
DISTRIBUTED EMERGENCY MANAGEMENT
WITH SPATIAL SCENARIOS
Peter Sapaty
Institute of Mathematical Machines & Systems, National Academy of Sciences,
Glushkova Ave 42, Kiev 03187, Ukraine
Robert Finkelstein
Robotic Technology Inc., 11424 Palatine Drive, Potomac, Maryland 20854, USA
Joaquim Filipe
Departamento Sistemas e Informática, Escola Superior de Tecnologia de Setúbal,
Setúbal 2910-761, Portugal
Keywords: Critical infrastructures, key resources, emergency management, emergent societies, crisis relief, information
technologies, distributed control, WAVE-WP model, wearable electronic devices, mobile robotics, spatial
scenarios.
Abstract: A radically new approach will be described for the fully distributed and dynamic management of advanced
crisis relief operations and missions. It is based on the installation of a universal “social” module in many
existing and massively used data processing and control devices, including (but not limited to) internet hosts,
laptops, mobile robots and mobile phones. These modules can collectively interpret a special scenario
language while exchanging higher-level program code with accompanying data and control in parallel. This
can dynamically integrate any scattered post-disaster human and technical resources into an operable
distributed system which, from one side, is effectively supervised externally, and from the other side, is
capable of solving complex self-analysis, coordination, survivability, relief, and reconstruction problems
autonomously.
1 INTRODUCTION
1.1 The Grim Big Picture
Millions of people are on the move, traffic jams
everywhere. Houses destroyed, infrastructures gone,
winds hundreds kilometers per hour, flooding and
fires. No electricity, shortage of food and fuel, usual
ties broken, businesses vanished, jobs lost. No
central authorities or services, looting and
lawlessness… This is becoming a familiar picture
throughout the world, especially due to global
warming and climate change. Katrina and Rita are
the recent sad examples. Earthquakes are another
disaster area, like the recent one in Pakistan, and the
tsunami a year before. Manmade disasters caused by
armed conflicts and terrorist attacks are effectively
contributing to this list too.
How to regain integrity, restore law and order,
and assemble scattered resources for a collective
survival? How to rebuild the damaged territory,
revive the previous infrastructures or create new
ones, and return to normal life?
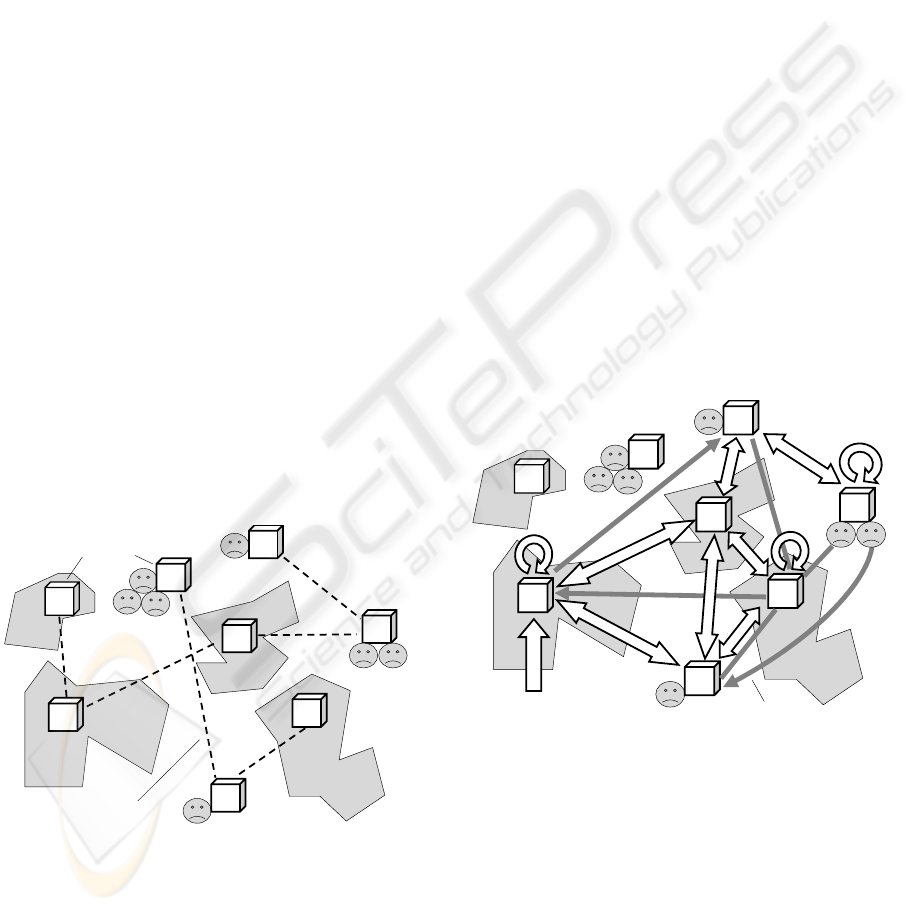
In Fig.1, a symbolic picture of the post-disaster
area, once representing an integral organism, is
shown with the wreckage of living quarters,
organizations and infrastructures, also separated and
scattered individuals and their emergent grouping.
Despite indiscriminate damages, the disaster area
can still hold key human, technical and natural
resources; its parts can still be able to communicate
with each other. For example, cellular towers, at
least some of them, can still be operating, and/or
57
Sapaty P., Finkelstein R. and Filipe J. (2006).
