
DIRECTION BIASED SEARCH ALGORITHMS FOR FAST
BLOCK MOTION ESTIMATION
Niranjan Mulay
Sasken Communication Technologies Ltd, Products Division, India
Keywords: Video compression, fast motion estimation, block matching, direction biased search patterns.
Abstract: Motion estimation (ME) is computationally the most challenging part of the video encoding process. It has a
direct impact on speed and qualitative performance of the encoder. Consequently, many sub-optimal but
faster ME algorithms have been developed till date. In particular, the Three Step Search (TSS) and Four
Step Search (FSS) algorithms have become popular because of their ease of implementation. The TSS
algorithm is a uniformly spaced block matching algorithm, which performs better in case of large motion.
On the other hand, the New Three Step Search (NTSS) and FSS are center-biased algorithms that
outperform TSS in case of smooth correlated motion. Later, another center-biased search technique namely,
the Diamond Search (DS) algorithm was introduced which was proved to deliver a faster convergence than
FSS in case of smooth motion scenarios. However, the performance of the center-biased algorithms
degrades in sequences having consistently large or uncorrelated motion as they become susceptible to
getting trapped in local minima near the center. In this paper, two novel ME algorithms, namely, dual square
search (DSS) and dual diamond search (DDS) are proposed in order to strike a balance between the center-
biased and uniformly spaced search techniques. The proposed algorithms suggest that a decision to shift the
search center should be delayed till the candidates on a coarse as well as fine grid are evaluated. Moreover,
these algorithms are modeled to exploit motion vector distribution found in most of the real world video
sequences by giving more precedence to candidates near the center, followed by the candidates in the
horizontal and vertical directions than those in the diagonal direction. The performance of the proposed
algorithms is compared with TSS and FSS algorithms in terms of computational speed, motion
compensation error and the compression achieved for various kinds of video sequences. The tested
sequences show that both these algorithms can be substantially faster than TSS and FSS. The proposed ME
algorithms promise to achieve a balanced tradeoff amongst ‘speed - bit rate - quality’ for different kinds of
motion sequences.
1 INTRODUCTION
The main objective of the Motion Estimation (ME)
module is to exploit the temporal redundancy
between successive frames of a video sequence in
order to reduce the number of bits required for
coding. In this paper, we focus on the block
matching ME algorithms. In these block based
coding schemes, the moving regions across the
frames are analyzed by subdividing the frames into
smaller units called blocks. The video standards
such as H.26x and MPEG series (H263, 1998;
MPEG4, 1999) specify block based coding
techniques. The block based ME algorithms try to
find the best matching block, the one giving the least
Block Distortion Measure (BDM), in the reference
frame for every block in the current frame. The idea
is to encode the error data between the current block
and the best matching block along with its
displacement. The displacement is known as the
motion vector (MV). The range of motion vectors is
generally restricted to the certain region specified by
the standard. This region is also known as search
window. Most of the fast ME algorithms work under
the assumption that the error surface is monotonic.
The term error surface indicates a surface defined by
the block distortion measured between the current
block and every candidate block in the search
window of a reference frame. The error surface is
monotonic if there is a distinct trough at the global
minimum and it increases monotonically as the
checking point moves away from the global
140
Mulay N. (2006).
DIRECTION BIASED SEARCH ALGORITHMS FOR FAST BLOCK MOTION ESTIMATION.
In Proceedings of the International Conference on Signal Processing and Multimedia Applications, pages 140-148
DOI: 10.5220/0001570201400148
Copyright
c
SciTePress
minimum. But for most of the real video
applications or fast motion sequences, the error
surface may not be always monotonic. Instead there
could be multiple local minima in the search area.
However, the assumption of monotonic surface
facilitates the development of search patterns and
hence most of the fast ME algorithms are developed
under this assumption. The FS algorithm does an
exhaustive search and evaluates each and every
candidate in the search window to reach at the
candidate with minimum BDM that may be called as
the global minimum for that current block.
Let [-W, +W] be the maximum range allowed for
motion vectors in horizontal and vertical direction
[i.e. search window size = (2W+1)]. We have done
the comparative analysis for some of the popular
ME algorithms for W = 7, i.e. for search area of 15 x
15 pixels around the center. The FS algorithm does
an exhaustive search demanding (2W+1)
2
= 225
BDM computations per block. Hence, various sub-
optimal and fast ME algorithms are developed in an
attempt to devise a mechanism of choosing the
suitable subset of these 225 candidates. The TSS
algorithm starts with the 8 search points at large step
size, typically half the search range. At every stage,
the search center is moved to the best match in the
previous step and the stepsize is reduced by half.
