
VISION-BASED TRACKING SYSTEM FOR HEAD MOTION
CORRECTION IN FMRI IMAGES
Tali Lerner and Ehud Rivlin
Department of Computer Science, Technion-Israel Institute of Technology, Haifa 32000, Israel
Moshe Gur
Department of Biomedical Engineering, Technion-Israel Institute of Technology, Haifa 32000, Israel
Keywords:
fMRI, pose estimation, motion correction, tracking.
Abstract:
This paper presents a new vision-based system for motion correction in functional-MRI experiments. fMRI
is a popular technique for studying brain functionality by utilizing MRI technology. In an fMRI experiment
a subject is required to perform a task while his brain is scanned by an MRI scanner. In order to achieve
a high quality analysis the fMRI slices should be aligned. Hence, the subject is requested to avoid head
movements during the entire experiment. However, due to the long duration of such experiments head motion
is practically unavoidable. Most of the previous work in this field addresses this problem by extracting the
head motion parameters from the acquired MRI data. Therefore, these works are limited to relatively small
movements and may confuse head motion with brain activities. In the present work the head movements
are detected by a system comprised of two cameras that monitor a specially designed device worn on the
subject’s head. The system does not depend on the acquired MRI data and therefore can overcome large head
movements. Additionally, the system can be extended to cope with inter-block motion and can be integrated
into the MRI scanner for real-time updates of the scan-planes. The performance of the proposed system was
tested in a laboratory environment and in fMRI experiments. It was found that high accuracy is obtained even
when facing large head movements.
1 INTRODUCTION
Magnetic Resonance Imaging (MRI) technology
plays a central part in human brain research in the
last decade (Belliveau et al., 1991; Bandettini et al.,
1992). The utilization of MRI for brain functional-
ity studies is referred to as functional MRI (fMRI).
In fMRI studies a subject is requested to perform a
task while his brain is repeatedly scanned. These
tasks may include viewing images, listening to dif-
ferent sounds, performing a mathematical calculation
and others. Statistical techniques are applied on the
acquired fMRI scans in order to analyze the func-
tionality of the examined parts in the subject’s brain.
The duration of an fMRI experiment may be rela-
tively long (tens of minutes). During this time the
subject is requested to avoid head movements in order
to acquire aligning MRI scans along the experiment.
The subject’s head is stabilized (with pads) to prevent
large head movements. However, small perturbations
and slow drift of the head position are practically un-
avoidable. These motions deteriorate the alignment of
scans that were acquired at different time instances,
and therefore reduce the credibility and the accuracy
of the statistical analysis (see Fig. 1). It is desirable
to correct these displacement effects in the MRI slices
before analyzing them.
The problem of motion correction in fMRI slices
is discussed in several previous studies. Most stud-
ies derive the motion parameters from the acquired
slices using different methods. These image-based
techniques tend to fail in the presence of relatively
large displacement. Additionally, due to brain activ-
ities, the gray levels of the image vary and may be
confused with the head motion effects leading to a re-
duction in the accuracy of the motion estimates. Some
of these studies handle 2D displacement in each slice
separately and overlook the 3D nature of the head
movement. Other studies extract the 3D motion pa-
rameters from the MRI slices under the assumption
that no motion had occurred during the block (a set
of subsequent MRI slices) acquisition but rather only
between the different blocks.
The most traditional approach for finding the mo-
tion parameters is to compute the 2D transformation
which best aligns a shifted image with a reference im-
213
Lerner T., Rivlin E. and Gur M. (2006).
VISION-BASED TRACKING SYSTEM FOR HEAD MOTION CORRECTION IN FMRI IMAGES.