DISTRIBUTED EMERGENCY MANAGEMENT WITH SPATIAL SCENARIOS.
In Proceedings of the Third International Conference on Informatics in Control, Automation and Robotics, pages 57-66
DOI: 10.5220/0001221500570066
Copyright
c
SciTePress

access to internet may remain available. Radio
communications, usually local, can be helpful too,
and some units in the area may have satellite phones.
The electric grid power may remain available, and
the same grid can potentially be used for data
communications too (such promising projects
already exist). Possible stratospheric solutions for
broadband communications, which are discussed
now too, may look promising to cope with the crisis
situations. So there may be sufficient resources for
self-survival and even self-recovery after the major
disasters, especially with an external aid hurrying to
the area, but they may be highly scattered and very
much disorganized.
Individuals
Wreckage of regions, organizations, and infrastructures
Emergent grouping
Casual
communications
Figure 1: A grim picture of the disaster area.
Restoring integrity and coordination in the disaster
area is becoming a primary goal in emergency
management efforts.
1.2 Emergency Management
Emergency management, EM (Bullock, 2004), due
to the increased world dynamics, is one of the
hottest topics today. The emergency managers
around the world are faced with new threats, new
responsibilities, and new opportunities. It is widely
believed (Nunn, 2005) that the combination of novel
technologies and data bases can allow law
enforcement and intelligence investigators to
identify potential terrorist plots, use a multitude of
data bases that may contain hidden patterns of
information about transactions needed to execute
plots, and then mount preemptive strikes to stop
their plans.
The National Response Plan (2004) establishes a
comprehensive all-hazards approach to enhance the
ability to manage domestic incidents. The plan
incorporates best practices and procedures from
different incident management disciplines. Another
prominent document, The National Infrastructure
Protection Plan, NIPP (2005) provides a unifying
structure for the integration of all critical
infrastructures and key resources protection efforts
into a single national program.
However, the existing efforts are actually
offering yet another infrastructures, to be built on the
same principles as the existing ones, i.e. consisting
of specialized components located in certain places
and communicating with each other, with a good
deal of central control over them. Due to this, they
may inevitably be as (if not more) vulnerable to
attacks and failures as other infrastructures, and may
become a burden rather than savior.
Even in the relatively modest Katrina case, local
infrastructures were indiscriminately fragmented and
totally inoperable (while malicious ones thriving),
and federal bodies showed clumsiness and
inefficiency. The new global infrastructures outlined,
like what we see in NIPP, may result in a similar
performance in case of major disasters caused by
hurricanes, earthquakes, or WMD attacks.
1.3 New Approaches Needed
We believe that the critical infrastructure protection,
recovery, and relief ideologies and technologies
should be based on quite different, revolutionary
rather than evolutionary, principles, and they should
evolve and operate in other time-space dimensions
than the traditional infrastructures and forces that
can harm them, in order to be incomparably superior
and unaffected themselves in case of major crises.
A completely different approach is being
developed of how to penetrate into any distributed
and open systems and establish an overwhelming
power over them (destruction of malicious
infrastructures in these systems being an option).
Any global or local scenario we want to
implement over any area or system is formulated in
a special spatial control language, which is
interpreted cooperatively in a distributed system
widely using smart mobile program code covering
the system or its parts in parallel. This provides
spatial hologram-like algorithms which dynamically
exist in between system components rather than
inside them, often being unobservable and
unreachable by conventional means.
Actually, this work follows a sort of an
intelligent super-virus ideology, with its potentially
unlimited self-penetration and self-recovery
possibilities. The approach can also setup, at runtime,
any needed infrastructures over scattered post-
ICINCO 2006 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
58
disaster human or technical resources, and these
infrastructures can evolve and freely migrate in both
physical and virtual worlds, self-recovering after
damages and preserving integrity and goal
orientation. The paper summarizes the technology
called WAVE-WP that serves these purposes,
outlines its applications and possible implementation
with the use of massively wearable devices.
Examples of spatial programming of some
exemplary relief operations will be demonstrated too.
The paper also uses and extends the material
previously reported at (Sapaty, Sugisaka, 2006).
2 THE WAVE-WP PARADIGM
The distributed computation and control WAVE-WP
(or World Processing) model and technology
(Sapaty, 1999, 2005; Sapaty, Sugisaka, 2005) are
based on a higher-level language describing parallel
distributed solutions in computer networks as a
single seamless spatial process rather than traditional
collection and interaction of parts (agents), while
shifting these and other routines to an efficient
automatic implementation.
Communicating copies of the WAVE-WP
language interpreter (WI) should be present in
sensitive points of the system to be governed (like
internet hosts, robots, troop carriers, dismounted
soldiers, separated groups of individuals, laptops,
mobile phones, etc.), as shown in Fig. 2 for the post-
disaster area of Fig. 1.
WI
WI
WI
WI
WI
WI
WI
WI
Dynamic channels
Wave interpreters
Figure 2: Wave interpreters in sensitive points of the
distributed system.
Parallel spatial scenarios (or waves) written in
the language can start from any interpreter, covering
the network at runtime and cooperating with each
other in the distributed space. The approach often
provides hundreds of times application code
reduction and simplification, allowing us to
concentrate on efficient global solutions rather than
implementation details.
