
A METHODOLOGY FOR ADAPTIVE RESOLUTION OF
NUMERICAL PROBLEMS ON HETEROGENEOUS
HIERARCHICAL CLUSTERS
Wahid Nasri, Sonia Mahjoub and Slim Bouguerra
ESSTT, 5 Avenue Taha Hussein - B.P. 56, Bab Menara - 1008 Tunis, Tunisia
Keywords: Cluster computing, Adaptive techniques, Scheduling,
Parallel algorithms, Matrix multiplication problem.
Abstract: Solving a target problem by using a single algorithm or writing portable programs that perform
well is not
always efficient on any parallel environment due to the increasing diversity of existing computational
supports where new characteristics are influencing the execution of parallel applications. The inherent
heterogeneity and the diversity of networks of such environments represent a great challenge to efficiently
implement parallel applications for high performance computing. Our objective within this work is to
propose a generic framework based on adaptive techniques for solving a class of numerical problems on
cluster-based heterogeneous hierarchical platforms. Toward this goal, we refer to adaptive approaches to
better adapt a given application to a target parallel system. We apply this methodology on a basic numerical
problem, namely solving the matrix multiplication problem, while determining an adaptive execution
scheme minimizing the overall execution time depending on the problem and architecture parameters.
1 INTRODUCTION
Few years ago, there was a huge development of
new parallel and distributed systems. Large
collections of interconnected PCs (called clusters)
have replaced traditional super-computers in many
universities and companies. Due to the increasing
performance of on-the-shelf components, such low-
cost systems are a reasonable alternative for solving
a large range of applications.
However, the introduction of such parallel
syste
ms has a major impact on the design of efficient
parallel algorithms. Indeed, new characteristics have
to be taken into account including scalability and
portability. Moreover, such parallel systems are
often upgraded with new generation of processors
and network technologies. Today, as the systems are
composed of collections of heterogeneous machines,
it is very difficult for a user to choose an adequate
algorithm because the execution supports are
continuously evolving. One version will be well-
suited for a parallel configuration and not for
another. This portability issue becomes crucial
because of the frequent changes of the components
of the systems. These different elements require to
revise the classical parallel algorithms which
consider only regular architectures with static
configurations and to propose new approaches.
The adaptive approache
s are a promising answer
to this problem. The idea is to adapt algorithms
together with their execution to the target
architecture. These algorithms may be automatically
adapted to the execution context (data and support).
Our objective within this work is to propose a
gene
ric framework including the design of an
automatic selection mechanism, based on adaptive
techniques for dealing with scalability and
portability issues on cluster-based heterogeneous
hierarchical platforms for a class of regular
numerical algorithms. The proposed methodology
may be extended to a class of parallel applications
which can be partitioned in a set of independent
tasks (which may be non identical).
The remainder of the paper is organized as
fol
lows. We begin in section 2 by presenting the
architectural model of the target parallel and
distributed system and discussing some adaptive
approaches. In section 3, we describe our adaptive
framework and detail its components. Section 4 is
devoted to a case study where we apply our
methodology on the matrix multiplication problem.
Section 5 concludes the paper and discusses some
perspectives to extend this work.
345
Nasri W., Mahjoub S. and Bouguerra S. (2006).
A METHODOLOGY FOR ADAPTIVE RESOLUTION OF NUMERICAL PROBLEMS ON HETEROGENEOUS HIERARCHICAL CLUSTERS.
In Proceedings of the First International Conference on Software and Data Technologies, pages 345-350
Copyright
c
SciTePress

2 BACKGROUND
2.1 Description of the Architectural
Model
We assume in this work a generic model of a
platform composed of heterogeneous hierarchical
clusters as described in (Capello, 2005). The studied
platform enjoys heterogeneity along three
orthogonal axis : (a) The processors that populate
the clusters may differ in computational powers,
even within the same cluster, (b) The clusters
composing the platform are organized hierarchically
and are interconnected via a hierarchy of networks
of possibly differing latencies, bandwidths and
speeds. At the level of physical clusters, the
interconnection networks are assumed to be
heterogeneous, and (c) The clusters at each level of
the hierarchy may differ in sizes.