In Proceedings of the First International Conference on Computer Vision Theory and Applications, pages 213-220
DOI: 10.5220/0001370202130220
Copyright
c
SciTePress

T
Figure 1: Illustration of the slice misalignment caused by
the head motion. The acquired slices after the motion do
not align with the original slices.
age. The alignment techniques can be classified into
two groups: image intensity based and Fourier space
based. The image intensity based group includes the
works (Woods et al., 1992; Woods et al., 1993) which
suggest defining images as being effectively the same
when their voxel-by-voxel ratio is a constant. (Haj-
nal et al., 1995) suggests defining the difference be-
tween images using the mean square voxel-by-voxel
error. Other intensity based works can be found in
(Friston et al., 1996; Thesen et al., 2000; Ciulla and
Deek, 2002). The Fourier space alignment techniques
detect the motion parameters using Fourier methods
that can be applied on the raw data of MRI images
since it is collected in that domain. Examples of such
techniques can be found in (Zoroofi et al., 1996; Kim
et al., 2002; Caparelli et al., 2003). A different ap-
proach can be found in (Derbyshire et al., 1998). The
described real-time system extracts the 3D position of
the subject’s head from an external source of informa-
tion. Three coils are attached to the subject’s head and
their spacial location is monitored using magnetic res-
onance techniques. The computed motion is applied
on the MRI scan-plane in order to chase the subject’s
head. The disadvantage of this system is the limited
number of features (the coils) that lead to poor esti-
mation of head position.
In the present work a new vision-based solution to
the head motion correction problem is presented. The
proposed system includes two calibrated and synchro-
nized cameras for tracking the movements of a spe-
cially designed device which is worn on the subject’s
head. The monitored motion is utilized to produce
motion-free MRI slices. Similarly to (Derbyshire
et al., 1998) the system computes the 3D motion pa-
rameters using an external source of information (the
optical tracking configuration), and therefore it can
overcome extremely large head motion. Although the
Figure 2: The system configuration. The subject is wear-
ing the device on his head and the two cameras monitor the
movements of the tracking device.
system presented here assumes no head motion dur-
ing the block acquisition it can be easily extended to
cope with inter-block motion when detecting the head
position for each slice separately.
The rest of this paper is organized as follows: Sec-
tion 2 gives a brief overview of the system. Section
3 describes the algorithms and devices used for the
system calibration. The algorithms and devices used
for the motion detection are described in Section 4.
A method for correcting the MRI data is presented in
Section 5. Section 6 elaborates on a series of lab ex-
periments and Section 7 shows qualitative and quanti-
tative results when applying the system in a real fMRI
experiment. Finally, conclusions are noted in Section
8.
2 SYSTEM OVERVIEW
The system presented in this work is composed of a
specially designed tracking device which is strapped
to the subject’s head, and two cameras with zooming
capability. The cameras are positioned on both sides
of the MRI bed and monitor the movements of the
tracking device (see Fig. 2). When using the system,
three main stages are performed: system calibration,
head motion detection, and MRI blocks correction.
In the system calibration stage, the internal para-
meters of the two cameras and their relative position
are computed. Once this information is evaluated the
pose (position + orientation) of the subject’s head w.r.t
the cameras’ coordinate systems can be accurately de-
tected using stereopsis methods. Since the final objec-
tive is to correct the motion in the MRI slices, the head
motion w.r.t the MRI system is required. For that aim
the pose of the cameras w.r.t the MRI system is also
extracted during the calibration phase.
Once the system is calibrated the fMRI experiment
VISAPP 2006 - MOTION, TRACKING AND STEREO VISION
214

Figure 3: The calibration device designed for computing the
relative position of the cameras.
can begin. A head device is strapped to the subject’s
head during the experiment. Due to rigid body motion
laws a single motion transformation applies to both
the head and the head device. Therefore, by monitor-
ing the pose of the head device the head movements
can be deduced. Using the cameras relative position
w.r.t the MRI, the head motion transformation can be
expressed under the MRI coordinate system.
Finally, the MRI blocks can be corrected. Utiliz-
ing the head motion transformation, a compensating
transformation can be applied on the MRI blocks.
The generated motion-free blocks are the blocks that
would have been obtained in the absence of head mo-
tion.
