
SPECIFICATION AND IMPLEMENTATION OF MULTI-AGENT
ORGANIZATIONS
Fatemeh Ghassemi, Naser Nemat Bakhsh, Behrouz Tork Ladani
Department of Computer Engineering, Isfahan Universityt,Isfahan,Iran
Marjan Sirjani
Department of Electrical and Computer Engineering, University of Tehran, Tehran, Iran
Keywords: Organization, Formal Model of Organization.
Abstract: Multi-agent systems are used as a solution for complex and distributed systems. Since agents are autonomous they
can be coordinated exogenously by a coordination language Reo. Reo coordinates agents without having any
knowledge about agents. We apply organizational concepts to analyze and design such systems. In this paper, we
propose a formal model to specify the results achieved during these phases. This formal model helps in designing a
coherent and consistent system. The formal model is applied to make the implementation of system by Reo
systematically. We will specify and implement system by Reo according to the formal model. This paper also
defines how to convert the formal specification to a Reo circuit by providing Reo circuits for the different patterns
of interaction protocols and how to compose simpler circuits to support more complex patterns.
1 INTRODUCTION
Autonomous agents and multi-agent systems
(MASs) are widely used by developers to design
complex and distributed systems such as e-learning
and e-marketing systems and business-to-business
applications. An agent provides a behaviour
abstraction which allows the developers to naturally
model and construct complex systems.
In the context of MASs, the autonomous and
proactive behaviour of agents suggests that applications
can be designed by mimicking the behaviour and
structure of human organizations. Thus the architecture
of a multi-agent system can be naturally viewed as a
computational organization, which consists of a
multitude of autonomous and interacting agents. Each
agent plays one (or more) specific roles. However, the
organization of a multi-agent system is distinct from
the individual agents that populate the system
(Zambonelli et al., 2000; DeLoach, 2002; DeLoach and
Matson, 2004). While agents play roles within the
organization, their roles do not constitute the
organization. Roughly speaking organizations are
characterized by the organizational structures as well as
organizational rules that define the requirements for the
instantiation and operation of the organization as well
as constraints on agent behaviours and interactions
(Zambonelli et al., 2000; DeLoach, 2002).
Organization defines and coordinates agent
interactions. So a multi-agent system is defined by a set
of agents and its coordination (Dastani et al., 2005). We
only consider the external behaviour of agents. Agent
organization can be open, where agents enter or leave
dynamically. Thus agents are not known to each other
and they may not be honest to each other. However
there are some problems in the specification and
implementation of an open organization as follows:
• Participants in an organization should have a
common understanding of the organizational rules and
organizational structure. We consider the source of this
problem the use of protocol specification languages
with poor formal semantics.
• Some of agents in a large organization may make a
new sub-organization to cooperate for a specified task.
Since agents are autonomous, they are not affected by
this organizational changes and it is the responsibility
of the organization to manage dynamic changes.
Supporting such characteristics for an organization
requires implementation to have the ability to adapt
changes in organization policies.
447
Ghassemi F., Nemat Bakhsh N., Tork Ladani B. and Sirjani M. (2006).
SPECIFICATION AND IMPLEMENTATION OF MULTI-AGENT ORGANIZATIONS.
In Proceedings of WEBIST 2006 - Second International Conference on Web Information Systems and Technologies - Internet Technology / Web
Interface and Applications, pages 447-453
DOI: 10.5220/0001256204470453
Copyright
c
SciTePress

• There is always a gap between system specification
and implementation.
In this paper, we apply the coordination language
Reo to address above problems. Reo has a formal
semantics and is dynamically reconfigurable. To
implement an organization using Reo language, we
propose a formal model to specify the organization of
multi-agent systems. Then we use Reo to implement
the specification of the organization. Applying the
formal specification makes the implementation process
by Reo language systematically. We can use the formal
semantics of Reo to evaluate the properties of the
organization and overall system performance, security,
flow of information, etc.
Structure of the paper: The organization metaphor is
described in Section 2. In Section 3 we explain the Reo
concepts and in Section 4, we explain our formal model
for an organization. In Section 5, we explain how to
implement an organization by Reo language. In Section,
6,we specify and implement an example system using
our formal approach. Finally in Section 7, we explain our
concluding remarks and future works.