We will extend this architecture to a one where
the capacities of the links connecting clusters may
change dynamically during the execution of the
target parallel application.
2.2 Adaptive Approaches
It is well-known that no single algorithm can always
achieve the best performance of a sequential or
parallel application for different problem sizes and
number of processors on a target parallel system. We
can obtain good performances by mixing multiple
algorithms for solving the same problem, where
each algorithm can dominate the others in specific
contexts. Thus, we should determine the more
appropriate algorithm (which provides the best
performance) in terms of a set of parameters (size of
the problem, number of available processors,
performances of the interconnection network, etc.),
or to combine multiple ones for improving
performances to fit well the characteristics of the
target computational system. The software
mechanism responsible for determining the best
available choices at run-time is known as a
switching function. The optimal choice of algorithm
can be determined at run-time, typically by using
data obtained by monitoring tools, such as the NWS
(Network Weather Service) (Wolsky, 1997) which
permits to measure many useful information, such as
the hardware characteristics, the communication
bandwidth, the system load, or any input-data that
may influence the performance of the application.
The result of this mechanism is called adaptive
algorithm. This algorithm may use different
techniques to adaptively determine the best
algorithm. For instance, the algorithms presented in
(Frigo, 1998; Thomas, 2005) use respectively
machine learning and cascading techniques.
3 DESCRIPTION OF THE
ADAPTIVE METHODOLOGY
In this section, we describe our methodology for
adaptively executing parallel applications in an
execution environment characterised by its
heterogeneity and its hierarchical organization. An
overview of the methodology is sketched in figure 1.
The processing is separated in two successive
phases. During the first one, we aim to partition the
target platform to form subnets of similar
characteristics by automatically discovering the
network topology. Then, when executing the second
phase, we have to determine for each subnet (i.e.
cluster) the more appropriate algorithm among
multiple algorithmic options leading to the minimum
possible execution time of the given problem. We
will finally determine an adaptive execution scheme
identifying the details of the implementation. It is
worthy to note that we may have at a given time
different algorithms occurring on different clusters.
Moreover, it is possible to use a combination of
many algorithms to execute a task on the same
cluster. In the sequel, we more detail the major
components of the methodology.
Target execution platform Dynamic monitoring tool
Platform
p
artitionin
g
Performance prediction
and analysis
Figure 1: Adaptive methodology.
3.1 Partitioning the Platform
Since the target parallel system may be
heterogeneous at many levels (computing powers,
interconnection network performances, etc.), it is
very difficult to manage such platform towards a
high performance computing. One way to answer
this problem and to minimize the inherent
heterogeneity, and thus facilitating the execution, is
Ada
p
tive a
pp
roach
Clustering
Input algorithms Target problem
Adaptive algorithm selection
Adaptive execution scheme
ICSOFT 2006 - INTERNATIONAL CONFERENCE ON SOFTWARE AND DATA TECHNOLOGIES
346

to subdivide the network in homogeneous subnets
(or logical clusters), as described below. At the end
of this phase, we will obtain a set of logical clusters
of homogeneous interconnection networks, which
will be used to adaptively implementing algorithms
inside each cluster during the second phase of the
methodology.
3.1.1 Network Performance Measurments
The methodology starts by collecting available
information from the target execution environment
to be used in the step of clustering (see next section).
There exist many tools for network monitoring, such
as NWS (Network Weather Service). These tools
permit to determine many useful parameters of the
target parallel system like the current network status,
the communication latency, the speeds of the
processors, the CPU load, the available memory,
etc. For instance, the communication latency and
throughput permit to identify groups of machines
with similar communication parameters.
3.1.2 Clustering
One reason to construct logical clusters is that
machines may behave differently, and the easiest
way to optimise communications is to group
machines with similar performances (Barchet-
Estefanel, 2004). In order to classify nodes in logical
clusters, we can use a clustering algorithm similar to
the one presented in (Lowekamp, 1996). This
algorithm analyses each interconnection on the
distance matrix containing the latencies between
links in order to group nodes for which their incident
edges respect a latency bound (by default 20%)
inside that subnet. Note that the distance matrix was
obtained when applying NWS on the clusters to
determine the network information.
