
STATIC FOREGROUND ANALYSIS TO DETECT ABANDONED
OR REMOVED OBJECTS
Andrea Caroppo, Tommaso Martiriggiano, Marco Leo, Paolo Spagnolo, and Tiziana D’Orazio
Istituto di Studi sui Sistemi Intelligenti per l’Automazione - C.N.R. Via Amendola 122/D-I, 70126 Bari, ITALY
Keywords: Background Subtraction, Shadow removing, Abandoned or Removed Objects.
Abstract: In this paper, a new method to robustly and efficiently analyse video sequences to both extract foreground
objects and to classify the static foreground regions as abandoned or removed objects (ghosts) is presented.
As a first step, the moving regions in the scene are detected by subtracting to the current frame a referring
model continuously adapted. Then, a shadow removing algorithm is used to find out the real shape of the
detected objects and an homographic transformations is used to localize them in the scene avoiding
perspective distortions. Finally, moving objects are classified as abandoned or removed by analysing the
boundaries of static foreground regions. The method was successfully tested on real image sequences and it
run about 7 fps at size 480x640 on a 2,33 GB Pentium IV machine.
1 INTRODUCTION
Reliable detection of moving objects is an important
requirement for video surveillance applications. In
these systems, motion detection algorithms can be
used to determine the presence of people, cars or
other unexpected objects and then start up more
complex activity recognition steps.
In the literature, the problem of moving object
segmentation is discussed, identifying three different
kinds of approaches: optical flow (Fejes,1997 Fejes,
1998), temporal differencing (Paragios, 2000) and
background subtraction. In particular, methods based
on background subtraction, using an opportune
threshold procedure on the difference between each
image of the sequence and a model image of the
background, are recognized by the scientific
community as those that provide the best
compromise between performance and reliability.
Basically, these approaches consist of two steps: the
proper updating of a reference background model,
and the suitable subtraction between the current
image and the background model.
In the past, many approaches based on
background subtraction are proposed. Such methods
differ mainly in the type of background model and in
the procedure used to update the model. In (Quen-
Zong,2002) the authors propose a simple
background subtraction method based on
logarithmic intensities of pixels. They claim to have
results that are superior to traditional difference
algorithms and which make the problem of threshold
selection less critical. In (Monnet,2003) a
prediction-based online method for modeling
dynamic scenes is proposed. The approach seems to
work well, although it needs a supervised training
procedure for the background modeling, and
requires hundreds of images without moving objects.
Adaptive Kernel density estimation is used in
(Mittal,2004) for a motion-based background
subtraction algorithm. In this work, the authors use
optical flow for the detection of moving objects; in
this way, they are able to handle complex
background, but the computational costs are
relatively high. An interesting approach has been
proposed recently in (Li,2004). The authors propose
to use spectral, spatial and temporal features,
incorporated in a Bayesian framework, to
characterize the background appearance at each
pixel. Their method seems to work well in the
presence of both static and dynamic backgrounds.
Although many researchers focus on the
background subtractions, few papers can be found in
the literature for foreground analysis. In
(Connel,2004) the authors proposed a background
subtraction system designed to detect moving
objects in a wide variety of conditions, and a second
system to detect objects moving in front of moving
backgrounds. In this work, a gradient-based method
451
Caroppo A., Martiriggiano T., Leo M., Spagnolo P. and D’Orazio T. (2006).
STATIC FOREGROUND ANALYSIS TO DETECT ABANDONED OR REMOVED OBJECTS.
In Proceedings of the First International Conference on Computer Vision Theory and Applications, pages 451-456
DOI: 10.5220/0001373104510456
Copyright
c
SciTePress

is applied to the static foreground regions to detect
the type of the static regions as abandoned or
removed objects (ghosts). It does this by analysing
the change in the amount of edge energy associated
with the boundaries of the static foreground region
between the current frame and the background
image. By our knowledge, the performance of this
method could strongly depend on the technique used
to update the background and, moreover, they could
fail in presence of non uniform objects.
In this paper, we propose a motion detection
system, based on background subtraction algorithm,
able to classify static foreground regions as
abandoned or removed objects. It does this by a
template matching procedure between the edge of
the foreground region and the edge detected over the
segmented image. Moreover, in order to localize the
object in the scene, we have implemented a
homographic projection procedure that give the real
position in the scene.
The rest of the paper is organized as follow: an
overview of the proposed system is provided in
section 2, where motion detection, shadow
removing, discrimination between removed versus
abandoned objects, 3D localization algorithms will
be detailed; finally, section 3 presents instead the
experimental results obtained on the real image
sequences acquired by IEEE 1394 cameras in our
laboratory.
