
TOWARDS VISUAL-BANDWIDTH:
GETTING CLOSE TO ONE’S EXPERIMENT DATA
Mark R. Titchener
The University of Auckland
Division of Science and Technology, Tamaki Campus, Morrin Road, Private Bag, Auckland
Keywords:
information visualisation, graphical data interface, data animation.
Abstract:
This paper presents a novel general purpose visualisation environment S
P
O
D
(Space Odyssey), that has
evolved in relation to our research needs involving analysis and measurement of chaos and complexity in
time-series data. More specifically our attention has turned to deriving sleep state information from EEG/EOG.
S
P
O
D
operates largely as an interpreter of formated data files, to display surfaces, static and/or animated line
and point graphs, individually or simultaneously in a virtual 3-D viewing space. It comfortably handles sur-
faces of more than 100,000 vertexes, and combinations of more than 15,000 static and/or animated graphs.
User controls allow dynamic changes to viewing angle, lighting and display parameters. S
P
O
D
is ideally
suited to ‘scoping’ experiment data and results, for visually debugging complex processing algorithms, or
simply providing visual insight into complex data sets.
1 INTRODUCTION
This paper briefly introduces S
P
O
D
(2005: Space
Odyssey), an interactive graphical display tool offer-
ing a combination of features tailored for scoping ex-
periment data. The name is taken from the Kubrick
film (Clarke and Kubrick, 1968), in which animated
graphics featured with appealing simplicity as a back-
drop to many of the scenes.
A plethora of graphics oriented applications al-
ready exist! Why another? Many applications, like
Matlab (Moler, 1980), Mathematica, Maple (Char
et al., 1983), S (Becker and Chambers, 1981), and
more recently R (Ihaka and Gentleman, 1996), com-
bine numerical and programming options with a
broad range of graphical support features. Not all
research projects sit comfortably within these self-
contained computationally oriented environments.
Our own research in sleep related studies has
evolved largely within the context of UNIX. The shell
environment (Kochan and Wood, 1990), with its no-
tion of standard I/O, filters, pipes, and redirection, en-
courages a distinctive mode of work, one that places
a reliance on tools, rather than on applications. An
established range of highly optimised tools are stan-
dardly distributed with UNIX operating systems, and
may be combined within single line instructions to
achieve efficient ‘one-off’ processing operations, or
saved as executable shell script files for later use.
Within this setting, we have developed and refined
C-coded tools for computing complexity and entropy
from symbolic encodings of real-valued time series.
The underlying string parsing operations embody ty-
pographical rather than numerical processing not eas-
ily handled within a mathematically oriented environ-
ment. Combining these with other standard UNIX
tools enables us to compute the bulk of our results.
Our use initial of Matlab was thus limited to periph-
eral computations and graphical display of the re-
sults. With time, this mode of working presented us
with a bottleneck thus motivating the development of
S
P
O
D
.
S
P
O
D
is built around the OpenGL and GLUT li-
braries and operates as a stand alone tool, comple-
menting our existing computational capabilities. It
operates as an interpreter, translating static graphical
prescriptions into 3D visualisation experiences. Its
ability to accept large numbers of simple graphical
objects gives access to visual effects that are geared
to data ’scoping’. Interactive features, enable flexible
animation and manipulation of the objects.
Our early focus was on improving visual-
bandwidth over a narrow range of graphical functions.
However, its capabilities have expanded considerably
378
R. Titchener M. (2006).
TOWARDS VISUAL-BANDWIDTH: GETTING CLOSE TO ONE’S EXPERIMENT DATA.
In Proceedings of the First International Conference on Computer Graphics Theory and Applications, pages 378-383
DOI: 10.5220/0001354003780383
Copyright
c
SciTePress

beyond the initial requirements and is broadly useful
in experimental research settings.
Separation of visualisation issues from the compu-
tational, created initially unforeseen opportunities at
the data interface and invites creative use of the data
structures both for visualisation as well as the subse-
quent data processing steps. Thus S
P
O
D
has con-
siderably changed the way we now undertake our re-
search.
