AUTOMATIC EXTRACTION OF CLOSED CONTOURS IN THE
PORTUGUESE CADASTRAL MAPS
Tiago Candeias, Filipe Tomaz, Hamid Shahbazkia
Universidade do Algarve, Computer Science Laboratory
Campus de Gambelas, 8000-117 Faro, Portugal
Keywords:
Contour Extraction, Image Recognition, Document Image Analysis.
Abstract:
The automatic extraction of closed contours is the most important and difficult problem in the automatic recog-
nition of the Portuguese cadastral maps. Many difficulties such as gaps on contour, elements connected on
contour, crossing of lines and the association of each entity to its contour have to be solved. In literature there
are very few studies about the recognition of cadastral maps and the maps already studied are different than
ours. Therefore our research mainly focused on appropriate computer vision algorithms that yield acceptable
results.
In this paper we present a sequence of algorithms to solve various problems in the contour extraction. The
algorithms are completely different and each one tries to solve one specific problem of the analysis. The
methods used were the Block-Fill algorithm, the Lohmann’s algorithm, the Seed-Segment algorithm and the
Rosin-West’s vectorization algorithm.
The architecture of our system is presented and the results are shown at the end of the paper.
1 INTRODUCTION
The automatic digitalisation of the Portuguese cadas-
tral maps has many problems and difficulties that rep-
resent interesting challenges in the image recognition
field. One of those problems and certainly the most
difficult is the automatic extraction of the closed con-
tours. These difficulties are due to the quality of im-
ages to recognise and the way the maps were drew.
These cadastral maps are composed by many dif-
ferent patterns such as crosses, circles, arcs, dashed
lines, solid lines and characters. Each pattern has
a semantic, for instance a circle represents a cadas-
tral entity, which is inside of a closed solid line that
represent the parcel’s contour and defines the con-
tour perimeter. Perhaps a parcel has inside some
dashed lines and some characters that represent the
sub-parcel’s contour and the sub-parcel’s type or sub-
parcel’s number.
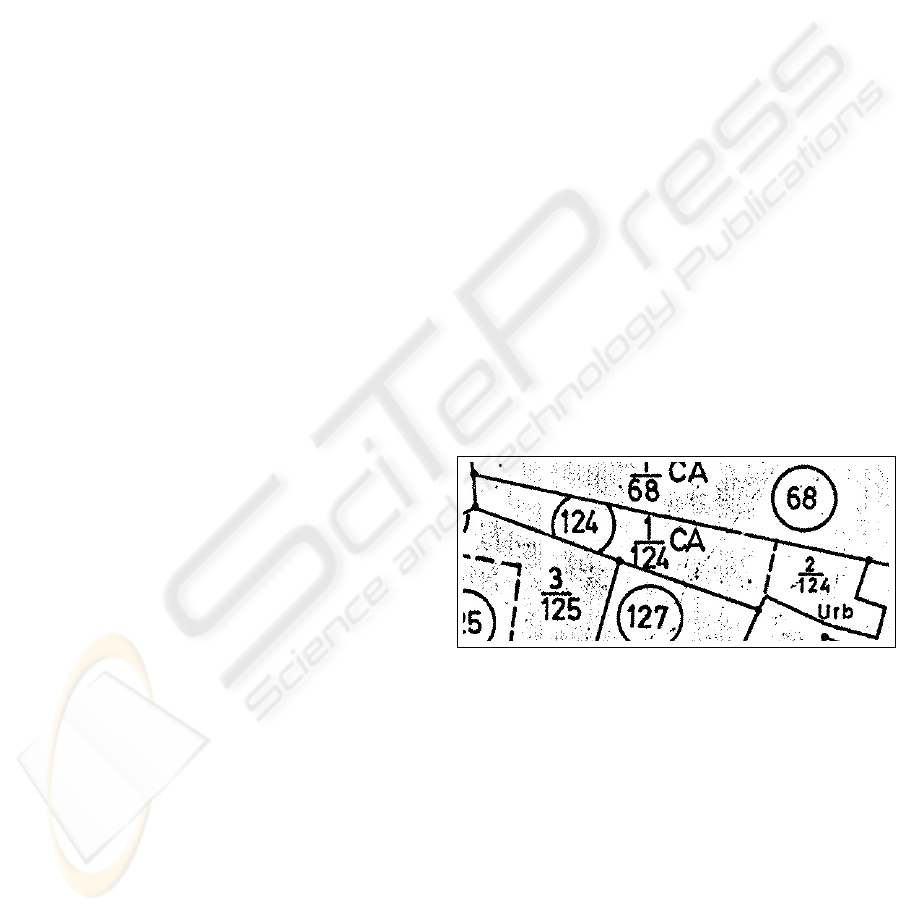
The automatic extraction of the closed contours in
this type of maps has many difficulties namely gaps in
contour, elements connected on contour and also the
crossing of lines on contour (see figure 1). Further-
more, it is necessary to associate each parcel using
the circle position with its closed contour.
