
ENHANCING IMPACT CRATER CONTOURS
TO INCREASE RECOGNITION RATES
Lourenço P.C. Bandeira, José Saraiva, Pedro Pina
CVRM/Centro de Geo-Sistemas, Instituto Superior Técnico, Av. Rovisco Pais, 1049-001 Lisboa, Portugal
Keywords: Impact craters, Mars, automatic recognition.
Abstract: This paper introduces an enhancement to the edge detection procedures that are part of a general
methodology which aims at increasing the robustness of the automatic recognition of impact craters on
planetary surfaces. It is demonstrated that the proposed improvement is a major contribution to increase the
recognition rates and to simultaneously diminish the rates of false positives. Its performance is evaluated
through a comparison with other classic edge detectors, which are applied to a set of images of the surface
of Mars acquired by the MOC instrument aboard Mars Global Surveyor, a probe currently orbiting the
planet.
1 INTRODUCTION
The identification and counting of impact craters is
an approach that has been widely used when
establishing the chronology of planetary surfaces
(Hartmann and Neukum, 2001). The early manual
crater counts on optical images can now be aided by
several semi-automatic approaches from the image
processing and pattern recognition fields - Homma
et al. (1997), Honda and Azuma (2000), Leroy et al.
(2001), Costantini et al. (2002), Vinogradova et al.
(2002), Michael (2003), Flores-Méndez (2003), Kim
and Muller (2003), Brumby et al. (2003), Magee et
al. (2003), Plesko et al. (2004), Barata et al. (2004),
Kim et al, (2004), Earl et al. (2005) and Matsumoto
et al. (2005) – but the generalization of procedures
still meets with evident difficulties. Even in a recent
study (Neukum et al., 2004) in which a refinement
of chronology was proposed for a number of small
areas of the surface of Mars, automatic recognitions
were not fully trusted, and ended up being edited
and manually corrected by human experts. The
difficulties faced are many, and are due to several
reasons: the different types of terrain, which produce
different scattering behaviours; the conditions of
illumination of the scene; the state of the atmosphere
(when it exists); the location of the sensor; possible
confusion with structures which show similar
morphologies (volcanic craters, small valleys or
basins, collapse structures); the existence of crater-
saturated areas where overlapping structures are
very frequent; and the degradation of structures by
weathering agents (wind, dust, ice, water) and
endogenous geological activity (faulting, eruptions).
The majority of the approaches published so far
have a quite similar structure: in a first step, the
image is screened for edges that correspond to the
borders or rims of craters, and these are selected as
candidate regions to be used as input for a second
step, a matching procedure. So far, the efforts have
been more focused on developing the matching
phase than on the edge detection one. Thus, as we
feel that any improvement that can be achieved in
this complicated realm of application can have an
important outcome in the final recognition result, we
decided to pay more attention to the edge detection
phase. Our aim is to supply better candidate regions
to the subsequent matching phase, with the goal of
increasing the recognition rate and at the same time
substantially diminishing the recognition of false
positives, i.e., structures that are not craters and that
are frequently and wrongly recognized as such.
The variety of textural characteristics which
occurs between the images (when they are form
widely distant regions) but also within the same
image (covering a smaller region) makes it hard to
choose a general and single operator. The majority
of available edge detectors applied to the images of
the surface of Mars normally result in an excess of
bad candidates that are difficult to filter out, thus
producing unsatisfactory results. Hence, an edge
detector based on local information is envisaged, in
order to be adaptable to the common variations in
the surface features. We compare its results to other
classic approaches, in a non-exhaustive mode.
407
P. C. Bandeira L., Saraiva J. and Pina P. (2006).
ENHANCING IMPACT CRATER CONTOURS TO INCREASE RECOGNITION RATES.
In Proceedings of the First International Conference on Computer Vision Theory and Applications, pages 407-412
DOI: 10.5220/0001375104070412
Copyright
c
SciTePress

2 GENERAL METHODOLOGY
We are establishing and developing a general
methodology to automatically recognise impact
craters on planetary surfaces. Currently, it is being
tested with images from the surface of Mars
acquired mainly by the instruments MOC and
HRSC, the cameras aboard the Mars Global
Surveyor (NASA) and Mars Express (ESA) probes,
respectively.
The approach being followed is based on the
following main phases:
1. Pre-processing and evaluation of the
parameters of image acquisition.
