshkis, 1992) as well as
from the physical and physiological points of view,
see for example (Losson, Mackey and Longtin, 1993),
(Mansour and Longtin, 1998). The use of time delay
in feedback control systems has also been proposed,
see for example (Hegger et al., 1998), (Goedgebuer,
Larger and Porte, 1998) and (Just et al., 1998). Con-
trol of chaos in systems with time delay has also been
studied in (Mansour and Longtin, 1998).
2 THE FLUID DYNAMICAL
APPROACH
Consider two similar dynamical systems described by
ordinary differential equations. We define two dy-
namical systems as similar if the right hand sides of
the equations are represented by the same function
f(x(t), p(t)), except that the independent parameters
p(t) or q(t) can be represented either by different
or the same functions of time. We first present the
method for the initial value problem and then we con-
sider the case when one of the state variables has a
time delay.
dx/dt = f (x(t), p(t)) (2.1)
dy/dt = f(y(t), q(t))
Here t is time, x ∈R
n
are the state variables of
the driver and y ∈R
n
are the state variables of
the response system. The parameters p(t) ∈R
k
and
q(t) ∈R
k
are independent time variable parameters
of the respective systems and f :R
n
x R
k
7→R
n
is
a nonlinear vector function of the state variables. It
is assumed that the initial values of the state variables
x(0) = x
0
and y(0) =y
0
for t = 0 are not neces-
sarily the same. Similarly the initial values of the pa-
rameters p(0) = p
0
and q(0) = q
0
of the driver
and response systems are different. Since chaotic sys-
tems are sensitive to initial conditions, the driver and
response systems will not synchronize, unless the re-
sponse system is controlled and forced to synchronize
with the driver system using some kind of coupling,
such as a transmitted scalar signal. For instance, a sin-
gle scalar signal s(t), which is a function of the state
x(t), can be transmitted by the driver and used to en-
slave the response system (Tamasevicius and Cenys,
1997), (Peng, Ding and Yang, 1996).
s(t) = h(x(t)) (2.3)
As stated above, the purpose of this paper is to
propose a generalized method of control, stabiliza-
tion, synchronization and parameter identification of
chaotic systems in the more general case where the
parameters p(t) of the driver system vary as a func-
tion of time. In the context of secure communica-
tions, this means that it would be possible to encode a
message in one of the parameters of the driver system
rather then in a state variable, as has been proposed
so far. Once a variable parameter is identified by
the response system using the proposed generalized
method, the encoded message can be recovered. The
method allows more flexibility in masking informa-
tion in chaos. The message can be encoded in a state
variable or in a time variable parameter. The useful in-
formation can also be split into two messages, where
one message is modulated by a state variable and a
second message modulated by a parameter. Synchro-
nization of the state variables of an eavesdropping re-
sponse system with the state variables of the driver
will be difficult because of the sensitivity to small
variations in the parameters of the system, in addition
to the sensitivity to initial conditions and the diver-
gence of nearby trajectories in chaotic systems. Also,
ICINCO 2006 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
4

synchronization can be achieved even when the pa-
rameters p(t) and q(t) are initially substantially dif-
ferent. This is accomplished by controlling the re-
sponse system y such that the parameters p(t) of the
driver system x are eventually identified, that is,
lim
t→∞
|p(t) − q(t)| = 0 (2.4)
In order to achieve synchronization, the dynamics
of the response system parameters q(t) need to be
determined. In other words, the differential equations
governing the evolution of the response parameters
q(t) need to be derived for dynamical systems of the
form of Eqs.(2.1-2.2).
The proposed fluid dynamical approach is based on
the Lagrangian description of fluid motion. It fol-
lows the motion of a fluid particle as it moves in
the velocity vector field w(x, p) created by a fluid
flow (Lamb, 1995), (Milne-Thomson, 1968). Ac-
cording to this approach, the equations of motion of
two marker particles advected in the fluid flows de-
scribed by the vector fields w(x, p) = f (x, p) and
w(y, q) = f(y, q), are given by Eq.(2.1-2.2), where
the right hand sides are to be interpreted as the lo-
cal velocity vectors w(x, p) and w(y, q) at any given
point x ∈R
n
and y ∈R
n
of the two flow fields, re-
spectively, i.e,
dx/dt = w(x, p) = f (x, p) (2.5)
dy/dt = w(y, q) = f (y, q)
In fluid dynamics, the vector fields
w(x, p), w(y, q) ∈R
n
and the state variables
x, y ∈R
n
have a dimension n ≤ 3. Here the analogy
is extended to vector fields of higher dimensions.
