
AN INTERACTIVE METHOD FOR REFRACTIVE WATER
CAUSTICS RENDERING USING COLOR AND DEPTH
TEXTURES
Nuttachai Tipprasert
Department of Computer Engineering,Faculty of Engineering,Chulalongkorn University 254 Phyathai Road, Patumwan,
Bangkok Thailand. 10330
Pizzanu Kanongchaiyos
Department of Computer Engineering,Faculty of Engineering,Chulalongkorn University 254 Phyathai Road, Patumwan,
Bangkok Thailand. 10330
Keywords: global illumination, caustics, natural phenomena, color texture, depth texture, interactive rendering.
Abstract: Realistic rendering of underwater scenes is one of the most anticipated research topics in computer graphics.
Caustics are the important component enhancing the realism of this kind of scenes. Unfortunately, rendering
caustics is a time consuming task. As a result, most existing algorithms cannot handle this at interactive rate.
In recent years, volumetric texture based rendering algorithms have been proposed. They can render the
underwater scene with caustics in real-time. However, these algorithms require large amount of memory
and are restricted to non-complex scene. In this paper we present a new interactive caustics rendering
algorithm which require less memory usage. In our proposed method, we represent each object as a pair of
color and depth texture. Color texture is used to store the object image viewed from viewing rays which
refracted at water surface. We calculate the light intensity distribution on this image and store the result
back to the color texture. The depth texture is used in the intensity calculation process to improve accuracy
of the caustics patterns. Our experiment shows that proposed algorithm can handle complex underwater
scene with caustics at interactive time rate. While using a pair of color and depth in stead of volumetric
texture, we can reduce memory usage significantly.
1 INTRODUCTION
Research in the filed of realistic natural phenomena
rendering is one of the most important subjects in
computer graphics. Of all research topics, the
realistic rendering of scene with water is one of the
most anticipates research topics in this filed. To
enhance the realism of this kind of scene, caustics
rendering is one of the most important aspect that
must be taken into account. But the rendering
process of this phenomenon involves many path
tracings and intersection tests. As a result, the
rendering of a realistic water scene seems to be more
suitable for off-line rendering rather than real-time
rendering. However, there are many applications,
such as video games and virtual realities which
require realistic real-time rendering of such a scene.
Therefore, the traditional rendering algorithm cannot
be employed at these applications.
To reduce the computation cost, the volumetric
texture based caustics rendering algorithm has been
proposed (Iwasaki, 2003, Iwasaki, 2005). This
technique use volumetric textures to represent the
objects in the scene and perform the intersection test
on these textures instead. Even though the algorithm
can achieve interactive rendering capability, it
requires a lot of memory. As a consequence, these
techniques are limited to a simple scene that doesnot
have many objects.
Due to this limitation, we introduce a new
interactive method for rendering underwater scene
with caustics as viewed from above water. Our
technique requires less memory usage. In our
proposed method, the objects are represented by one
pair of color and depth texture .These textures are
used in both caustics casting and refracted objects
rendering processes to enhance the performance.
Color texture is used to store the object image
423
Tipprasert N. and Kanongchaiyos P. (2006).
AN INTERACTIVE METHOD FOR REFRACTIVE WATER CAUSTICS RENDERING USING COLOR AND DEPTH TEXTURES.
In Proceedings of the First International Conference on Computer Graphics Theory and Applications, pages 423-428
DOI: 10.5220/0001355404230428
Copyright
c
SciTePress

viewed from viewing rays which refracted at water
surface. The depth texture is used to represent 3D
position of each pixel in color texture. The algorithm
is accelerated by performing intersection and
computing intensity distribution on texture-space in
stead of object-space. We are able to show that this
technique can generate complex underwater scene
with caustics at interactive time-rate.
The remainder of this paper is organized as
follows: Next section, we will briefly discuss the
related work. In section 3, a main concept of our
rendering strategy will be presented. Section 4 our
sample results are shown and then we gave the
conclusion and future work in section 5.