3.2 Adaptive Approach
Once the platform is partitioned in separated
homogeneous hierarchical clusters, we have at this
stage to determine, using an adaptive approach, the
more performant algorithm from a set of algorithms
reserved to solve the problem for each cluster. This
mechanism may lead to a collection of various
methods to be used at the same time on the available
clusters. Any necessary characteristics are measured
during the first phase corresponding to the network
partitioning. We recall that the adaptive decision is
made in terms of many information which might be
of interest, such as those related to the target
problem (size and type of data) and other ones
related to the architecture structure (interconnection
network, number of nodes, etc.). This phase ends by
fixing an execution scheme detailing the
implementation. Let us precise that the adaptive
algorithm selection is based on analytical models
able to predict performances of the parallel
application on the target platform.
3.2.1 Strategy of Task Allocation
Assume that we have to execute a set of tasks. Our
strategy requires to reserve a node (called
coordinator) for controlling the overall execution of
the tasks, and one node per cluster to be charged for
communicating with the other clusters.
The coordinator starts the execution by assigning
a task to each available cluster. Let us recall that
clusters may have different performances and tasks
may be non identical. Once a cluster finishes the
execution of its task, it sends a request to the
coordinator to get another task. Then, the
coordinator proceeds first by identifying the
necessary data to execute the task, which are
assumed to be distributed over the platform, their
locality (which clusters have the data), and then
determining the path minimizing the transfer cost.
3.2.2 The Makespan Improvement Phase
Let us remark that at the end of the execution
process, when the number of remaining tasks to
execute is less than the number of available clusters,
we can observe idle times which may be high
especially when the idle clusters are the fastest ones.
Figure 2 shows an example where we consider four
clusters (C1, C2, C3 and C4). At the instant t1, C4
finishes the execution of its allotted task. Then, it
asks the coordinator for another task. We assume at
this level that it remains only two tasks to execute.
C4 will be allotted a task and the last one will be
executed by C3.
At this stage, we propose a strategy inspired from
the technique of work-stealing (Blumofe, 1998) in
order to reduce the idle time and improve
performances. In this case, the first cluster becoming
idle at the instant t2 (here is C1) asks the coordinator
for identifying which cluster to be concerned with
the stealing. The coordinator, having a global status
of the execution process, determines the slowest
cluster in the sense that finishes last, and decides if it
will be performant to share the remaining portion of
the task on two clusters (the requester and the
slowest, i.e. C1 and C4 respectively). Similarly, the
task under execution on C3 will be shared with C2.
Let us mention here that sharing the execution is
achieved only if this processing is able to reduce the
execution time. Figure 2 shows a possible
improvement leading to a reduced global execution
time.
A METHODOLOGY FOR ADAPTIVE RESOLUTION OF NUMERICAL PROBLEMS ON HETEROGENEOUS
HIERARCHICAL CLUSTERS
347
t1 t2
C4
C3
C2
C1
C4
C3
C2
C1
Before improvement phase
After improvement phase
t1 t2
C4C4
C3C3
C2C2
C1C1
C4C4
C3C3
C2C2
C1C1
Before improvement phase
After improvement phase
Figure 2: Scheduling tasks and improvement phase.
4 CASE STUDY: MATRIX
MULTIPLICATION PROBLEM
We apply our adaptive methodology on a basic
numerical problem, namely computing the product
of two (large) dense square matrices. We begin by
discussing some related works, and then describing
our adaptive algorithm.
4.1 Related Works
The parallelization of the matrix multiplication
problem was widely studied in the literature.
Various optimized versions of this problem have
been implemented in libraries on all existing
(homogeneous or heterogeneous) parallel systems.
We may particularly refer to works presented in
(Beaumont, 2001; Desprez, 2004; Hunold, 2004;
Lastovetsky, 2004; Ohtaki, 2004) where various
methods have been applied, such as standard, fast,
mixed, etc. However, only few parallel adaptive
implementations have been developed.