Consider the time variation of a scalar property
J(x, y) of the flow along a trajectory of the response
system as it evolves in the state space y ∈R
n
. The
rate of change of this scalar property is due to two
contributions: a local contribution due to its time
variation, plus a contribution which is due to the rate
of change of the property as it is advected along the
trajectory in the state space. The total rate of change
is then given by the substantial derivative DJ/Dt
of the scalar property J, which is the derivative
following the flow:
DJ/Dt = ∂J/∂t + f (y(t), q)∇J (2.6)
∇ = (∂/∂y
1
, ∂/∂y
2
, ..., ∂/∂y
n
)
t
Here the product f (y, q)∇J is a scalar or dot
product. Consider a scalar property J based on the
Euclidean distance between the state vectors x and
y :
J =
1
2
|y −x|
2
=
1
2
n
X
i=1
(y
i
−x
i
)
2
=
1
2
n
X
i=1
e
2
i
(2.7)
where e
i
= y
i
− x
i
are components of the error
vector function e = y − x . Using Eq.(2.7), the local
component of the derivative of J with respect to time
is given by:
∂J/∂t =
n
X
i=1
e
i
de
i
/dt (2.8)
whereas the components of the gradient ∇J are
given by
∂J/∂y
i
= y
i
− x
i
= e
i
(2.9)
Using Eqs.(2.5), (2.6), (2.8) and (2.9), the substan-
tial derivative of J is written as:
DJ/Dt =
n
X
i=1
e
i
[de
i
/dt + f
i
(y(t), q)] (2.10)
and since e = y − x and
de/dt = dy/dt − dx/dt = f (y, q) − f(x, p)
Eq.(2.10) reduces to:
DJ/Dt =
n
X
i=1
e
i
[2f
i
(y(t), q) −f
i
(x(t), p)] (2.11)
Eq.(2.11) defines the rate of change of the positive
scalar property J in terms of the state variables x and
y of the driver and response systems, the independent
driver parameters p and the controllable parameters
q of the response system. The question now is how
should the control vector q be varied such as to con-
tinuously minimize J? As the driver and response
systems evolve, the substantial derivative should be
continuously decreased in order to achieve control
and synchronization, as can be seen from Eq.(2.11),
where perfect synchronization is reached when e =
y − x = 0, and from Eq.(2.7), J reaches the mini-
mum J = 0. A possible control law is to vary the
control vector q such as to decrease the substantial
derivativeDJ/Dt, that is, to continuously change the
control q in a direction opposite to the gradient of
DJ/Dt with respect to the control q:
dq/dt = −G
′
∇
q
(DJ/Dt) =
= −G
′
∇
q
{
n
X
i=1
e
i
[2f
i
(y(t), q) − f
i
(x(t), p)]}
(2.12)
CONTROLLING THE LORENZ SYSTEM WITH DELAY
5

where
∇
q
= (∂/∂q
1
, ∂/∂q
2
, ..., ∂/∂q
k
)
t
and G
′
is a kxk matrix of control gains. Since
f
i
(x, p) does not depend on the control q ,it follows
that
∇
q
f
i
(x(t), p) = 0
,
and Eq.(2.12) becomes:
dq/dt = −G ∇
q
[
n
X
i=1
e
i
f
i
(y(t), q)] (2.13)
where G = 2G
′
.
3 SYNCHRONIZING THE
LORENZ SYSTEM
We now apply the method to a dynamical system
without delay, the chaotic Lorenz system. Consider
the case of synchronization between two Lorenz sys-
tems with variable parameters, where the driver sys-
tem is given by:
dx
1
/dt = σ(x
2
− x
1
)
dx
2
/dt = p
1
(t)x
1
− p
2
(t)x
2
− p
3
(t)x
1
x
3
(3.1)
dx
3
/dt = x
1
x
2
− bx
3
and the transmitted coupling signal for synchro-
nization is chosen as the single variable:
s(t) = h(x(t)) = x
2
(t) (3.2)
The response system is defined by the following
Lorenz system with variable parameters. It is driven
by the transmitted signal s(t) = x
2
(t).
dy
1
/dt = σ(s(t) − y
1
)
dy
2
/dt = q
1
(t)y
1
− q
2
(t)y
2
− q
3
(t)y
1
y
3
(3.3)
dy
3
/dt = y
1
s(t) − by
3
The next step is to derive a system of differen-
tial equations governing the evolution of the con-
trolled parameters q
1
(t), q
2
(t) and q
3
(t). As the
response system evolves and synchronizes with the
driver system, the parameters q
1
(t), q
2
(t) and q
3
(t)
will follow the original parameters p
1
(t), p
2
(t) and
p
3
(t) of the driver system. According to Eq.(2.13) of
the previous section, the first step is to develop the
term
P
3
i=1
e
i
f
i
(y, q) for the response system (3.3).
