
NEIGHBORHOOD HYPERGRAPH PARTITIONING FOR IMAGE
SEGMENTATION
Soufiane Rital, Hocine Cherifi
Facult
´
e des Sciences Mirande, Universit
´
e de Bourgogne
9, Av. Alain Savary, BP 47870, 21078 Dijon, France.
Serge Miguet
LIRIS, Universit
´
e Lumi
`
ere Lyon 2
5, avenue Pierre Mend
`
es France, 69500 Bron, France.
Keywords:
Graph, Hypergraph, Neighborhood hypergraph, multilevel hypergraph partitioning, image segmentation, edge
detection.
Abstract:
The aim of this paper is to introduce a multilevel neighborhood hypergraph partitioning for image segmen-
tation. Our proposed approach uses the image neighborhood hypergraph model introduced in our last works
and the algorithm of multilevel hypergraph partitioning introduced by George Karypis. To evaluate the algo-
rithm performance, experiments were carried out on a group of gray scale images. The results show that the
proposed segmentation approach find the region properly from images as compared to image segmentation
algorithm using normalized cut criteria.
1 INTRODUCTION
Image segmentation, whose goal is the partition of
the image domain, is a long standing research subject
in computer vision (Pal and Pal, 1993). The result-
ing image subdomains, which can be denoted as im-
age segments, satisfy some condition of homogeneity,
e.g., present the same color or some kind of texture.
Image segmentation plays a principal role in the re-
alization of computer vision applications, as a previ-
ous stage for the recognition of different image ele-
ments or objects. Several algorithms have been intro-
duced to tackle this problem. It can be classified into
five approaches (Fan et al., 2001)(Navon et al., 2005),
namely: (a) Histogram-based methods, (b) boundary-
based methods, (c) region-based methods, (d) hybrid-
based methods, and (e) graph-based methods. In this
paper we briefly consider some of the related work
that is most relevant to our approach: graph based
methods.
There has been significant interest in graph-based
approaches to image segmentation in the past few
years (Wu and Leahy, 1993), (Sarkar and Boyer,
1996), (Gdalyahu et al., 2001), (Soundararajan and
Sarkar, 2001), (Shi and Malik, 2000), (Soundararajan
and Sarkar, 2003), (Wang and Siskind, 2003). The
common theme underlying these approaches is the
formulation of a weighted graph G =(X, e). The
elements in X are pixels and the weight of an edge
is some measure of the dissimilarity between the two
pixels connected by that edge (e.g., the difference in
intensity, color, motion, location or some other local
attribute). This graph is partitioned into components
in a way that minimizes some specified cost function
of the vertices in the components and/or the boundary
between those components.
Wu and Leahy (Wu and Leahy, 1993) were the first
to introduce the general approach of segmenting im-
ages by way of optimally partitioning an undirected
graph using a global cost function. They minimized
a cost function formulated as a boundary cost met-
ric, the sum of the edge weights along a cut bound-
ary: cut(A, B)=
i∈A,j∈B
w(i, j), and with the
obvious constraints A ∪ B = X, A ∩ B = ∅, and
A = ∅, B = ∅. This cost function has a bias toward
finding small components. Cox et al. (Cox et al.,
1996) attempted to alleviate this bias by normaliz-
ing the boundary-cost metric. They proposed a cost
function, ratio regions, formulated as a ratio between
a boundary-cost metric and a segmentation-area met-
ric. Shi and Malik (Shi and Malik, 2000) and Sarkar
and Soundararajan (Soundararajan and Sarkar, 2003)
adopted different cost functions, normalized cut and
average cut, formulated as sums of two ratios between
boundary-cost and segment-area-related metrics, also
in undirected graphs.
The cost function defined by Shi and Malik at-
tempts to rectify the tendency of the cut algorithm to
331
Rital S., Cherifi H. and Miguet S. (2006).
NEIGHBORHOOD HYPERGRAPH PARTITIONING FOR IMAGE SEGMENTATION.
In Proceedings of the First International Conference on Computer Vision Theory and Applications, pages 331-337
DOI: 10.5220/0001376003310337
Copyright
c
SciTePress

prefer isolated nodes of the graph. The Normalized
cut criterion consists of minimizing:
Ncut(A, B)=
cut(A, B)
Assoc(A, X)
+
cut(A, B)
Assoc(B,X)
(1)
where assoc(A, X)=
i∈A,j∈B
w(i, j) which intu-
itively represents the connection cost from the nodes
in the sub-graph A to all nodes in the graph X.