2. Selection of candidate regions belonging to
crater rims (edge detection).
3. Crater recognition based on template
matching (several approaches are being
tested and the results compared, namely, the
FFT, the Hough transform and other recent
template matching algorithms).
This paper addresses the problems related to the
second of these phases. The difficulties presented by
traditional edge detectors lead us to propose another
but simple approach with important improvements
in the robustness of the automatic recognition.
3 EDGE ENHANCEMENT
Impact craters are characterized by a generally
circular shape, with a wide variation of contrast to
the surrounding terrains, a reason why edge
detection techniques can play a fundamental step in
crater recognition (Fig. 1). The search for edges in a
numeric image is one of the most studied problems
in image processing due to the very intuitive nature
of edges and their clear visual impression.
Figure 1: Image R0100925 acquired with the sensor
MOC/WA. The spatial resolution is 245 meters/pixel
(NASA/JPL/MSSS)
.
This section presents the different phases that
constitute the proposed edge detection algorithm.
This method is based on a local threshold approach
and detects an edge whenever a local variation of
grey-level is significant. The first requirement is to
determine a threshold that incorporates information
about the local variations in grey-levels in the
original image. For this purpose, the following steps
are taken:
1. A 3x3 mask M is centred over each pixel
ij
P
of the original image, in order to compute the local
maxima
ij
A , according to the equation:
[
]
mMMmA
ij
−
−
=
)max(),min(max (1)
where
m is the mean of the 9 pixels in the mask
M.
2. The threshold
t is then obtained, taking into
account the global range of the matrix A, a
procedure which can be translated by the following
rule:
[
]
)min()min()max( AAAt +
−
=
λ
(2)
where λ is a constant, defined by the percentage
of the range that is considered. All of the results
presented in this paper have λ = 0.2. This value
resulted from an experimental process of fine-tuning
driven by a search for the best result.
Next, this threshold
t is applied to each pixel A
ij
of matrix A, in order to compute the value (0 or 1)
that will be assigned to each new pixel
B
ij
of the
resulting binary image B.
This method produces binary images where only
highly contrasted local edges are selected.
Simultaneously this operation globally reduces the
noise.
In comparison to traditional edge detection
techniques (such as the first order derivative
operators developed by Sobel (1970), Roberts
(1965), Prewitt et al. (1966) and Canny (1986) and
the second order derivative method introduced by
Marr and Hildreth (1980) and designated as the
Laplacian of Gaussian (LoG)), this new algorithm
shows, in most situations, a better enhancement of
the rims, thus allowing a sharper definition of the
crater shapes and anticipating a more correct
recognition. This is illustrated by the image in Fig. 1
and the images with the edges detected by all the
methods mentioned in Fig. 2.
Fig. 1 illustrates the fact that, sometimes,
features that can be easily identified as craters by the