Therefore, TSS always demands fixed 25 search
points to trace any point within W = 7 window. For
most of the real world video sequences, the motion
vector distribution is observed to be prominently
biased towards the zero motion. The various center-
biased algorithms such as NTSS (Zeng et al., 1994,
pp.438-442), FSS (Po and Ma, 1996, pp.313-317)
and DS (Tham et al., 1996, pp.369-377) were
developed to exploit this fact in order to efficiently
detect small motions appearing in stationary or
quasi-stationary (within a region of +/- 2 pixels)
blocks. As compared to TSS, the NTSS algorithm
ensures the fast detection of quasi-stationary blocks
by using a half way stop technique. However, NTSS
demands worst case 33 search points for large
motion blocks, 8 more than TSS. The FSS algorithm
is a center-biased algorithm as it typically starts on a
fine grid of step size 2. The center-biased strategy of
FSS makes it far more efficient than NTSS while
providing the same quality as that of NTSS. Later,
another center-biased algorithm, namely, the
diamond search [DS] was proposed to speed up the
motion estimation of stationary and quasi-stationary
blocks. Even though, both the algorithms - FSS and
DS, perform their best for slow motion sequences,
DS is proved to be faster in terms of required
number of search points. However, the work done
by Tham et al. (1996) mentions that FSS can be
more efficient than DS beyond +/- 3 region.
Moreover, this best-case analysis assumes that the
error surface is monotonic. But in practice, FSS and
DS might take larger number of block comparisons
than the best possible theoretical numbers. In
general, it is observed that the performance of
center-biased algorithms degrades as compared to
that of TSS if the majority of motion vectors lie
beyond +/- 3 region. With these observations
mentioned here and with the due consideration to the
space constraints, we have limited the comparison of
the proposed algorithms in our simulation
experiments to TSS and FSS algorithms.
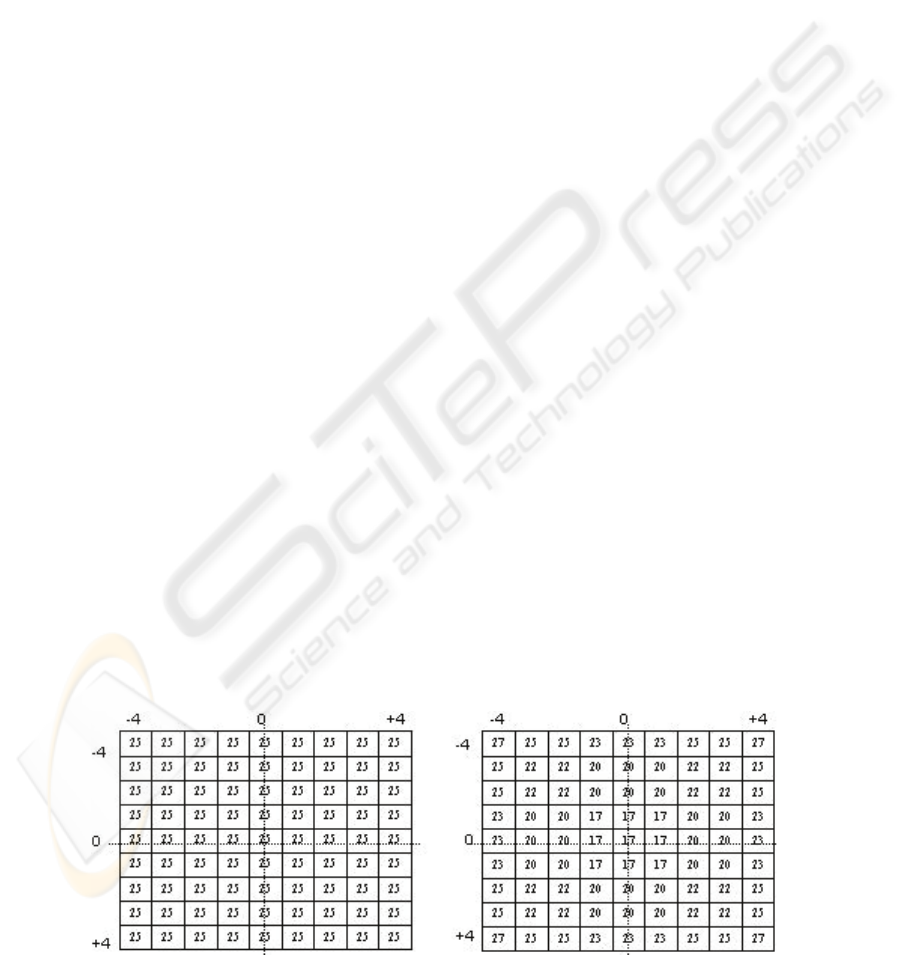
The figure 1 illustrates the best-case number of
search points required to be evaluated for TSS and
FSS algorithms in order to converge at a particular
location. The comparative numbers are shown only
for the motion vectors restricted within a region of
+/- 4 pixels around the center [i.e. |MV| <= 4
region]. As mentioned earlier, for the given window
size W = 7, TSS always requires fixed 25 number of
search points to trace any location. In case of FSS,
the number of search points required to reach at a
particular location varies with its distance from the
center. Compared to TSS, FSS is faster for near
center locations, but the number of block
comparisons required increases with the increase in
(a) TSS (b) FSS
Figure 1: Best-case analysis for TSS and FSS.