2 ORGANIZATION
In the traditional design of concurrent and distributed
systems, the architecture is derived from the
decomposition of functionalities and the data required by
system to achieve its goals as well as the definition of
their inter-dependencies. However, using organizational
concepts to design such systems, leads to a number of
agents, each with specific roles in the system. In this
model, agents interact to accomplish their tasks and,
agents embed most of the functionalities they need, so
the interactions of agents are reduced which makes the
design less complex and easier to manage. Most MASs
are intended to support or control some real-world
organizations. In such cases, an organizational-based
MAS design reduces the conceptual distance between
the software system and the real world system it has to
support.
An organizational structure defines the specific class
(among the many possibilities) of organization and
control regime to which the agents/roles have to conform
in order for the whole MAS to work efficiently and
according to its specified requirements (Zambonelli et
al., 2000). These organizational structures are usually
described in terms of a variety of social and
organizational concepts such as norm, trust, power,
delegation of task, responsibilities, permission, access to
resources and communication (Dastani et al., 2005). The
organization structure defines admissible actions of agent
interactions. For instance when there is delegation
relation between two agents, one agent can delegate task
to another agent. So, the delegating agent has a
delegation action in its interaction protocol.
Organizational rules express general, global (supra-
role) requirement for the proper instantiation and
execution of a MAS (Zambonelli et al., 2000; DeLoach,
2002). These rules indicate some constraints between
two communicating agents or an agent and organization.
3 REO CONCEPTS
Reo is a channel-based exogenous coordination
language based on the calculus of channels (Arbab,
2004; Arbab and Rutten, 2003; Arbab, 2003). Reo
consists of components that are connected via complex
coordinators, called connectors or networks, which
coordinate their activities. Connectors are
compositionally built out of simpler ones. The simplest
connectors in Reo are a set of channels with well-
defined behaviour supplied by the users (Arbab, 2004).
Agents communicate with each other by means of I/O
operations they perform through the I/O interfaces of
the connectors. The connector imposes a specific
coordination pattern on agent actions without any
knowledge about their internal communications. A
channel has precisely two channel ends. There are two
types of channel ends: sink and source. A sink channel
end dispenses data out of its channel and a source
channel end accepts data into its channel.
A connector is a set of channels and channel
ends organized in a graph of nodes and edges.
Channels are joined together in a node, so, a node is
a construct which consists of a set of channel ends.
Reo provide two types of operations: topological
–ones that allow manipulation of connector topology
and IO – ones that allow input/output of data. Reo
enables components to connect and perform I/O on
the connector, namely read, take and write.
Topological operations are join and split, because of
space limitation we do not explain them here.
As we mentioned earlier, Reo has operational
semantics (Arbab, 2003). The semantics of a Reo
connector is defined by the composition of the semantics
of its channels and nodes. Users define the semantics of
channels and Reo defines the semantics of nodes.
Arbab has defined a set of complete channel
types (Arbab, 2004), namely Sync, Filter,
SyncDrain, LossySync, and FIFO-1. Figure 1 shows
the visual notation for these channels.
Figure 1: Visual notation for basic channels.
WEBIST 2006 - WEB INTERFACES AND APPLICATIONS
448

The “Exclusive Router 2” connector is shown in Fig 2.
This connector has one input and two output ports.
When a data is written on the input port, it can be read
only by one of the components reading from the output
ports.
Figure 2: Exclusive Router 2 connector.
We can use abstraction notation to hide the internal
structure of the connectors using a box and interface
ports on its border. The abstract notation of “Initially
Closed Valve” connector is shown in Figure 3. This
connector is initially closed which implies that when a
data is written on its input port ‘a’, it won’t flow through
the connector until a data is written on the ‘c’ port (by
the administrator) and the valve is opened.
Figure 3: Abstract notation of “Initially Closed Valve” connector.
The “Initially Opened Valve” connector is the same as
“Initially Closed Valve” but data can flow from producer
to consumer until administrator closes the valve.
4 FORMAL MODEL
As described in Section 1, an organization coordinates
agent interactions. Thus an organization can be viewed
as a coordination artifact that coordinates the behaviour
and interactions of agents in terms of long-term goals
of system. We consider organization as an open
system, where agents are self-interested and can enter
and leave organization dynamically.