2 SLEEP-STATE RESEARCH
Determining patient sleep-state from recorded poly-
graph time-series data, usually requires a skilled pro-
fessional, trained to recognise the salient features in-
dicative of brain state. The process involves scan-
ning visually through a night’s polygraph recordings
and manually scoring the events. The EEG (electro-
encephalogram) and EOG (electro-oculargram) chan-
nels are of prime interest (Sleigh et al., ) but anywhere
from 16 channels of data are typically recorded from
a patient in a diagnostic session. The recorded data
(sampled time-series) include complex signal behav-
iors recorded from electrodes attached to the scalp.
It is well understood that the EEG and EOG signals
alone are highly indicative of brain sleep-state.
At, 50-100Hz sampling rates, roughly 50
megabytes of data is generated per patient per
night. In a clinic, as many as six patients might be
monitored simultaneously with the accumulated data
amounting to gigabytes per month. While software
applications with pattern recognition capabilities may
be used to facilitate in manual scoring of the traces,
the task remains essentially an operator intensive one.
Archived data is used as our principal resource for
developing and testing new algorithms. In this re-
spect data sets are constantly revisited, reprocessed
and new results evaluated and compared against old
results. Visual-bandwidth is key. The focus of our
work is to develop automated algorithms sensitive to
sleep state, to improve existing treatments for sleep
disorders.
The brain may be viewed as complex non-linear
dynamical system (Schuster and Just, 2005) that ex-
hibits to varying extent, characteristics of determin-
istic chaos. The techniques we exploit to quantify
system state draw from relatively recent results in
non-linear dynamics (Steuer et al., 2001) relating en-
tropy to Lyapunov exponents, and use a computable
T-entropy(Titchener et al., 2005) thus as a measure of
state. Entropy is a measure of chaos, of unpredictabil-
ity or ‘randomness’. By computing the information
rate (T-entropy) from coarse grained encodings of
sampled time-series data one may derive useful infor-
mation about the corresponding sleep processes.
The EEG/EOG time series-data are saved as lists of
space-delimited floating-point values for processing.
The lists are recoded as binary strings through the ap-
plication of a coarse grained bi-partition, or threshold.
By means of ‘scanning’ the threshold across the sig-
nal dynamics, a series of encodings may be generated
that together encapsulate the whole of the signal.
A sliding-window defines a current set of sub-
strings from which T-entropy is compute. The values
computed for each corresponding position of the win-
dow gives rise to a two dimensional array of values
that may be visualised as a surface. The height of the
surface corresponds to the information-rate conveyed
by the time series samples averaged over a duration
corresponding to the window width. For EEG and
EOG signals these surfaces appear much like ‘moun-
tain ranges’. Lighting and surface orientation may
be controlled to help identify salient sleep events (c.f.
Figure 3 ).
The processed data from these channels is sub-
sequently combined and displayed to advantage in
S
P
O
D
, to extract more directly the sleep-state as a
function of time. These techniques are not specific
to this area of research, but may be easily adapted
to areas ranging from seismology to biology, applied
physics, medical diagnostics, as well as in engineer-
ing and industrial process control applications.
3 THE DATA INTERFACE
S
P
O
D
operates as an interpreter, accepting pre-
formated data either as standard input or to be read
from a specified input file, prescribing surfaces, static
or animated graphs and traces, and other positional
markers. For readability, object data is stored as text
arrays or lists of floating format numbers, reflecting
the form of the experiment data itself. Viewing is a
2D projection of a working 3D volume, nominally de-
fined by (±10, ±8,±8) units.
Data headers associated with the data lists prescribe
i) the display mode, ii) array size, and iii) the scal-
ing, and iv) offsets required to place objects within
the viewing space. The data lists are invariably re-
main in the raw unscaled form, useful for subsequent
data processing steps. The scaling and offset calcula-
tions required in displaying the objects occurs as an
overhead at the time objects are loaded into S
P
O
D
’s
memory.
Illuminated scales (similar to an oscilloscope) are
helpful in resolving orientation and visual scaling.