2 RELATED WORK
In the past few decades, many algorithms have been
developed to simulate global illumination effects
such as caustics. (Arvo, 1986; Jensen, 1996;
Guenther, 2004; Trendall, 2000; Wald, 2002;
Wyman, 2004) Even though these techniques can
render realistic caustics, they require long
computational time or require special hardware
setting. Recently, Shah et al. (Shah, 2005) presented
real-time caustics rendering algorithm based on
backward ray-tracing. In order to speed up the
algorithm, they created position texture and used it
to store 3D world coordinate of each object in the
scene, then, perform the intersection tests in the
image-space. The caustics pattern is rendered by
using point primitive. Though, the main concept of
their algorithm similar to our work, the whole idea
has so many differences in details. Besides, their
algorithm suffers from alias problem, just like any
other image-space algorithms.
There are several methods that developed for
underwater caustics rendering. Stam (Stam, 1996)
simulated underwater caustics by generating caustics
textures and mapping them onto objects in the scene,
Crespo (Crespo, 2004) has proposed a method that
was extended from this concept and implemented it
on programmable graphics hardware, although these
methods can simulate underwater caustics in real-
time, the results are not visually correct due to the
fact that they perform light intensity distribution
calculation on flat surface. Watt (Watt, 1990)
introduced underwater caustics rendering algorithm
using backward beam-tracing, which was extended
from the algorithm originally proposed by Heckbert
(Heckbert, 1984). Rather than tracing individual
light rays, the backward beam-tracing traces light
beam that emerge from light source and then refracts
them at each polygons of water mesh. The caustics
patterns are generated by accumulated light intensity
that each receiver polygons receives from each
participated light beam. Though the beautiful images
of underwater scene can be generated from this
algorithm, the computation time is also extremely
long. The main problem about beam-tracing based
caustics rendering algorithm is the intersection test
between light beam and diffuse receiver. Nishita and
Nakamae (Nishita, 1994) solved this problem by
subdividing light beam and using scan-line
algorithm to determine intersection point. Their
algorithm was then improved by Iwasaki et al.
(Iwasaki, 2002). In the following works, Iwasaki et
al. applied volume rendering technique to handle the
case where the observers are above the water
(Iwasaki, 2003). Their proposed method creates slice
image of each receiver object in which the caustics
pattern that cast on these objects can be depicted by
performing the intersection test of light beam on
these images. They continue working on this method
by presenting the extended algorithm for casting
caustics from arbitrary refractive medium (Iwasaki,
2005). By performing intersection test on the
collection of slice images instead of object mesh, the
computation time is greatly reduced. However, these
algorithms require large amount of texture
memories; as a consequence, they are not suitable
for using with complex scene.
To address this problem, our algorithm replaces
the usage of volumetric texture by using a pair of
color and depth texture. Our algorithm can display
refractive caustics due to water surface at interactive
frame-rate and requires much less memory usage
than the previously proposed beam-tracing based
interactive caustics rendering techniques.
3 RENDERING ALGORITHM
In this section we give a description of our new
algorithm. First we present the general idea of fast
intersection test by using a combination of depth
texture and reference planes (3.1). Next, we describe
how to render underwater scene with caustics. In this
step, the color texture then comes into play (3.2).
Finally, the discussion on rendering refracted
underwater scene is given (3.3).
GRAPP 2006 - COMPUTER GRAPHICS THEORY AND APPLICATIONS
424

3.1 General Idea of Fast Intersection
Test Technique
In order to optimize the rendering speed of caustics
rendering algorithm, the method for testing
intersection between light beam and objects must be
improved. Iwasaki et al. (Iwasaki, 2003) solved this
problem by using volumetric textures. In their
proposed method, the volumetric textures are created
by projecting a part of objects images that lie
between two adjacent virtual planes onto one of
these planes. They referred to these virtual planes as
“Sampling Plane”. The sampling plane is used in the
intersection test step to determine the intersection
point of light beam and viewing ray at receiver
geometry. Because the number of sampling plane for
each objects are much less than the number of
polygons, the iteration steps required for finding
intersection point are extremely reduced.