A formal model has been proposed in (Omicini et al.,
2004) to specify an environment-based coordination
artifact. In the environment-based coordination model,
agents are coordinated via data existed in the
environment. Thus, agents do actions using operations
defined by the user interface of the artifact. When artifact
receives an action, it is responsible to execute the action,
and reify proper data to keep track of agent actions.
These data define the coordination status of the
coordination artifact. In this model, agents do not have a
direct communication and they communicate via data
reserved in the environment. The operating instructions
of the artifact define for each agent how to exploit
coordination service.
We have extended the formal model proposed in
(Omicini et al., 2004) with organizational concepts to
specify an organization. The usage interface defines
what actions an agent can do and the set of operating
instructions defines the interaction protocol between
agent and organization. The coordination behaviour
of the artifact defines how the organization
coordinates the interactions of agents. In our model,
agents can communicate directly, which may be
synchronous or asynchronous.
An organization is specified by a tuple 〈R, A, ψ,
α, β, ρ, δ, →
σ
, γ〉. Some of these parameters are in
common with the model in (Omicini et al., 2004).
The set R defines the set of roles required within the
organization to reach its goals. The set A defines the
set of agents and the roles they play.
Agent-oriented methodologies such as Gaia
(Wooldridge et al., 2000) and Tropos (Giorgini et al.,
2004), specify an organization in terms of roles and their
interaction relation/structure, which are usually modelled
as interaction protocols. In (Grossi et al., 2005) three
relations are distinguished between roles, i.e., power,
control, and coordination. So, agents can interact by
delegating tasks to each other, passing information to
each other, or taking responsibility for each other. The
meta-variable ψ is the set of binary relations, which
defines the organizational structure of MAS in three
dimensions of control, power and information:
ψ::= {power(r,s), control(r,s), inform(r,s), r,s
∈
R}
These relations are not limited and users can define
other (social) relations. For instance, the power relation
specifies the agent enacting role r delegates tasks to the
agent enacting role s. Note ψ is exploited to cross-check
the consistency between organizational structure, agent
interaction protocols and the coordination behaviour. For
example when a power relation exists between two roles,
the delegating agent is allowed to delegate a task and the
delegated agent should receive the task either
synchronously or asynchronously.
The meta-variable α ranges over the operations
allowed by the organization to the agents and it
defines the actions an agent can do/initiate. The
meta-variable β ranges over the perceptions of action
completion and it may contain some information
about the outcome of the action. Therefore, the set L
of interactions between agents and the organization,
ranged over by l, is defined by the syntax as follows:
SPECIFICATION AND IMPLEMENTATION OF MULTI-AGENT ORGANIZATIONS
449

l ::= id!α | id?β
The id!α represents an agent identifier id,
executes an action α, and id?β represents agent id
perceives the completion β for the action α.
The function ρ associates to each agent identifier id
the usage instruction I he is committed to follow in the
organization and it defines the admissible actions and
perceptions. Instructions can be defined by exploiting
typical process algebra operators, i.e. by the syntax:
I ::= 0 | !α | ?β | I+I | I;I | I||I
Where, 0 is the void instruction, !α is execution of
an action, ?β is perception of a completion, operator
“+” is used for choice between instructions, “;” for
sequential composition of instructions and “||” for
parallel composition of instructions. The definition can
be recursive. As an example, the definition I:= !α ; (?β
|| I) means that the agent is initially allowed to do an
action α and later, while it can do the whole protocol
again, doing another action of α, it can perceive the
completion of previous actions (i.e. β) of α.
The meta-variable δ ranges over the data reified
into the organization (like databases or temporary
containers) to possibly keep information of
organization. Agents may not communicate directly
with each other to coordinate their actions, thus they
reify data into the organization which then taken by
another agent to coordinate their behaviours. The
meta-variable σ ranges over the set of Σ of states of
the organization, which is defined as follows:
σ ::= 0 | δ | l | (σ || σ )
The operator || is characterized by the following rules:
σ||0
↑
σ , σ || σ'
↑
σ' || σ , σ || (σ' || σ'')
↑
(σ || σ') || σ''
Thus, each state σ is defined by the parallel
composition of elements δ and interactions l. The l is
used to represent the pending actions to be executed
and pending completions waiting to be perceived.