human eye can be extremely hard to recognize by
computational methods. For instance, the rim of the
larger crater that can be seen on this image does not
VISAPP 2006 - IMAGE ANALYSIS
408
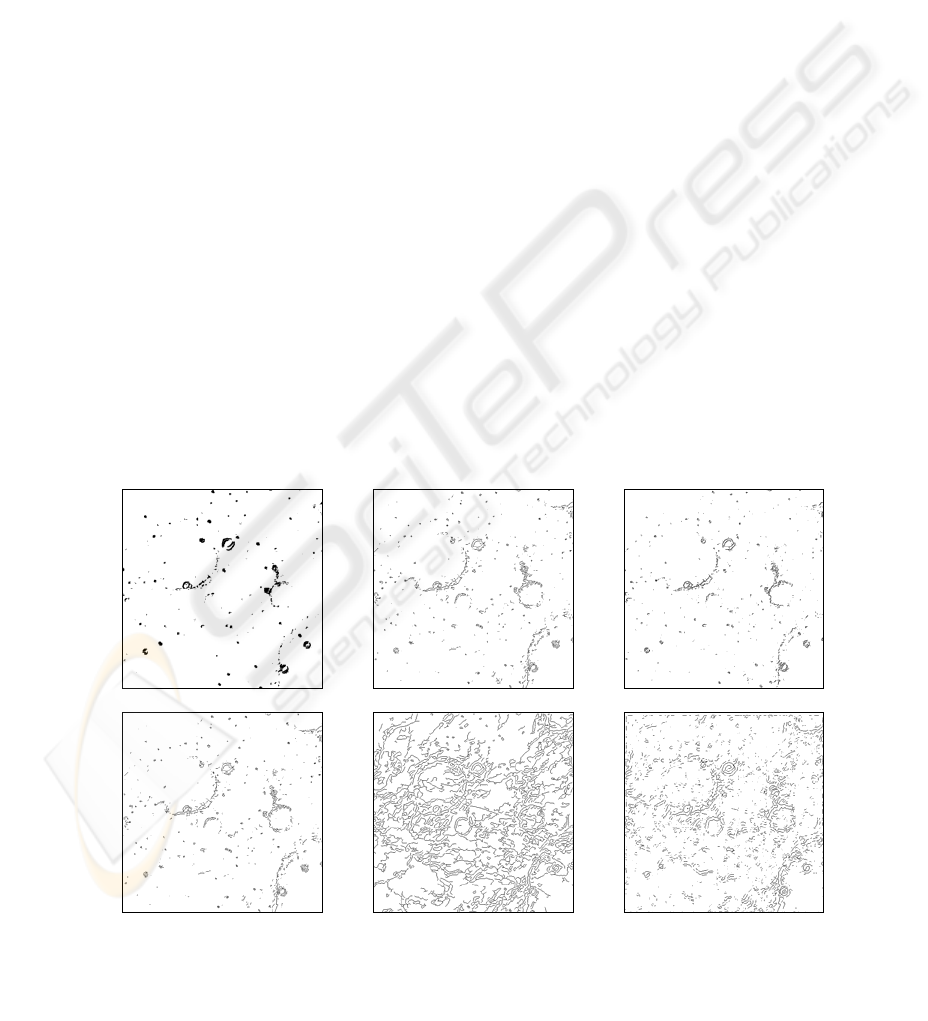
(a) (b) (c)
(d) (e) (f)
Figure 2: Edge detection results using: (a) the proposed method; (b) Sobel; (c) Roberts; (d) Prewitt; (e) Canny and (f)
LoG.
present enough contrast to be clearly detected by any
of the methods employed (Fig. 2).
From the six images presented one can gather
that the different operators naturally produce
differing results. It is perceivable at once that the
results given by the Canny and LoG operators (Fig.
2e and Fig. 2f, respectively) are not at all suitable for
crater recognition. The typical retention of major
details by these two approaches becomes a drawback
since they are very sensitive to low-frequency
perturbations, which are a major feature of the
images from the surface of Mars. It can also be
noticed that, as expected, the Sobel, Roberts and
Prewitt operators produce very similar results (Fig.
2b, Fig. 2d and Fig. 2e, respectively), with the
Roberts operator detecting a smaller number of
minor edges than the other two. Finally, our
approach produces an image (Fig. 1a) where the
contours with higher contrast become reinforced: the
resulting edges are thicker and a merging of adjacent
regions occurs, producing a smaller number of
connected components (and avoiding the problem of
double edges, a consequence of the long shadows
produced by the topography of crater rims and the
angle of the sun). Moreover, the smaller edges with
low local contrast are not retained, which means that
we end up with a less noisy image.
4 CRATER RECOGNITION
The results (binary images) obtained by the
application of the edge detection techniques
mentioned were used as input for a method for crater
recognition that is still in development (phase 3 of
our general methodology). Currently the best results
are obtained by a procedure based on a template
matching approach, through the application of the
Fast Fourier Transform (FFT). The general sequence
of this crater recognition method is the following:
1. Template matching with a simple circular
crater model (a crown) using the FFT approach;
2. Analysis of the correlation matrix in order to
find the local maxima;
3. Selection of the maxima in the correlation
matrix according to a circularity index.
These steps are performed for each crater radius
value within a certain predefined range (normally
from 5 to 100 pixels).
This sequence was performed with our approach
and with two other edge detectors (Sobel and
Roberts). Since the Prewitt operator images were
very similar to the ones given by the Sobel operator
it was decided to work only with the latter. For
illustrating purposes, the craters recognized in the
image of Fig. 1 with these three operators are
presented in Fig. 3. From the 14 craters that can be
visually detected in Fig. 1 (craters with very small
ENHANCING IMPACT CRATER CONTOURS TO INCREASE RECOGNITION RATES
409
radius were not considered), our approach was able
(a) (b) (c)
Figure 3: Crater recognition results for image of Fig. 1 using: (a) the proposed method; (b) Sobel; (c)
Roberts.