Spreading via networked WIs, waves can create
dynamic knowledge infrastructures arbitrarily
distributed between the system components.
Subsequently or simultaneously navigated by same
or other waves, they can effectively support
distributed databases, advanced command and
control, global situation awareness, parallel
inference, and autonomous decisions. It is
convenient to operate in this seamless virtual world
fully ignoring its physical distribution, whereas
virtual networks can migrate (partially or as a
whole) in physical networks while being processed.
Installed in advance (or loaded in an emergency)
in different components that may happen to be
located in a disaster area, with possibilities of their
communication using any remaining channels, WIs
can convert the whole area into an operable self-
organized system. The latter being able to solve
complex tasks on itself, where high-level relief
scenarios in WAVE-WP can start and evolve from
any interpreter, covering the whole system or its
needed parts at runtime (see Fig.3).
WI
WI
WI
WI
WI
WI
WI
WI
Spatial scenario
Knowledge network
Waves
Waves
Continuous
processes
Figure 3: Converting the disaster area into an operable
system.
The technology has been working successfully in
(mainly static) computer networks since 1990, with
many computers distributed between different
countries, via the Internet. From 1993, many
complex parallel and distributed solutions were
shown with the creation of distributed virtual
infrastructures mounted between UK, Germany,
Canada, and the US, also multiple chases of mobile
agents & objects by the other ones throughout the
globe. Information about these projects can be found
DISTRIBUTED EMERGENCY MANAGEMENT WITH SPATIAL SCENARIOS
59

in (Sapaty, 1999).
The current orientation of this activity has been
fully on highly dynamic networks, which may
include Internet, mobile cellular networks, radio and
satellite communications, etc. There may also be no
networks at all in the post-disaster zone, in the usual
sense. In the worst case, people can see each other at
a distance (e.g. sitting on floating roofs and
shouting) passing manually the higher-level
commands and accompanying data in the user-
friendly WAVE-WP version. The people can happen
to be on a constant move, changing casual links with
each other over time.
The technology is fully orienting on such loosely
connected, dynamic and emergent systems. We can
write arbitrary complex distributed algorithms
finding the needed solutions in completely
distributed environments with such unsafe and
emergent links. This can allow us to start both local
and global businesses in the disaster zone without
restoration of regular communications, which, of
course, would be much helpful.
3 WAVE-WP LANGUAGE
3.1 The Language Basics
We are considering here only the top definition of
the WAVE-WP language, shown in Fig. 4, with
more details in (Sapaty, 1999, 2005).
wave → { advance ; }
advance → { move , }
move → constant | variable | [ rule ] ( wave ) |
{ move act }
rule → forward | echo
act → fusion | flow
variable → nodal | frontal | environmental
constant → information | matter | code
Figure 4: WAVE-WP language syntax.
Starting from a certain position, the program, or
wave, navigates in physical or virtual space, with
successive advances (separated by a semicolon)
starting from positions reached by the previous
advances. An advance may consist of moves
(separated by a comma) which can develop in
parallel, each one from the same position.
Moves may: reflect the result directly, as a
constant or variable; represent any wave in
parentheses optionally prefixed by a rule; be
arbitrary expressions where other moves are
separated by elementary operations, or acts.
Rules being forward rules, coordinating
spreading of waves or setting up special navigation
contexts, or echo rules detailing the fusion and
return of (remote) states and data. Acts classify as
fusion acts producing new values from operands,
and flow acts moving data and control in space. The
same operations on waves may be set up by both
rules and equivalent to them acts within the
expressions. Variables may be: nodal, dynamically
associated with space positions and shared by
waves; frontal, moving in space with control; and
environmental, accessing the navigated environment
in points reached.
Constants and variables may represent both
information and physical matter; they may also
represent program code to be created, processed or
modified with a subsequent execution as waves, thus
providing programming flexibility in dynamic
environments.
3.2 Spatial Interpretation
What follows from this language definition, is the
unwrapping and replication of the recursive
formulae, rather than traditional reduction, as shown
in Fig. 5.
m
o
v
e
advances
m
o
v
e
m
o
v
e
m
o
v
e
m
ov
e
m
o
v
e
m
o
v
e
m
o
v
e
m
o
v
e
m
o
v
e
m
o
v
e
Positions
reached in
physical or
virtual space
Start
Spatial
coordination
with rules
Control & data echoing
Figure 5: Spatial evolution of waves.
The wave program matches, conquers, floods,
covers the distributed physical or virtual world in
parallel, establishing full control over the space.
Each act is performed in the reached space positions
on local data there, or on what is obtained and
returned by other waves of the expression. The
resultant value on any construct comprises all values
obtained in the points of space reached by it. All
constructs return control states, which are merged
and generalized on higher levels with the use of
rules, for making hierarchical spatial decisions.
ICINCO 2006 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
60

A number of successful implementations of this
approach have been made in different countries,
with public domain of the previous implementation
available on the Internet, for example, in Canada
(Wave system, 2003)
. The new, advanced, version is
currently being re-implemented and patented, with
orientation on both software product and direct
“wave chip”.