An alternative to the graph cut approach is to look
for cycles in a graph embedded in the image plane. In
this case, the cost function formulated as a ratio of two
different boundary-cost metrics in a directed graph.
This cost functions can alleviate area-related biases
in appropriate circumstances. In (Wang and Siskind,
2003), Wang and Siskind present a cost function, cut
ratio, namely, the ratio of the corresponding sums of
two different weights associated with edges along the
cut boundary in an undirected graph.
In most cases, we usually want to partition (seg-
ment) an image into a larger number of parts; i.e.,
we want a k-way partitioning algorithm which divides
our image into k parts. One way of partitioning a
graph into more than two components is to recursively
bipartition the graph until some termination criterion
is met. Often, the termination criterion is based on the
same cost function that is used for bipartitioning (Shi
and Malik, 2000),(Wu and Leahy, 1993),(Wang and
Siskind, 2003). The recursive k-way partitioning al-
gorithm is time consuming because we need to apply
the same algorithm at each new iteration of the hierar-
chy. Ideally, we would like to have a direct k-way al-
gorithm which outputs the k disjoint areas in a single
iteration (Hadley et al., 1992). A common solution is
to convert the partitioning problem into a clustering
problem. Shi and Malik (Shi and Malik, 2000) define
a new criterion that can be used in a k-way algorithm.
Ncut
k
(A
1
,A
2
,...,A
k
)=
cut(A
1
,X − A
1
)
Assoc(A
1
,X)
(2)
+
cut(A
2
,X − A
2
)
Assoc(A
2
,X)
+ ...+
cut(A
k
,X − A
k
)
Assoc(A
k
,X)
where A
i
is the ith sub-graph of G. Tal and Malik
(Tal and Malik, 2001) used the k-means algorithm
to find a pre-selected number of clusters within the
space spanned by the non-zero, smallest e eigenvec-
tors. For those cases where the number of clusters is
not known, the authors proposed using several values
of k and then selecting that k which minimized the
criterion:
Ncut
k
(A
1
,...,A
k
)/k
2
. (3)
In (Martinez et al., 2004), Aleix M. Martinez et al.
investigate in the other approaches to non-parametric
clustering in the eigenspace of the affinity matrix.
The authors use the method of Koontz and Fukunaga
(Koontz and Fukunaga, 1972) that has the advantage
of automatically determining the optimal value of k
as the data are grouped into clusters.
The main drawback of proximity graphs is their
use of binary neighborhood relations. An image is
an organization of objects in a space, and the appro-
priate relational algebra is not necessarily a binary
one. The corresponding representation for images
data with higher order relationship is a hypergraph.
By regarding each set as a generalized edge one ob-
tains a structure called a hypergraph (Fig. 1). Sim-
ilarly to graphs, hypergraphs can be used to repre-
sent the structure of many applications, such as data
dependencies in distributed databases (Koyutrk and
Aykanat, 2005), component connectivity in VLSI cir-
cuits (Karypis et al., 1999) and image analysis (Rital
et al., 2001) (Rital and Cherifi, 2004).
x4
Vertices
edges
x3
x2
x5
e1
e7
e5
e4
e3
e2
x6
x
1
Ex6
x
3
x2
x5
x6
x1
x4
(a) (b)
Figure 1: An example of (a) graph and (b) hypergraph.