Using the right hand sides of (3.3), we have:
3
X
i=1
e
i
f
i
(y, q) = (y
1
− x
1
)[σ(s(t) − y
1
)]+
+(y
2
− x
2
)[q
1
(t)y
1
− q
2
(t)y
2
− q
3
(t)y
1
y
3
]+
+(y
3
− x
3
)(y
1
s(t) − by
3
) (3.4)
The gradient with respect to the parameters q is
given by:
∇
q
[
3
X
i=1
e
i
f
i
(y, q)] =
= [(y
2
− x
2
)y
1
, −(y
2
− x
2
)y
2
, −(y
2
− x
2
)y
1
y
3
]
T
(3.5)
The differential equations governing the evolution
of the controlled parametersq are given by:
dq
1
/dt = −G
11
(y
2
− s(t))y
1
+ G
12
(y
2
− s(t))y
2
+
+G
13
(y
2
− s(t))y
1
y
3
dq
2
/dt = −G
21
(y
2
− s(t))y
1
+ G
22
(y
2
− s(t))y
2
+
+G
23
(y
2
− s(t))y
1
y
3
(3.6)
dq
3
/dt = −G
31
(y
2
− s(t))y
1
+ G
32
(y
2
− s(t))y
2
+
+G
33
(y
2
− s(t))y
1
y
3
For example, consider the case where only one pa-
rameter, say p
1
(t) is to be identified, whereas the
other two parametersp
2
(t) and p
3
(t) are known con-
stants. If the synchronized systems are used for se-
cure communication, the parameter p
1
(t) can be used
to carry a hidden message, which can be identified by
the response system. In this case, Equations (3.4-3.6)
reduce to:
3
X
i=1
e
i
f
i
(y, q) = (y
1
− x
1
)[σ(s(t) − y
1
)]+
+(y
2
− x
2
)[q
1
(t)y
1
− p
2
(t)y
2
− p
3
(t)y
1
y
3
]+
ICINCO 2006 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
6
+(y
3
− x
3
)(y
1
y
2
− by
3
) (3.7)
∇
q
[
3
X
i=1
e
i
f
i
(y, q)] = [(y
2
− x
2
)y
1
, 0 , 0]
T
(3.8)
dq
1
/dt = −G
11
(y
2
− s(t))y
1
(3.9)
dq
2
/dt = 0
dq
3
/dt = 0
We now show results of a computer simulation with
the following values of the parameters:
σ = 10 b = 8/3 (3.10a)
p
1
(t) = r
0
+ δr sin ωt (3.10b)
δr = 2 ω = 2π/10 r
0
= 28 (3.10c)
q
2
= p
2
= 1 q
3
= p
3
= 1 (3.10d)
together with the initial condition:
q
1
(0) = r
0
= 28 (3.10e)
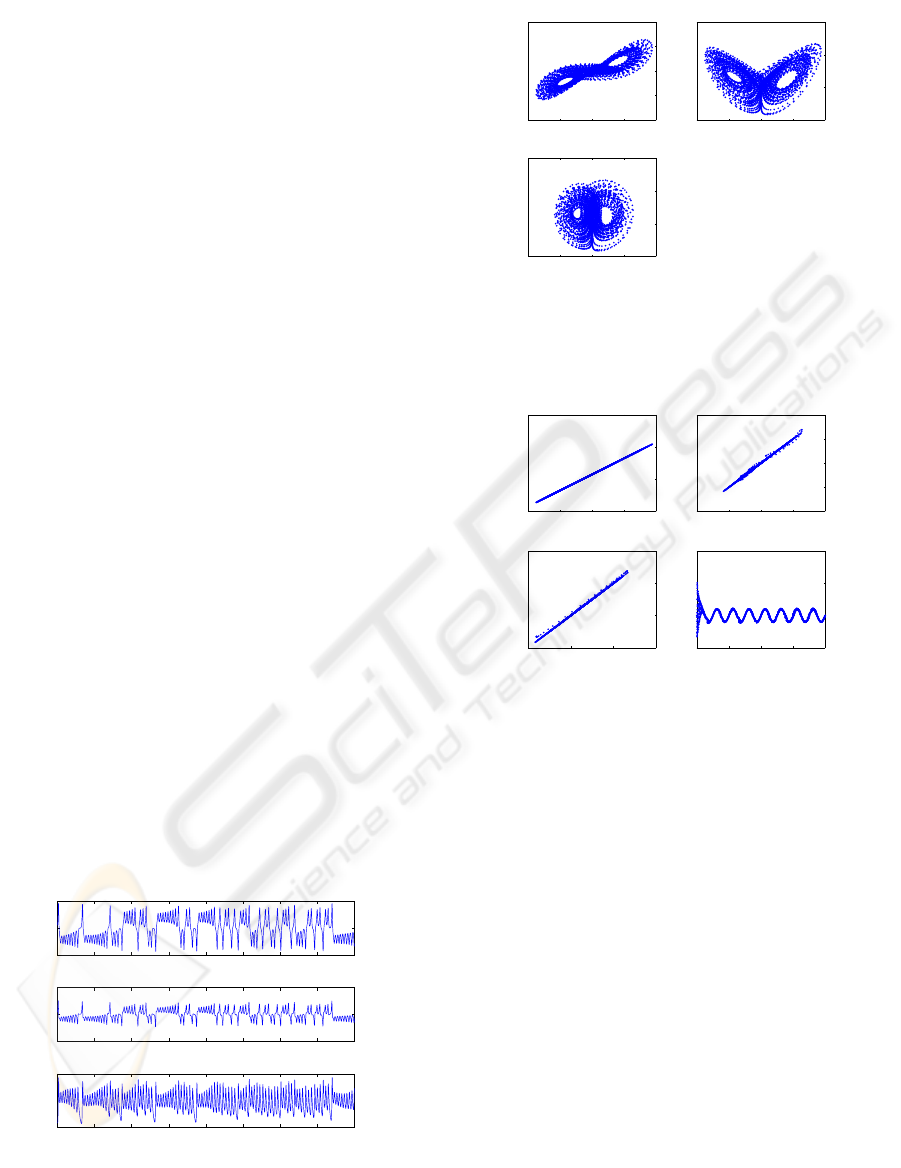
The results of this example are given in Figures
1-3. Fig.1 shows the chaotic state variables of the
driver system. The chaotic attractor is shown in Fig.2.
Similar results are obtained for the response system