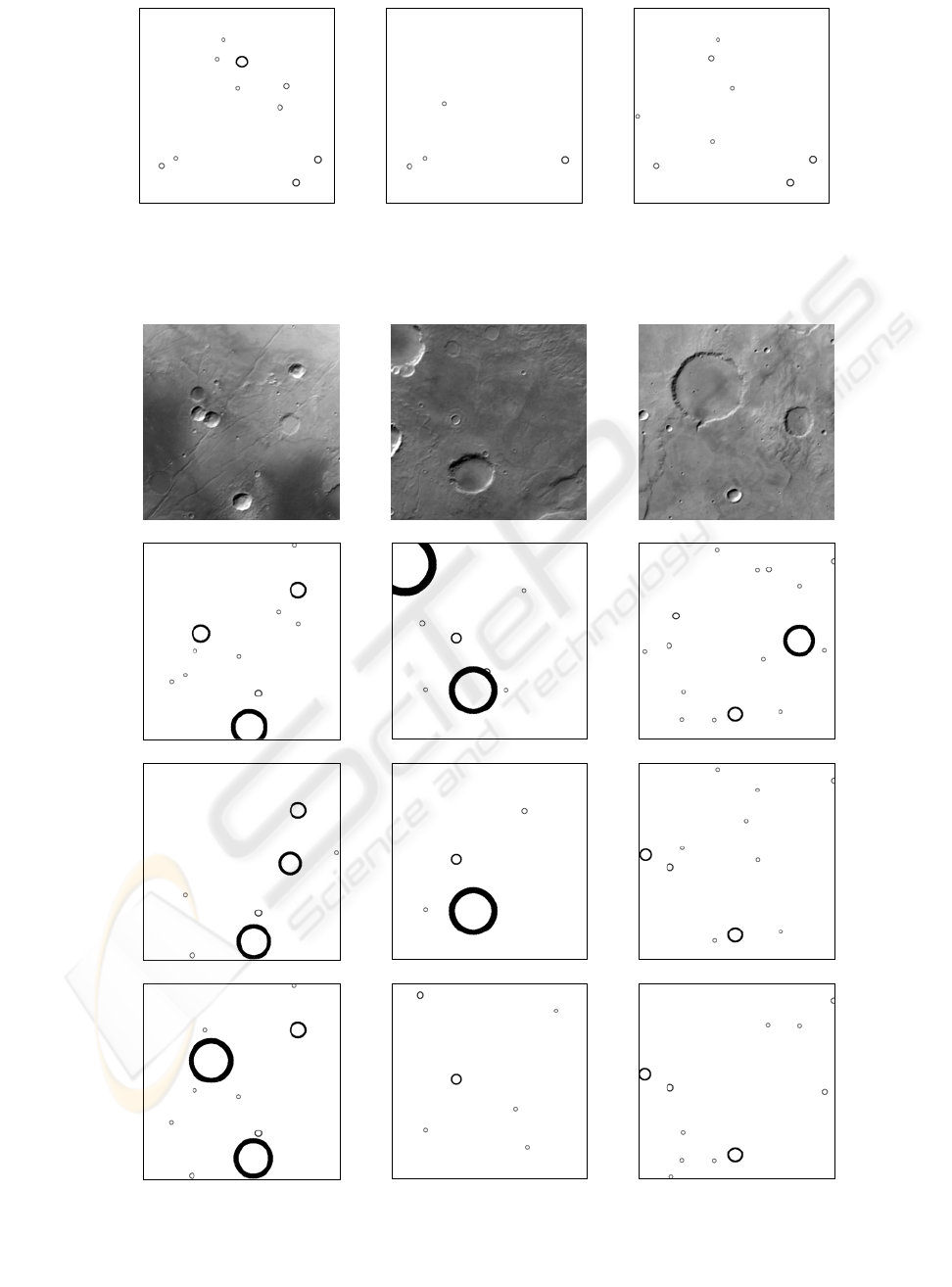
(a) (b) (c)
(d) (e) (f)
(g) (h) (i)
(j) (k) (l)
Figure 4: Crater recognition results for images (a) E1900566; (b) E1900716 and (c) R0200837 using: (d, e, f) the
proposed method; (g, h, i) Sobel operator and (j, k, l) Roberts operator. [NASA/JPL/MSSS].