DIRECTION BIASED SEARCH ALGORITHMS FOR FAST BLOCK MOTION ESTIMATION
141
distance from the center. It can be perceived that
within |MV| <= 4 region, FSS outperforms TSS but
beyond that, TSS is the clear winner.
The best-case analysis of the above-mentioned
popular algorithms helps to evaluate the
performance of the proposed algorithms. This paper
is organized as follows. In section 2 of the paper,
two ME algorithms are proposed and their
performance is theoretically analyzed in terms of
computational requirement. The section 3 presents
the simulation results in order to evaluate the
performance of the proposed ME algorithms in
comparison with TSS and FSS. The conclusions are
drawn in section 4.
2 ME ALGORITHMS
As discussed earlier, the TSS is a coarse to fine
search algorithm that performs better in cases where
the best match is located far from the center whereas
FSS and DS are center-biased search algorithms
which yields faster convergence when the best
match
is located near the center of the search. For
the sequences having consistent large or
uncorrelated motion, the center-biased algorithms
might maintain faster convergence than TSS but
they seem to get trapped in nearby local minima,
thereby giving a high speed but poor compression,
affecting the quality (Alkanhal et al., 1999).
The interesting observation in TSS, FSS and DS
algorithms is that the center is immediately moved
after all the candidates at the same step size (might
be coarse or fine)
gets evaluated in stage1. This is
critical to these algorithms as they can get trapped in
local minima (Turaga and Chen, 2001). To minimize
this intricacy, the proposed algorithms suggest that a
decision to shift the search center should be delayed
till the candidates on a coarse as well as fine grid are
evaluated. This makes the proposed algorithms more
robust giving a better starting point for the
succeeding stage and hence promises to enhance the
chances of reaching global minima quickly. The
work presented by Cheung and Po (2002, pp.1168-
1177) mentions that the majority percentage of
motion vectors are typically enclosed within the
central 5x5 area, i.e. a region of +/-2 pixels around
the zero motion position. Also it is known that even
though the block displacement of real world video
sequences can be in any direction, the motion is
predominant in the horizontal or vertical direction.
The algorithms proposed in this section exploit these
two facts giving less priority to candidates in a
diagonal direction. The proposed algorithms can
trace the maximum motion displacement of +/- 7
pixels (i.e. W=7).
2.1 Algorithm I: Dual Square
Search
As the probability of finding the best match within
an area of +/-2 pixels around the zero motion vector
is very high, the number of search points required to
converge at these points becomes an important issue.
Hence, the proposed algorithm aims to maintain the
advantage of the center-biased algorithms by
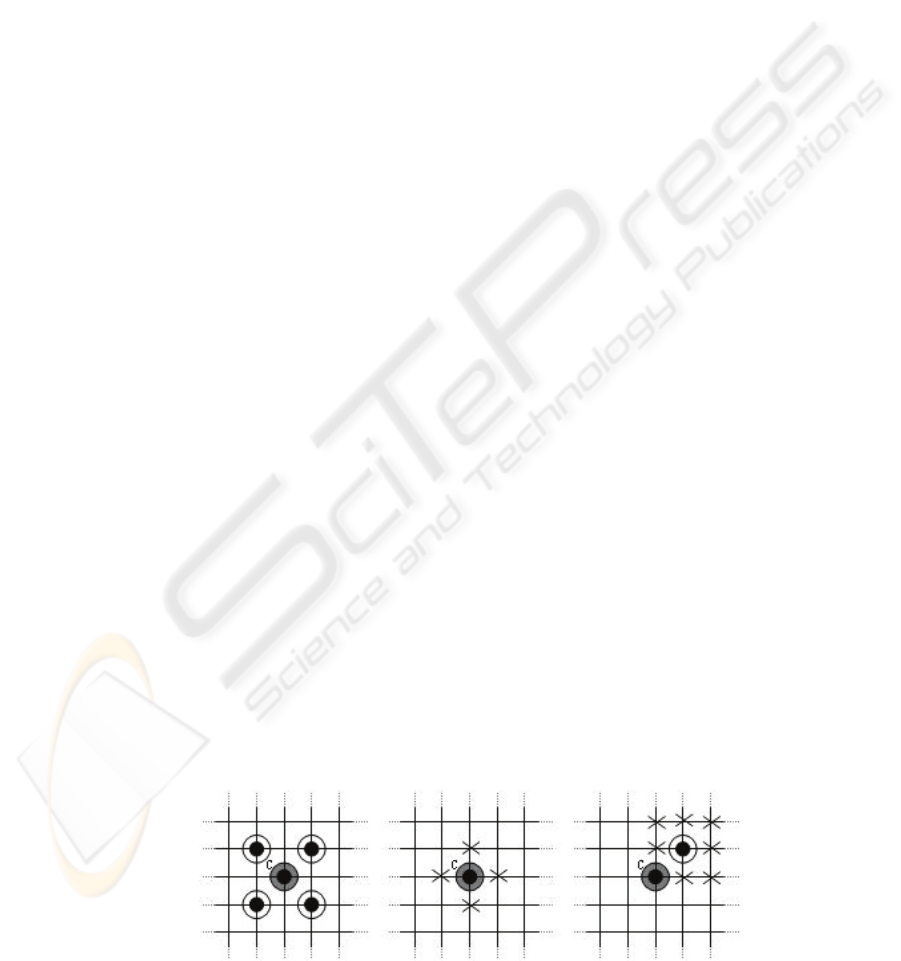
ensuring fast convergence within this area. The basic
square search configuration used in dual square
search (DSS) algorithm is indicated in figure 2. This
configuration is used to localize the search within
5x5 window (or +/2 region) of the selected center.