2 SYSTEM OVERVIEW
The proposed system processes the acquired images
by a motion detection algorithm performed through
background subtraction. In this phase, the
background is automatically built and updated by
temporal statistical analysis. After motion detection,
a shadow removing procedure is performed on each
image in order to discard shadow points that,
generally, deform the shape of the moving objects.
By analysing the edges, the system is able to
detect the type of static regions as abandoned object
(a static object left by a person) and removed object
(a scene object that is moved).
Finally, the real coordinates on the ground plane
of each static foreground region are extracted by
homographic projection.
Following subsections will explain the details of
each algorithmic step involved.
2.1 Motion Detection
The implemented motion detection algorithm for
moving object extraction is based on background
subtraction. It is composed of three distinct phases:
firstly, a model of the background needs to be
created; then a background subtraction procedure is
used to distinguish moving objects from static ones.
Finally, an updating algorithm adapts the
background to any variation in light conditions.
The background modeling algorithm
implemented is very reliable because it does not
require any assumption about the presence of
moving objects in the scene.
It uses a sliding window (of N frames) whose first
frame is assumed as the first coarse background
model, even if there are moving objects. Then, each
frame of this window is compared with the coarse
background: if a pixel value is similar (in all the
three color channels) to the correspondent in the
model image, mean value and standard deviation are
evaluated for that point.
Practically, for each pixel, 6 parameters are
considered:
BGRBGR
σσσµµµ
,,,,,
, where
n
µ
and
n
σ
represent respectively the mean value and the
standard deviation in the n-th color band.
After checking all frames of the examined
window, the statistical parameters are maintained
only for those pixels with intensity values similar to
the model for at least 90% of the whole considered
window.
After this, a new sliding window is examined
using as referring model the statistical parameters
where maintained and the intensity values in the first
image for those pixels for which the statistical
parameters are rejected in the previous step.
This procedure is iterated until a mean and a
standard deviation value have been estimated for all
the pixels.
After the model construction, the system is able
to automatically detect the presence of moving
objects. For this purpose, a simple subtraction
algorithm has been implemented. It is based on the
evaluation of the difference between current image
and the model; this difference is calculated for each
color band. A pixel will be considered as a moving
point if it differs more than two times from the
relative variance at least in one color band.
Formally, denoting with I
OUT
the output binary
image:
VISAPP 2006 - IMAGE ANALYSIS
452

⎪
⎪
⎩
⎪
⎪
⎨
⎧
>−∨
∨>−∨
∨>−
=
otherwise 0
),(*2),(),(
),(*2),(),(
),(*2),(),( if 1
),(
yxyxyxI
yxyxyxI
yxyxyxI
yxI
BBB
GGG
RRR
OUT
σµ
σµ
σµ
In order to make the system substantially
insensible to variations in light conditions, an
updating module has been implemented.
The characteristics of the application context
requires some specific constraints: in particular,
objects that differ from the background image have
always to be detected, that is they will be never
included in the background model in order to
maintain information about the presence of object
removed from the scene until anomalous conditions
will be restored.
So, the updating procedure starts from the output
of the last algorithm, and only the pixels
corresponding to static points (I
OUT
(x,y)=0) will be
updated. In detail, for each point, a weighted mean
between the historic value and current value is
carried out. The parameter α used for the updating
can vary in [0,1] and smoothes the relative relevance
of the current image instead of the background one
⎪
⎩
⎪
⎨
⎧
=
=−+
=
+
1I if
0I if*)1(*
OUT
OUT
1
t
R
t
R
t
R
t
R
I
µ
αµα
µ
.
2.2 Shadow Removing
After the background subtraction only the blobs
whose area is greater than a certain threshold are
maintained.
Unfortunately each preserved blob contains not
only the relative moving object but also its own
shadows. The presence of shadows is a great
problem for a motion detection system, because they
alter real size and dimension of the objects. This
problem is more complex in indoor contexts, where
shadows are emphasized by the presence of many
reflective objects; in addition shadows can be
detected in every direction, on the floor, on the walls
but also on the ceiling, so typical shadow removing
algorithms, that assume shadows in a plane
orthogonal with the human plane, cannot be used.
To prevent all these problems, correct shapes of
the objects must be extracted and to do that a
shadow removing algorithm is implemented.