Figure 1: Examples of some problems in the contour extrac-
tion such as gaps in contour, elements connected on contour,
the crossing of lines and also it is needed to associate a cir-
cle with a contour.
In the literature, there is not any algorithm which
could solve all of these problems, but only simple
methods that can individually solve one problem.
Therefore, we use one algorithm to solve each prob-
lem, instead of trying to design a complex method to
fix all of them.
428
Candeias T., Tomaz F. and Shahbazkia H. (2006).
AUTOMATIC EXTRACTION OF CLOSED CONTOURS IN THE PORTUGUESE CADASTRAL MAPS.
In Proceedings of the First International Conference on Computer Vision Theory and Applications, pages 428-433
DOI: 10.5220/0001361304280433
Copyright
c
SciTePress

2 RELATED WORK
The image recognition problem can be seen on two
different perspectives, considering the pattern recog-
nition at pixel level or using segments from the vec-
torisation process. Those approaches can recognise
the graphical primitives in image but each one has
specific problems. Song et al. (Jiqiang Song and Cai,
2002b) discussed the recognition from binary images
using each one of these approaches, and they sug-
gested to use both, since neither of them is perfect
enough to handle all the difficulties.
The image recognition at pixel level should be
analysed in a hierarchic point of view, recognising the
features of the drawings from the simplest to the most
complex primitive. Song et al. (Song et al., 2002) con-
sidered that an engineering drawing can be seen as a
collection of lines, arcs, curves, simbols and strings.
In each recognition process the elements detected are
erased or segmented to simplify the next detections.
Dori and Wenyin (Dori and Wenyin, 1999) have
developed a vectorisation system for the mechanical
drawings, firstly doing a description of the image by
segments and detecting higher shapes as circles or
arcs later. But as our maps have elements connected
on contour, a vectorisation and followed by the recog-
nition of shapes would introduce many errors. There-
fore our choice was to analyse the image at pixel level
since it is less complex even though slower (Tombre
et al., 1999).
Song et al. (Jiqiang Song and Cai, 2002a) stud-
ied the vectorisation of engineering drawings at pixel
level and Dosch et al. (Dosch et al., 2000) studied a
system for the recognition of architectural drawings.
The French cadastral map is a completely differ-
ent sheet because it is older and has others types
of problems, Shahbazkia (Shahbazkia, 1998) studied
the recognition of the French cadastral maps. Also
Viglino et al. (Jean-Marc Viglino, 2003) are studying
the contour extraction in the French cadastral map.
The knoweledge on the Portuguese cadastral maps
(analysis domain) is available and we can use it to
simplify the contour extraction.
3 PROCESSING METHODS
The main stages of the cadastral maps recognition are
the detection of circles, the parcel’s number recog-
nition and the contour extraction. Since any parcels
have a contour associated, so the contour extraction
algorithm has as input the circle position to allow the
association with the contour.