Nevertheless, this algorithm still has a memory
usage problem because large amount of texture
memory is required to store these images. We
observed that if we line up these images in the
correct order from back to front and look straight
through them, these images will appear as one
complete image. From this observation, we realize
that only one color texture is sufficient to represent a
diffuse object. However, the use of single 2D image
to represents 3D object data cannot conserve
volumetric property of the object. If we estimate
intersection point by testing intersection on this
image, the result may be undesirable. The ray may
“early hit” the image plane or “lately miss” the
actual intersection point (see figure 1). We solve the
problem mention above via the use of depth texture
and Reference Planes. In the proposed method, the
depth texture is used to store 3D position of each
pixel of object geometry and the reference planes is
the plane which virtually slices along some given
major axe of object.
In the intersection test step, we use these
reference planes for indexing texture value. When a
ray intersects with the reference plane, the
intersection point (x, y, z) is then transform into
texture space coordinate (x’, y’, z’). The x’ - and y’ -
coordinate are used to index appropriate entry of the
depth texture and the resultant value is compared
against value of z’. If the differences of this two
values are less than some specific threshold, this
intersection point is then accepted (see figure 4).
Normally, this acceptance threshold should be the
distance between two reference planes. Otherwise,
some undesirable result might occur.
From this proposed algorithm, the intersection
test can be done at interactive time-rate and does not
require extra memory usage as it did in the previous
method. In the upcoming sections, we will show
how this technique can be used in underwater
caustics rendering process.
3.2 Rendering Caustics
The caustics pattern are formed by multiple refracted
light rays converge to single point on diffuse object
geometry. In our proposed algorithm, we emulate
this behavior by representing water surface as
triangular mesh. When the incident light rays
intersect with each water triangle, they create
refracted light beam called illumination volume.
Next, we find intersection area of each illumination
volume and object geometry and compute light
intensity for each of them. The intensity of
intersection area can be computed from radiant
equation:
I
c
= Φ
t
/ (A
d
* cos(θ
t
)) (1)
where Φ
t
is the total flux that arriving
intersection area A
d
and θ
t
is the angle between the
refracted light ray and the normal of intersection
area. The value of Φ
t
in equation (1) can be
obtained by finding total flux Φ
i
that pass through
Figure 2: Diagram of our intersection test algorithm. The
opaque line represent reference planes, dash line represent
acceptance range of each reference plane and gray curve
represent object surface. From this image, the intersection
point that will be accepted is the second point.
Figure 1: Incorrect intersection estimation. (a) The
incoming ray hit image plane early. Figure (b) show the
case where the ray is misses the actual intersection point.
AN INTERACTIVE METHOD FOR REFRACTIVE WATER CAUSTICS RENDERING USING COLOR AND DEPTH
TEXTURES
425

water triangle. When light travels through water,
some of its energy are absorbed. Thus, the
relationship between Φ
t
and Φ
i
can be written as:
Φ
t
= Φ
i
* exp(-K*d) (2)
where K is the absorption coefficient and d is the
distant light travels through the water. Let I
i
be
incident light intensity. By substituting equation (1)
with equation (2) and representing Φ
i
in term of I
i
,
we get:
I
c
= I
i
* ((A
w
* cos(θ
i
) / (A
d
* cos(θ
t
)) * exp(-K*d)
(3)
where A
w
is an area of water triangle and θ
i
is an
incident light angle. By accumulating the intensity
of each participated intersection area, caustics
pattern can be depicted. Finally, the final color of
each pixel on diffuse receiver is computed from this
equation:
I
o
= I
c
* I
d
+ I
a
(4)
where I
o
is the final color of the object I
d
is
diffuse light intensity and I
a
is ambient light
intensity.