The shadow removing approach described here
starts from the assumption that a shadow is a
uniform decrease of the illumination of a part of an
image due to the interposition of an opaque object
with respect to a bright point-like illumination
source. From this assumption, we can note that
shadows move with their own objects but also that
they do not have a fixed texture, as real objects do:
they are half-transparent regions which retain the
representation of the underlying background surface
pattern. Therefore, our aim is to examine the parts of
the image that have been detected as moving regions
from the previous segmentation step but with a
texture substantially unchanged with respect to the
corresponding background. To do it, we look for
moving points whose attenuation values, at each
color band, are similar; differently, moving points
belonging to true foreground regions will have
different attenuation values. In addition, these
attenuation value will be lower than 1, because of
the minor light that illuminates the shadow regions.
Formally, we evaluate, for each moving point (x,y)
the attenuation values S at each color band:
),(
),(
),(
yxB
yxI
yxS
R
R
R
=
),(
),(
),(
yxB
yxI
yxS
G
G
G
=
),(
),(
),(
yxB
yxI
yxS
B
B
B
=
where I
n
(x,y) and B
n
(x,y) are respectively the
intensity value in the n-th color band of the pixels
(x,y) in the current image and in the background
image.After this, pixels with an uniform attenuation
will be removed:
⎪
⎩
⎪
⎨
⎧
<∧
∧≅≅
=
otherwise
yxSyxSyxS
yxSyxSyxSif
yxI
BGR
BGR
OUT
1
1),(),,(),,(
),(),(),(0
),(
The output of this phase provides a motion image
with the real shape of the moving objects, without
noise or shadows.
2.3 Abandoned and Removed
Objects Detection
In many video surveillance applications is very
important to distinguish between abandoned and
removed objects.
When a static foreground region is detected, we
consider the segmented image (Fig. 1c), after
shadow removing step, relative to current frame
(Fig. 1b). The next step consists in applying an edge
algorithm around to the foreground region on the
segmented image, obtaining the image in Fig 1e.
The same portion is selected on the real image (Fig.
1b) on which the edge algorithm is newly applied
(see Fig. 1d). Now, the two images containing the
edges are matched and a similarity measure is
calculated. Finally, if this measure is more than a
predefined threshold then we decide that an object is
abandoned in the scene, otherwise we decide that an
object is removed from the background.
STATIC FOREGROUND ANALYSIS TO DETECT ABANDONED OR REMOVED OBJECTS
453

To perform edge detection, we use Susan
algorithm (Smith,2002), that is very fast and has
optimal performances.
Figure 1: An example of abandoned object in the corridor
of a laboratory; (a) background model, (b) current frame
with a red rectangle around the detected object, (c)
segmented image obtained by the procedure of motion
detection and shadow removing. Finally, (d) edges
detected in the red rectangle of the current image, (e)
edges detected in the red rectangle of the segmented
image.
Figure 2: An example of a removed object in a room of the
laboratory: (a) model of background, (b) current frame
with a blue rectangle around to the region of removed
object, (c) segmented image obtained by the procedure of
motion detection and shadow removing, (d) edges detected
in the blue rectangle of the current image, (e) edges
detected in the blue rectangle of the segmented image.
Figure 3: High-level code of the template matching
procedure between the two images containing the edges.
2.3.1 Procedure of Matching
High-level code of the procedure of matching
between the two images containing the edges.
a image vector of (A) Fig.3
b image vector of (B) Fig.3
// a and b are binary vector where 1
// indicates an edge point
N number of edge point of a
n number of edge point coinciding
between a and b
th threshold
N=0;
n=0;
for( i=0; i< size of ‘a’ ; i++)
{
if(a[i]==1) then
{
N=N+1;
If b == 1 around the point i then
{
n=n+1;
}
}
}
if ( (n*100)/N > th ) then
Abandoned Object
else
Removed Object
2.4 Objects Localization in the Scene
After Motion Detection, Shadow Removing and
Classification as abandoned or removed, each object
is localized in the 2D image plane but, due to the
perspective distortion, it is not possible to determine
its actual position in the 3D scene.
To localize the object in the 3D scene a further
step must be introduced. For each detected moving
region a point p is considered: the point p is obtained
as interception of a vertical line crossing the center
of the bounding box of the considered region and the
lower side of the same bounding box.
To localize the point p in the 3D scene an
homographic relationship between the image plane
and the ground plane is introduced.