The deformation of the image introduces noise and
degradation, and it is going to yield dirt and gaps
in the drawings. The cadastral maps have symbols,
dashes and circles over the contours as well. This su-
perposition difficults the extraction very much since it
is necessary to segment the two elements first.
It is important to deeply look for each problem of
the contour extraction to choose the algorithms that
can solve them. The main difficulties of this analy-
sis are the discontinuities, the elements connected and
the crossing of contour lines. The application of the
line following algorithm (Spinello and Guitton, 2004)
with waiting lists is very complex in the last situation
due to the variety of paths to follow. Furthermore the
line following algorithm does not solve the problem
of elements connected on contour, the association of
each parcel to the contour and neither the discontinu-
ities on it.
In the literature there is not any general method
solving all these problems, however for each problem
there is some possible solution. We chose that each
method had to solve one specific problem since we
think this improves the robustness of the application
and makes it simpler. Each algorithm has different
features and properties and all of them enable us to
solve most of the difficulties.
3.1 Block-Fill Algorithm
From the beginning, we tried to find out an off-the-
shelf method (Tombre et al., 1998) to implement the
contour extraction. Our first idea was to use the classi-
cal snakes algorithm (Kass et al., 1987) but as it needs
some control points and it did not always converge
due to the lack of grey value in image, we did not use
it.
As the method can start the analysis from the circle
position, the flood fill algorithm sounded better. As
some contours have gaps, we implemented an algo-
rithm based on the flood fill but using blocks. The in-
put image is pre-processed by a thinning (Tombre and
Tabbone, 2000) to detect the central contour points
since it is necessary to have the same segment be-
tween two neighbors contours.
The block fill algorithm starts the detection at the
circle position and fills the parcel with blocks of size
NxN. This algorithm is iterative, in the first iteration
the stack has only the circle position, in the second
the first block’s 4-neighbors if the blocks have not any
black pixel inside, the algorithm continues the filling
looking for the neighbor blocks (see figure 2).
The detection of the contour points is done con-
sidering the blocks that touch on the contour. Each
block has neighbor blocks outside of the contour and
they were tested in every directions to detect every
contour points. The goal is to detect as many points
as possible, however as there are parts of the contour
where it is impossible to detect all the points, it is nec-
essary to use a method of line following to detect the
contour points that are between the two parts already
AUTOMATIC EXTRACTION OF CLOSED CONTOURS IN THE PORTUGUESE CADASTRAL MAPS
429

(a) The initial image of a
closed contour.
(b) The block fill algo-
rithm in the thinned image.
Figure 2: Example of the block fill algorithm application.
detected. The line following algorithm is applicable
since we used a thinning of the contours and without
the non connected elements resulting in the contour
lines with one pixel width.
The block fill is the kernel of the contour extraction
and the next algorithms were implemented to solve
some problems of this algorithm.
3.2 Lohmann’s Algorithm
The first problem of the block fill algorithm is that
some blocks go out of the contour due to the large dis-
continuities. For instance, a large discontinuity can
appear when two small discontinuities are close, af-
ter segmenting the bigger from the smaller elements
(component labeling algorithm) the element between
the two discontinuities is erased. The goal of the
Lohmann’s algorithm (Lohman, 1995) is to segment
the inner contour that is open and has large disconti-
nuities.
Before applying the Lohmann’s algorithm, it is
necessary to have the distance transform (di Baja,
1994) of the thinned contour image. As the block fill
algorithm, this also has as input a point inside of the
contour. This algorithm is iterative and starts pushing
the input point into the stack. Following, the point of
the stack’s head is popped and from this position is
found out the maximum circle radius that touchs the
contour points. The algorithm then detects the local
maximums over the maximum circle radius and store
them into the stack. Once a circle is accepted as be-
ing inside of the contour, if there is not any end point
in the circle radius, then the points inside of the cir-
cle are painted with the black color in the distance
transform image to enable the convergence of the al-
gorithm. This process repeats until the maximum cir-
cle radius has a discontinuous point of the contour (a
point with only one neighbor), so the gap length is
calculated and if the circle is outside of the contour or
the gap length is bigger than a threshold value, then
is not considered, otherwise the expansion continues
and the maximum locals of the circles are pushed into
the stack.