However, to the best of our knowledge, no
original work has been devoted to implement
adaptive algorithms for matrix multiplication on
heterogeneous hierarchical clusters where both
computing resources and interconnection links are
heterogeneous. Moreover, the network capacity may
change dynamically during execution. The
contribution of this paper is to intend to fill this gap.
4.2 Based Algorithms
We will use three based algorithms in our approach.
The first one was designed by Beaumont et al.
(Beaumont, 2004) where classical matrix
multiplication algorithms have been implemented on
heterogeneous clusters. The algorithms presented are
very efficient but the distribution used is highly
irregular. The second algorithm is proposed by
Lastovetsky and Reddy (Lastovetsky, 2004) which
have extended a two-dimensional homogeneous
block-cyclic distribution to heterogeneous case that
provides perfect load balancing on a grid of
processors. The last algorithm is developed by
Ohtaki et al. (Ohtaki, 2004) where they propose a
recursive data decomposition, which enables both
efficient load balancing and incrementing of the
recursion level in Strassen's algorithm for
heterogeneous clusters. Let us precise that we may
use more based algorithms, but we will generate an
additional cost for the poly-algorithmic decision.
Idle
time
4.3 Description of the Proposed
Adaptive Algorithm
4.3.1 Data Distribution
Let A, B and C=A*B be three square matrices of
size n. We assume that due to a previous work, the
input matrices A and B are distributed on two
different clusters. Our objective here is to distribute
the matrices over the available clusters. To compute
C, we propose to partition the matrix into equal
square blocks of size r each. The size is chosen so
that we create coarse-grained tasks that are assigned
later to disjoint clusters. Computing a block of C
requires a row block of A and a column block of B.
So, the initial data distribution is a row block-wise
distribution for A and a column block-wise
distribution for B. We have now to allocate tasks on
(say x) available clusters. The initial allocation that
we adopt is presented in figure 3, where we allot
cyclically a column of blocks to each cluster. Let us
mention that this preliminary allocation will be
dynamically adapted during execution.
Figure 3: Task allocation on x clusters.
To be able to start computing blocks, we have to
send to each cluster a row block of matrix A and a
column block of matrix B. For a new block of the
same column block of matrix C, a cluster requires
only a row block of A. For a new column block of C
allotted to the same cluster, the later requires only a
column block of B for the first square block to
compute; for the remaining blocks, the cluster has all
necessary data. Since the fastest clusters will finish
the execution of their allotted tasks first, we will
apply the strategy described in section 3.2.2 to
Saved time
Computational
surface
Task shared by
C2 and C3
Task shared by
C1 and C4
ICSOFT 2006 - INTERNATIONAL CONFERENCE ON SOFTWARE AND DATA TECHNOLOGIES
348

reduce the idle time of these clusters when they have
no work to perform.
Remark that at the beginning, all clusters require
the same row block of matrix A to start execution.
Since the corresponding data is located in a one
cluster, we will have to broadcast it on clusters. Each
cluster can start its computation as soon as the data
is available. We describe in the following how to
schedule tasks during the execution.
4.3.2 Scheduling Tasks
Since our problem is reduced here to a set of
independent tasks, we will apply the approach
proposed in section 3.2. Let us describe the
methodology with an example. Consider the
platform presented in figure 4, composed initially of
three different clusters C1, C2 and C3, with a 1-Port
model and two level hierarchy networks with
different bandwidths and latencies. After applying
the first phase of the methodology corresponding to
partitioning the platform in logical homogeneous
clusters, C3 will be separated into two sub-clusters
C31 and C32. We assume here that the coordinator
is a node of C2, matrices A and B are initially
located in C31 and C2 respectively, and that the
matrix decomposition in blocks leads to 25 tasks to
be scheduled on the four clusters.
4.3.3 Adaptive Algorithm Selection
The selection of the best algorithm to execute a
given task is based on a performance matrix
containing the duration of each algorithm, among
the set of input algorithms, on each cluster. This
matrix is obtained using analytical models.