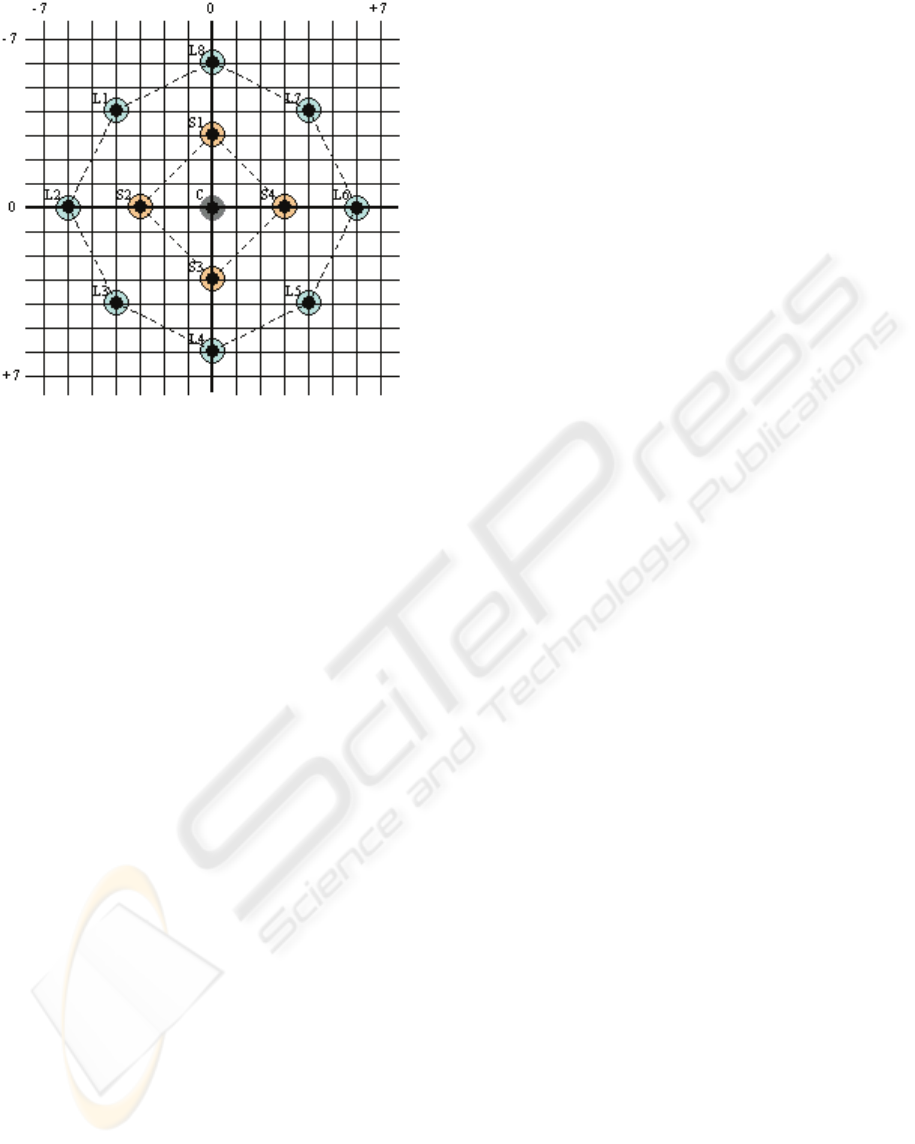
Let, ‘C’ be the block in a current frame whose
best match is to be found in the reference frame. The
figure 3 indicates the candidates from a reference
frame chosen for searching the best match. The
algorithm involves two square shaped patterns, a
short square at step size 1 and a long square at step
size 5. The algorithm starts with BDM calculation of
5 candidates in step 1 using basic square search
configuration at the center. If the minimum BDM
point is found at the center, only 4 additional block
comparisons are needed to stop the search. If the
minimum BDM point is found on the short square
then the center is not immediately moved to this
point. The key is to evaluate 4 candidates on a
distant grid, 2 in horizontal direction and 2 in
( a ) b ) ( c )
Figure 2: (a) Basic square search configuration. (b) Next step if center is the best match. (c) Next step if the candidate of a
square is the best match.
SIGMAP 2006 - INTERNATIONAL CONFERENCE ON SIGNAL PROCESSING AND MULTIMEDIA
APPLICATIONS
142

L: Long Square S: Short Square
Figure 3: Dual Square Search.
vertical direction and only then take a decision to
move the center of the search in a direction of the
best match. This is the center corrective step to make
the algorithm more robust minimizing the chances of
being trapped in local minima. The further
convergence path will be clearer with the following
explanatory steps.