(a) The blocks goes out-
side using the block fill al-
gorithm.
(b) The circles of the
Lohmann’s algorithm do
not go outside.
Figure 3: Example of the Lohmann’s algorithm behavior
with big discontinuities.
This process continues until the stack is empty. At
the end, the contour is filled with circles of different
sizes (see figure 3) allowing to segment the inner con-
tour.
After getting the list of circles that segment the con-
tour, we can only consider the blocks from the block
fill algorithm that are inside of at least one of these
circles. Therefore we can use the block fill algorithm
to detect only the points inside of the contour even
having big discontinuities.
3.3 Seed-Segment Algorithm
Another problem happens when the symbols are con-
nected on the contour. A consequence of this fact is
that the parcel’s contour is empty or incomplete after
the application of the block fill algorithm. One pos-
sible solution is first segment the symbols from the
contour using a straight line detection algorithm such
as the hough transform algorithm (Jiqiang Song and
Cai, 2002c) but after some tests this algorithm did not
solve our problems since there are some curves in im-
ages.
A seed segment is a small rectangle with any ori-
entation that is characteristic of a straight line and it
is found considering some conditions. The seed seg-
ment algorithm (Song et al., 2000) starts looking for
seed segments in the image. This method detects the
straight lines in the image doing the line tracking from
the seed segment orientation.
Knowing some contour straight lines, it is easy to
segment the symbols from the solid line. The figure 4
shows an element connected to the contour, but after
the application of the line tracking, it is possible to de-
VISAPP 2006 - IMAGE ANALYSIS
430
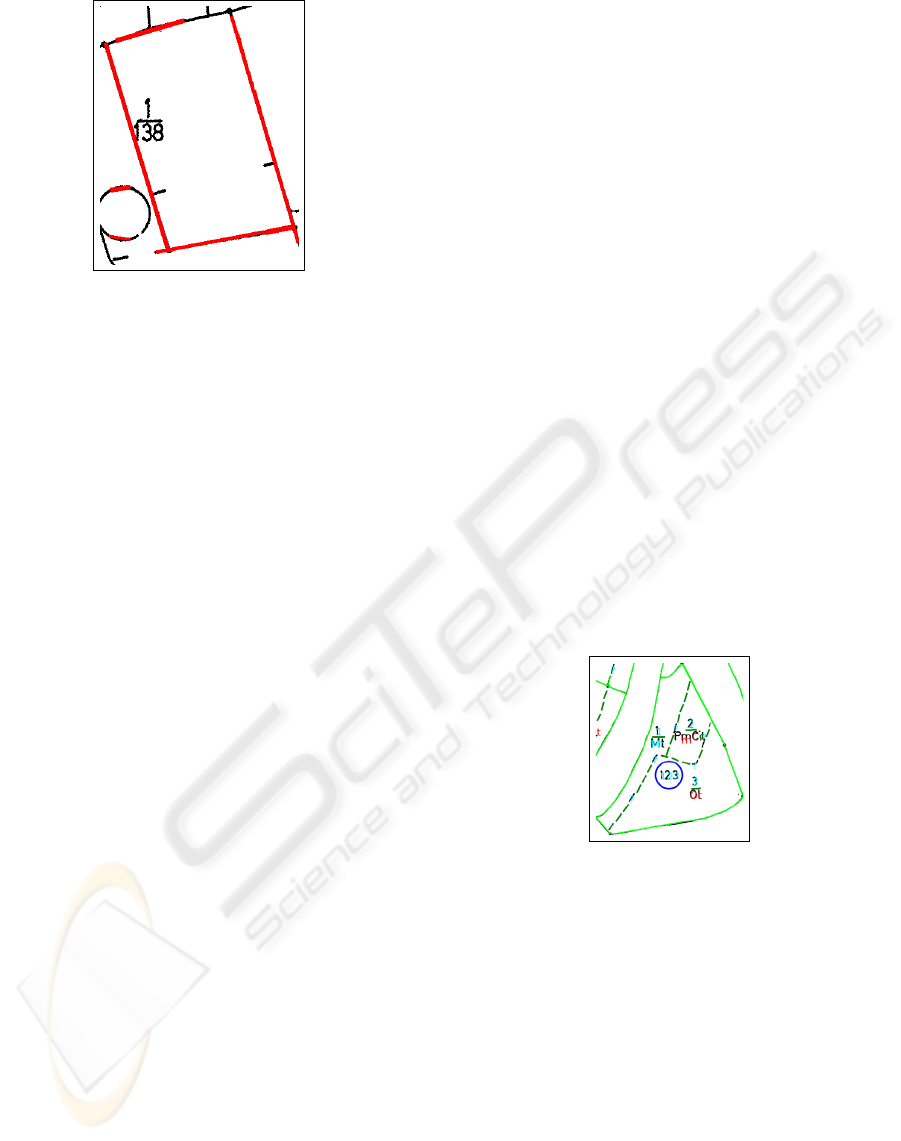
Figure 4: Segmentation of the characters and the dashes
from the contour.
tect some straight lines of the contour and segment the
elements from the contour. Finally, having the plain
contour we can apply the block fill algorithm again to
extract the contour points.
3.4 Rosin-West Algorithm
The contour extraction is implemented using the
block fill algorithm. After of the contour points are
obtained they are verified to assess if the contour has
big discontinuities or if the list of contour points is
too small. The Lohmann’s algorithm is used in the
first case while the seed segment algorithm is used in