3 SYSTEM CALIBRATION
The calibration procedure starts by obtaining the in-
ternal parameters of each camera using a standard
technique (Bouguet, ). Next, the relative pose be-
tween the two cameras and their pose w.r.t the MRI
system are estimated. The rest of this section elab-
orates on the methods and the custom made devices
that participate in these procedures.
3.1 Finding the Cameras Relative
Position
Extremely accurate pose estimates are required for
a qualitative motion correction of the fMRI slices.
For this purpose, a multi-camera pose estimation al-
gorithm, referred to as TwoCamPose, is presented in
Section 4.2. This algorithm requires the relative posi-
tion and orientation between the two cameras. The ac-
curacy of this connecting transformation significantly
influences the obtained accuracies of the TwoCam-
Pose algorithm. A calibration device composed of
three planes is designed. Two planes create an an-
gle of 120
◦
and the third plane is orthogonal to both
of them. On each plane a chessboard image was at-
tached (see Fig. 3). The 3D locations of the corners
on the three chessboards are known and serve as fea-
tures for the device pose computation. The fact that
(a) (b)
Figure 4: The phantom device designed for linking the cam-
eras to the MRI coordinate system.
the features constellation is not coplanar drastically
improves the accuracy of the obtained pose estimates.
The device is placed in several positions and its poses
w.r.t each of the cameras are computed. The connect-
ing transformation between the cameras is computed
as the composition of the device poses:
cam2
cam1
T =
cam2
device
T ·
device
cam1
T (1)
where
B
A
T represents the Euclidean transformation
from coordinate system A to B. The parameters of
these composed transformations are averaged to de-
rive the final estimate of the cameras relative position
and orientation.
3.2 Cameras Pose w.r.t the MRI
Coordinate System
Although the cameras’ relative position enables the
computation of the tracking device pose w.r.t the cam-
eras, the required information is its motion w.r.t the
MRI coordinate system. Therefore, the linking trans-
formation from the cameras coordinate system to the
MRI coordinate system is necessary. For this purpose
a device, referred to as phantom, is designed (see Fig.
4(b)). This device is composed of two main com-
ponents. At the front end a planar chessboard is in-
stalled. Using the TwoCamPose algorithm the pose
of the phantom device is obtained. At the back end,
a 120 × 120 × 50 mm water container is attached
see Fig. 4(a). This container is scanned by the MRI
scanner using high resolution parameters. Next, the
slices produced by the MRI scanner are registered to
the geometrical model of the container. In order to
acquire the 3D registration parameters with high ac-
curacy, sixteen stakes were added to the geometrical
structure of the container. Once the poses of the phan-
tom w.r.t the MRI system and the cameras are known,
the linking transformation between the cameras and
the MRI system is derived.
VISION-BASED TRACKING SYSTEM FOR HEAD MOTION CORRECTION IN FMRI IMAGES
215

Figure 5: The head device strapped to a subject’s head.
4 MOTION DETECTION
This section details the heart of the system that is pre-
sented in this paper. The detection of the subject’s
head motion is performed throughout the entire fMRI
experiment. A specially designed device is strapped
to the subject’s head and is monitored by the two cam-
eras. Later, the recorded information is analyzed in
order to compute the compensating transformations
for the MRI slices.
4.1 The Head Device
Monitoring the head movements is performed using a
device that is worn by the subject. The device is com-
posed of a strip which is placed on the subject’s head,
and two rods attached to it from both sides of the head
near his temples. These rods are linked together in
front of the chin to a tracking device that is monitored
by the cameras (see Fig. 5). The tracking device is
built of two 50× 80 mm planes that create an angle of
90
◦
between them. “L”-shaped features are arranged
in four rows on the tracking device planes. The fea-
tures in each row have a unique orientation which as-
sist in the correspondence solution. The features ori-
entation is detected by examining the direction of the
vector from the center of the L-feature bounding-box
to its gravity-center (see Fig. 6). The described con-
figuration of the tracking device enables obtaining the
head motion with high accuracy, as can be observed
in Section 6.