Also, like graphs, hypergraphs may be partitioned
such that a cut metric is minimized. The most ex-
tensive and large scale use of hypergraph partition-
ing algorithms, however, occurs in the field of VLSI
design and synthesis. A typical application involves
the partitioning of large circuits into k equally sized
parts in a manner that minimizes the connectivity be-
tween the parts. The circuit elements are the vertices
of the hypergraph and the nets that connect these cir-
cuit elements are the hyperedges (Alpert and Kahng,
1995). The leading tools for partitioning these hy-
pergraphs are based on two phase multi-level ap-
proaches (Karypis et al., 1999). In the first phase,
they construct a hierarchy of hypergraphs by incre-
mentally collapsing the hyperedges of the original hy-
pergraph according to some measure of homogene-
ity. In the second phase, starting from a partition-
ing of the hypergraph at the coarsest level, the al-
gorithm works its way down the hierarchy and at
each stage the partitioning at the level above serves
as an initialization for a vertex swap based heuris-
tic that refines the partitioning greedily (Fiduccia and
Mattheyses, 1982),(Kernighan and Lin., 1970). The
development of these tools is almost entirely heuris-
tic and very little theoretical work exists that analyzes
their performance beyond empirical benchmarks. Hy-
pergraph cut metrics provide a more accurate model
VISAPP 2006 - IMAGE ANALYSIS
332

than graph partitioning in many cases of practical
interest. For example, in the row-wise decompo-
sition of a sparse matrix for parallel matrix-vector
multiplication, a hypergraph model provides an ex-
act measure of communication cost, whereas a graph
model can only provide an upper bound (Trifunovic
and Knottenbelt, 2004a) (Catalyurek and Aykanat.,
1999). It has been shown that, in general, there does
not exist a graph model that correctly represents the
cut properties of the corresponding hypergraph (Ih-
ler et al., 1993). Recently, several serial and parallel
hypergraph partitioning techniques have been exten-
sively studied (Sanchis, 1989) (Trifunovic and Knot-
tenbelt, 2004a)(Karypis, 2002) and tools support ex-
ists (e.g. hMETIS (Karypis and Kumar, 1998), PaToH
(Catalyurek and Aykanat., 1999) and Parkway (Tri-
funovic and Knottenbelt, 2004b)). These partitioning
techniques showed a very great efficiency in distrib-
uted databases and VLSI circuits fields.
In this paper, we widen the application area of hy-
pergraph partitioning algorithms to image fields and
more particularly to the image segmentation. The ba-
sic idea of this algorithm can be described as follows
and summarize in two steps:
1. It first builds a hypergraph of the image.
2. Then the algorithm partitions this representation
into a set of vertices, representing homogeneous re-
gions.
The aim of the first step is to capture all global
and local properties of the image data and the whole
key information for the segmentation purpose. This
model has proved to be extremely useful for solving
some applications in image processing fields such as
noise removal (Rital et al., 2001) and edge detection
(Rital and Cherifi, 2004). While the second step of
the proposed approach partition this representation to
a homogenous regions. It is done by a fast multilevel
programming algorithm. Throughout this paper, we
will denote the hypergraph of the image by the Image
Neighborhood Hypergraph INH.
In section 2, we briefly review some background on
hypergraph theory. The proposed segmentation ap-
proach is presented in Section 3 and its performance
is illustrated in Section 4. The paper ends with a con-
clusion in Section 5.
2 BACKGROUND
Our main interest in this paper is to use combinatorial
models. We will introduce basic tools that are needed.
A hypergraph H on a set X is a family (E
i
)
i∈I
of
non-empty subsets of X called hyperedges with:
i∈I
E
i
= X, I = {1, 2,...,n},n∈ N.
Given a graph G(X; e), the hypergraph having the
vertices of G as vertices and the neighborhood of
these vertices as hyperedges (including these vertices)
is called the neighborhood hypergraph of G. To each
graph we can associate a neighborhood hypergraph :
H
G
=(X, (E
x
= {x}∪Γ(x))) (4)
where Γ(x)={y ∈ X, (x, y) ∈ e}.
2.1 Multilevel Hypergraph
Partitioning
The goal of the k-way hypergraph partitioning prob-
lem is to partition the vertices of the hypergraph into
k disjoint subsets X
i
,(i =0,...,k − 1), such that
a certain objective functions defined over the hyper-
edges is optimized.
Let us note H(X, E) a hypergraph. We will as-
sume that each vertex and hyperedge has a weight
associated with it, and we will use w(x) to denote
the weight of a vertex x, and w(E) to denote the
weight of a hyperedge E. One of the most com-
monly used objective functions is to minimize the
hyperedge-cut of the partitioning; i.e., the sum of the
weights of the hyperedges that span multiple parti-
tions: cut{A, B} =
E
i
∈A,E
j
∈B
w(E
i
,E
j
),A,B
are two partitions. Another objective that is often used
is to minimize the sum of external degrees (SOED) of
all hyperedges that span multiple partitions (Karypis
et al., 1999).
The most commonly used approach for computing
a k-way partitioning is based on recursive bisection.