as it synchronizes with the driver system. Fig.3 dis-
plays the synchronized state variables y
1
= x
1
,y
2
=
x
2
andy
3
= x
3
, all three eventually converging to
straight lines as shown in the figure. The identi-
fied signal q
1
(t) − r converges to the driver signal
q
1
(t) − r = δr sin ωt and is also shown in the figure.
0 10 20 30 40 50 60 70 80
−20
0
20
x1
t
0 10 20 30 40 50 60 70 80
−50
0
50
x2
t
0 10 20 30 40 50 60 70 80
0
50
x3
t
Figure 1: The chaotic state variables of the driver Lorenz
system with variable parameter.
−20 −10 0 10 20
−40
−20
0
20
40
x1
x2
−20 −10 0 10 20
0
20
40
60
x1
x3
−40 −20 0 20 40
0
20
40
60
x2
x3
Figure 2: The chaotic attractor of the driver Lorenz system
with variable parameter. The response system has a similar
attractor.
−20 −10 0 10 20
−20
0
20
40
x1
y1
−40 −20 0 20 40
−40
−20
0
20
40
x2
y2
0 20 40 60
0
20
40
60
x3
y3
0 20 40 60 80
−10
0
10
20
t
q1 − r
Figure 3: Synchronization between the driver and response
Lorenz systems with variable parameters and the parameter
q
1
(t) of the response system as it identifies the driver signal
p
1
(t).
4 SYNCHRONIZING LORENZ
SYSTEM WITH DELAY
In this section we apply the method to a hyperchaotic
dynamical system, the Lorenz system with a time de-
lay in one of the state variables. Consider the case
of synchronization between two Lorenz systems with
time delay. We treat the case where the state variable
x
1
(t − T ) is delayed by a time delay T . Here the
driver system is given by:
dx
1
/dt = σ(x
2
(t) − x
1
(t − T ))
dx
2
/dt = p
1
(t)x
1
(t − T ) − p
2
(t)x
2
(t)−
−p
3
(t)x
1
(t − T )x
3
(t)
dx
3
/dt = x
1
(t − T )x
2
(t) − bx
3
(t) (4.1)
CONTROLLING THE LORENZ SYSTEM WITH DELAY
7
Suppose the transmitted signal for synchronization
is chosen as the single variable:
s(t) = h(x(t)) = x
2
(t) (4.2)
The response system is defined by the following
nonstationary and delayed Lorenz system, where the
transmitted scalar signal s(t) = x
2
(t) is used to drive
the system.