The state of organization is changed when an
interaction occurs and is modelled by the transition
relation →
σ
⊆
Σ
×
Σ, representing the fact that a state σ
may eventually move to another σ', when a new pending
action has to be computed which typically causes a
change in the data reserved into the organization.
The meta-variable γ ranges over the first order
predicates to define the organizational rules using
prepositional logic. It is defined by the syntax as follows:
γ::= a |
¬
γ | γ
∧
γ | γ
∨
γ
Where “a” is the set of atomic propositions existed
in the organization. These rules usually define the
pre-conditions required for the interactions between
agents, or an agent and the organization.
The coordination behaviour of organization is
described by a transition system
〈
C, →, L
Υ
{τ}
〉
. C is
the set of configurations of the organization, which is
defined by the composition of ρ and σ shown by ρ
⊗
σ,
where the function ρ associate to each agent the
instruction it currently has to follow, and the σ defines
the current state the organization. The transition
function →
ζ
C
ξ
L
ξ
C is defined by below rules:
ασρσρ
ρ
α
α
!||][
)(
!
!
idIid
Iid
id
I
⊗⎯⎯→⎯⊗
⎯→⎯
a
Rule 1
σρβσρ
ρ
β
β
⊗⎯⎯→⎯⊗
⎯→⎯
][?||
)(
?
?
Iidid
Iid
id
I
a
Rule 2
σρσρ
σσ
τ
σ
′
⊗⎯→⎯⊗
′
⎯→⎯
Rule 3
The first rule defines an agent id can do/initiate an
action, if the ρ(id) allows this action and then this action
will reified in the state σ. The second rule defines the
completion β to action α; if this is reified into the state σ
and the ρ(id) allows perception of the completion. The
third rule is derived from the actual coordination task
inside the organization; when the →
σ
defines changes in
the states of the organization, there is a silent change in the
system configurations, which is shown by a silent
transition (τ).
5 MAPPING OF THE FORMAL
MODEL TO REO
Organization is a coordination artifact that can be
implemented using Reo, an exogenous coordination
language as explained in Section 3. We apply the formal
model of organization explained in Section 4 to make the
implementation of organization by Reo circuits
systematically. In this section, we show how to implement
an organization given the tuple 〈R, A, ψ, α, β, ρ, δ, →
σ
, γ〉.
The set of agent operations within an organization
is restricted to the operations that are allowed to the
agent by Reo on the connector interfaces: write, read
and take. Thus α is a proper subset of I/O operations
allowed by Reo for an organization. In Reo, an
operation is not started unless it can be completed, so
for these completions the β is trivial. These perceptions
that contain information should be defined by an extra
write and read operations that will be included in β.