The graphical object prescriptions include tags/labels
that can be used to identify individual objects in,
for example, an animated sequence. Optional qual-
ifiers may be associated with individual objects and
prescriptions, to preset viewing options and display
TOWARDS VISUAL-BANDWIDTH: GETTING CLOSE TO ONE’S EXPERIMENT DATA
379

modes. These may also be controlled interactively
during viewing. Objects including surfaces, static and
animated graphs, and so on, may selected individu-
ally, or in combination for viewing.
The focus of S
P
O
D
has been on providing ‘scop-
ing’ options, to allow one to explore data sets with
ease, to extract or isolate events that can often be fleet-
ing or transitory phenomena.
S
P
O
D
is developed around the OpenGL (Kilgard,
1995) and GLUT (utility toolkit) (Kilgard, 1996) li-
braries. These largely address any portability issues.
S
P
O
D
essentially bridges the gap to take raw data
into the required to exercise the features of OpenGL.
S
P
O
D
’s interface gives the user the freedom to move
around data sets in both space and time. Animation
often plays an important role in discovering important
or interesting effects. Much of its responsiveness de-
rives from the graphics display hardware that is today
ubiquitous across all computing platforms. Real-time
animation of sequences of graphs, with rotation and
rolling of viewing and light source positions enables
one to quickly identify interesting aspects of one’s
data. Even changing the speed of animation can high-
light what might be otherwise invisible dynamical ef-
fects. S
P
O
D
can emulate the oscilloscope function
but instead of being restricted to 2D, and two input
channels, it provides support in effect for an unlim-
ited number of channels and in a 3D environment.
The emphasis is on ‘visual bandwidth’ rather than
‘gloss’. Whereas most graphics oriented applications
dwell on the frills, providing attractive 2D depictions
and 3D projections of charts, graphs, histograms, sur-
faces, replete with numbered / labeled axes, reference
scales and grid, legend and/or other visual clutter,
S
P
O
D
follows the more simple display paradigm of
Space Odyssey.
In a research setting one is generally less con-
cerned with gloss, and more with exposing subtle fea-
tures, trends, patterns, interesting artifacts, and so on.
Turn-around-time from inputing one’s data to visual-
ising it and/or its processed derivatives takes prece-
dence. ‘Visual-bandwidth’ is about giving visual ac-
cess to data, rendering 2 & 3D graphical objects often
in combination, allowing objects to be spun around,
coloured and shaded, or otherwise animated, scanned,
perused, to enable comparisons or reveal subtleties.
In this respect, an interface ought not stand between
the user and his or her data.
3.1 Object File Format
Orientation of the xyz axes in the viewing space fol-
lows a ‘CNC machining’ convention. Thus in the de-
fault position, the x−axis lies across the width of the
screen, the z−axis corresponds to the vertical, and
the y−axis points into the screen. Illuminated z : x
and y : x scales divide the viewing space into quad-
rant volumes and invariably help with identifying the
viewing orientation.
Simplicity is key to the graph prescriptions with
the data presented simply as space delimited arrays of
floating format numbers. Formatted headers prescribe
how the associated data is to be rendered. The first
line of an object prescription has the general form:
object
specifier:[colour]:label. The object specifier
comprises a single letter indicating the display type.
As a rule, lower case specifiers are reserved for sta-
tic objects, and upper case for animated or dynamic
display objects.
• s: surface, rectangular mesh, displacements in z di-
rection
• x: static 3D connected- or point-graph
• y: static 2D connected-or point-graph (parallel to
yx plane)
• z: static 2D connected-or point-graph (parallel to
zx plane)
• k: static 3D connected-or point-graph (parallel to
zx plane)
• X: static or animated 3D connected-graph
• Y: dynamic 2D connected trace or sample point dis-
play (parallel to yx plane)
• Z: dynamic 2D connected trace or sample point dis-
play (parallel to zx plane)
The second character field in a header indicates
graph colour ( r: red, g: green, b: blue, y: yellow, c:
cyan, m: magenta, w: white, <sp>: black). An ex-
tended colour set is accessed by using a further object
qualifier. Such ‘qualifiers’ follow the object prescrip-
tion which it amends or extends.