Step 1: Use basic square search to evaluate 4
candidates of a short square along with the co-
located block. If the center C is the point of
minimum BDM, evaluate just 4 candidates on a ‘+’
sign of stepsize 1 and the best match amongst these
candidates will be the final integer motion vector.
Step 2: If the best match in step 1 is found at the
short square candidate, evaluate L2, L4, L6 and L8
as a center corrective measure. Even after these
comparisons, the short square candidate is proved to
be the minimum BDM point then move the center to
this point for the next stage and calculate the block
distortion for the 7 valid points of a square of
stepsize one around this newly shifted center to find
the final best match candidate.
Step 3: If step 2 delivers minimum BDM at one of
the long square candidates (amongst L2, L4, L6,
L8), then evaluate two points in a diagonal direction
lying in the relevant zone of the motion field. For
e.g. if step 2 yields L2 as the best match, then
evaluate L1, L3 and only then take a decision to shift
the search center. Once the center is shifted to the
minimum BDM point, the final best match is found
out by doing a basic square search at that point.
From the algorithm, it can be perceived that the
search technique uses two-tier strategy each time
before shifting the center. It tries to exploit the
features of both, the center-biased and non center-
biased search algorithms.
Computational Complexity:
With the DSS algorithm, any candidate within 15 x
15 window is traceable. The total number of search
points is varied from (5 + 4) = 9 in the best-case to
(5+4+2+4+7) = 22 in the worst case. The figure 4
depicts the number of search points required to reach
a particular location within |MV| <= 4 area.
Figure: 4 Best-case analysis for DSS.
It can be clearly seen that the algorithm promises
faster convergence than TSS and FSS to converge at
any point within W=7 region. The ability to detect
stationary and quasi-stationary blocks with just 9 or
16 search points and to detect large motion blocks
with maximum of 22 search points makes DSS a far
more efficient algorithm than the previous search
techniques.
2.2 Algorithm II: Dual Diamond
Search
As mentioned earlier, the motion in real video
scenarios is predominant in the vertical and
horizontal directions. The fact that the motion in the
diagonal direction is very rare is evident by the
‘probability matrix of MV distribution’ presented in
the work of Cheung and Po (2002). This fact has
inspired the direction biased – dual diamond search
(DDS) algorithm to achieve faster convergence
along the horizontal and vertical directions at the
expense of higher computational cost to converge in
the diagonal direction. The search pattern of the
proposed algorithm involves a combination of both
the techniques, center-biased as well as uniformly
spaced search technique. The algorithm still
maintains the two-tier strategy to evaluate
candidates on finer as well as coarser grid before
shifting the search center.
DIRECTION BIASED SEARCH ALGORITHMS FOR FAST BLOCK MOTION ESTIMATION
143
S : Short Diamond L : Long Diamond
Figure 5: Dual Diamond Search.
The search pattern used in the DDS algorithm
involves two shapes: small diamond shaped pattern
and long diamond shaped pattern. In true sense, the
outer shape is octagonal, but it will be referred as a
long diamond in this text. In the very first step, the
DDS algorithm evaluates 4 candidates of a short
diamond at stepsize 3 along with the co-located
block. If the center C is the best match, evaluate 8
candidates of a square of stepsize 1 around the
center. The minimum BDM point will indicate the
final integer MV. Let this process of evaluating 8
candidates of a square of stepsize 1 around the
selected center be designated as ‘short square
search’. If step 1 yields the best match on the short
diamond then take a center corrective step like in
DSS to evaluate 4 candidates on a distant grid,
namely, L2, L6 in the horizontal direction and L4,
L8 in the vertical direction. If a short diamond point
still holds to be the point of minimum BDM, move
the search center at this point and do a short square
search to find the final best match. Otherwise if the
minimum BDM point is found on the long diamond
then evaluate the two diagonal candidates in the
probable zone of the motion field. If the best match
is amongst L2, L4, L6 and L8 then the final best
candidate is traced by a short square search
technique at that point. In case of the minimum
BDM point being found in a diagonal direction, a
technique similar to TSS is employed to search the
best matching candidate. The DDS algorithm is
summarized as follows.
Step 1: Compute block distortion for co-located
block and 4 candidates of a short diamond. If the
center C is the point of minimum BDM, apply short
square search technique at the center to find the final
integer motion vector.
Step 2: If the best match in step 1 is amongst the
short diamond candidates, evaluate L2, L4, L6 and
L8 as a center corrective measure. After these
comparisons, if the short diamond candidate is
proved to be the point of minimum BDM then the
decision to move the search center to this point is
taken. This shift of a search center is then followed
by a short square search to find the final best match
candidate.