Formally, assuming a cost model, we denote by
P(Alg
i
,C
j
) the performance of algorithm Algi on
cluster Cj. Algi is qualified to be the best on cluster
Cj when P(Alg
i
,C
j
)=min{P(Alg
k
,C
j
), 1≤k≤q}, where
Figure 4: The platform after clustering.
Computational node
Coordinato
r
Switch
Network level 2
Network level 1
C1
C2
C31
C32
C3
q represents the number of available algorithms. It is
worthy to note that due to the diversity of clusters
composing the platform, we may have at a given
time various algorithms executing different tasks,
each on a cluster.
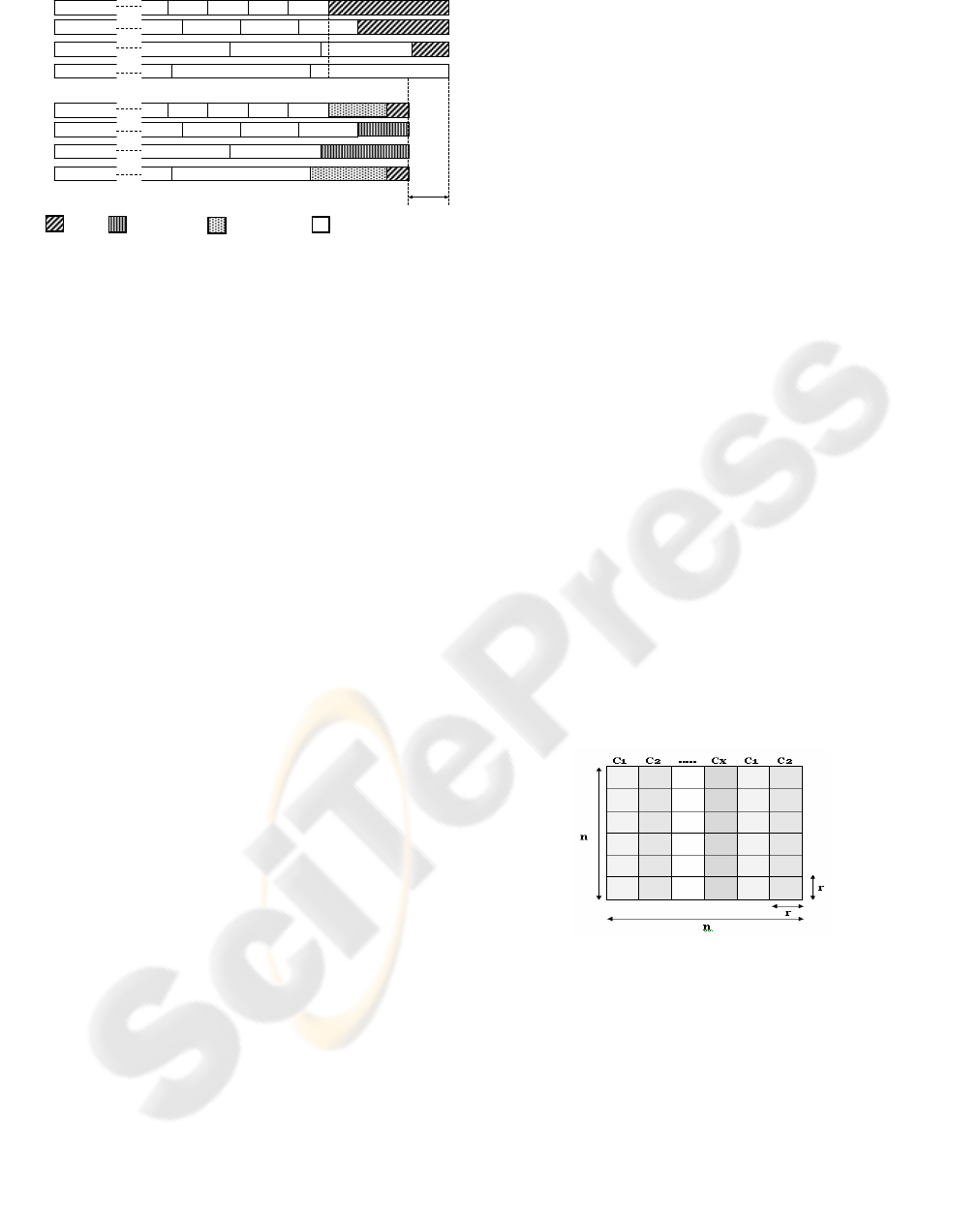
Figure 5 shows the scheduling of the different
tasks of the example presented previously when the
more performant algorithm is used on each cluster.