Each object is labeled. Distinguishing labels pro-
vide convenience both for identifying the individual
graphs in animated sequences, but also when using a
text editor to peruse or make quick changes to object
specifiers. (A text editor also offers a convenient way
to combine, i.e., cut and paste together new combina-
tions of existing objects). In an extended sequence of
animated graphs, label field may include a numbered
index or other visual cues helpful when interpreting
the sequence.
Animated displays are driven by two internal float-
ing point parameters; a counting index g, that runs
over the unit interval, g ∈ [0.0, 1.0], and a display
range index h ∈ [0.00025, 1.0]. Both may be con-
trolled from mouse & keyboard actions, but may be
preset by way of qualifier instructions. Within the
present limits of the viewer, and its relatively sim-
ple underlying object format, there exists consider-
able flexibility for creative display of combined sta-
tic and animated graphical data. These are partially
illustrated in some of the figures that follow.
GRAPP 2006 - COMPUTER GRAPHICS THEORY AND APPLICATIONS
380

3.1.1 Surfaces
Surfaces are limited to regular 2D arrays: z
x,y
=
s(x, y) defines the surface function s. This is suf-
ficient for surface representations for a wide range
of experiment data. A maximum of ten surface pre-
scriptions may be loaded for viewing in a session and
may be selected/deselected for viewing from key ac-
tions. Surfaces comprising up to 200,000 vertices are
comfortably handled but more typically comprise 20–
50,000 points for entropy surface descriptions arising
in our sleep-analysis.
The surface object is indicated by the lower case
specifier, s, followed by colon separator, and label
text. Two integers follow to define the associated data
array size. Six further parameters indicate the x-, y-,
z- floating-point scale-factors and offsets, used to size
and position the surface within the field of view. Then
follows the surface data, an array of m lines each of n
floating point values. Surface data is invariably kept
in its raw form suitable for further processing if re-
quired. The format of the floating format list is not
critical though will typically reflect the array dimen-
sions. Data may be wrapped for improved readability,
for example, in a text editor.
The surface display is modal. Key options chose
between i) the wire geometry tessellated surface, ii)
an opaque surface, with elements coloured as a func-
tion of the surface displacement, or iii) with surface
smoothing (default display mode). The surface colour
gradient, and brightness may be preset as part of the
input file, but also changed interactively at the key-
board. The orientation of the object and light angle
may also be specified as part of the input file. Again
these are controllable from mouse and key combina-
tions. The inclusion of single-line qualifying instruc-
tions in the object data file provide a convenient way
to preset parameters so that a file can be opened to a
preferred view. The current view settings may be out-
put (with std output) to be saved with the object file
to set the new default (opening) view.
3.1.2 Static Graphs
Static connected- or point-graphs may be prescribed
in number of ways. For many situations it is sufficient
to specify graphs “in the plane”, for example, the yx
plane or the zx plane. A y or z object specifier, in-
dicates this accordingly. In either of these graphing
modes, it is sufficient to simply list the data points to
be graphed as a one dimensional array. As with the
surface prescription, the array size parameters appear
in the second line of the header. The array index im-
plicitly defines the x-coordinates. The graph width
is scaled to fit the viewing dimensions specified as
part of the six x-,y-,z- range and offset parameters.
Offsets are used to arrange visual separation between
multiple graphs within the 3D display volume.
Static 3D ’trajectories’, with the x co-ordinate rep-
resenting the time scale for example and y and z
values plotted as a function of array index x, use
the k (‘kurve’) specifier. The ‘kurve’ option allows
for a trajectory to be partitioned interactively and
colour coded according to the segmented regions. The
coloured trajectory may be output (std output) as a
numerically scored graphical object prescription (The
output of S
P
O
D
can in principle be piped to itself to
create a new instance of the display). These rather
specific features, used extensively in our work on
sleep studies, have also been found to be more broadly
applicable, in other engineering related analysis. Al-
ternatively, to plot free-form 3D graphs or points se-
ries, [x
i
], [y
i
], [z
i
], the x specifier is used.