In this approach, the overall k-way partitioning is ob-
tained by initially bisecting the hypergraph to obtain a
two-way partitioning. Then, each of these parts is fur-
ther bisected to obtain a four-way partitioning, and so
on. The problem of computing an optimal bisection of
a hypergraph is at least NP-hard (Garey and Johnson,
1979); however, many heuristic algorithms have been
developed. The survey by Alpert and Kahng (Alpert
and Kahng, 1995) provides a detailed description and
comparison of various such schemes.
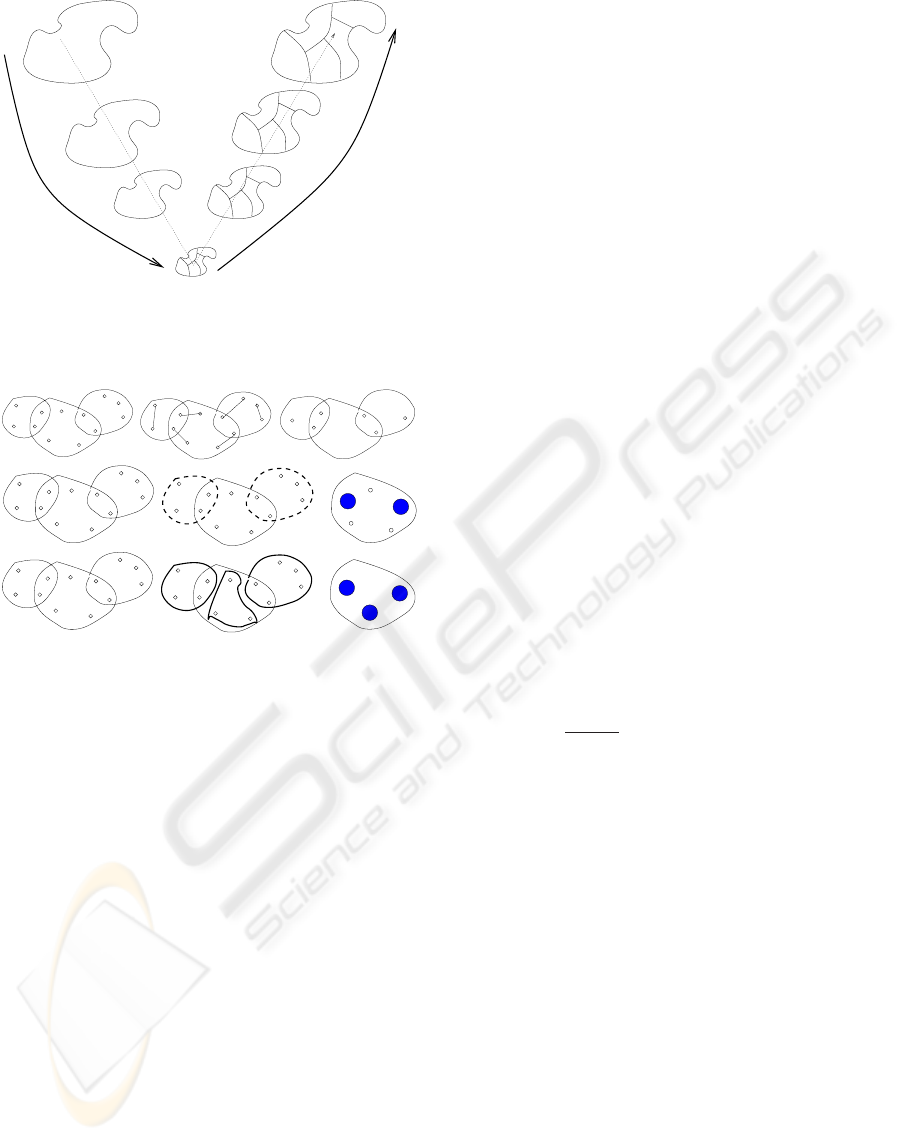
The key idea behind the multilevel approach for
hypergraph partitioning is fairly simple and straight-
forward. Multilevel partitioning algorithm, instead of
trying to compute the partitioning directly in the orig-
inal hypergraph, partition the hypergraph using three
process (Fig.2):
Coarsening phase: first obtain a sequence of suc-
cessive approximations of the original hypergraph.