An interaction connector is implemented for the
interaction protocol of each role and organization
connector is defined according to the transition relation.
The organizational rules are implemented by control
WEBIST 2006 - WEB INTERFACES AND APPLICATIONS
450
connector. When an agent enters into an organization, it
is committed to an interaction protocol, which can be
implemented by an interaction connector. Agents
initiate actions (read, take or write) via Reo circuits
which accepts an action if it is admissible, otherwise it
cannot be initiated. For the different interaction
protocol patterns commonly used (Zlatev et al., 2004),
we describe their corresponding Reo circuits. The Reo
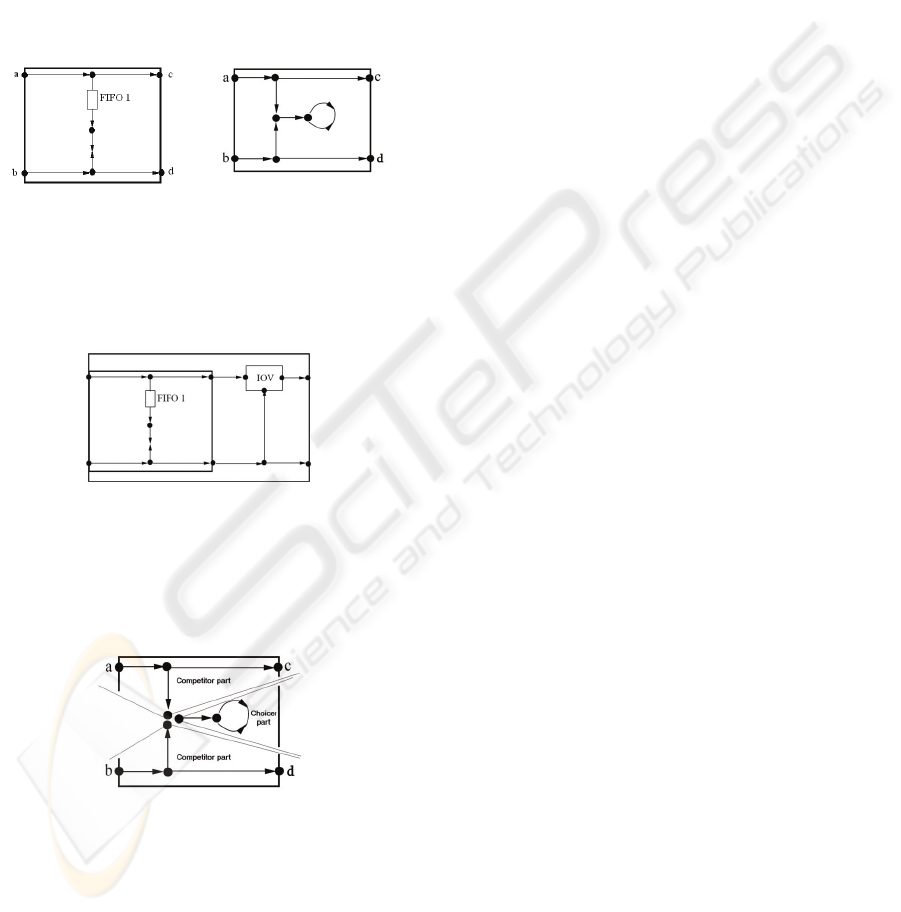
circuit for the interaction protocol I:=(a;b);I is shown
in Figure 4. We call this circuit Sequencer The Reo
circuit for the interaction protocol I:=(a+b);I is shown
in Figure 5. We call it Choicer during the paper.
Figure 4: The Reo
circuit for I:=(a;b);I
protocol.
Figure 5: The Reo
circuit for I:=(a+b);I
protocol.
If an “Initially Open Valve” circuit placed on the
way of the output c, the protocol changes into the
I:=(a;b) protocol, which is shown in Figure 6.
Figure 6: The Reo circuit implements the I:=(a;b)
protocol.
The Choicer circuit has two parts, namely
competitors and choicer parts as shown in Figure 7.
Figure 7: Different parts of the Choicer circuit.
The Reo connector implementing parallel
composition is defined in (Ghassemi, 2006).The →
σ
can
be implemented by Sync, SyncDrain and FIFO channels.
The FIFO channel has the ability to store data. Thus we
can use different capacities of FIFO to store data reified
into the organization. The δ meta-variables define the
outputs of agents that should be stored in a FIFO
channel. The →
σ
defines when a FIFO gets full and
empty or which actions should be synchronized.
The meta-variable γ place some restrictions
between an agent interaction and the organization or
between agent interactions. They can be implemented
by control connectors, which are placed between agents
and interaction connectors or within organization
connector and control the flow of data in the
connectors. Control connectors are usually
implemented by “Initially Open Valve”, “Initially
Closed Valve” and SyncDrain channel (Ghassemi,
2006).
Reo is a compositional model and complex circuits
are composed of simpler ones, which enable us to define
interaction protocols compositionally. We can define
complex interaction protocols by composing simpler
ones. We define three functions over a protocol namely
first, last and tail. The first function returns actions that
initiate the protocol. The tail function returns the
protocol by omitting the first actions from the protocols.