The aforementioned header format is adhered to
across all of the display options. It includes the array
dimensions, as well as the x-,y-,z- range and offsets
respectively. Since static objects are scaled irrespec-
tive of the array size, to ‘fill’ the dimensions indicated
by the ‘scale’ parameters, separate data series may be
compared on the same time scale, irrespective of the
numbers of points in the respective series. This is es-
pecially convenient when looking at multiple data se-
ries generated perhaps using unrelated sampling rates,
but sharing a common time scale.
As mentioned S
P
O
D
currently accepts up to
16,000 static free-form connected graphs in any given
session. There is no reason to see this as hard limit,
but as this number is more than sufficient for our cur-
rent requirements we have not felt the need to go fur-
ther. It would be unusual to wish to display simulta-
neously this number of graphs anyway. More usually
such a set of graphs would be ‘played’ as an animated
sequence to enable convenient observation of dynam-
ical events in the data sets. See Figure 1 as discussed
below.
3.1.3 Dynamic Graphs and Animated Sequences
Dynamic “oscillograph” displays, animated displays
of time-series data and graph sequences, are indi-
cated with upper case object specifiers, X, Y and Z.As
with the y, z specifiers, traces are implicitly graphed
against a time scale (the x-axis), in the yx and zx
planes, respectively. Data arrays may include up-
wards of a million data points. An internal counting
index operates as a pointer into the data array, and a
range-index defines a ‘viewing window size’ on the
trace being displayed. The windowed portion of the
trace is further scaled and offset for display purposes,
in accordance with the header, range and offset para-
meters.
Traces may be displayed statically, or dynamically
at rates considerably in excess of 10,000 points per
second (very much faster than the eye can follow!).
TOWARDS VISUAL-BANDWIDTH: GETTING CLOSE TO ONE’S EXPERIMENT DATA
381
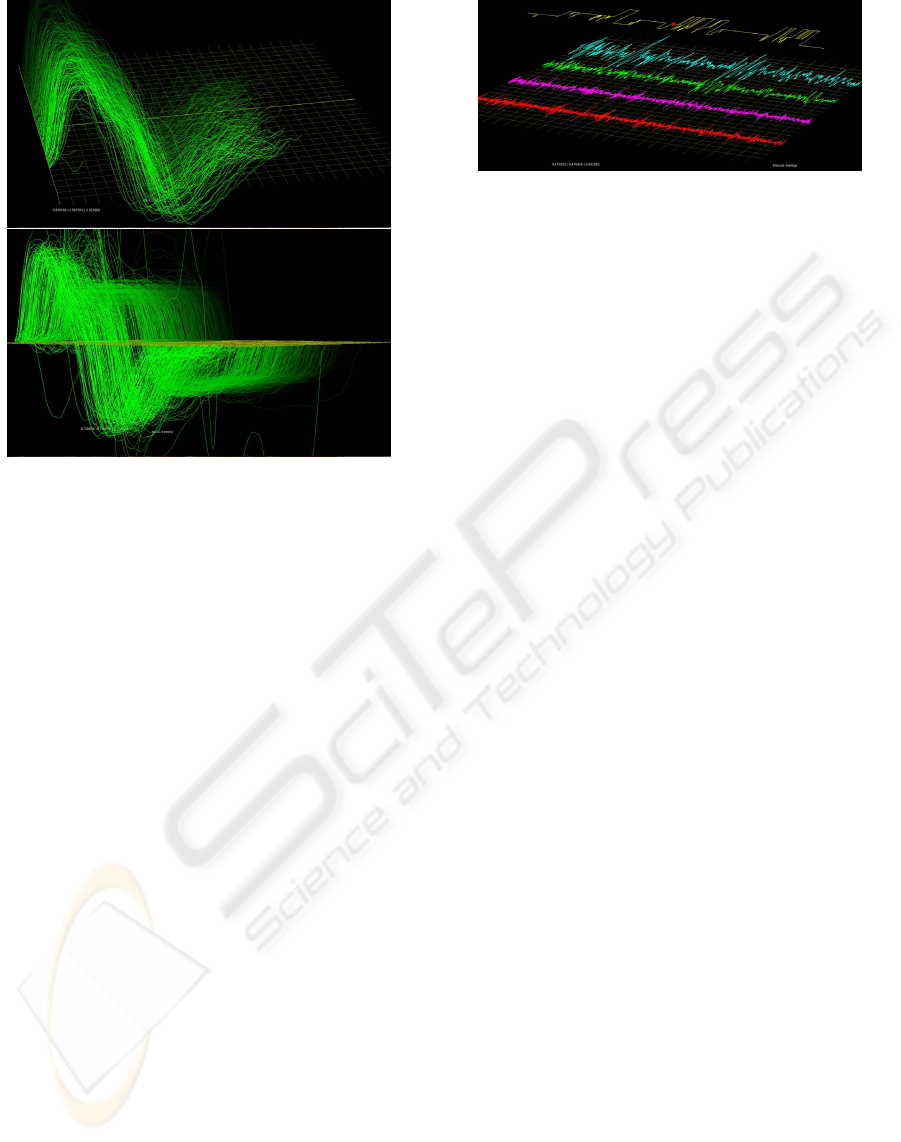
Figure 1: An animated sequence may be replayed with in-
dividual graphs separated in space to give the appearance of
‘depth’, or alternatively as a planar ‘cascade’. The bright-
ness of the graphs is modulated to add to the perception
of depth. Rotation and lighting effects allow one to move
around the objects dynamically to give advantageous views
of changing effects.
Traces may also be manually scrolled across the view-
ing space using mouse and key actions.
A contrasting animation effect is possible using
the X object specifier. As with the free from graphs
(using the x specifier) objects comprise an array of
[x
i
], [y
i
], [z
i
] co-ordinate values, scaled and offset in