The relation between the generic point in
homogeneous coordinates
),,,( kkzkykxP
iii
belonging
to the ground plane and its corresponding point
)1,,(
ii
vup in the image plane is:
P=Mp Æ
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎣
⎡
=
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎣
⎡
1
434241
333231
232221
131111
i
i
i
i
i
v
u
mmm
mmm
mmm
mmm
k
kz
ky
kx
(1)
To get the position in the scene of object
detected in the image plane the 11 unknown items of
the matrix M have to be computed (
43
m can be set
to 1 considering that this is an homogenous linear
system). The
ij
m elements can be discovered by
VISAPP 2006 - IMAGE ANALYSIS
454
considering 4 couples of points (each couple of
points generates three equations) for which the
coordinates both in the ground plane and in the
image plane are known a priori.
3 EXPERIMENTAL RESULTS
In this section, some experiments, performed in a
laboratory, demonstrate the effectiveness of the
method proposed. The algorithm runs about 7 fps for
color images at size 480x640 on a 2,33 GB Pentium
IV machine. Following subsections will show the
results of each algorithmic step.
3.1 Motion Detection and Shadow
Removing
Firstly, we only applied the motion detection
algorithm on the original images, shown in the first
column of Fig. 4, obtaining the results shown in the
second column of the same figure.
Figure 4: The figure shows the results obtained by motion
detection and shadow removing algorithms on images
acquired in a laboratory.
We notice that the real shape of moving persons is
largely modified due the presence of shadows,
moreover, in some cases, there is only one
foreground segmented region produced by two
moving persons.
This kinds of problems have been resolved by our
shadow suppression algorithm in a very good way as
it can be seen in the third column of the Fig. 4.
3.2 Abandoned and Removed
Objects Detection
The decision between removed/abandoned object
has been taken by the new technique that we have
introduced in subsection 2.3. This algorithm is based
on a template matching procedure that compute a
similarity measure between the edge detected on the
foreground region and the edge detected over the
segmented image. Therefore, the decision between
abandoned or removed objects is taken comparing
the obtained similarity measure with a established
threshold value. They have been carried out two
experiments, both in a corridor of our laboratory.
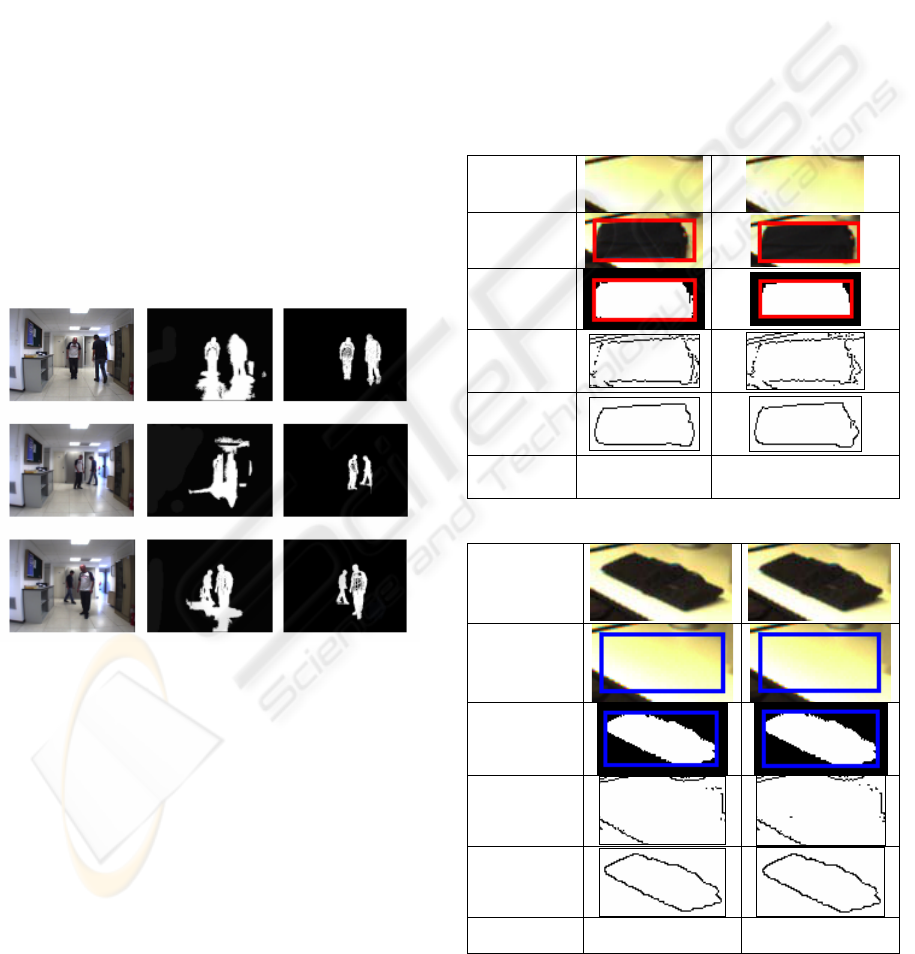
Table 1: First experiment in the laboratory: a bag is
abandoned on the desktop.