We assumed, since clusters are different in
computing powers, that the execution time of a task,
which remains unchanged using a given algorithm,
is different on two different clusters. We also
considered that overhead due to communicating the
same amount of data may change from an execution
to another due to a possible variation of the network
capacity.
5 CONCLUDING REMARKS AND
FUTURE WORKS
We have presented in this paper a new (two phase)
methodology based on adaptive approaches,
including the design of an automatic selection
mechanism, for dealing with parallel
T
24
T
34
T
51
Com
p
utational surface
Overhead due to communications
Idle time
T
11
T
21
T
31
T
41
T
55
T
13
T
23
T
33
T
43
T
53
T
44
T
54
T12 T22 T42 T52 T15 T25
T35
T45
T
32
T
13
T
23
T
33
T
43
T
53
T
44
T
54
T
51
T
12
T
22
T
42
T
52
T15
T25
T35
T45
T
32
T55
T
11
T21 T31 T41
T14
T24 T34
T51
Before improvement phase
C1
C31
C2
C31
C2
C1
C32
C32
After improvement phase
Saved time
Figure 5: Scheduling tasks before and after improvement phase.
A METHODOLOGY FOR ADAPTIVE RESOLUTION OF NUMERICAL PROBLEMS ON HETEROGENEOUS
HIERARCHICAL CLUSTERS
349

implementations of a class of regular numerical
algorithms and parallel applications which may be
partitioned in a set of independent tasks on cluster-
based heterogeneous hierarchical platforms. We
applied the approach on a basic numerical problem,
namely solving the matrix multiplication problem,
while achieving the minimum possible execution
time depending on the problem and architecture
parameters.
As future prospects, we first intend to validate
this approach by achieving experiments on real
platforms, and apply the methodology on other types
of parallel applications. We also plan to integrate
other existing adaptive approaches to our framework
to benefit from the powerful of these techniques.
REFERENCES
Barchet-Estefanel, L. A. and Mounié, G., 2004,
Identifying Logical Homogeneous Clusters for
Efficient Wide-area Communications, In Proceedings
of the Euro PVM/MPI, 2004.
Beaumont, O., Boudet, V., Rastello, F. and Robert, Y.,
2001, Matrix Multiplication on Heterogeneous
Platforms, IEEE Transactions on Parallel and
Distributed Systems, 12 (10), 2001.
Blumofe, R. D. and Leiserson, C. E., 1998, Space-
Efficient Scheduling of Multithreaded Computations,
SIAM Journal on Computing, 27(1), 1998.
Bosilca, G., Chen, Z.,
Dongarra, J., Eijkhout, V., Fagg, G.
E., Fuentes, E., Langou, J., Luszczek, P., Pjesivac-
Grbovic, J., Seymour, K., You, H. and Vadhiyar, S. S.,
2005, Self Adapting Numerical Software (SANS)
Effort, IBM Journal of Research and Development,
2005.
Capello, F., Fraigniaud, P., Mans, B. and Rosenberg, A.
L., 2005, An Algorithmic Model for Heterogeneous
Hyper-Clusters: Rationale and Experience,
International Journal of Foundations of Computer
Science 16(2), 195-215, 2005.
Chen, Z., Dongarra, J., Luszczek, P. and Roche, K., 2003,
Self Adapting Software for Numerical Linear Algebra
and Lapack for Clusters, Parallel Computing, 2003.
Daoudi, E. M., Gautier, T., Kerfali, A., Revire, R. and
Roch, J.-L., 2005, Algorithmes parallèles à grain
adaptatif et applications, Techniques et Sciences
Informatiques, Hermès, 2005.