4 USING WEARABLE DEVICES
Emergency management may be fundamentally
assisted by the massively wearable individual data
processing and communication devices, which are
expected to remain with individuals under any
circumstances. WIs, installed in them (this can be
done without problems, taking into account the
existing experience of implementation of the WAVE
system on different platforms and compactness of
the language interpreter) can make the whole
societies, especially emergent ones in the disaster
areas, to be programmable and controllable in the
way required, despite the scattering of resources and
limited communications.
Mobile phones, the undisputed leader among
wearables, are expected to be the most common
consumer electronics device on the planet (Mobiles,
2005). By the end of 2009, some 2.6 billion mobiles
will be in regular use around the world. Mobiles, for
example, are catapulting rural Africa into the 21st
century, making it the world's fastest-growing
cellphone market (LaFraniere, 2005). They are
enabling millions of people to skip a technological
generation and bound straight from letter-writing to
instant messaging. Asia is the next fastest-expanding
market.
Many also use GPS, digital cameras, portable
PCs along with mobile phones, and there already
exist advanced products that combine all these and
many other features within a single piece (including
also Bluetooth, WiFi, phone radio and TV (GPS,
2006; Samsung, 2005). 3G, or third generation,
brings broadband for mobiles too (3G, 2005). Also,
the recently unveiled sub-$100 laptop design (Sub-
$100, 2005), with its internet wireless access and a
hand crank for when there is no power supply, is
expected to contribute drastically to the
unprecedented electronic integration of the whole
world. Some of the currently popular massively
wearable devices are shown in Fig.6.
We may assume that these devices (at least some
of them) would remain able to communicate with
each other during and after the disasters via the
wireless networks, internet, radio or any other
channels, and in the worst case even via humans
(who, using voice, handwriting or gestures, can pass
manually the needed code and data, with the return
to an electronic WI level at the reception end).
Figure 6: Examples of massively wearable devices.
5 MANAGEMENT EXAMPLES
We will consider here only elementary examples of
spatial programming in WAVE-WP for some tasks
that may relate to emergency management, with
code simplifications necessary to fit the limited
paper space.
5.1 Spatial Counting of Casualties
Let us consider a fully distributed and parallel
counting of a total number of casualties in the
disaster area, on all affected regions, assuming for
simplicity that only a single WI is used for this task
in each region or group of individuals. (The
interpreter-participant can be negotiated locally if
more than one available in the group/region.)
The following program can be applied from any
WI as an entry or starting one, which can be far
away from the disaster area (say, located in a federal
center). This entry node can also happen to reside
within the area as a special or emergently selected
body or individual (or one of them).
frontal(Domain);
Domain = <disaster area>;
USER =
sum(
hop(direct, Domain);
repeat(
done(apply(casualties)),
hop(anylinks, Domain, first)))
DISTRIBUTED EMERGENCY MANAGEMENT WITH SPATIAL SCENARIOS
61

Let us explain its work step by step, where various
parts of the program can replicate and operate in
different places of the distributed word, in parallel,
always preserving scenario integrity and
subordination to global control. The latter being
parallel and distributed too.
frontal(Domain)
This declares variable Domain in the starting node
as a frontal one, which will subsequently propagate
with the program control in a distributed space, as its
property.
Domain = <disaster area>
In the same node, Domain is assigned proper
parameters of the disaster area (represented, say, as a
polygon or a set of them, here not detailed further),
sufficient to determine whether a point with given
coordinates may belong to the area of concern.
USER = sum( … )
Initiates in the starting node a distributed process
(enclosed in braces) covering the whole disaster area
and finding casualty numbers in different places
(regions) in parallel, summing them in parallel too.
The final result will be displayed to the human
operator in the entry node (represented by
environmental variable USER). The top control of all
these (hierarchical) processes will remain in the
starting node.
hop(direct, Domain)
This tries to make a direct, parallel, electronic hop
from the starting node to as many directly reachable
units within the area in Domain as possible. The
hop may use for this any available means and
channels for finding such nodes (existing records,
databases, and cable, cellular, satellite or radio links,
with selective or broadcasting mode of operation).
The number of nodes accessed directly may be
limited, especially if the communication
infrastructures in the area are damaged, and also it is
far from the starting node.
repeat( … )
From the node(s) reached above, starts a spatial
navigation loop throughout the whole disaster area,
with the following two parallel branches in its body.
done(apply(casualties))
This first branch in each reached node activates
an external procedure casualties, which counts
the number of humans badly affected in the current
region, resulting in forming of an open value of this
branch. Enclosure of the branch by rule done
makes it also a terminal one in each node (i.e. from
which the spatial loop will not continue). The
casualties procedure may be fully automatic,
performed, say, by special observation robots;
automated, with manual use of electronic equipment
to check damages; or fully manual, with casualties
counted by people visually and then returned to the
electronic level via a terminal to the wave interpreter.
hop(anylinks, Domain, first)
This second branch of the loop tries to hop from
a node in the disaster area to other nodes of the same
area, given in Domain. It uses any available local
communication means from the current node which,
for example, may be registered in its mobile phone
as dial numbers of people this person knows and
communicates regularly. These may also be still
operating radio channels, usually of a limited
distance, or longer range Bluetooth-like direct
wireless communications used between different
mobile phones and PCs (i.e. not needing cellular
towers or Internet that may be damaged). And
finally, in the worst case, it may just be passing user-
friendly WAVE-WP commands and data by voice or
handwriting to other persons in direct contacts.