In order to cast caustics pattern onto receiver
geometry by the method mentioned above, the
intersection test problem must be addressed. We use
the fast intersection test strategy described in the
previous section to handle the case. To find the
intersection area, we first create depth texture and
reference planes. In the process of depth texture and
reference planes creation, we first specify the
bounding box of an object. This bounding box is
also used to define orthogonal view-volume which
will be used in the next step. We must align this
bounding box by setting the front side of the box
perpendicular to the refracted viewing ray (see
figure 3). Then we create depth textures by
rendering diffuse object using orthographic
projection. We only store the position of each vertex
and copy them to the depth texture. The reference
planes are determined by slicing the bounding box
along the refracted viewing ray. The number of
sliced planes is specified by user.
After the depth texture and reference planes are
created, we move to the next step; caustics
rendering. In our proposed method, we first create
diffuse image of the receiver by taking the refracted
viewing ray into account as in the case of depth
texture. We call this image a Diffuse Map and store
it into color texture. Next, we find the intersection
area between each illumination volume and each
reference plane. We then draw intersection triangle
of each area to a color texture called Caustics Map
by using additive blending function. The color of
each triangle vertex is determined by calculating
intensity at the intersection point. After the
intersection triangle is rasterized, we transform each
of their pixels into the depth texture space. The
transformed coordinate of this pixel will be used to
index the value of depth texture. This indexed value
is then compared with pixel’s transformed z
coordinate. If the differences of these two values are
less than specific threshold, we accept this pixel;