dy
1
/dt = σ(s(t) − y
1
(t − T ))
dy
2
/dt = q
1
(t)y
1
(t − T ) − q
2
(t)y
2
(t)−
−q
3
(t)y
1
(t − T )y
3
(t)
dy
3
/dt = y
1
(t − T )s(t) − by
3
(t) (4.3)
The next step is to derive a system of differential
equations governing the evolution of the controlled
parameters q
1
(t), q
2
(t) and q
3
(t). As the response
system evolves and synchronizes with the driver sys-
tem, the parameters q
1
(t), q
2
(t) and q
3
(t) will follow
the original parameters p
1
(t), p
2
(t) and p
3
(t) of the
driver system. According to Eq.(2.13) of section 2,
the first step is to develop the term
P
3
i=1
e
i
f
i
(y, q)
for the response system (4.3).
3
i=1
e
i
f
i
(y, q) = (y
1
(t − T ) − x
1
)[σ(s(t) − y
1
(t − T ))]+
+(y
2
− x
2
)[q
1
(t)y
1
(t− T )− q
2
(t)y
2
− q
3
(t)y
1
(t− T )y
3
]+
+(y
3
− x
3
)[y
1
(t − T )s(t) − by
3
] (4.4)
The gradient with respect to the parameters q is
given by:
∇
q
[
3
X
i=1
e
i
f
i
(y, q)] =
= [(y
2
− x
2
)y
1
(t − T ) , −(y
2
− x
2
)y
2
, −(y
2
− x
2
)y
1
(t − T )y
3
]
t
(4.5)
The differential equations governing the evolution
of the controlled parametersq are given by:
dq
1
/dt = −G
11
(y
2
− s(t))y
1
(t− T )+G
12
(y
2
− s(t))y
2
+
+G
13
(y
2
− s(t))y
1
(t − T )y
3
dq
2
/dt = −G
21
(y
2
− s(t))y
1
(t− T )+G
22
(y
2
− s(t))y
2
+
+G
23
(y
2
− s(t))y
1
(t − T )y
3
dq
3
/dt = −G
31
(y
2
− s(t))y
1
(t− T )+G
32
(y
2
− s(t))y
2
+
+G
33
(y
2
− s(t))y
1
(t − T )y
3
(4.6)
For example, consider the case where only one pa-
rameter, say p
1
(t) is to be identified, whereas the
other two parametersp
2
(t) and p
3
(t) are known con-
stants. If the synchronized systems are used for secure
communication, the parameter p
1
(t) can carry a hid-
den message, which can be identified by the response
system. In this case, Equations (4.4-4.6) reduce to:
3
X
i=1
e
i
f
i
(y, q) = (y
1
− x
1
)[σ(s(t) − y
1
)]+
+(y
2
−x
2
)[q
1
(t)y
1
−p