the second one. After of the identification of the al-
gorithm to use, a window over the map is used with
center in the circle position. This is important to lo-
cally process each parcel since the two methods are
slow and the first one needs to calculate the distance
transform image and we do not need it to all the map.
After the application of the previous algorithms, it
is necessary to vectorize the contour. The contour
points are drew in an image and vectorized using the
Rosin-West algorithm (Rosin and West, 1989). At
the end of this process, the segments are obtained and
they can be post-processed by the next algorithm.
3.5 Segment Following Algorithm
The contour segments obtained from the vectoriza-
tion can have symbols or dashes connected on contour
and discontinuities. The dashes connected on contour
can be found considering that three segments have a
common point, the segment that represent the dash is
smaller than a threshold value and its orientation is
the most different of the three collinear segments.
If the contour has a discontinuity that is smaller
than a threshold value then we can close the contour
adding the necessary segment. This can be very useful
for small discontinuities since it happens frequently.
The problem of the symbols connected is more dif-
ficult to solve, it can be detected since there is a se-
quence of small continuous segments with different
orientations (there is not a stable sequence of orienta-
tions). These small segments were removed and the
contour is verified to see if it has only small disconti-
nuities by removing the segments, otherwise this is a
problematic situation. The dashes and symbols con-
nected to the contour are added to the list of the par-
cel’s objects.
At the end, if the contour is closed and every seg-
ments are used to follow the contour then the contour
is valid.
4 RESULTS AND DISCUSSION
We developed our algorithms using a set of 5 cadas-
tral maps with A0 size and digitalised, a map has in
average 10 000x8 000 pixels. A map is a huge sheet
and has a great quantity of information, so we can see
a huge diversity of shapes, symbols, characters and
contours in a single map. In each one, there are prob-
lems for the contour extraction but we have verified
that all of these drawbacks are contained in the cases
studied by the three algorithms. We consider the 5
cadastral maps studied representative of the diversity
of the Portuguese cadastral maps.