4.2 The “TwoCamPose” Algorithm
During the system calibration procedure the relative
position of the two cameras is computed. Utilizing
this piece of information, the pose of the tracking
device can be obtained in a straightforward manner:
first, the 3D location of each feature is separately
(a) (b) (c) (d)
Figure 6: Orientation classification method of the L-shaped
features on the tracking device. The cyan dot represents the
center of the feature’s bounding box while the purple dot
represents its center of gravity. The classification method
utilizes the direction of the green arrows shown in (a)-(d).
reconstructed w.r.t the cameras using a standard tri-
angulation algorithm (Hartley and Zisserman, 2000).
Next, the pose is computed from the 3D-to-3D fea-
ture registration (Umeyama, 1991). This approach
is advantageous because both steps have closed-form
solutions which make them computationally attrac-
tive. However, the triangulation step of the above ap-
proach overlooks the known 3D constellation of the
features. Since the pose estimation computation is
performed off-line, obtaining high accuracy is pre-
ferred over computational duration. Hence, an alter-
native method for the pose computation, referred to
as “TwoCamPose”, is proposed. Let p
i
be the 3D lo-
cation of the i’th feature w.r.t the coordinate system
of the model. Let t
12
and R
12
be the relative position
and orientation, respectively, between the two cam-
eras. Given the 2D measurements from each of the
cameras -
˜
I
i,1
and
˜
I
i,2
, this algorithm searches for the
pose that minimizes the objective-function:
n
i=1
v
i
(v
i
)
z
−
˜
I
i,1
2
+
R
12
v
i
+ t
12
(R
12
v
i
+ t
12
)
z
−
˜
I
i,2
2
,
(2)
where v
i
= R · p
i
+ t, R and t are the pose hy-
pothesis. The above function reflects the sum of the
squared distances between the 2D extracted features
from each camera and their reprojected 3D features
given a pose hypothesis. This function was mini-
mized using the Newton-Raphson optimization tech-
nique. Although the TwoCamPose algorithm is pre-
sented for only two cameras it can be easily extended
to an arbitrary number of cameras. The TwoCamPose
algorithm achieves more accurate pose estimates than
the triangulation technique as will be shown in Sec-
tion 6.
VISAPP 2006 - MOTION, TRACKING AND STEREO VISION
216

4.3 Construction of the
Compensating Transformation
By composing two poses of the tracking device w.r.t
the cameras, the device’s motion, and thus the sub-
ject’s head motion, is computed. Therefore, this mo-
tion transformation is also obtained w.r.t the cameras.
Since the fMRI slices are acquired w.r.t the MRI sys-
tem, the motion transformation must be expressed
w.r.t the same system. Consider two time instances:
t
0
and t
1
, before and after a single movement of the
head. Each time instance corresponds to a coordinate
system D
0
and D
1
attached to the tracking device.
Consider a point p
0
in the subject’s brain. Due to the
head movement this point is transferred to a new po-
sition p
1
. Since it is assumed that the tracking device
and the head move rigidly:
D
0
p
0
=
D
1
p
1
. (3)
In the above equation the left superscript describes
the coordinate system in which the vector is repre-
sented. Let
˜
T be the desired transformation between
the points p
0
and p
1
under the MRI coordinate sys-
tem. Using this transformation one can write:
MRI
p
1
=
˜
T ·
MRI
p
0
. (4)
The positions of p
0
and p
1
in the MRI system are
given by
MRI
p
i
=
MRI
D
i
T ·
D
i
p
i
(5)
where i =1, 2. Assigning Equation (5) to both sides
of Equation (4) yields:
MRI
D
1
T ·
D
1
p
1
=
˜
T ·
MRI
D
0
T ·
D
0
p
0
. (6)
Multiplying the left side of (6) by
D
1
MRI
T results:
D
1
p
1
=
D
1
MRI
T ·
˜
T ·
MRI
D
0
T ·
D
0
p
0
. (7)
Recalling (3), the multiplication of the three transfor-
mations must be the identity transformation I:
D
1
MRI
T ·
˜
T ·
MRI
D
0
T = I. (8)
Multiplying by the inverse transformations yields the
final result:
˜
T =
MRI
D
1
T ·
D
0
MRI
T. (9)
This transformation supplies a description of the sub-
ject’s head motion between two time instances during
the fMRI experiment.