Step 3: If step 2 delivers minimum BDM at one of
the long diamond candidates (amongst L2, L4, L6,
L8), then evaluate two points in a diagonal direction
lying in the relevant zone of a motion field. For e.g.
if step 2 yields L8 as the best match, then evaluate
L1, L7 and only then take a decision to shift the
search center. After evaluation of two relevant
diagonal candidates, if minimum BDM point is still
found at the previously shortlisted horizontal/vertical
candidate then the center of the search is shifted to
this point. The final best match is found out by doing
a short square search at that point.
Step 4: If the diagonal candidate proves to be the
best match in step 3 then the center is moved to this
point and a search pattern similar to TSS is
employed to finalize the integer MV. Here, 8
candidates at a stepsize of 2 from the center are
evaluated and in the next step, center is moved to the
minimum BDM point and step size is halved to 1. In
the last step, 8 candidates around this new center are
evaluated to deliver the final MV location.
From the above explanations, it is apparent that
the algorithm is well modeled to exploit the
probability distribution of motion vectors. The
details about the probability distribution of motion
vectors can be found in the work of Cheung and Po
(2002). The DDS algorithm is direction biased as it
gives the highest preference to the candidates near
zero motion location followed by the candidates in
the horizontal and vertical directions. The algorithm
takes longer time to converge in a diagonal
direction, as the motion in this direction is rare in
practical scenarios. Like DSS, the DDS algorithm
attempts to combine the features of both the center-
biased and uniformly spaced search strategies. The
center corrective approach in DDS helps to maintain
the robustness by minimizing the chances of getting
seized in the local minima. Unlike DSS, DDS speeds
up the motion estimation of blocks moving largely
in the horizontal and vertical directions. This might
be crucial for the CIF sequences compared to QCIF
sequences as the CIF sequences typically manifests
larger motion due to scale up effect.
SIGMAP 2006 - INTERNATIONAL CONFERENCE ON SIGNAL PROCESSING AND MULTIMEDIA
APPLICATIONS
144

Computational Complexity:
The DDS algorithm can trace any candidate within
15x15 search window. The total number of search
points in the best-case are (5 + 8) = 13. The DDS
algorithm exhibits a noticeable faster convergence
along the horizontal and vertical directions by
demanding maximum of 17 BDM computations for
|MV| <= 4 and 19 BDM computations for |MV| > 4.
However, if the best match lies in a diagonal
direction then the algorithm
demands worst case 27
search points, two more than TSS. The fig. 6 depicts
the number of search points required to reach a
particular location within |MV| <= 4 area.
Figure 6: Best-case analysis for DDS.
The analysis shown in fig. 6 indicates that the
DDS algorithm exploits the MV distribution found
in the real world sequences. For the blocks having
motion within +/- 1 region, the DDS algorithm
performance is better than that of TSS, NTSS, FSS
and more or less the same (if not better) as that of
DS. The point to be noted is that any candidate in
horizontal and vertical direction beyond +/- 1 region
can be traced with just 17 or 19 BDM computations.
The algorithm is more efficient than other
algorithms in case the best match consistently lies in
near center region or in the horizontal/vertical
direction. Nevertheless, the 27 BDM computations
required to reach a location in the diagonal direction
seems like an expensive penalty. But given the fact
that it is very unlikely to find consistent motion in a
diagonal direction for real world scenarios, the DDS
algorithm maintains its performance across various
kinds of motion sequences.
3 EXPERIMENTAL RESULTS
We have summarized the results of our simulation
experiments in this section. The algorithms have
been analyzed in MPEG4 framework for a large
number of QCIF/CIF test sequences. However, with
due regards to the space limitations, the results are
tabulated only for five CIF sequences representing
different types of motion content. These are the
YUV420 sequences captured at 15 fps. The
algorithms have been analyzed for the block size, N
= 16 and search window, W = 7. The error measure
namely, ‘Sum of absolute difference’ (SAD) is used
as a BDM for a block matching criterion. For block
size = N, One SAD computation demands [2N
2
Load, N
2
Sub, N
2
Abs, (N
2
- 1) Add] operations. The
tools like - unrestricted motion vectors and
macroblock skipping are disabled.
The performance is analyzed based on the
following three parameters:
1. Speed: Average number of search points per
block.
2. Quality: The quality of the motion estimation is
analyzed in terms of mean square error (MSE)
between the original frames and the motion
estimated frames.
3. Compression: The number of bits required to
code a particular sequence conveys practically
the most significant information. This is
analyzed in terms of the average number of bits
required per block. The rate control module is
disabled, rather kept as VBR (variable bit-rate)
in order to see the direct impact of motion
estimation algorithms on the size of the bit
streams.
From the table 1, it can be seen that for the low
motion sequences like Akiyo and Hall, all the
algorithms perform equally good in terms of quality
and compression. However, in terms of speed, DSS
clearly out-shadows the other algorithms, as it
demands nearly half the BDM computations as
compared to that of FSS. For the selected sequences,
FSS is observed to be always faster than the TSS
algorithm. However, when compared for the
sequences with greater motion content like
coastguard, foreman, and football the FSS fails to
find good matches and thereby it shows degradation
in terms of MSE and the number of bits needed. For
these fast motion sequences, the DSS algorithm
maintains its significant speed efficiency at the cost
of some more quality degradation compared to that
of FSS. This is where the DDS algorithm
outperforms the other algorithms by exhibiting a
good ‘speed-quality’ tradeoff. Compared to DSS, the
DDS algorithm takes slightly more number of search
points, still less than FSS and tries to achieve the
qualitative solution as close as that of TSS. Most of
the center-biased algorithms show considerable
degradation in their performance for large motion
sequences. Our simulation results show that, DDS
can offer a better solution to counteract this problem
common to most of the center-biased algorithms.