The definition of first function is shown as follows:
⎪
⎪
⎩
⎪
⎪
⎨
⎧
∨+++
∪∈
=
≠
);...;;()(
)||...||||()...()()(
211
2121
n
nn
II
i
IIIIfirst
IIIIIIIfirst
aa
Ifirst
i
U
βα
The last function defines the actions should be
done in order a protocol get finished. The definition
of last function is shown as follows:
⎪
⎪
⎩
⎪
⎪
⎨
⎧
∨+++
∪∈
=
≠
);...;;()((
)||...||||()...())(()(
21
2121
ni
nn
II
i
IIIItaillast
IIIIIIItaillast
aa
Ilast
i
U
βα
To define the composition of protocols under an
operator we specify the Compose(I
1
,I
2
,…,I
n
,op) function
for different op operations. Thus the Reo circuit for
Compose(I
1
,I
2
,…,I
n
,+) is implemented by implementing
the Reo circuit of Compose(first(I
1
),first(I
2
),…,first(I
n
),+)
where Compose(a,b, …,+) is implemented using
Choicer-n circuit. This circuit is easily implemented by
connecting competitor parts to the choicer part of a
Choicer circuit The Reo circuit for Compose(I
1
,I
2
,…,I
n
,;)
is implemented by implementing the
Compose(last(I
1
),first(I
2
),;) to Compose(last(I
n-
1
),first(I
n
),;), where Compose(a,b,;) is implemented by
Sequencer circuit.
The transition relation defines how the agent actions
should be coordinated with each other. In this step,
designer can decide to coordinate two actions
synchronously or asynchronously. For example when a
manager delegates a task to his employer, the send and
receive actions of manager and employer should be
SPECIFICATION AND IMPLEMENTATION OF MULTI-AGENT ORGANIZATIONS
451

coordinated. If they are synchronous, the appropriate ports
of their interaction protocols are connected directly to each
other; otherwise, a FIFO-1 channel is used to keep the
delegation, which is later taken by the employer.
Each agent that enacts a set of roles needs a set of
Reo circuits implementing the interaction protocols
required for each role.
6 EXAMPLE
In this section we specify and implement an online
store, where seller and buyer interact with each
other. The buyer can ask about the price of items and
pay money for an item and get the item. In return the
seller answers client questions and receives money.
The seller should opens the store before any client
can enter and does any interaction.
6.1 Formal Specification
The online store is an organization where the two roles,
seller and buyer exist (R). Thus agents playing role
within the store are seller and buyer each have roles of
seller and buyer respectively (A). There is a flow of the
information from the seller to the buyer in order to
inform the buyer about the price of items and there is
also a flow of money from the buyer to seller. Thus the
organizational structure is defined as follows:
ψ::= {inform(seller, buyer),pay(buyer, seller)}
The actions that the buyer and the seller agents
can do in the organization are shown as follows:
α ::= answer| ask(item) |get_money |pay_money(amount)| open
β::=OK
answer
|OK
ask
(price)|receive_money(amount)|OK
pay
(item)| Ok
open
The interaction protocols (ρ) for each agent is
defined according to the organizational structure as
follows:
Seller:=((!answer;?OK
answer
)+(!get_money;?
receive_money(a))+ open);Seller
Buyer := ((ask(item);?OK
ask
(price))+(pay_money(a);
?OK
pay
(item))) ;Buyer
The δ contains “start” which indicates that the
seller has opened the store. The transition relation
→
σ
is defined by the two simple rules:
id
seller
!open → Start || idSeller?open
Start || id
seller
!answer(item) || id
buyer
!ask(item) → Start ||
id
seller
?OK
answer
|| id
Buyer
?OK
ask
(a)
Start || id
Seller
!get_money || id
Buyer
!pay_money(a) → Start ||
id
Seller
?receive_money(a) || id
Buyer
?OK
pay
(item)
We can consider an organizational rule that when
a buyer can ask or pay money if the seller opens the
store. This rule is defined in the following:
Start ƒ(id
Buyer
!askϖid
Buyer
!pay)
In this formal specification, we can check the
correctness of interaction protocols and the
coordination behaviour of the organization
according to the organizational structure.
6.2 Reo Implementation
In this section we specify and implement online
store according to the formal specification and
mapping rules explained in Section 5. The α and β
are redefined as follows:
α ::= read
answer
(item)| write
ask
(item) | read
get-money
(amount) |
write
pay
(amount)
β ::= read
ask
(price) | read
pay
(item)
The interaction protocol for agents is redefined
as follows:
Seller:=((read
get-qu
(item);write
answer
(price))+(read
get-
money
(amount);write
give-item
(item))+write
open
);Seller
Buyer:=((write
ask
(item);read
answer
(price))+(write
pay
(amount)
; read
get-item
(item)));Buyer
The interaction connectors for each agent are defined
according to the interaction protocols and the interaction
connectors are connected to each other according to the
transition relation (organization connector). The
implementation of the store is shown in Figure 8.