This hop assumes contacting as many
neighboring nodes and as simultaneously as possible.
To exclude duplications of actions on the same
request stemming from different neighbors, the
nodes will react only if the request comes to them
first time (additional parameter first in the hop).
In all the new neighbors reached by this parallel hop,
the full body of the loop, i.e.:
repeat( … )
will start again, with the terminal done branch
assessing casualties, and the hopping branch trying
to reach its own neighbors within the area,
prolonging the loop until there are neighbors visited
first. The terminal branches will leave casualty
numbers in all nodes reached in the area, which will
subsequently be summed up, returned, and finally
output to the USER.
On the internal implementation layer, invisible
for a user, this spatial repetitive parallel program
forms a runtime spanning tree covering (if
communications permit) the whole disaster area via
ICINCO 2006 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
62
the embedded and reached wave interpreters in it,
with the discovered local casualty numbers
suspended in all the tree nodes. These numbers are
subsequently collected and summed up in parallel
when echoing from the fringe nodes and up the tree,
finally receiving the total number of casualties at the
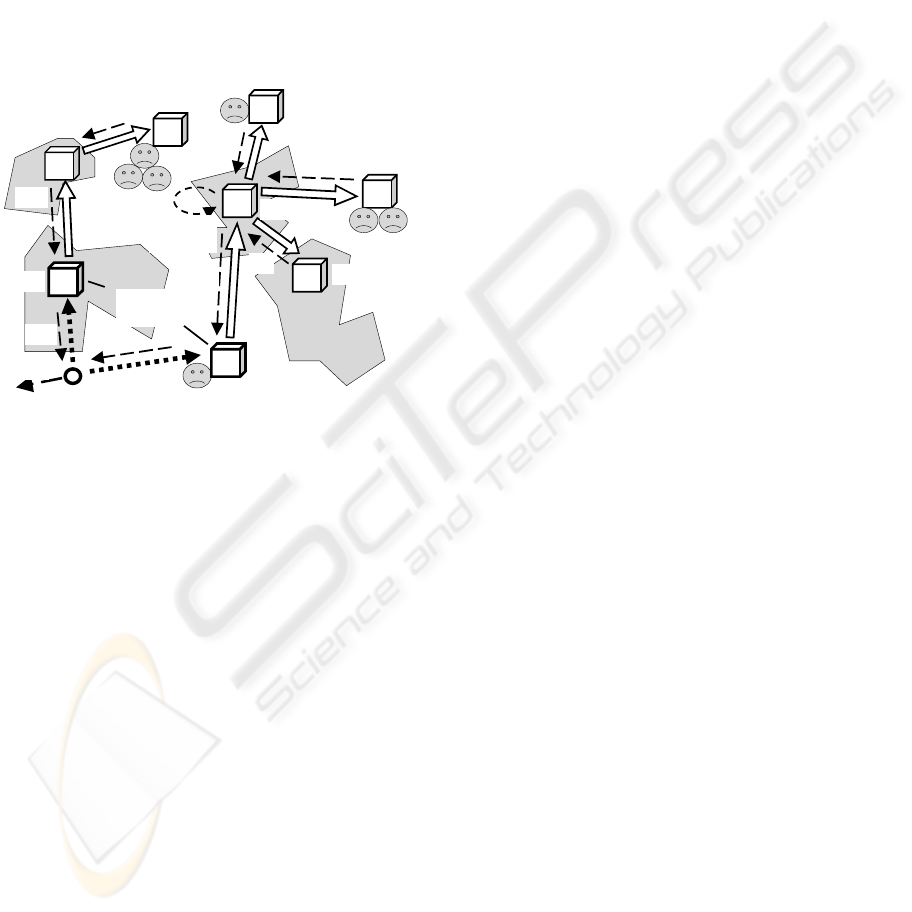
root node. As can be seen, the whole disaster area
has been effectively converted into a runtime
parallel spatial (here tree-structured) machine,
capable of solving the problem in a fully distributed
manner and without any central computational
resources, as shown in Fig. 7.
WI
WI
WI
WI
WI
WI
WI
WI
Waves
Merging
results
Start
Responding
nodes
25
14
45
31
77
36
96
8
120
108
204
128
31
14
25
45
332
Returning
results
Figure 7: Spatial counting of the total number of casualties.
5.2 Delivery to an Affected Region
If to use echo rule max instead of sum of the
previous program, and also lift physical coordinates
of the navigated regions, it is possible to get the final
result on the disaster area as an aggregated
maximum casualties-location value, as follows:
frontal(Domain); nodal(Max);
Domain = <disaster area>;
Max =
max(
hop(direct, Domain, random);
repeat(
done(apply(casualties)_WHERE),
hop(anylinks, Domain, first)))
The first part of the result in nodal variable Max at
the entry node will give the number of casualties of
the most affected region, and the second part will
provide physical coordinates of this region. The
latter -- as measured from physical position of the
related WI by using a special environmental variable
WHERE associated, say, with GPS devices.
The underscore here represents an aggregation
act, with the first part of the compound values
obtained in all regions behaving as keys for the
spatial rule max (operating in parallel on the runtime
spanning tree of the whole area). The second part
serves just as an attachment to this key.