accordance with the header parameters. These objects
default to being simultaneously visible unless a fur-
ther instruction is included with the session. Alterna-
tively such a sequence of graphs may be played in an
animated sequence. An internal index counter deter-
mines the point in the graph sequence to be displayed,
and an index-range parameter determines how many
such graphs in the immediate vicinity of the current
position pointer are displayed simultaneously.
Sequence replay is modal. Figure 1 shows a snap-
shot from a series of 7000 graphs, with two different
views. In this viewing mode the graphs are placed in
sequence along the y-axis to create a sense of depth
that assists in visual interpretation of the data.
3.1.4 Mixing it all up
An important feature of S
P
O
D
is its ability to simul-
taneously handle a mix of object types. Surfaces, sta-
tic and animated graphs and curves may be combined
to reveal relationships within a set of complex signals,
and respective representations of these signals.
Figure 2: ‘Snapshot’ of animated polygraph data together
with a static graph of the full night’s sleep states (yellow,
offset above the polygraph traces). Planar static graphs and
animated traces, may be rotated and spun in the viewing
space, give useful perspective on the data traces.
Figure 3 shows an example of graphical objects de-
rived in relation to sleep analysis. The display corre-
sponds to the complete night’s data for one patient.
The entropy surface computed from the EEG/C3
channel, encapsulates all of the sleep state activity for
the night. The entropy surface cross-section at any
given point in time (represented by x-axis) is a rela-
tively precise, if not however convolved, measure of
signal source statistics over the corresponding sam-
ple periods. The peak values for the entropy, de-
fined by the surface ridge (and graphed in red directly
above the ridge in the z-x plane), is graphed together
with the maximum entropy values for the EOC/LOC
(green). The latter is reflected in to the yx plane.
Plotting the maximum entropy values for C3 and
LOC against each results in the 3D trajectory (multi-
coloured). This trajectory is partitioned using planar
thresholds to divide the space into non-overlapping
volumes, and colour-coded accordingly; blue : awake
, red : REM sleep, green : S1, an NREM sleep state,
yellow : S2,S3,S4 NREM sleep states. S
P
O
D
then
encodes these coloured coded segments into numeri-
cally labeled states, displayed as the graph in yellow
below the surface.
4 CONCLUDING REMARKS
S
P
O
D
offers a novel approach to data visualisation.
As a interactive graphing and plotting tool, it accepts
data either as standard input or from appropriately for-
mated text files.