In this work the first block is perceived as the ref-
erence block while the rest of the blocks are corrected
according to its position. As a result, the movements
between the reference block and the rest of the blocks
w.r.t the MRI coordinate system are computed as de-
scribed above. Similarly to (Derbyshire et al., 1998)
the
˜
T transformation could be supplied to the MRI
scanner in order to update the scan-planes position.
This way the slices chase the subject’s head position
during their acquisition and therefore no postprocess-
ing motion compensation is necessary.
T
~
Figure 7: Motion compensation in the fMRI slices. The
head movement transformation –
˜
T is applied to each of the
MRI slices’ grid points.
5 MOTION COMPENSATION IN
MRI SLICES
The motion compensation is the final step of the sys-
tem presented in this work. In this step, motion-free
slices are synthesized from the existing MRI slices us-
ing the head movement transformation -
˜
T . As men-
tioned above, a single transformation is assigned to
each block in the fMRI data. By applying this trans-
formation on the block, its slices chase the subject’s
moving head. Each slice is represented by a 3D regu-
lar and planar grid. The grid points represent the cen-
ter of voxels in the MRI scan. The location of the grid
points w.r.t the MRI coordinate system is supplied
by the MRI image format. In order to produce the
motion-free slice, the
˜
T transformation is applied on
each of the grid points (see Fig. 7). The new gray level
of the transformed grid point is determined by identi-
fying its eight surrounding voxels in the origin block
and applying trilinear interpolation on their gray level
values.
6 LAB EXPERIMENTS
A series of lab experiments were conducted to eval-
uate the ability of the TwoCamPose algorithm de-
scribed in section 4.2 to detect small motions and
compare its accuracy to the triangulation based 3D
reconstruction algorithm described in the same sec-
tion. The tracking device was attached to a robotic
arm and small motion was applied to it. The ex-
periment involved moving the tracking device along
VISION-BASED TRACKING SYSTEM FOR HEAD MOTION CORRECTION IN FMRI IMAGES
217

a constant direction by ten steps of 0.1 mm in or-
der to complete a trajectory of 1 mm. The motion
was translational only, no rotation was involved. The
eleven poses were estimated using the two evaluated
algorithms. Although the structure of the true tra-
jectory was known (pure translational motion along a
constant direction), its relative position w.r.t the cam-
eras was unknown. In order to overcome this obsta-
cle, least squares alignment was performed between
the true trajectory and the measured trajectory (the
eleven poses), and the distances between the two fit-
ted trajectories were measured. Three different trajec-
tories were examined. Each one aligned with one of
the main axes: X, Y, and Z. Tables 1 and 2 compare
the mean and maximal errors of the two evaluated al-
gorithms computed from the three trajectories. One
can easily observe that the TwoCamPose algorithm
achieves better results. The results of the experiment
indicate that motions as small as 0.1 mm can be de-
tected with high accuracy using the TwoCamPose al-
gorithm. These accuracies are very small compared
to the fMRI image resolution which is at least 1.75
mm in X and Y axes and 2.8 mm in the Z axis.
7 RESULTS
In this section the results that were obtained by the
system described in this work are presented. fMRI
experiments with a subject were conducted. The sub-
ject wore the head device and visual stimulations were
presented to him while his brain was scanned (see Fig.