Using the obtained value in Max, it is easy to
describe in WAVE-WP an assemblage of the needed
number of relief packages for the most affected
region (as objects “relief”, with physical matter
in the language identified by double quotes). These
objects can be multiplied on the number of
casualties (as the first part in Max, using the colon as
an indexing act), with assignment of the physical
result to frontal variable Supply, as follows.
frontal(Supply);
Supply = “relief” * Max:1;
hop(direct, Max:2);
apply(distribute, Supply)
The rest of the program provides direct movement
into a physical location identified by the second part
in Max, and distribution, upon reaching the
destination, of the relief packages between
individuals that may need them, using external
(manned, or robotic) procedure distribute.
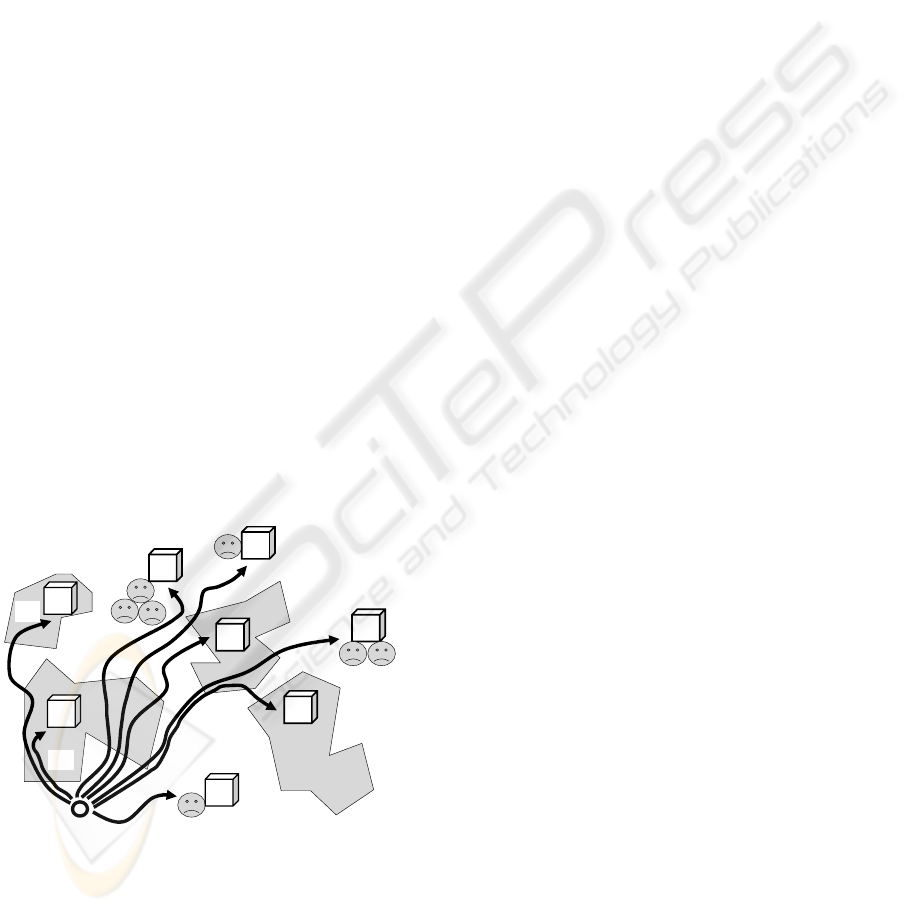
5.3 The Delivery to All Regions
It is easy to modify the previous two programs in
order to find casualty numbers separately on all
affected regions, with corresponding coordinates of
these regions, and then pack the needed amount of
goods for every region and forward all these to the
proper destinations, with a subsequent distribution.
The collection of casualty numbers on all regions
of the disaster area will be as follows:
frontal(Domain); Nodal(All);
Domain = <disaster area>;
All =
collect(
hop(direct, Domain, random);
repeat(
done(apply(casualties)_WHERE),
hop(anylinks, Domain, first)))
After the spatial work of this program, in a nodal
variable All at the entry node will be the list of
aggregated two-point values on all regions reached
in the parallel distributed loop. The following
program splits the list on its aggregated scalar values
to be used in parallel by the rest of the program.
DISTRIBUTED EMERGENCY MANAGEMENT WITH SPATIAL SCENARIOS
63
frontal(Supply);
split(All);
Supply = “relief” * VALUE:1;
hop(direct, VALUE:2);
apply(distribute, Supply)
After splitting, the rest of the program will replicate
on the implementation layer into identical branches
with different starting open values (the latter
accessed by an environmental variable VALUE
individual for each branch). Each branch prepares its
own physical collection of relief packages for the
corresponding region (using first part of VALUE),
which will be delivered by individual coordinates for
this branch & region (second part of VALUE).
The above two programs can be effectively
integrated into a single spatial program, as follows:
frontal(Domain, Supply);
Domain = <disaster area>;
split(
collect(
hop(direct, Domain, random);
repeat(
done(apply(casualties)_WHERE),
hop(anylinks, Domain, first)
)));
Supply = “relief” * VALUE:1;
hop(direct, VALUE:2);
apply(distribute, Supply)
The needed number of packages will be
delivered to the related destinations via routes
available, as shown in Fig. 8.
WI
WI
WI
WI
WI
WI
WI
WI
Start
77
96
31
14
36
25
45
8
Figure 8: Delivery of the goods to affected regions.
This may take into account the remaining usable
road infrastructures, also peculiarities of the terrain.