otherwise, we discard it. After we finish with
caustics map creation, we then multiply it with
diffuse map to obtain final result. This result is then
stored back to the diffuse map. The overall processes
of caustics rendering are visualized in the figure 4.
By using this proposed method the image of
underwater caustics can be generated at interactive
time-rate. In order to create complete underwater
scene as viewed from the above water, there is one
problem unsolved, that is, refracted underwater
image rendering. Unfortunately, current real-time
refracted image rendering method such as
environment mapping cannot be applied to our
algorithm. This limitation comes from the fact that
our algorithm create object image by using
orthographic projection. If we directly apply these
images to water vertex as environment textures, the
resulting image may be undesirable. Therefore, new
techniques for handling refracted image of
underwater scene created by our algorithm must be
proposed. This technique will be described in details
in the upcoming subsection.
Figure 3: Reference plane alignment.
GRAPP 2006 - COMPUTER GRAPHICS THEORY AND APPLICATIONS
426
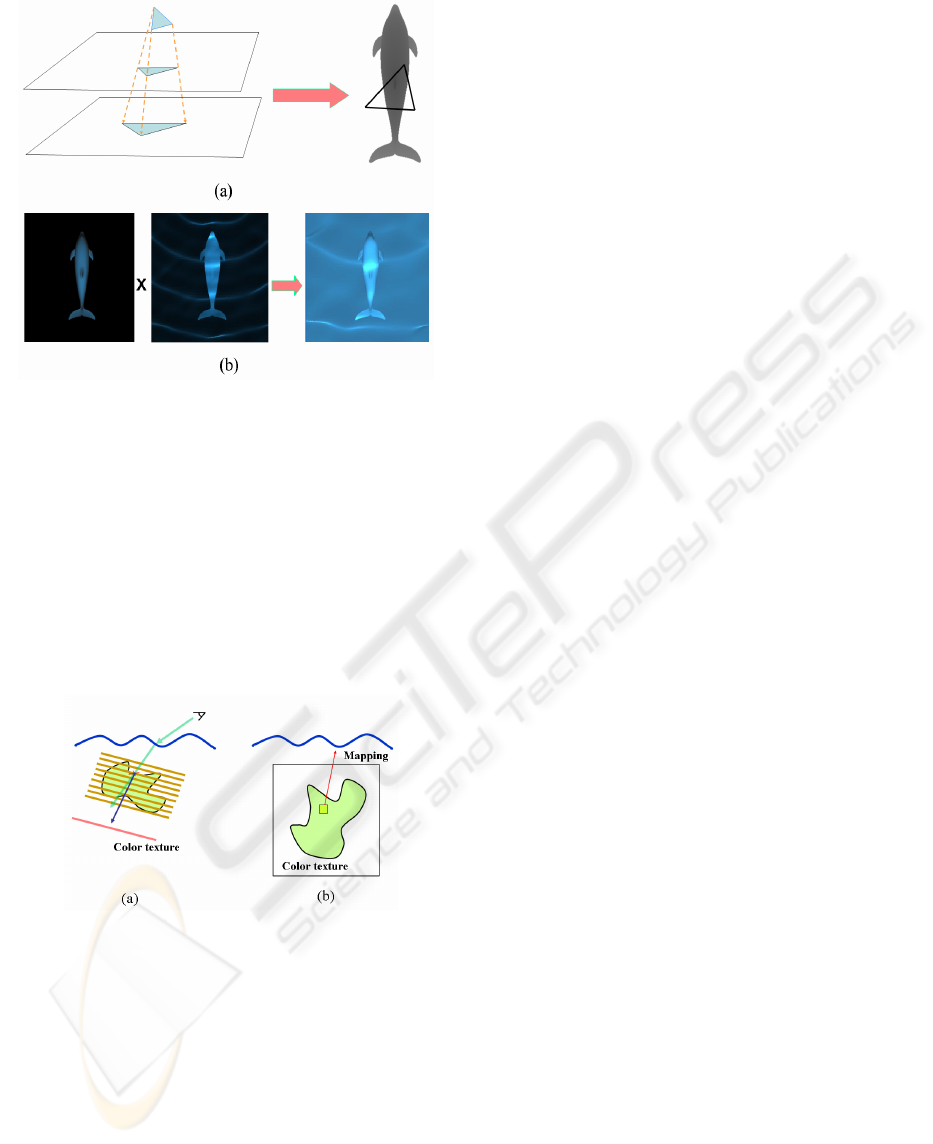
3.3 Rendering Underwater Image as
Viewed from Above Water
In this section, we describe the method for rendering
complete underwater scene with caustics as viewed
from above water.
In order to render the refracted image of under
water objects, our method applies the concept of ray-
tracing and texture mapping (see figure 5). The
proposed method begins by calculating the viewing
vectors from view point to each fragment of water
triangle. Next, we generate refracted viewing ray at
the water surface. After that, the viewing ray is
traced and checked for the intersection point. The
intersection test is performed by using our proposed
reference plane and depth texture strategy. The final
color of water fragment is specified by transforming
the intersection point to texture space and obtaining
color from diffuse map.