Each one of these approximations represents a prob-
lem whose size is smaller than the size of the origi-
nal hypergraph. This process continues until a level
of approximation is reached in which the hypergraph
contains only a few tens of vertices (Fig. 3).
NEIGHBORHOOD HYPERGRAPH PARTITIONING FOR IMAGE SEGMENTATION
333
Coarsening Phase
H0
H1
H2
H3
H2
H1
H0
Initial Partitioning Phase
UnCoarsening Phase
Figure 2: Multilevel Hypergraph Partitioning.
a)
b)
c)
Figure 3: Some coarsening schemes: (a)Edge Coarsening,
(b) Hyperedge Coarsening, and (c) Modified Hyperedge
Coarsening.
Initial partitioning phase: At this point, these al-
gorithms compute a partitioning of that hypergraph.
Since the size of this hypergraph is quite small,
even simple algorithms such as Kernighan-Lin (KL)
(Kernighan and Lin., 1970) or Fiduccia-Mattheyses
(FM) (Fiduccia and Mattheyses, 1982) lead to reason-
ably good solutions. Uncoarsening phase: final step
of these algorithms is to take the partitioning com-
puted at the smallest hypergraph and use it to derive
a partitioning of the original hypergraph. This is usu-
ally done by propagating the solution through the suc-
cessive better approximations of the hypergraph and
using simple approaches to further refine the solution.
2.2 Image and Neighborhood
Relations
In this paper, the image will be represented by the
following mapping : I : X ⊆ Z
2
−→ C ⊆ Z
n
. Ver-
tices of X are called pixels, elements of C are called
colors. A distance d on X defines a grid (a connected,
regular graph , without both loop and multi-edge). Let
d
be a distance on C, we have a neighborhood rela-
tion on an image defined by :
∀x ∈ X, Γ
λ,β
(x)={x
∈ X, x
= x | (5)
d
(I(x),I(x
) ≤ λandd(x, x
) ≤ β)
The neighborhood of x on the grid will be denoted
by Γ
λ,β
(x). To each image we can associate a hyper-
graph called Image Neighborhood Hypergraph (INH)
(Rital and Cherifi, 2004):
H
Γ
λ,β
=(X, ({x}∪Γ
λ,β
(x))
x∈X
). (6)
On a grid Γ
β
, to each pixel x we can associate a neigh-
borhood Γ
λ,β
(x), according to a predicate λ. The
predicate λ may be completely arbitrary, it is useful
for a task domain. It may be defined on a set of points,
it may use colors, or some symbolic representation of
a set of colors, or it may be a combination of several
predicates, etc.
From H
Γ
λ,β
, we define a weighted image neighbor-
hood hypergraph (WINH) according to the two maps
functions f
w
v
and f
w
h
. The first map f
w
v
, associates
an integer weight w
xi
with every vertex x
i
∈ X. The
weight is defined by the color in each pixel. The map
function f
w
h
associates to each hyperedge a weight
w
hi
defined by the mean color in hyperedge. The
WINH is defined by :
H
Γ
λ,β
=(X, E
λ,β
,w
v
,w
h
), (7)
∀x ∈ X, f
w
v
(x)=I(x)
∀E(x) ∈ E
λ,β
,f
w
h
(E(x)) = (8)
1
|E(x)|
|E(x)|
i=1
I(x
i
)
x
i
∈E(x)
3 SEGMENTATION ALGORITHM
In this section, we describe a segmentation algorithm
based on image neighborhood hypergraph represen-
tation and multilevel hypergraph partitioning method.
It starts with a WINH generation followed by a mul-
tilevel hypergraph partitioning. The steps of the algo-
rithm are described below :
1. Input : Image, thresholds λ, β and µ (the number
of regions).
2. Weighted Image Neighborhood Hypergraph
(WINH) generation.
3. Multilevel weighted image neighborhood hyper-
graph partitioning
(a) the coarsening phase
(b) the initial partitioning
(c) the uncoarsening phase
4. Output : segmented Image.
VISAPP 2006 - IMAGE ANALYSIS
334

(a) (b)
(c)
Figure 4: The output of the proposed algorithm with WINH
(a) using weighted vertices only, (b) using weighted hyper-
edge only, (c) using weighted both vertices and hyperedges.
The parameters algorithm :β =1, λ =15and µ =51.