VISAPP 2006 - IMAGE ANALYSIS
410

to detect 9 true craters (64% of success) and only
one false one (Fig. 3a). The Roberts operator
detected a total of 8 objects, from which 7 (50%)
were true craters and 1 was false (Fig. 3b). On other
hand, the Sobel operator (Fig. 3c) did not put in any
false crater, but instead was only able to recognize 3
true craters (21%).
Other examples applied to quite different images
are presented in Fig. 4.
Although globally our approach is the best one,
with higher recognition rates among the three and
lower number of false crater recognitions, there are
some points that deserve to be mentioned.
For the image E1900566 (Fig. 4a), our approach
and the Sobel operator are not able to detect the
crater located at right centre, which the Roberts
operator is able to recognize. This is sometimes the
price to be paid when the detection of false craters is
to be kept low: our approach and the Sobel operator
add both one single false crater (Fig. 4d and Fig. 4g,
respectively) while the Roberts operator includes 3
additional fake structures (Fig. 4j). The linear edges
that are visible in this image do not disturb the
recognition (but this is due to the matching approach
followed).
The results obtained on image E1900716 (Fig.
4b) by our approach (Fig.4e) demonstrate that the
craters can be recognized without being completely
included in the image (see the recognition of the
crater at top left corner) and also that overlap-ping
structures can be recognized without any problem.
A compromise between the detection of all the
craters and the inclusion of false craters is evident in
image R0200837 (Fig. 4c): our approach (Fig. 4f)
introduces one false crater but detects correctly 15
out of the 18 craters available; the Roberts operator
(Fig. 4l) does not add up any false crater but is only
able to detect 10 out 18 craters. Moreover, the
detection of the larger crater would be possible but it
would introduce an undesirable number of false
craters.
5 RESULTS, DISCUSSION AND
FUTURE WORK
We have applied three different edge detectors (our
approach, Sobel and Roberts) to a set of 26 images
obtained by the Mars Orbiter Camera aboard the
Mars Global Surveyor probe during the mapping
phase. These images, with a spatial resolution of
about 245 metres/pixel, cover a total area of
approximately 350000 km
2
, and were selected from
different regions of the planet so that the
methodology could be tried on the whole range of
cratered terrains present on its surface. The global
results can be seen in Table 1.
Table 1: Comparison of results between the proposed
approach and other edge operators.
Craters Our
approch
Sobel Roberts
# 157 98 147
Recognised
% 62.30 38.89 58.33
# 32 27 34
False
% 16.93 21.60 18.78
On average, 62.30% of the 252 craters with a
diameter larger than about 1.2 km (5 pixels) that are
visually recognizable on the 26 images were
correctly detected, a result that can be regarded as
very satisfactory, considering the differing
characteristics of the areas under study. This value is
on the same level of crater recognition which is
announced in other recent publications (Plesko et al.
(2004), Barata et al. (2004), Kim at al. (2004) and
Earl et al. (2005)). Our edge detector approach
obtains better results than the other two methods, not
only in what concerns crater recognition, but also as
regards the number of false positives. This is a
problem that plagues all the approaches to the issue
under consideration, and the results currently
presented can be considered as major improvements.
For the future we intend to fully automate the
proposed method of edge detection, by making the
choice of parameter λ independent from human
intervention. We believe that this goal can be
achieved through the use of some quality criteria,
namely the ones proposed by Levine and Nazif
(1985).
In what concerns the template matching phase,
which is out of the scope of this paper, the
corresponding methodology for crater recognition is
under development, and improvements are to be
expected. These should lead to higher precision in
crater recognition, as well as even smaller numbers
of false crater detections.
ACKNOWLEDGEMENTS
The results presented in this paper have been
developed in the frame of research project
PDCTE/CTA/49724/03.
ENHANCING IMPACT CRATER CONTOURS TO INCREASE RECOGNITION RATES
411

REFERENCES
Barata T., Alves E.I., Saraiva J., Pina P, 2004, Automatic
recognition of impact craters on the surface of Mars.
In: Campilho A., Kamel M. (eds.), Image Analysis and
Recognition, Lecture Notes in Computer Science –
LNCS 3212, Springer, Berlin, 489-496.
Brumby, S., Plesko, C., Asphaug, E., 2003, Evolving
Automated Feature Extraction Algorithms for
Planetary Science. In: Proc. ISPRS WG IV/9:
Extraterrestrial Mapping Workshop – Advances in
Planetary Mapping 2003, Houston, Texas, 2 pp.