4 IMPLEMENTATION AND
RESULTS
There are so many fragment operations involved in
our algorithm; as a result, it cannot be applied to the
fixed function operation on traditional graphics
hardware. By taking an advantage of
programmability on this day GPU, we can perform
caustics rendering using our algorithm at interactive
time-frame. We test our idea by implementing our
proposed algorithm on 2.8 GHz Pentuim IV desktop
with Geforce 6800 128 Mb GPU. The test programs
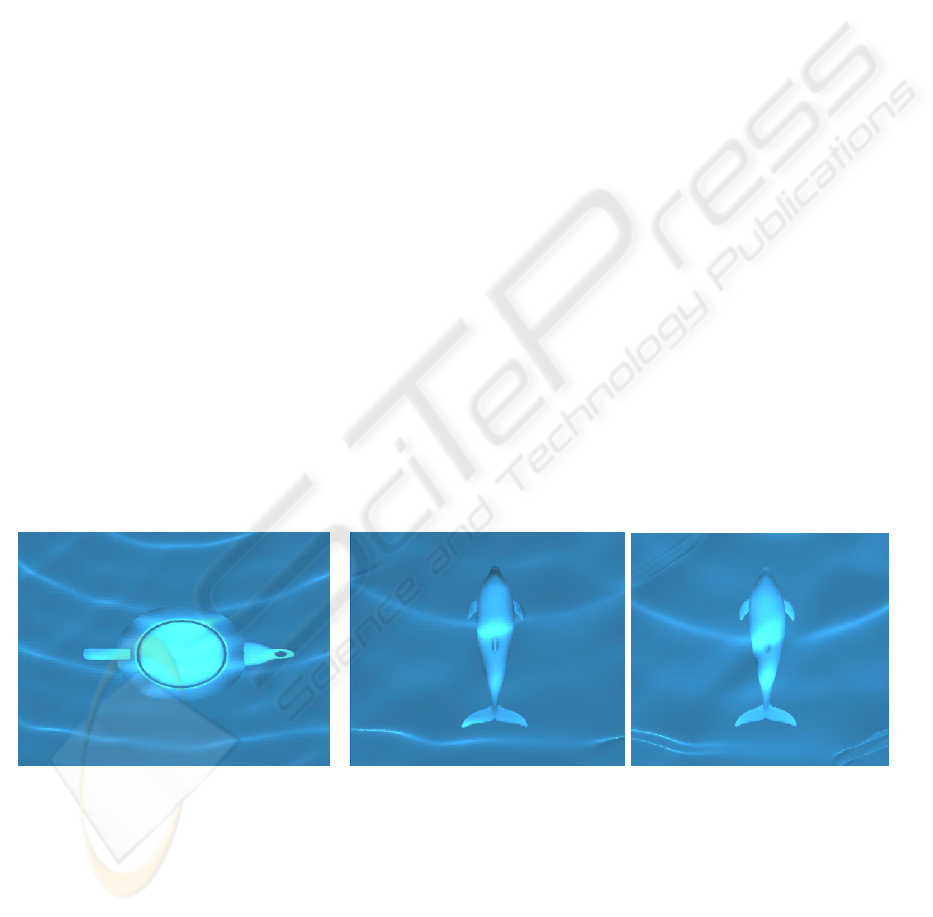
are written in C++ using OpenGL API. Figure 6
show the image of underwater teapot and dolphin.
All images are rendered at resolution of 512 x 512
pixels. Average rendering time of our program is
about 2.2 fps depend on number of reference plane.
The sample images indicated that our algorithm
can cast caustics on arbitrary objects. Two images
on figure 6(b) are rendered by using different
number of reference plane. Although the reference
plane of these two images is 10 times differing, the
differences on the resulting image are hardly
noticeable. It can be concluded that, in some objects
small, number of reference plane are sufficient to
create realistic result.
All sample programs can run in interactive time-
rate. Although in this version of our program, we
have not yet shown dynamic scene, such a case
would not be prone to any problem from our
algorithm, because in this version both color and
depth textures are recreated at each frame.
By comparing with previously proposed
volumetric texture based method (Iwasaki, 2003;
Iwasaki, 2005), the recreation of volumetric texture
can cause a problem. And by using only single pair
of color and depth texture to represent an object, the
required memory usage from the previously
proposed method can be reduced significantly. As a
result, our algorithm is not restricted to a simple
scene.
5 CONCLUSION AND FUTURE
WORK
We have presented a new method for interactive
rendering underwater scene with caustics. With our
proposed method, the problem of complex scene in
previous method (Iwasaki, 2003) has been solved.
The main limitation of our algorithm is it can
only handle refractive caustics and underwater
images. Thus, it cannot be used to generate complete
Fi
g
ure 5: Refraction ma
pp
in
g
techni
q
ue.
Figure 4: Caustics rendering process. In figure (a), the
triangle represents intersection area for each reference
plane. Only accepted fragments of each intersection
triangle are drawn to the caustics map. In figure (b), the
final image is computed by multiplying diffuse map and
caustics ma
p
.