Figure 8: Implementation of online store by Reo.
WEBIST 2006 - WEB INTERFACES AND APPLICATIONS
452

7 CONCLUSIONS
In this paper, we propose a formal model for the
specification of multi-agent organizations. This
specification formally defines what tasks an agent is
allowed to do in an organization and in
synchronization with which actions in the system. It
also defines what the pre-condition of each task is
and how the organizational structure affects on the
interactions between agent and the coordination
behaviour of organization.
We apply Reo coordination language to
implement organizations. To make the
implementation systematically, we use our formal
model to specify the system according to the Reo
I/O operations. We define how to convert
specification to the implementation by introducing
some Reo circuit for common interaction protocols
and how they can be composed to make complex
protocols. Reo not only provides a formal
specification but also provide an implementation.
Thus the Reo circuits are executable. There is a tool
to run Reo circuits (Dave, 2005).
We are going to find a mapping between process
algebra expressions into the Reo circuit. This
mapping enables us to automate the conversion of
specification by our formal model to a Reo circuit.
REFERENCES
Arbab, F., 2003. Abstract behavior types: A foundation model
for computers and their composition. In Proceeding of the
First International Symposium on Formal Methods for
Components and Objects(FMCO 2002), vol. 2852, pp 33–
70.
Arbab, F., 2004. Reo: A channel-based coordination model for
component composition. Mathematical Structures in
Computer Science, 14:329 – 366.
Arbab, F. and Rutten, J., 2003. A coinductive calculus of
component connectors., Recent Trends in Algebraic
Development Techniques, Proceedings of 16th
International Workshop on Algebraic Development
Techniques (WADT 2002), volume 2755, pages 35–56.
Clarck, D., 2005. Reo Lite. Internal report, Software
Engineering Department, CWI.
Dastani, M., Arbab, F., and de Boer, F. S., 2005. Coordination
and composition in multi-agent systems. In4rd
International Joint Conference on Autonomous Agentsand
Multiagent Systems (AAMAS 2005), July 2005, Utrecht,
Netherlands.
DeLoach, S., 2002. Analysis and design of multi-agent systems
using hybrid coordination media. In proceedings of
Software Engineering in Multiagent Systems.
DeLoach, S. and Matson, E., 2004. An organization model for
designing adaptive multiagent systems. In The AAAI-04
Workshop on Agent Organizations: Theory and practice.
Ghassemi, F., 2006. Analysis and Design of Multi-agent
Systems using Reo. Master Thesis, Isfahan University.
Giorgini, P., Kolp, M., Mylopoulos, J., and Pistore, M., 2004.
The Tropos Methodology: An Overview. In Methodologies
and Software Engineering for Agent Systems, Kluwer.
Grossi, D., Dignum, F., Dastani, M., and Royakkers, L. M. M.,
2005. Foundations of organizational structures in
multiagent systems. In 4rd International Joint Conference
on Autonomous Agents and Multiagent Systems, pp 690–
697.
Omicini, A., Ricci, A., Viroli, M., Castelfranchi, C., and
Tummolini, L., 2004. Coordination artifacts: Environment-
based coordination for intelligent agents. In proceeding of
3rd International Joint Conference on Autonomous Agents
and Multiagent Systems (AAMAS 2004), pages 286–293.
Wooldridge, M. and Jennings, N., 2000. The Gaia
Methodology for agent-oriented analysis and design.
Autonomous Agents and Multi-Agent Systems, 3(3):285-
312.
Zambonelli, F., Jennings, N. R., and Wooldridge, M., 2000.
Organizational abstractions for the analysis and design of
multi-agent systems. In Agent-Oriented Software
Engineering, First International Workshop, pages 235–
251.
Zlatev, Z., Diakov, N., and Pokraev, S., 2004. Construction of
negotiation protocols for e-commerce applications. ACM
SIGecom Exchanges, 5(2):12-22.
SPECIFICATION AND IMPLEMENTATION OF MULTI-AGENT ORGANIZATIONS
453