Desprez, F. and Suter, F., 2004, Impact of mixed-
parallelism on parallel implementations of the Strassen
and Winograd matrix multiplication algorithms,
Concurrency and computation : practice and
experience, 16, 2004.
Dutot, P. -F., Mounié, G. and Trystram, D., 2004,
Scheduling Parallel Tasks — Approximation
Algorithms, chapter 26 of the handbook of scheduling,
edited by Joseph Y-T. Leung, 2004.
Eskenazi, E. M., Fioukov, A. V., Hammer, D. K., Obbink,
H. and Pronk, B., 2004, Analysis and Prediction of
Performance for Evolving Architectures, In
Proceedings of the 30
th
EUROMICRO Conference
(EUROMICRO'04), 2004.
Frigo, M. and Johnson, S., 1998, FFTW : an adaptive
software architecture for the Fast Fourier Transform,
In Proceedings of ICASSP, 1998.
Hartmann, O., Kuhnemann, M., Rauber, T. and Runger,
G., 2006, Adaptive Selection of Communication
Methods to Optimize Collective MPI Operations, In
Proceedings of the 12
th
Workshop on Compilers for
Parallel Computers (CPC’06), 2006.
Hong, B. and Prasanna, V. K., 2002, Adaptive Matrix
Multiplication in Heterogeneous Environments, In
Proceedings of the 9
th
International Conference on
Parallel and Distributed Systems (ICPADS'02), 2002.
Hunold, S., Rauber, T. and Runger, G., 2004, Multilevel
Hierarchical Matrix Multiplication on Clusters, In
Proceedings of the 18
th
International Conference on
Supercomputing, 2004.
Lastovetsky, A. and Reddy, R., 2004, On performance
analysis of heterogeneous parallel algorithms, Parallel
Computing, 30, 2004.
Li, J., 1996, A poly-algorithm for parallel dense matrix
multiplication on two dimensional process grid
topologies, PhD Thesis, University of Mississippi,
1996.
Lowekamp, B. B. and Beguelin, A., 1996, ECO: Efficient
Collective Operations for Communication on
Heterogeneous Networks, In Proceedings of the 10
th
International Parallel Processing Symposium, 1996.
McCracken, M. O., Snavely, A. and Malony, A. D., 2003,
Performance Modeling for Dynamic Algorithm
Selection, International Conference on Computational
Science, 2003.
Nasri, W., Trystram, D. and Achour, S., 2006, Adaptive
Algorithms for the Parallelization of the Dense Matrix
Multiplication on Clusters, International Journal of
Computational Science and Engineering, to appear,
2006.
Ngoko, Y., 2005, Poly-algorithmes pour une
programmation efficace des problèmes numériques.
Exemple du produit de matrices, Master Thesis,
University of Yaoundé I, 2005.
Ohtaki, Y., Takahashi, D., Boku, T. and Sato, M., 2004,
Parallel Implementation of Strassen's Matrix
Multiplication Algorithm for Heterogeneous Clusters,
IPDPS'04, 2004.
Roche, K. J. and Dongarra, J. J., 2002, Deploying parallel
numerical library routines to cluster computing in a
self adapting fashion, Parallel Computing, Advances
and Current Issues, 2002.
Thomas, N., Tanase, G., Tkachyshyn, O., Perdue, J.,
Amato, N. M. and Rauchwerger L., 2005, A
Framework for Adaptive Algorithm Selection in
STAPL, In Proceedings of PPoPP’05, 2005.
Whaley, R. C., Petitet, A. and Dongarra, J. J., 2001,
Automated empirical optimizations of software and
the ATLAS project, Parallel Computing, 27, 2001.
Wolski, R., Spring, N. and Peterson, C., 1997,
Implementing a Performance Forecasting System for
Metacomputing : The Network Weather Service, In
Supercomputing, 1997.
ICSOFT 2006 - INTERNATIONAL CONFERENCE ON SOFTWARE AND DATA TECHNOLOGIES
350