2 for the experiment’s setup). Three experiments were
recorded. In the first one the subject was asked to
avoid motion as much as possible, in the second ex-
periment the subject was asked to move slightly; and
in the last experiment the subject was allowed to per-
form larger movements.
The algorithms described in this work were applied
on the recorded MRI blocks producing new motion-
free blocks. These corrected blocks were compared
to the original (uncorrected) blocks both qualitatively
and quantitatively. Figures 8 through 10 show an ex-
ample of the displacement and the correction quality
of a single slice. In each figure, the blue line repre-
sents the contour of the brain in the first block, the red
dashed line represents the contour of the brain taken
from another block, and the green dashed line rep-
resents the contour of the brain taken from the same
block after compensation. As can be observed, the
brain offset was correctly detected and compensated
even in cases of large head motion. In Fig. 11 the
average image of the corresponding slices taken from
all the original blocks is compared to the same one
taken from the corrected blocks. As can be observed,
the average image of the original blocks is blurred and
Figure 8: Motion compensation in a slice from the first ex-
periment (no intended motion).
unclear while these artifacts are significantly reduced
in its corrected counterpart.
In addition to the described qualitative results, a
quantitative comparison between the original and the
corrected blocks from the three experiments is pre-
sented in Table 3. Two measurements were used for
this comparison: correlation coefficient and Forbe-
nius norm. The correlation coefficient is computed
by:
c =
m
n
(R
mn
−
¯
R)(A
mn
−
¯
A)
(
m
n
(R
mn
−
¯
R)
2
)(
m
n
(A
mn
−
¯
A)
2
)
(10)
where A is a slice and R is its corresponding reference
slice.
¯
R and
¯
A are the mean values of the these slices.
The Forbenius norm value is defined as:
f =
m
n
(R
mn
− A
mn
)
2
. (11)
For both measurements the first block served as a
reference block. The similarity between each slice
and its corresponding slice in the reference block was
evaluated by the two measurements. The similarity of
the entire experiment was evaluated by averaging the
similarity measurement of all its slices. As shown in
Table 3 the alignment quality of the original blocks
deteriorates when the motion’s magnitude increases.
The corrected blocks, on the other hand, maintain
high and almost constant alignment quality for all mo-
tion types. These results verify the advantage of uti-
lizing the proposed system in fMRI experiments.
VISAPP 2006 - MOTION, TRACKING AND STEREO VISION
218

Table 1: Comparison of the translation errors in each trajectory between the TwoCamPose and the Triangulation algorithms
described in Section 4.2. The translation error is measured in mm.
Alg. X Y Z
Mean Max Mean Max Mean Max
TwoCamPose 0.0204 0.0335 0.0277 0.0721 0.0283 0.0559
Triangulation 0.0651 0.1308 0.0719 0.186 0.0602 0.1055
Table 2: Comparison of the rotation errors in each trajectory between the TwoCamPose and the Triangulation algorithms
described in Section 4.2. The angular error is measured in degrees.
Alg. φ θ ψ
Mean Max Mean Max Mean Max
TwoCamPose 0.0131 0.0197 0.0117 0.017 0.0115 0.0162
Triangulation 0.0801 0.1734 0.0619 0.1418 0.0736 0.1195
(a) (b) (c)
Figure 11: Average images comparison of the third experiment (relatively large intended motion). (a) a slice from the first
(reference) block. (b) the average image of the corresponding slices from all the original blocks. (c) the average image of the
corresponding slices from all the corrected blocks.
Table 3: In this table the original and corrected blocks are compared by the average correlation coefficient (Equation 10) and
average Forbenius norm (Equation 11) which were obtained from the three experiments.