This delivery may be performed by manned vehicles
or convoys, or by advanced unmanned mobile
ground systems like those described in (Joint
robotics, 2005). Any concrete delivery, including
path finding and avoidance of obstacles, can be
effectively represented in WAVE-WP, with related
examples discussed and programmed in (Sapaty,
1999, 2005).
6 MORE MANAGEMENT ISSUES
In a similar way, it is easy to describe and execute
much more complex spatial scenarios of both
external supervision and self-organization of
affected regions. These may include massive
evacuation, forming new, emergency infrastructures,
fighting malicious post-disaster inclusions and
groupings (linked with terrorism and looting, for
example), movement and spreading of external relief
teams cooperating with each other and with the self-
organizing disaster area, and so on. The following
are some details on other important EM-related
problems, which are currently being investigated
with the use of WAVE-WP.
6.1 Distributed Data Mining
The currently performed data mining for a search of
suspected individuals is often restricted, mostly in
localized databases, as can be understood from
(Markoff, 2006). But very different and mutually
complementary information about, say, a suspected
criminal can simultaneously be present in many
databases throughout the globe, and she may have
many (stable, as well as casual) links with other
persons – also scattered in different databases.
The persons of interest and their groups may be
on a constant move, leaving dynamically
(temporary) records in different databases (say, in
airports by registering their tickets, also by video
cameras installed at the departures and arrivals).
Links between these persons -- from direct, voice, to
electronic via Internet or mobile phones -- may vary
rapidly during runtime. The WAVE-WP technology
provides for an effective finding and tracing of
single and multiple persons/objects, discovery of any
imaginable (and so far even unimaginable) patterns
of possible relations between them (which may be
fuzzy, dynamic, and situation dependent) throughout
the whole world in a highly automated, including
fully automatic mode, often ahead of time. The
model does not need any central databases for this,
using in parallel many computers with databases
directly where they are located, without copying the
information and its subsequent collection for central
processing (such a collection can make dynamic
ICINCO 2006 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
64

information useless, actually dead).
The technology just treats the whole world with
all its available databases as a parallel
supercomputer/global knowledge base, and spatial
programs for it can be injected from any point,
covering the distributed virtual world (or its parts
needed) at runtime and in parallel. No other existing
approaches can compete with this so far.
6.2 Tracing Uninhabited Containers
The cargo containers traveling throughout the world
may pose a serious threat due to the potential
possibility of spreading unregistered hazardous
objects and materials (Our porous port protections,
2006). Their great numbers, movement on large
distances by different kinds of transportation means,
and between and through different countries, make
their supervision a serious problem for any existing
systems and technologies.
With the technology described in this paper we
can dynamically (and if needed, secretly) attach an
individual mobile intelligence to each container and
trace its movement worldwide, in parallel with
millions of other such intelligences. This can also
guarantee their regular remote reporting on the cargo
states and direct interaction with other such
intelligences, if needed. These multiple tracking
intelligences can effectively cooperate with other
important EM systems, for example, those providing
worldwide search for suspected individuals and
organizations, as in the previous section.
All this can be organized in WAVE-WP fully
automatically, without human involvement, by
“infecting” the world with a powerful supervisory
“supervirus”, massively penetrating into any
infrastructures and services, while preserving its
own global integrity and goal orientation.
6.3 Memetics
Memetics, which proclaims stable self-reproducing
and propagating information structures of higher
levels, or memes, analogous to genes in biology, has
so far been considered by many as a doubtful and
controversial discipline (Finkelstein, 2006). But it
can contain, in principle, high philosophical
potentials for explaining and solving complex
problems in human societies, which may help, for
example, understand and fight terrorism globally --
if this materializes into practical methodologies,
technologies, and tools. We can assume that memes,
from the engineering point of view, are distributed,
evolving and dynamic spatial structures, or patterns,
not observable from local points as a whole, and
therefore so hardly comprehendible by single human
brains. Using WAVE-WP approach, we can
automatically discover, study, and comprehend
spatial memes spatially, much superior to a localized
human brain. Moreover, the technology can apply
spatial memes spatially too, in parallel, effectively
impacting societies as a whole.
We can imagine a large distributed system, say, a
country or an army. A meme for us may be a
persistent complex pattern with hidden self-
replicating and self-evolving algorithm deeply
integrated with its structure (i.e. forming an active
spatial pattern). In WAVE-WP, we can describe any
such pattern in a highly dense, recursive form. We
can then apply this pattern to the same or any other
system, starting form any point, in a parallel
matching & covering mode. We can modify the
whole system to fit this pattern, or change the
existing patterns in it to fit the one we have just
injected. We can also implant into any system some
higher-level patterns (or "meta-memes") that can
discover the existing spatial patterns (memes) in it,
copy them spatially, wrap in the WAVE-WP
recursive syntax, transfer to other parts of the system
or to other systems, and unwrap there, with runtime
covering and updating these systems or their parts as
needed. Many related programs have been written in
WAVE, efficiently working in a distributed mode
via the Internet (Sapaty, 2006).
The memes, whether they really exist or not as
physical or virtual entities, may in any case inspire
us for a search of higher-level mechanisms and
abstractions in human societies in order to influence
them properly, with application in emergency
management and terrorism fight too, and especially.