Figure 5: Example of a large contour without problems in
the extraction.
Our sheets have many types of contours but in most
cases they are large contours and there are not any el-
ements connected to the contour (see figure 5). The
gaps on contour frequently happen but these discon-
tinuities are small and the block fill algorithm is suf-
ficient to handle the problem. The big gaps are less
frequent since they are originated by two close dis-
continuities, and this is solved by the Lohmann’s al-
gorithm. The problem of the open contours with small
and big discontinuities are completely solved since
these contours are obtained without many problems.
In most cases the dashes connected on contour are
detected and this problem is considered solved too.
However, some dashes connected on contour are also
connected to characters and that difficults consider-
AUTOMATIC EXTRACTION OF CLOSED CONTOURS IN THE PORTUGUESE CADASTRAL MAPS
431
ably the problem. Thus, the simpler cases are solved
while the difficult problems are very specific and we
do not consider their solution yet, since we are look-
ing for general algorithms at this level of recognition.
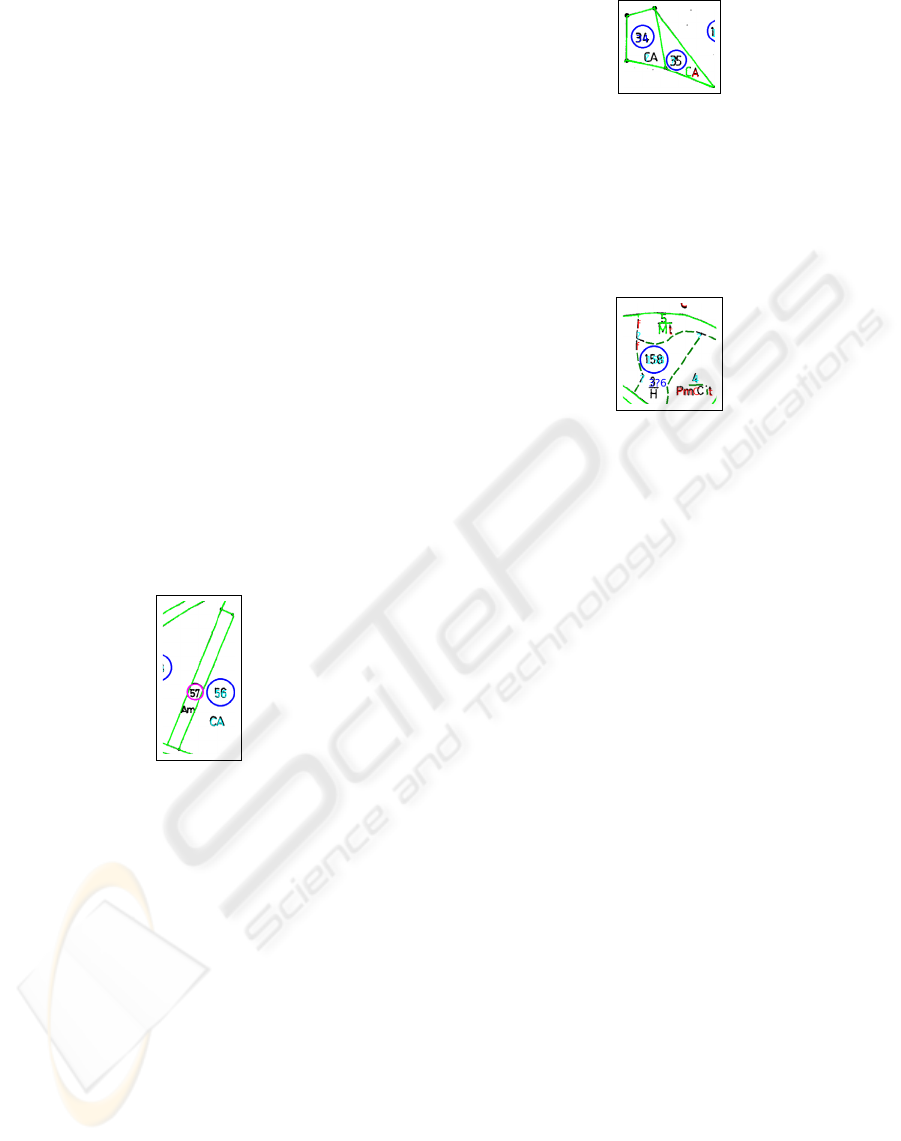
The problem of the characters connected on con-
tour is a more difficult problem. The seed segment al-
gorithm detects the straight lines but it does not detect
all the straight lines on the contour, so if a character is
connected on a curve or on a straight line that was not
detected, then the character is not erased. The contour
in figure 6 is composed by straight lines and in this
case is possible to segment the characters from the
contour. The contour post-process do not remove all
the characters connected on contour, since the method
previously described only remove the cases where the
character only has one segment collinear with the con-
tour. In the figures 7 and 8 we can see some difficult
problems of the contour extraction since in the first
case there is more than one segment collinear between
the contour and the character and in the second case
is the same situation and the element in on a curve. In
the other cases the problem is more difficult to detect
and we do not consider it yet. As this problem hap-
pens less than 5% in each map, we think that it is not
too problematic and do not influence considerably the
results.
Figure 6: Example of a thinned contour with some elements
connected.
The implementation of the algorithms were made
in different levels of abstraction. We started consid-
ering few contours and at the end we considered the
results of all the contours in 5 maps. The tunning of