2
y
2
−p
3
y
1
y
3
]+(y
3
−x
3
)(y
1
y
2
−by
3
)
(4.7)
∇
q
[
3
X
i=1
e
i
f
i
(y, q)] = [(y
2
− x
2
)y
1
(t − T ), 0 , 0]
T
(4.8)
dq
1
/dt = −G
11
(y
2
− s(t))y
1
(t − T ) (4.9)
dq
2
/dt = 0
dq
3
/dt = 0
Here we show results of a computer simulation
with the following values of the parameters:
σ = 10 b = 8/3 T = 0.1 G11 = 10 (4.10a)
p
1
(t) = r
0
+ δr sin ωt (4.10b)
δr = 2 ω = 2π/10 r
0
= 28 (4.10c)
q
2
= p
2
= 1 q
3
= p
3
= 1 (4.10d)
together with the initial condition:
q
1
(0) = r
0
= 28 (4.10e)
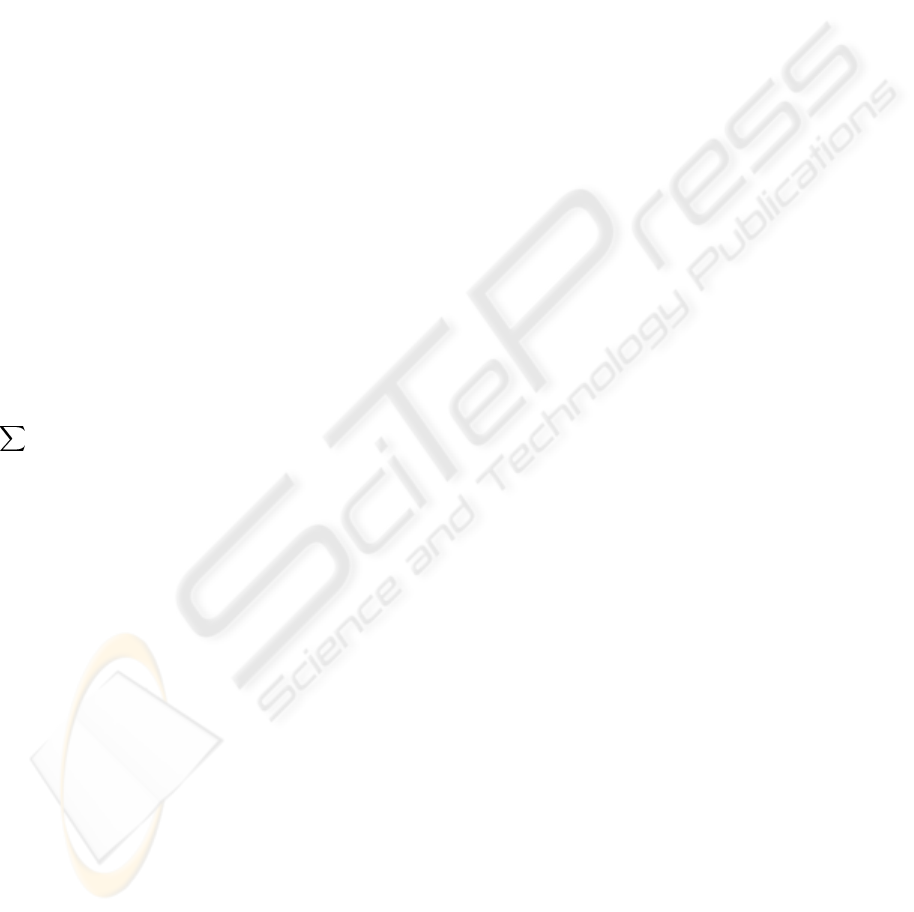
The results of this example are given in Figures 4-
6. Fig.4 shows the hyperchaotic state variables of the
driver system. A comparison with Fig.1 above, it can
be seen that the state variables in Fig.4 display a more
complex type of chaos, because of the time delay.
ICINCO 2006 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
8
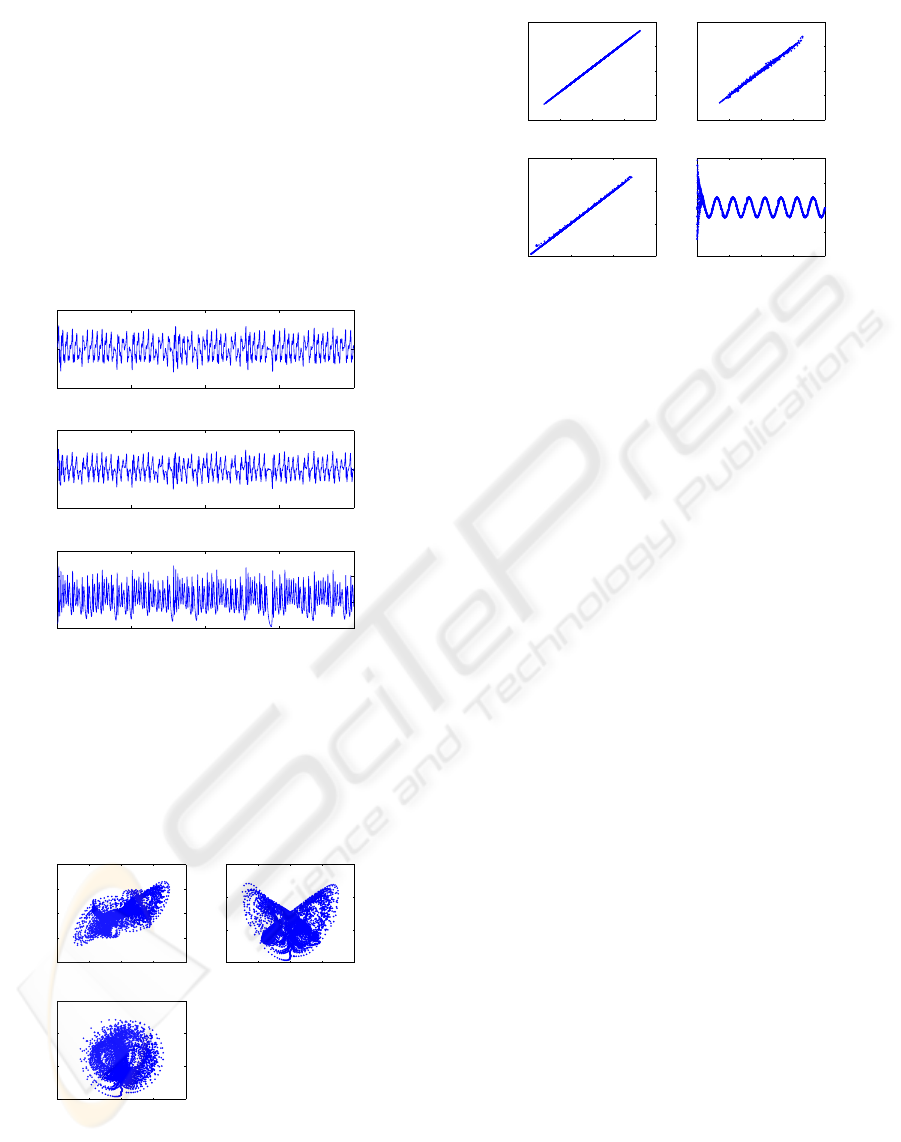
Comparing with the attractor of Fig. 2 above, it is ap-
parent that the hyperchaotic attractor shown in Fig.5
displays a more complex behavior. Similar results are
obtained for the response system as it synchronizes
with the driver system. Fig.6 displays the synchro-
nized state variables y
1
= x
1
,y
2
= x
2
andy
3
= x
3
,
all three eventually converging to straight lines as
shown in the figure. The identified signal q
1
(t) − r
converges to the driver signal q
1
(t) − r = δr sin ωt
and is also shown in the figure.
0 20 40 60 80
−50
0
50
x1
t
0 20 40 60 80
−50
0
50
x2
t
0 20 40 60 80
0
20
40
60
x3
t
Figure 4: The hyperchaotic state variables of the driver
Lorenz system with delay and variable parameter.
−40 −20 0 20 40
−40
−20
0
20
40
x1
x2
−40 −20 0 20 40
0
20
40
60
x1
x3
−40 −20 0 20 40
0
20
40
60
x2
x3
Figure 5: The hyperchaotic attractor of the driver Lorenz
system with delay and variable parameter. The response