4 EXPERIMENTAL RESULTS
A group of a gray scale images with different ho-
mogenous areas were chosen in order to demonstrate
the performances of the proposed algorithm. First, we
build the WINH. The values of β, λ and µ are adjusted
in experiments. The values posted thereafter corre-
sponds to the best results. In the coarsening phase of
the second part of the proposed algorithm, we use the
hyperedge coarsening method (Fig. 3).
During the initial partitioning phase, a bisection
of the coarsened image neighborhood hypergraph is
computed. We use multiple random bisections, fol-
lowed by the Fiduccia-Mattheyses(FM) refinement
algorithm. In the last phase (uncoarsening), the par-
titioning is done by successively projecting the parti-
tioning to the next level finer WINH and using a par-
titioning refinement algorithm to reduce the cut and
thus to improve the quality of the partitioning. For
this phase, we use the refinement algorithm integrated
in HMETIS package (Karypis and Kumar, 1998).
We first evaluate the performance of the proposed
algorithm using WINH. In this experiment, we want
to know the best WINH representation allowing to
improve the next stage of algorithm (hypergraph
partitioning) and consequently the segmentation ap-
proach. We implement the algorithm with three types
of WINH : (1) using weighted vertices only, (2) us-
ing weighted hyperedges only and (3) using weighted
both vertices and hyperedges. Figure 4 shows the re-
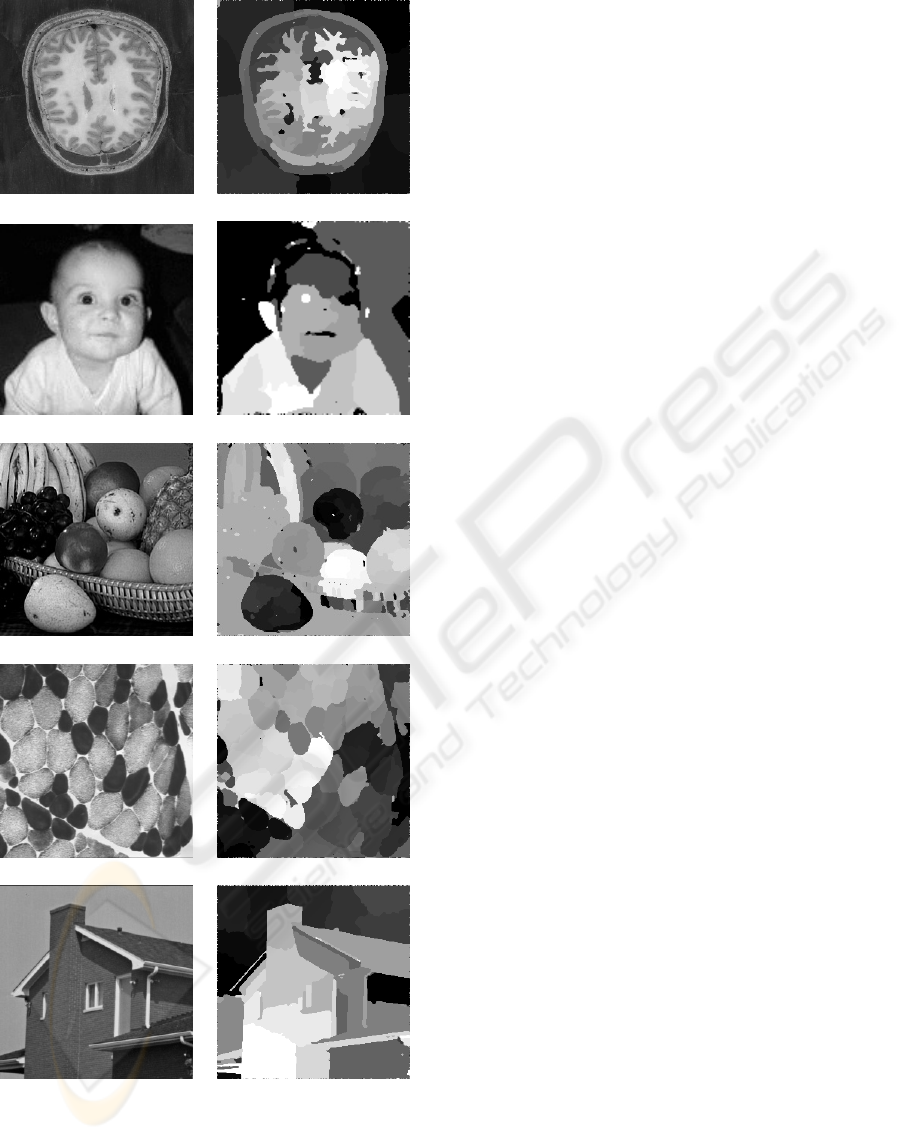
(a)
(b) µ =51, λ =15, β =1and computing time
= 32.23s
(c) µ =47and computing time = 402.75s
Figure 5: A comparison between the proposed algorithm
and normalized cut. (a) the original image. (b) the output
of the proposed algorithm. (c) the output of normalized cut
algorithm.