7 CONCLUSIONS
A dynamic and ubiquitous approach for emergency
management has been proposed, based on the
distributed processing and control technology
WAVE-WP. Operating in a different space-time
continuum than the existing systems or forces that
can harm them, it can set up any needed control over
the distributed worlds. The compactness and
simplicity of relief scenarios in the WAVE-WP
language can allow us to program them on the fly,
reacting timely on rapidly changing situations. The
technology can effectively convert scattered human
and technical resources into operable distributed
systems, autonomously solving complex self-
survivability and self-recovery problems. The
DISTRIBUTED EMERGENCY MANAGEMENT WITH SPATIAL SCENARIOS
65

implementation of the technology can be easily done
on any existing software or hardware platform, and
the corresponding “social” module, as a software or
hardware wave language interpreter, can be readily
installed in many wearable devices, and first of all
mobile phones and handheld and laptop PCs.
As WAVE-WP technology allows us to set up
the formal description of what was considered
predominantly human activity before, the relief
scenarios can be effectively performed by any
combination of multi-agent (Sapaty, Filipe, 2005)
manned and unmanned units. With this approach,
humans and robots will not only perform complex
relief operations together, but will also share
responsibility for key decisions in different space-
time locations. Massive use of advanced mobile
robotics in the future relief missions, and its
integration with manned components under the
unified command and control, can be drastically
simplified by this flexible control model too.
In this paper, only the spatial WAVE-WP
automaton and examples of programming in it with
relation to emergency management problems have
been briefly described. Of course, the EM managers
will be relieved from most of this internal relief
mission programming “kitchen”, as there will be
user-friendly interactive facilities with graphics,
video, and audio interfaces. But the technology users
should also be taught how to think and act like
generals rather than privates on the disaster
“battlefields”, in order to reduce the necessity of
keeping special qualified system programmers, and
quickly react in the emergency situations themselves.
REFERENCES
3G industry optimistic for 2006, 2005. BBC NEWS,
Technology, 25 November, http://news.bbc.co.uk/.
Bullock, J. A., Haddow, G. D., 2004. The future of
emergency management. Journal of Emergency
Management, Volume 2, Number 1, pages 19-24.
http://www.pnpco.com/.
Finkelstein, R., (Compiler & Editor), 2006. A Memetics
Compendium: Vol. 1, 2. In Workshop on Memetics.
Executive Conference Center of Strategic Analysis
Inc., Arlington, Virginia.
GPS mobile phone, 2006.
http://www.easydevices.co.uk/pcp/Mobile_Phone.html.
Joint robotics program, master plan FY 2005, 2005. US
Department of Defense.
http://www.jointrobotics.com/activities_new/masterpla
n.shtml.
LaFraniere, S., 2005. Cellphones catapult rural Africa to
21st century. The New York Times, August 25.
www.NYTimes.com.
Markoff, J., 2006. Taking spying to higher level, agencies
look for more ways to mine data, The New yor Times,
February 25. www.nytimes.com.
Mobiles head for sales milestone, 2005. BBC NEWS,
Technology, 19 July. http://news.bbc.co.uk/.
National Infrastructure Protection Plan, Draft, 2005. US
Department of Homeland Security, Office of the
Assistant Secretary for Infrastructure Protection, 161p.
www.dhs.gov.
National Response Plan, 2004. US Department of
Homeland Security, 95p.
http://www.dhs.gov/interweb/assetlibrary/NRPbasepla
n.pdf.
Nunn, S., 2005. Preventing the next terrorist attack: the
theory and practice of homeland security information
systems. Journal of Homeland Security and
Emergency Management, ISSN 1547-7355, Vol. 2, Iss.
3. http://www.bepress.com/jhsem/.
Our porous port protections, 2006. The New York Times,
Editorial, March 10. www.nytimes.com.
Samsung i730, 2005.
http://www.vzwshop.com/samsungi730info/.
Sapaty, P. S., 1999. Mobile Processing in Distributed and
Open Environments, John Wiley & Sons, ISBN:
0471195723. New York, 436 p.
Sapaty, P., Sugisaka, M., Mirenkov, N., Osano, M.,
Finkelstein, R., 2005. Grasping the distributed entirety.
In AROB 10
th
. The Tenth International Symposium on
Artificial Life and Robotics. Beppu, Japan.
Sapaty, P. S., 2005. Ruling Distributed Dynamic Worlds,
John Wiley & Sons, ISBN 0-471-65575-9. New York,
256p.
Sapaty, P., Filipe, J., (Eds.), 2005. Multi-agent robotic
systems. Proceedings of the 1
st
International
Workshop on Multi-Agent Robotic Systems MARS
2005. Barcelona, Spain, September 2005, INSTICC
PRESS, ISBN: 972-8865-34-1, 200p.
Sapaty, P., Sugisaka, M., Finkelstein, R., Delgado-Frias, J.,
Mirenkov, N., 2006. Emergent societies: an advanced
IT support of crisis relief missions. In AROB 11
th
. The
Eleventh International Symposium on Artificial Life
and Robotics, Beppu, Japan.
Sub-$100 Laptop Design Unveiled, BC NEWS,
Technology, 29 September 2005,
http://news.bbc.co.uk/.
Wave system public domain, 2003.
http://www.ece.ubc.ca/~sergiog/wavefiles/.
ICINCO 2006 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
66