system has a similar attractor.
−40 −20 0 20 40
−40
−20
0
20
40
x1
y1
−40 −20 0 20 40
−40
−20
0
20
40
x2
y2
0 20 40 60
0
20
40
60
x3
y3
0 20 40 60 80
−10
−5
0
5
10
t
q1 − r
Figure 6: Synchronization between the hyperchaotic driver
and response Lorenz systems with delay and variable pa-
rameters and the parameter q
1
(t) of the response system as
it identifies the driver signal p
1
(t).
5 CONCLUSIONS
A generalized method for adaptive control, synchro-
nization of chaos and parameter identification in sys-
tems governed by ordinary differential equations and
delay-differential equations has been presented. The
method is based on the Lagrangian approach to fluid
dynamics. The synchronization error is treated as a
scalar fluid property advected in the vector field of the
controlled response system. Upon minimizing this er-
ror, the two coupled systems synchronize and the time
variable parameters of the driving system are identi-
fied. The method was used to synchronize two Lorenz
systems with variable parameters. The method was
also applied to the synchronization of hyperchaos in
two modified Lorenz systems with a time delay in one
the state variables. Some implications of using the
method in the field of secure communications where
the transmitted information is masked by chaos or hy-
perchaos have been discussed.
REFERENCES
Aguirre, L. and Billings, S. (1994). Model Reference Con-
trol of Regular and Chaotic Dynamics in the Duffing-
Ueda Oscillator. In IEEE Transactions on Circuits and
Systems I, 41, 7, 477-480. IEEE.
Boccaletti, S., Farini, A. and Arecchi, F.T. (1997). Adaptive
Synchronization of Chaos for Secure Communication.
In Physical Review E, 55, 5, 4979-4981.
Boccaletti, S., Grebogi, C., Lai, Y.C., Mancini, H. and
Maza, D. (2000). The Control of Chaos: Theory and
Applications. In Physics Reports 329, 103-197, Else-
vier.