the algorithms and the identification of all the prob-
lems is very important to improve the system. Since
the contour is extracted at a low level, so it is impor-
tant to consider only the main drawbacks and distinct
the particular from the general problems, avoiding in-
troduce more complexity into the main goal.
The results of the contour extraction are considered
good since the recognition rate is higher than 70% in
each map. Furthermore, the process of contour ex-
traction is fast, spending only 2 minutes on an Intel
Pentium IV at 3.0MHz, in average for each sheet.
The general classification of the system is good and
we consider that it is already a valid prototype, since
the system complexity level and the recognition rate is
balanced. We think that the ideas and concepts devel-
Figure 7: Example of characters connected to the contour.
oped are correct and the next steps should be the opti-
mization of the algorithms and the resolution of some
difficult problems. The algorithms works well in dif-
ferent types of maps namely urban or rural cadastral
maps.
Figure 8: Example of characters connected to a curved con-
tour.
5 CONCLUSIONS
Once the problems are complex and very different in
each map, the analysis should be made with simple
methods. The approach should be general and not
particular, so one method should solve only one prob-
lem. Because it is not possible to extract all the con-
tours from the maps, we should design the algorithms
to extract most of them. Thus, first the problems need
to be completely identified to choose the algorithms
features and to obtain a higher recognition rate.
The results are good and the system can extract
more that 70% of the contours in each maps. The
algorithms studied are sufficient to solve all the prob-
lems of the contour extraction of the Portuguese
cadastral maps. The recognition rate could be im-
proved solving particular problems but doing this
we will increase the system complexity and the im-
provement of the results are not a true consequence
again. This happens because the system should be
balanced between its complexity and the recognition
rate. Using the methods presented here we can con-
clude that the problem of the contour extraction is
globally solved.
ACKNOWLEDGEMENTS
This work was partially funded by the FCT (Fundac¸
˜
ao
para a Ci
ˆ
encia e Tecnologia), project ACID, contract
SRI/34257/99-00 - Automatic Cadastral Information
Digitalization.
VISAPP 2006 - IMAGE ANALYSIS
432

REFERENCES
di Baja, G. (1994). Well-shaped, stable and reversible
skeletons from the (3,4)-distance transform. Journal
of Visual Communication and Image Representation,
5(1):107–115.