sults of the proposed algorithm using these three types
of WINH. We can see that the last representation
WINH (using both weighted vertices and weighted
hyperedges) gives significant results; especially in the
image areas containing many information. Indeed,
the third WINH gives more information about the im-
age to neighborhood hypergraph partitioning.
In order to compare our method with an existing
one, we have chosen the technique of Malik et al. (Shi
and Malik, 2000). We have processed a group of im-
ages with our segmentation method and compared the
results to normalized cuts. Normalized cuts used the
same parameters for all images, namely, the optimal
parameters given by authors.
Figure 5 shows a comparison between our algo-
rithm and normalized cut on Peppers image. Accord-
ing to the segmentation results on this image, we note
that the proposed algorithm localize better the areas of
NEIGHBORHOOD HYPERGRAPH PARTITIONING FOR IMAGE SEGMENTATION
335
(a) µ =35, λ =11, β =1
(b) µ =23, λ =15, β =1
(c) µ =45, λ =23, β =1
(d) µ =58, λ =21, β =1
(e) µ =27, λ =15, β =1
Figure 6: The outputs of the proposed algorithm on other
images. (a),(b),(c) and (d) the original images.
the treated image that the normalized cut algorithm.
Figure 6 shows the results of the proposed algorithm
on other images.
The strength of our algorithm is that it better de-
tects the regions containing many details. In addition,
our algorithm is powerful in computing times. It is
ten times inferior comparing to normalized cuts algo-
rithm.
5 CONCLUSIONS
We have presented a weighted image neighborhood
hypergraph partitioning for image segmentation. The
segmentation is accomplished in two stages. In the
first stage, weighted image neighborhood hypergraph
is generated. In the second stage, hypergraph parti-
tioning method using HMETIS package is computed.
Experimental results demonstrate that our approach
performs better than Normalized cut algorithm. Our
algorithm represents the first proposition for solving
the image segmentation problem. It can be improved
in several ways (parameters : the function maps, the
colorimetric threshold, the unsupervised region num-
ber, etc.).
REFERENCES
Alpert, C. J. and Kahng, A. B. (1995). Recent developments
in netlist partitioning: A survey. Integration: the VLSI
Journal, 19(1-2):1–81.
Catalyurek, U. and Aykanat., C. (1999). Hypergraph-
partitioning-based decomposition for parallel sparse-
matrix vector multiplication. IEEE Transactions on
Parallel and Distributed Systems, 10(7):673–693.
Cox, I., Rao, S., and Zhong, Y. (1996). Ratio regions: A
technique for image segmentation. In 13th Interna-
tional Conference on Pattern Recognition (ICPR’96).
Fan, J., Yau, D. K., Elmagarmid, A. K., and Aref, W. G.
(2001). Automatic image segmentation by integrating
color edge detection and seeded region growing. IEEE
Trans. on Image Processing., 10(10):1454–1466.
Fiduccia, C. M. and Mattheyses, R. M. (1982). A linear-
time heuristic for improving network partitions. In
Proceedings of the 19th ACM/IEEE Design Automa-
tion Conference DAC 82, pages 175–181.
Garey, M. and Johnson, D. (1979). Computers and
Intractability: A Guide to the Theory of NP-
Completeness. W.H. Freeman and Co.
Gdalyahu, Y., Weinshall, D., and Werman, M. (2001). Self-
organization in vision : stochastic clustering for image
segmentation, perceptual grouping, and image data-
base organization. IEEE Trans. Pattern Anal. Mach.
Intell., 23(10):1053–1074.
Hadley, S., Mark, B., and Vannelli, A. (1992). An ef-
ficient eigenvector approach for finding netlist parti-
tions. IEEE Trans. CAD, 11:885–892.