DIRECTION BIASED SEARCH ALGORITHMS FOR FAST BLOCK MOTION ESTIMATION
145
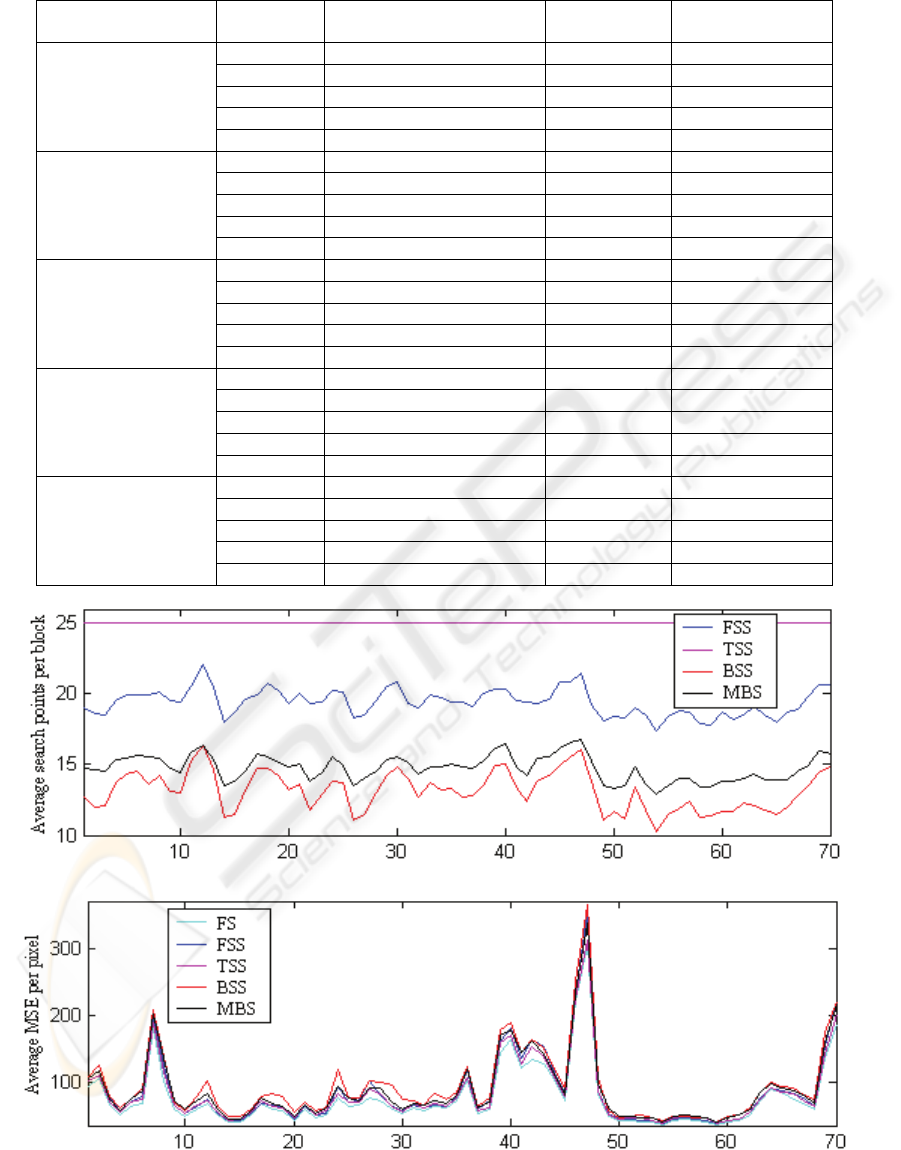
Table 1: Performance Analysis for CIF Test cases.
Test
Sequence
Algorithm Avg. no. of search points
per block.
Average MSE Average number
of bits per block
FS 225 19.64 14.547
TSS 25 19.92 14.485
FSS 15.86 19.9 14.458
DSS 8.51 20.11 14.413
Akiyo
[Slow motion]
DDS 12.22 20.03 14.512
FS 225 42.69 36.495
TSS 25 43.36 35.151
FSS 16.02 44.09 35.062
DSS 8.68 45.33 35.000
Hall
[Moderate &
correlated motion]
DDS 12.39 43.84 35.268
FS 225 129.95 154.738
TSS 25 138.68 160.515
FSS 18.94 148.95 166.596
DSS 11.2 163.92 186.681
Coastguard
[Large &
correlated motion]
DDS 14.98 138.07 160.105
FS 225 222.05 123.412
TSS 25 230.94 126.467
FSS 19.53 243.08 129.055
DSS 13.72 252.43 131.806
Foreman
[Moderate &
uncorrelated motion]
DDS 15.39 240.88 127.503
FS 225 335.67 209.184
TSS 25 353.58 216.811
FSS 20.76 385.58 229.513
DSS 15.36 393.5 231.831
Football
[Fast Motion]
DDS 17.15 377.7 220.6
Frame Number
(a)
Frame Number
(b)
Figure 7: Comparison of TSS, FSS, DSS and DDS in terms of average search points and MSE for the foreman sequence.