Canny, J., 1986 A computational approach to edge
detection, IEEE Trans. on PAMI, 8(6): 679-698.
Costantini, M., Zavagli, M., Di Martino, M., Marchetti, P.,
Di Stadio, F., 2002, Crater Recognition. Proc.
IGARSS’2002 - International Geoscience & Remote
Sensing Symposium.
Earl, J., Chicarro A., Koeberl, Ch., Marchetti, P.G.,
Milnes, M., 2005, Automatic Recognition of Crater-
like Structures in Terrestrial and Planetary Images.
Lunar and Planetary Science XXXVI, abs #1319.
Flores-Méndez, A., 2003, Crater Marking and
Classification Using Computer Vision. In: Sanfeliu,
A., Ruiz-Shulcloper (eds.): Progress in Pattern
Recognition, Speech and Image Analysis, Lecture
Notes in Computer Science LNCS 2905, Springer,
Berlin, 79-86.
Hartmann, W., Neukum, G., 2001, Cratering Chronology
and the Evolution of Mars. Space Science Reviews,
96: 165-194.
Homma, K., Yamamoto, H., Isobe, T., Matsushima, K.,
Ohkubo, J., 1997, Parallel Processing for Crater
Recognition. Lunar and Planetary Science XXVIII,
abs #1073.
Honda, R., Azuma, R., 2000, Crater Extraction and
Classification System for Lunar Images. Mem. Fac.
Sci. Kochi Univ., 21: 13-22.
Kim, J., Muller, J-P., 2003, Impact Crater Detection on
Optical Images and DEMs. In: Proc. ISPRS WG IV/9:
Extraterrestrial Mapping Workshop – Advances in
Planetary Mapping 2003, Houston, Texas, 2 pp.
Kim, J.R., Muller, J.-P., Morley J.G., 2004, Quantitative
assessment of automated crater detection on Mars. In:
Proc. of ISPRS’2004, Istanbul, Turkey, 6 pp.
Leroy, B., Medioni, G., Johnson, E., Matthies, L., 2001,
Crater Detection for Autonomous Landing on
Asteroids. Image and Vision Computing, 19: 787-792.
Levine, M.D., Nazif, A.M., 1985, Dynamic measurement
of computer generated image segmentation. IEEE
Transactions on PAMI, 7(2): 155-164.
Magee, M., Chapman, C., Dellenback, S., Enke, B.,
Merline, W., Rigney, M., 2003, Automated
Identification of Martian Craters Using Image
Processing. Lunar and Planetary Science XXXIV, abs
#1756.
Marr, D., Hildreth, E., 1980, Theory of Edge Detection,
Proc. Royal Society of London, B207: 187-217.
Matsumoto, N., Asada, N., Demura, H., 2005, Automatic
Crater Recognition on Digital terrain Model. Lunar
and Planetary Science XXXVI, abs #1995.
Michael, G., 2003, Coordinate Registration by Automated
Crater Recognition. Planetary and Space Science, 51:
563-568.
Neukum, G., Jaumann, R., Hoffmann, H., Hauber, E.,
Head, J.W., Basilevsky, A.T., Ivanov, B.A., Werner
S.C., van Gasselt, S., Murray, J.B., McCord, T., 2004,
The HRSC Co-Investigator Team. Recent and episodic
volcanic and glacial activity on Mars revealed by the
High Resolution Stereo Camera. Nature, 432: 971-
979.
Plesko, C., Brumby, S., Asphaug, E., Chamberlain, D.,
Engel, T., 2004, Automatic Crater Counts on Mars.
Lunar and Planetary Science XXXV, abs #1935.
Prewitt, J.S.M., Mendelsohn, M.L., 1966, The analysis of
cell images, Ann. N.Y. Acad. Sci., 128: 1035-1053.
Roberts, L.G., 1965, Machine Perception of Three-
Dimensional Solids, Optical and Electro-Optical
Information Processing, MIT Press, 159-197.
Sobel, I.E., 1970, Camera models and machine perception,
PhD Thesis, Stanford University.
Vinogradova, T., Burl, M., Mjolness, E., 2002, Training of
a Crater Detection Algorithm for Mars Crater
Imagery. Proc. IEEE Aerospace Conference, Vol. 7:
3201-3211.
VISAPP 2006 - IMAGE ANALYSIS
412