Dori, D. and Wenyin, L. (1999). Sparse pixel vectorization:
An algorithm and its performance evaluation. IEEE
Trans. on PAMI, 21(3):202–215.
Dosch, P., Tombre, K., Ah-Soon, C., and Masini, G. (2000).
A complete system for analysis of architectural draw-
ings. International Journal on Document Analysis and
Recognition, pages 102–116.
Jean-Marc Viglino, M. P.-D. (2003). A vector approach for
automatic interpretation of the french cadatral map. In
ICDAR, pages 304–308.
Jiqiang Song, F. Su, H. L. and Cai, S. (2002a). Raster to
vector conversion of construction engineering draw-
ings. Automation in Construction, 11(5):597–605.
Jiqiang Song, M. Cai, M. L. and Cai, S. (2002c). A new ap-
proach for line recognition in large-size images using
hough transform. In Proc. IAPR International Confer-
ence on Pattern Recognition (ICPR02),Quebec City,
Canada, August 11-15, pages I:33–36.
Jiqiang Song, M. Cai, M. L. and Cai, S. (August 11-15
2002b). Graphics recognition from binary images:
One step or two steps. In Proc. IAPR International
Conference on Pattern Recognition (ICPR02), Quebec
City, Canada.
Kass, M., Witkin, A., and Terzopoulos, D. (1987). Snakes:
Active contour models. In Proc. of IEEE Conference
on Computer Vision, pages 259–268, London, Eng-
land.
Lohman, G. (1995). Computer Analysis of images and Pat-
terns, chapter A new method of extracting closed con-
tours using maximal discs. Lecture Notes in Computer
Science 970, Springer-Verlag. V. Hlavac and R. Sara.
Rosin, P. L. and West, G. A. (1989). Segmentation of edges
into lines and arcs. Image and Vision Computing, 7(2),
pages 109-114.
Shahbazkia, H. (1998). Reconnaissance invariante et ac-
quisition de connaissance: application au traitement
automatique des plans de cadastre franc¸ais. PhD the-
sis, Universit
´
e Louis Pasteur de Strasbourg.
Song, J., Su, F., Tai, C., and Cai, S. (2002). An object-
oriented progressive-simplification based vectoriza-
tion system for engineering drawings: Model, algo-
rithm and performance. IEEE Transaction on Pattern
Analysis and Machine Intelligence, 24(8):1048–1060.
Song, J., Su, F., Tai, C., Chen, J., and Cai, S. (Jun. 2000).
Line net global vectorization: an algorithm and its
performance evaluation. In Proc. IEEE International
Conference on Computer Vision and Pattern Recogni-
tion (CVPR?00), South Carolina, U.S.A., pages 383–
388.
Spinello, S. and Guitton, P. (2004). Contour line recognition
from scanned topographic maps. In WSCG (Winter
School of Computer Graphics).
Tombre, K., Ah-Soon, C., Dosch, P., Habed, A., and Masini,
G. (1998). Stable, Robust and Off-the-Shelf Meth-
ods for Graphics Recognition. in Proceedings of the
14th International Conference on Pattern Recogni-
tion, Brisbane (Australia), pages 406–408.
Tombre, K., Ah-Soon, C., et al. (september 1999). Sta-
ble and robust vectorization: How to make the right
choices. Proceedings of Third IAPR International
Workshop on Graphics Recognition (Jaipur, India),
pages 3-16.
Tombre, K. and Tabbone, S. (september 2000). Vectoriza-
tion in graphics recognition: To thin or not to thin.
Proceedings of 15th International Conference on Pat-
tern Recognition, Barcelona (Spain), 2, pages 91-96.
AUTOMATIC EXTRACTION OF CLOSED CONTOURS IN THE PORTUGUESE CADASTRAL MAPS
433