Background
Image
Current
Image
Segmented
Image
Edge
Current
Image
Edge
Segmented
Image
Matching
%
74 % 69 %
Table 2: Second experiment in the laboratory: a keyboard
is removed from the desktop.
Background
Image
Current
Image
Segmented
Image
Edge
Current
Image
Edge
Segmented
Image
Matching %
6 % 5 %
STATIC FOREGROUND ANALYSIS TO DETECT ABANDONED OR REMOVED OBJECTS
455

In the last row of the tables are reported the
matching percentages; generally, in our tests, we
decide for an abandoned object if the matching
percentage is more than 65% and we have labelled
the object with a red rectangle; on the other hand, we
established that an object was removed from the
background if the matching percentage is less than
30% and we have labelled the region with a blue
rectangle. If the percentage is comprised between
30% and 65%, the algorithm is not able to take a
decision. As shown in the tables, our procedure was
able to correctly classify the situations of
removed/abandoned objects in all experiments.
Finally, we note that when an object is abandoned
the matching percentage is very high, while when
the object is removed we obtain very low matching
values; this demonstrates the robustness of the
algorithm, since the choice of the threshold is not
critical.
3.3 Objects Localization
In figure 5A, it is possible to see a frame acquired by
the camera where the 4 green markers indicate the
point of the ground plane chosen to discover the
parameters of the homographic projection. The
reference coordinate systems for both the image
plane and the ground plane are shown in figure 5A
and 5C.
Figure 5: A) Frame acquired by the camera where the 4
green markers indicate the point of the ground plane
chosen to discover the parameters of the homographic
projection and the coordinate reference system used onto
the Image Plane. B) The point p used for the real
localization of the abandoned object. C) The coordinate
reference system used onto the Ground Plane. D) The
positions of the four points and the p point in the image
plane and the relative real position on the ground plane.
Onto the image plane the unit of measure is the
“pixel” whereas onto the ground plane it is
“centimeters”. In order to test the system, some
objects have been abandoned occasionally and their
position has been always correctly detected.
4 CONCLUSIONS
In this work, we proposed a new method to
efficiently analyse foreground. As a first step, an
adaptive background model on the RGB images
acquired by common digital cameras has been
implemented. After the detection of moving regions,
a shadow removing algorithm has been implemented
in order to clean the real shape of the detected
objects. Finally, we discriminate between abandoned
or removed objects by analysing the boundaries of
static foreground regions. Moreover, we are able to
localize them by homographic transformations. The
reliability of the proposed framework is shown by
large experimental tests performed in our laboratory.
REFERENCES
Fejes, S., Davis, L.S, 1997. Detection of independent
motion using directional motion estimation. Technical
Report. CAR-TR-866, CS-TR 3815. University of
Maryland
Fejes, S., Davis, L.S, 1998. What can projections of flow
fields tell us about the visual motion. ICCV’98, 4-7
Jan. Bombay, India
Paragios, N., Deriche, R., 2000. Geodesic Active Contours
and Level Sets for the Detection and Tracking of
Moving Objects. Pattern Analysis and Machine
Interface, IEEE Trans. on, Vol.22, 3 pp. 266-280
Quen-Zong Wu, Bor-Shenn Jeng, 2002. Background
subtraction based on logarithimc intensities. Patter
Recognition Letters 23, pp. 1529-1536
Monnet, A., Mittal, A., Paragios, N., Ramesh, V., 2003.
Background Modeling and Subtraction of Dynamic
Scenes. Proc. of Int. Conference on Computer Vision,
pp 1305-1312
Mittal, A., Paragios, N., 2004. Motion-based Background
Subtraction using adaptive kernel Density Estimation.
Proc. of International Conference on Computer Vision
and Pattern Recognition (CVPR), pp 302- 309
Li, L., Huang, W., Gu, I.,Y.,H., Tian, Q., 2004 Statistical
Modeling of Complex Backgrounds for Foreground
Object Detection. IEEE Trans. on Image Processing,
Vol. 13, No. 11
Connell, J., 2004. Detection and Tracking in the IBM
People Vision System. IEEE ICME
Smith., S.M., 1992. A new class of corner finder. Proc. 3rd
British Machine Vision Conference, pages 139-148
VISAPP 2006 - IMAGE ANALYSIS
456