Carr, T. and Schwartz, I. (1994). Controlling Unstable
Steady States Using System Parameter Variation and
CONTROLLING THE LORENZ SYSTEM WITH DELAY
9

Control Duration. In Physical Review E, 50, 5, 3410-
3415.
Crispin, Y. (2002). A Fluid Dynamical Approach to the
Control, Synchronization and Parameter Identification
of Chaotic Systems. In American Control Conference,
ACC 2002, Anchorage, AK, 2245-2250.
Crispin, Y. (2000) Controlling Chaos by Adaptive Para-
metric Forcing. In Intelligent Engineering Systems
Through Artificial Neural Networks, Vol. 10, Edited
by Dagli et al., ASME Press, New York.
Crispin, Y. (1999) Control and Anticontrol of Chaos in Flu-
ids. In Intelligent Engineering Systems Through Arti-
ficial Neural Networks, Vol. 9, Edited by Dagli et al.,
ASME Press, New York.
Crispin, Y. (1998). Adaptive Control and Synchronization
of Chaotic Systems with Time Varying Parameters.
In Intelligent Engineering Systems Through Artificial
Neural Networks, Vol. 8, Edited by Dagli et al., ASME
Press, New York.
Crispin, Y. (1997) Adaptive Control and Synchronization of
Chaos in Discrete Time Systems. In Intelligent Engi-
neering Systems Through Artificial Neural Networks,
Vol. 7, Edited by Dagli et al., ASME Press, New York.
Crispin, Y. and Ferrari, S. (1996). Model Reference Adap-
tive Control of Chaos in Periodically Forced Dynami-
cal Systems. In 6th AIAA/USAF/NASA Symposium on
Multidisciplinary Analysis and Optimization, Belle-
vue, WA, 882-890, AIAA Paper 96-4077.
Goedgebuer, J.P., Larger, L. and Porte, H. (1998). Opti-
cal Cryptosystem Based on Synchronization of Hy-
perchaos Generated by a Delayed Feedback Tunable
Laser Diode. In Physical Review Letters, 80, 10,
pp.2249-2252.
Hegger, R., Bunner M.J., Kantz, H. and Giaquinta, A.
(1998) Identifying and Modeling Delay Feedback
Systems. In Physical Review Letters, 81, 3, 558-561.
Just, W., Reckwerth, D., Mockel, J., Reibold, E. and H.
Benner, H. (1998) Delayed Feedback Control of Peri-
odic Orbits in Autonomous Systems. In Physical Re-
view Letters, 81, 3, 562-565.
Kolmanovskii, V. and A. Myshkis, A. (1992) Applied The-
ory of Functional Differential Equations. In Math-
ematics and its Applications, Vol. 85, Kluwer, Dor-
drecht.
Lamb, H. (1995). Hydrodynamics. Cambridge University
Press, NY, sixth edition.
Losson, J, Mackey, M.C. and Longtin, A. (1993). Solu-
tion Multistability in First-order Nonlinear Differen-
tial Delay Equations. In Chaos, 3, 2, 167-176.
Mansour, B. and Longtin, A. (1998) Chaos Control in Mul-
tistable Delay Differential Equations and Their Singu-
lar Limit Maps. In Physical Review E, 58, 1, 410-422.
Mansour, B. and A. Longtin, A. (1998) Power Spectra and
Dynamical Invariants for Delay Differential and Dif-
ference Equations. In Physica D 113, 1, 1-25.
Milne-Thomson, L. (1968). Theoretical Hydrodynamics.
MacMillan, NY, fifth edition.
Ott, E. and Spano, M. (1995). Controlling Chaos. In Physics
Today, 48, 34.
Parlitz, U. (1996). Estimating Model Parameters From
Time Series by Auto-Synchronization. In Physical
Review Letters, 76, 8, pp.1232-1235.
Parlitz, U., Junge, L. and Kocarev, L. (1996). Synchroniza-
tion Based Parameter Estimation From Time Series.
In Physical Review E, 54, 6, pp.6253-6259.
Peng, J.H., Ding, E.J., Ding, M. and Yang, W. (1996). Syn-
chronizing Hyperchaos with a Scalar Transmitted Sig-
nal. In Physical Review Letters, 76, 6, 904-907.
Tamasevicius, A. and Cenys, A. (1997). Synchronizing Hy-
perchaos with a Single Variable. In Physical Review
E, 55,1, 297-299.
Yang, T. (2004). A Survey of Chaotic Secure Communica-
tion Systems. In International Journal of Computa-
tional Cognition, 2, 2, 81-130.
ICINCO 2006 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
10