VISAPP 2006 - IMAGE ANALYSIS
336

Ihler, E., Wagner, D., and Wagner, F. (1993). Modeling hy-
pergraphs by graphs with the same mincut properties.
Inf. Process. Lett., 45(4):171–175.
Karypis, G. (2002). Multilevel hypergraph partitioning.
Technical report #02-25, University of Minnesota.
Karypis, G., Aggarwal, R., Kumar, V., and Shekhar, S.
(1999). Multilevel hypergraph partitioning: applica-
tions in vlsi domain. IEEE Trans. Very Large Scale
Integr. Syst., 7(1):69–79.
Karypis, G. and Kumar, V. (1998). hmetis 1.5: A hy-
pergraph partitioning package. Technical report,
University of Minnesota, Available onhttp://www-
users.cs.umn.edu/∼karypis/metis/hmetis/index.html.
Kernighan, B. W. and Lin., S. (1970). An efficient heuris-
tic procedure for partitioning graphs. The Bell system
technical journal, 49(1):291–307.
Koontz, W. and Fukunaga, K. (1972). A nonparametric
valley-seeking technique for cluster analysis. IEEE
Trans. Comput., 21:171–178.
Koyutrk, M. and Aykanat, C. (2005). Iterative-
improvement-based declustering heuristics for multi-
disk databases. Information Systems, 30(1):47–70.
Martinez, A. M., Mittrapiyanuruk, P., and Kak, A. C.
(2004). On combining graph-partitioning with non-
parametric clustering for image segmentation. Com-
puter Vision and Image Understanding, 95:72–85.
Navon, E., Miller, O., and Averbuch, A. (2005). Color im-
age segmentation based on adaptive local thresholds.
Image Vision Comput., 23(1):69–85.
Pal, N. and Pal, S. (1993). A review on image segmentation
techniques. Pattern Recognition, 26:1277–1294.
Rital, S., Bretto, A., Aboutajdine, D., and Cherifi, H.
(2001). Application of adaptive hypergraph model to
impulsive noise detection. Lecture Notes in Computer
Science, 2124:555–562.
Rital, S. and Cherifi, H. (2004). A combinatorial color
edge detector. Lecture Notes in Computer Science,
3212:289–297.
Sanchis, L. A. (1989). Multiple-way network partitioning.
IEEE Transactions on Computers, pages 62–81.
Sarkar, S. and Boyer, K. (1996). Quantitative measures
of change based on feature organization: eigenvalues
and eigenvectors. Proc. IEEE Conf. Comput. Vis. Patt.
Recogn., pages 478–483.
Shi, J. and Malik, J. (2000). Normalized cuts and image
segmentation. IEEE Transactions on Pattern Analysis
and Machine Intellignece, 22(8):888–905.
Soundararajan, P. and Sarkar, S. (2001). Analysis of min-
cut, average cut, and normalized cut measures. Proc.
Third Workshop Perceptual Organization in Computer
Vision.
Soundararajan, P. and Sarkar, S. (2003). An in-depth study
of graph partitioning measures for perceptual orga-
nization. IEEE Trans. Pattern Anal. Mach. Intell.,
25(6):642–660.
Tal, D. and Malik, J. (2001). Combining color, texture and
contour cues for image segmentation. Preprint.
Trifunovic, A. and Knottenbelt, W.(2004a). A parallel algo-
rithm for multilevel k-way hypergraph partitioning. In
Proceedings of 3rd International Symposium on Par-
allel and Distributed Computing.
Trifunovic, A. and Knottenbelt, W. (2004b). Parkway
2.0: A parallel multilevel hypergraph partitioning
tool. In Proceedings of 19th International Symposium
on Computer and Information Sciences (ISCIS 2004),
volume 3280, pages 789–800.
Wang, S. and Siskind, J. M. (2003). Image segmentation
with ratio cut - supplemental material. IEEE Trans.
Pattern Anal. Mach. Intell., 25(6):675–690.
Wu, Z. and Leahy, R. (1993). An optimal graph theoretical
approach to data clustering: theory and its application
to image segmentation. IEEE Trans. Patt. Anal. Mach.
Intell., 15:1101–1113.
NEIGHBORHOOD HYPERGRAPH PARTITIONING FOR IMAGE SEGMENTATION
337