Graphical objects supported by the viewer include
surface arrays, static- and dynamic graphs of vari-
ous kinds, positional markers and combinations of
these. As many as 16,000 objects currently may
be simultaneously loaded for viewing. Surfaces are
limited to 2D regular array of floating point values
z
x,y
= s(x, y). Graphs in the zx or yx plane are pre-
scribed as lists of floating point values z
x
= f (x),
and y
x
= g(x), respectively. Trajectories may be pre-
scribed either by a 2D array, listing points y
x
==
GRAPP 2006 - COMPUTER GRAPHICS THEORY AND APPLICATIONS
382

Figure 3: The above includes static graphs of the entropy of
the EEG (red) and EOG (2 of green) channels. A 3D tra-
jectory is generated (above left) by plotting EEG and EOG
entropy series against one another. The trajectory is then
further partitioned by way of ‘invisible’ intersecting planes
and colour coded in respect of the volume associated sleep
states. The largely obscured graph (yellow) is generated as
a numerical encoding of the resultant states, and issues from
S
P
O
D
as standard output.
f(x) and z
x
== g(x) or independently of x, by list-
ing as a 3D array the coordinate points (x = f(i); y =
g(i); z = h(i), i =1, 2, 3 ...). Graphs are displayed
either as static or dynamic objects.
While many of the possible display modes have
been outlined here, it is not easy to convey in words
the full power of the dynamic and interactive as-
pects of the environment. The viewing experience,
as with other 3D graphical environments, is hugely
compelling in of itself, and S
P
O
D
is currently find-
ing application in other research areas, outside of the
sleep studies.
Rather than being just another graphing tool, its
convenience and power to flexibly present complex
data, combinations of static and animated graphs,
makes S
P
O
D
equally useful in technical presentation
settings. Though S
P
O
D
has stabilised considerably
since its inception, new features are being added at a
steady pace, in response to new visualisation require-
ments, thus augmenting its already considerable ver-
satility.
ACKNOWLEDGMENT
The author wishes to acknowledge that this research
work has been carried out with support from Fisher
and Paykel Healthcare (NZ) Ltd.
REFERENCES
Becker, R. A. and Chambers, J. M. (1981). S: A Language
and System for Data Analysis. AT&T Bell Laborato-
ries, Murray Hill, NJ, USA.
Char, B., Geddes, K., and Gonnet, G. (1983). The Maple
symbolic computation system. 17(3–4):31–42.
Clarke, A. and Kubrick, S. (1968). 2001: A Space Odyssey.
MGM, Polaris productions.
Ihaka, R. and Gentleman, R. (1996). R: A language for data
analysis and graphics. Journal of Computational and
Graphical Statistics, 5(3):299–314.
Kilgard, M. (1995). OpenGL: Let there be light! The X
Journal: Computing Technology with the X Window
System, 4(3):12.
Kilgard, M. J. (1996). OpenGL: Free OpenGL software.
The X Journal: Computing Technology with the X
Window System, 5(5):74.
Kochan, S. and Wood, P. (1990). UNIX Shell Programming.
pub-HAYDEN, revised edition.
Moler, C. B. (1980). MATLAB user’s guide. Technical re-
port, University of New Mexico. Dept. of Computer
Science. Describes use of Classic Matlab, the proto-
type for the expanded professional Matlab from The
MathWorks.
Schuster, H. and Just, W. (2005). Deterministic Chaos, an
introduction. Wiley-VCH, Berlin, revised edition.
Sleigh, J. W., Steyn-Ross, D. A., Steyn-Ross, M. L.,
Grant, C., and Ludbrook, G. (2004). Cortical entropy
changes with general anaesthesia: theory and experi-
ment. Physiological Measurement, 25, pp 921–934.
Steuer, R., Ebeling, W. B., and Titchener, M. R. (2001). Par-
tition based entropies. In Stochastics and Dynamics,
pp 45–61. World scientific.
Titchener, M. R., Gulliver, A., Nicolescu, R., Speidel, U.,
and Staiger, L. (2005). Deterministic information the-
ory. Fundamenta Informaticae, 64(1–4):443–461.
TOWARDS VISUAL-BANDWIDTH: GETTING CLOSE TO ONE’S EXPERIMENT DATA
383