AN INTERACTIVE METHOD FOR REFRACTIVE WATER CAUSTICS RENDERING USING COLOR AND DEPTH
TEXTURES
427
water-side scene. In order to create realistic water-
side scene, the reflective caustics due to water
surface and reflective image of objects must be
taken into consideration. The casting process of
reflective caustics is somewhat different from
refractive caustics, thus, this algorithm must be
extended in order to handle such an effect in future
work. Furthermore, we want to find the optimization
method for this proposed algorithm. From our
observation, the LOD method may be used to apply
with our reference plane algorithm by using less
slice plane at the distance object. The work on
applying this concept is still in development.
REFERENCES
Arvo, J. (1986) Backwards Ray Tracing. SIGGRAPH' 86
Course Note, 12, 259-263.
Crespo, D. S., & Guardado, J. (2004) Rendering water
caustics, Addison Wesley.
Guenther, J., Wald, I., & Slusallek, P. (2004) Realtime
caustics using distributed photon mapping.
Eurographics Workshop on Rendering
Heckbert, P. S., & Hanrahan, P. (1984) Beam tracing
polygonal objects. SIGGRAPH' 84. ACM Press.
Heidrich, W., & Seidel, H. (1998) View-independent
environment maps. Graphics Hardware.
Iwasaki, K., Dobashi, Y., & Nishita, T. (2002) An
efficient method for rendering underwater optical
effects using graphics hardware. Computer Graphics
Forum, 21, 701-711.
Iwasaki, K., Dobashi, Y., & Nishita, T. (2003) A fast
rendering method for refractive and reflective caustics
due to water surfaces. Computer Graphics Forum, 22,
601-609.
Iwasaki, K., Yoshimoto, F., Dobashi, Y., & Nishita, T.
(2005) A Method for Fast Rendering of Caustics from
Refraction by Transparent Objects. IEICE
Transaction,E88-D: Special Issue on CyberWorlds, 5,
904-911.
Jensen, H. W. (1996a) Global illumination using photon
maps. Rendering Techniques' 96. Springer-
Verlag/Wien.
Jensen, H. W. (1996b) Rendering caustics on non-
lambertian surfaces. Graphics Interface' 96
Nishita, T., & Nakamae, E. (1994) Method of displaying
optical effects within water using accumulation-buffer.
SIGGRAPH' 94. ACM Press.
Shah, M. A., & Pattanaik, S. (2005) Caustics Mapping: An
Image-space Technique for Real-time Caustics.
Stam, J. (1996) Random caustics: natural, textures and
wave theory revisited. SIGGPRAPH' 96. ACM Press.
Trendall, C., & Stewart, A.J. (2000) General calculation
using graphics hardware, with application to
interactive caustics. Eurographics Workshop on
Rendering.
Wald, I., Kollig, T., Benthin, C., Keller, A., & Slusallek P.
(2002) Interactive Global illumination using fast ray
tracing. Eurographics Workshop on Rendering
Watt, M. (1990) Light-water interaction using backward
beam tracing. SIGGRAPH' 90. ACM Press.
Wyman, C. (2005) An approximate image-space approach
for interactive refraction. SIGGRAPH 2005. ACM
Press.
Wyman, C., Hansen, C. D., & Shirley, P. (2004)
Interactive caustics using local precomputed
irradiance. Pacific Conference on Computer Graphics
and Applications.
Figure 6: Results from our algorithm. Figure (a) show under water teapot. Figure (b) compare two dolphin images which
rendered by using different number of reference plane. Image on the left was rendered at average 2.2 fps with 50
reference planes. Image on the right was rendered at average 10.7 fps with 5 reference planes.
(a)
(b)
GRAPP 2006 - COMPUTER GRAPHICS THEORY AND APPLICATIONS
428