SIGMAP 2006 - INTERNATIONAL CONFERENCE ON SIGNAL PROCESSING AND MULTIMEDIA
APPLICATIONS
146

It can be seen that, especially for the fast motion
sequences, the performance of DDS algorithm is
better than FSS with regards to all the three
parameters - speed, quality and compression.
The figure 7 shows the performance of each of
the search techniques for the foreman sequence on a
frame-by-frame basis. The foreman sequence is
selected because it has some fast, uncorrelated
motion and it doesn’t favor center-biased or non-
center-biased search pattern in particular. It can be
seen that the DSS algorithm substantially improves
the speed efficiency at the cost of marginal increase
in the distortion. Thus, the DSS can be justified as
the natural choice for many time critical
applications. Otherwise, DDS gives an option of
trading off some speed compared to DSS for the
improvement in quality.
4 CONCLUSIONS
The two sub-optimal block matching algorithms,
namely, Dual Square Search (DSS) and Dual
Diamond Search (DDS) are proposed in this paper.
The number of search points required to trace a
particular position varies depending on the direction
of the position with respect to the center. The
algorithms give the highest preference to the
candidates near the center and the least preference to
the candidates in the diagonal direction. Both the
algorithms are based on the principle that the
candidates on a finer grid and those on a coarser grid
should be evaluated before taking a decision to
move the search center. This center corrective
approach makes these algorithms more robust
minimizing the chances of getting trapped in local
minima. The DDS algorithm goes one step further to
model its search strategy in order to exploit the MV
distribution of most of the real world video
sequences. With regards to the computational speed,
both the proposed algorithms, DSS and DDS clearly
outperform TSS and FSS algorithms. For large or
uncorrelated motion sequences, DSS may suffer
from more degradation in terms of quality.
Nevertheless, DSS enjoys the privilege of being the
fastest algorithm amongst these algorithms. Between
the two proposed algorithms, DSS is more effective
than DDS algorithm for smooth and small motion
sequences thereby promising to work at its best in
videoconference kind of applications. Moreover, the
DSS algorithm possesses the features like regularity
and simplicity that might be helpful for hardware
implementations. However, DDS is the one that
combines the efficient center-biased nature of FSS
with the advantage of TSS to find good matches for
large motion sequences. Compared to DSS, the DDS
algorithm has an ability to tradeoff some speed in
order to maintain its performance in terms of quality
and compression regardless of the motion content.
Clearly, the proposed algorithms try to blend the
best features of the center-biased and uniform search
strategies so as to provide good performance in
terms of ‘speed-quality-bit rate tradeoff’ when
considered across different kinds of motion
sequences including panning, zooming, smooth,
correlated, uncorrelated and fast motions.
REFERENCES
ITU-T Recommendation H.263, 1998. ‘Video coding for
low bit rate communication’.
ISO/IEC 14496-2 (MPEG4 visual), 1999. ‘Information
technology – Coding of audio-visual objects - Part
2:Visual’.
Turaga, D. and Chen, T. 2001. ‘Estimation and mode
decision for spatially correlated motion sequences’,
Technical Report AMP 01-01, Electrical and
Computer Engineering, Carnegie Mellon University,
Pittsburgh.
Rao, A. and Raghavan, M. 2003. ‘Fast motion estimation
algorithms computation and performance trade-offs’.
Zeng, B., Liou, M. and Li, R. 1994. ‘A new three step
search algorithm for block motion estimation’, IEEE
Trans. Circuits Syst. Video Technol., vol. 4, pp. 438-
442.
Po, L. and Ma, W. 1996. ‘A novel four step search
algorithm for fast block motion estimation’, IEEE
Trans. Circuits Syst. Video Technol., vol. 6, pp. 313-
317.
Tham, J. et al. 1996. ‘A novel unrestricted center-biased
search algorithm for four step search algorithm for fast
block motion estimation’, IEEE Trans. Circuits Syst.
Video Technol., vol. 8 (no. 4), pp. 369-377.
Alkanhal, M., Turaga, D. and Chen, T. 1999, ‘Correlation
based search algorithm for motion estimation’.
Cheung, C. and Po, L. 2002. ‘A novel cross diamond
search algorithm for fast block matching motion
estimation’, IEEE Trans. Circuits Syst. Video
Technol., vol. 12 (no. 12), pp. 1168-1177, Dec 2002.
DIRECTION BIASED SEARCH ALGORITHMS FOR FAST BLOCK MOTION ESTIMATION
147