Small Motion Medium Motion Large Motion
Correlation Forbenius Correlation Forbenius Correlation Forbenius
Original 0.9865 6.1136 0.9816 7.3265 0.9411 13.569
Corrected 0.9963 3.8939 0.9957 3.8394 0.9946 4.3644
8 CONCLUSIONS
In this paper a new vision-based system for motion
correction in fMRI experiments is proposed. The
quality of the experiment’s analysis significantly de-
pends on the magnitude of the subject’s head move-
ments while the MRI scans were acquired. Due to
the typical long duration of an fMRI experiment, head
motion is practically unavoidable. Most of the previ-
ous work in this field addressed this problem by ex-
tracting the head motion parameters from the acquired
MRI data. The system that was presented here de-
tects the head movements using two calibrated cam-
eras that monitor a head-device worn by the subject
during the experiment. The system does not depend
on the acquired MRI data and therefore can overcome
large head movements. Additionally, the system can
be extended to cope with inter-block motion and can
be integrated into the MRI scanner for real-time up-
dates of the scan-planes. As was shown in the lab
experiments, the head motion is detected with sub-
millimetric accuracy. The applicability of the system
was tested with subjects and proved to achieve a high
quality correction of corrupted MRI data even when
dealing with large head motion.
VISION-BASED TRACKING SYSTEM FOR HEAD MOTION CORRECTION IN FMRI IMAGES
219
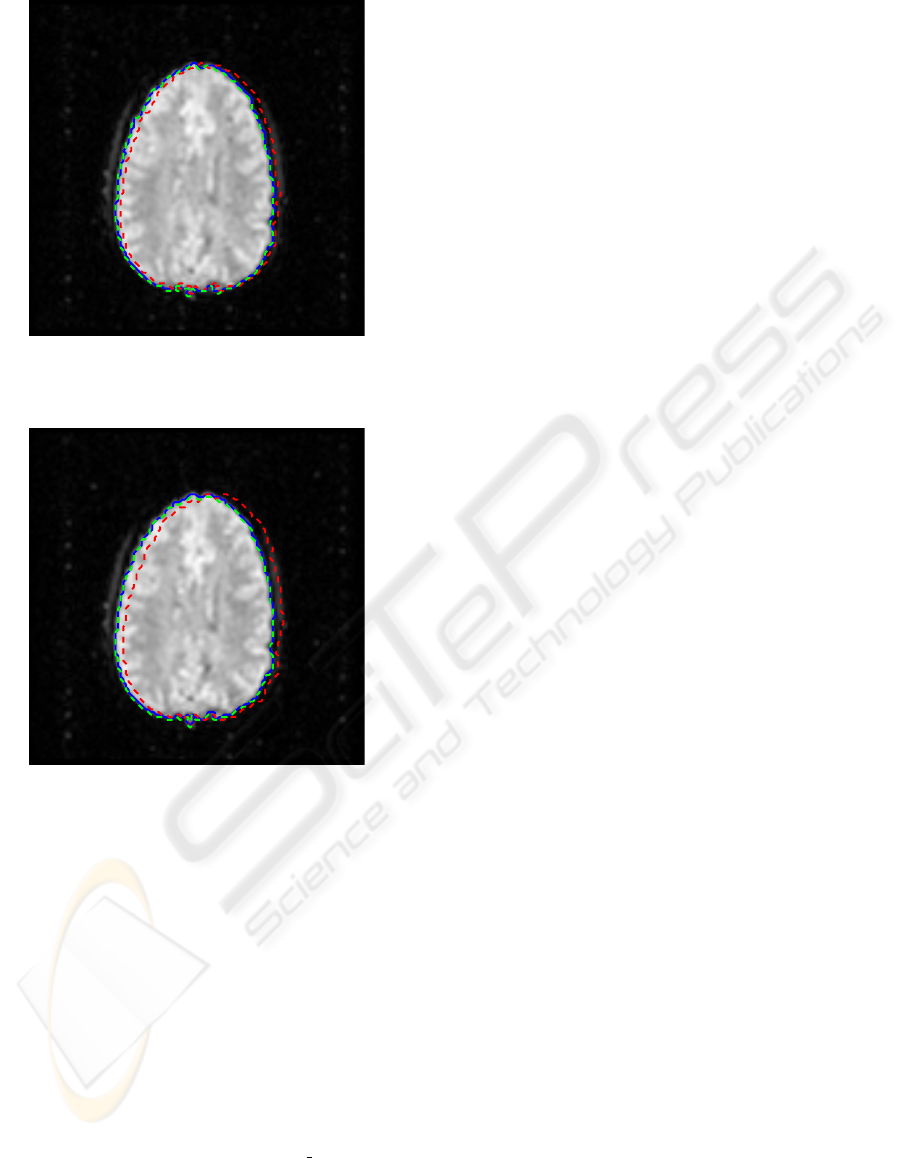
Figure 9: Motion compensation in a slice from the second
experiment (small intended motion).
Figure 10: Motion compensation in a slice from the third
experiment (relatively large intended motion).
REFERENCES
Bandettini, P., Wong, E., Hinks, R., Tikofsky, R., and Hyde,
J. (1992). Time course epi of human brain function
during task activation. Journal of Magn. Reson. Med.,
25:390–397.
Belliveau, J., Kennedy, D., McKinstry, R., Buchbinder, B.,
Weisskoff, R., Cohen, M., Vevea, J., Brady, T., and
Rosen, B. (1991). Functional mapping of the human
visual cortex by magnetic resonance imaging. Sci-
ence, 254:716–719.
Bouguet, J. Camera calibration toolbox for matlab.
www.vision.caltech.edu/bouguetj/calib
doc.
Caparelli, E., Tomasi, D., Arnold, S., Chang, L., and Ernst,
T. (2003). K-spaced based summary motion detection
for functional magnetic resonance imaging. NeuroIm-
age, 20:1411–1418.
Ciulla, C. and Deek, F. (2002). Performance assessment
of an algorithm for the alignment of fmri time series.
Brain Tomography, 14:NO. 4.
Derbyshire, J., Wright, G., Henkelman, R., and Hinks, R.
(1998). Dynamic scan-plane tracking using mr po-
sition monitoring. Journal of Magn. Reson. Med.,
5:924–932.
Friston, K., William, S., Howard, R., Frackowiak, R., and
Tuner, R. (1996). Movement-related effects in fmri
time-series. Journal of Magn. Reson. Med., 35:346–
355.
Hajnal, J., Saeed, N., Soar, E., Oatridge, A., Young, I., and
Bydder, G. (1995). A registration and interpolation
procedure for subvoxel matching of serially acquired
mr images. Journal of Computer Assisted Tomogra-
phy, 19:289–296.
Hartley, R. and Zisserman, A. (2000). Multiple View Geom-
etry in Computer Vision. Cambridge University Press,
Cambridge.
Kim, E., Park, N., Choi, M., and Tamura, S. (2002). Cancel-
lation of mri motion artifact in image plane. In IEEE
Intrumentation and Measurements.
Thesen, S., Hied, O., Mueller, E., and Schad, L. (2000).
Prospective acquisition correction for head tracking
for real-time fmri. Journal of Magn. Reson. Med.,
44:457–465.
Umeyama, S. (1991). Least-squares estimation of transfor-
mation parameters between two point patterns. IEEE
Trans. on Pattern Analysis and Machine Intelligence,
13,Journal of Computer Assisted Tomography:376–
380.
Woods, R., Cherry, S., and Mazziotta, J. (1992). Rapid auto-
mated algorithm for aligning and reslicing pet images.
Journal of Computer Assisted Tomography, 16:620–
633.
Woods, R., Mazziotta, J., and Cherry, S. (1993). Mri-
pet registration with automated algorithm. Journal of
Computer Assisted Tomography, 17:536–546.
Zoroofi, R., Sato, Y., S.Tamura, and Naito, H. (1996). Mri
artifacts cancellation due to rigid motion in the imag-
ing plane. IEEE Tran. on Medical Imaging, 15:NO.
6.
VISAPP 2006 - MOTION, TRACKING AND STEREO VISION
220
