
LOGICRUNCHER
A
Logistics Planning and Scheduling Decision Support System for Emerging EMS
and 3PL Business Practices
Raymund J. Lin, Jack Huang
Institute for Information Industry, Taipei, Taiwan, R.O.C.
Norman Sadeh-Koniecpol, Benjamin Tsai
School of Computer Science, Carnegie Mellon University, Pittsburgh PA 15213, USA
Keywords: Logistics Planning and Scheduling, Web-based Supply Chain Management, Electronic trading, Mixed
Initiative Decision Support, Collaborative Planning.
Abstract: LogiCruncher is a dynamic logistics planning and scheduling module developed to support emerging third
party logistics practices. Given information about inventory profiles for different product types at different
locations, a set of transportation assets as well as a variety of quotes and contractual arrangements with
logistics service providers, the system is capable of generating or revising transportation plans and
schedules that meet changing customer requirements. These requirements are expressed in the form of
demands for delivering different types of SKUs in different quantities to different locations. The system is
capable of capturing a rich set of domain constraints and costs. It can be used to support the development
and dynamic revision of solutions as well as to support requests for quotes from prospective customers. This
includes support for “what-if” analysis through the creation and manipulation of solutions in different
contexts, each corresponding to possibly different sets of assumptions. This paper provides an overview of
LogiCruncher and summarizes results of initial evaluation.
1 INTRODUCTION
As manufacturing companies focus on their core
competencies and attempt to further reduce supply
chain costs and improve delivery performance, they
increasingly turn to third party logistics (3PL)
providers to manage both their inbound and
outbound logistics. Examples of current day 3PLs
include Fedex, UPS, DHL as well as many others.
Original Equipment Manufacturers (OEMs) such as
Cisco, Dell or Nokia go one step further and also
outsource key manufacturing activities to
Electronics Manufacturing Services (EMS)
contractors such as Flextronics, Sanmina-SCI or
Solectron to name just a few. EMS contractors are
faced with the delicate task of concurrently
coordinating manufacturing activities with inbound
and outbound logistics for a number of OEMs. This
involves dynamically orchestrating the activities of
hundreds, if not thousands, of suppliers with
operations at multiple manufacturing facilities and
with logistics and warehousing activities around the
globe - all to keep up with OEM demands that are
typically adjusted on a daily basis. To satisfy
demand from their OEM customers, EMS
contractors tend to rely on a combination of both in-
house and external warehouses and transportation
assets. Within such environments, supporting high
levels of product customization, increasingly short
product life cycles and tight delivery commitments
(all while minimizing costs) requires unprecedented
levels of supply chain visibility and coordination
(Figure 1). In this paper, we summarize ongoing
work on LogiCruncher, a logistics planning and
scheduling decision support tool aimed at supporting
tight integration between procurement,
manufacturing and logistics activities across the
global supply chain environments spawned by
emerging EMS and 3PL practices (Alp, 2003). In
particular, we detail the overall architecture of
LogiCruncher, focusing on the way in which it
176
J. Lin R., Huang J., Sadeh-Koniecpol N. and Tsai B. (2006).
LOGICRUNCHER - A Logistics Planning and Scheduling Decision Support System for Emerging EMS and 3PL Business Practices.
In Proceedings of the Eighth International Conference on Enterprise Information Systems - AIDSS, pages 176-181
DOI: 10.5220/0002464201760181
Copyright
c
SciTePress

supports dynamic coordination between
manufacturers, suppliers and logistics providers
under constantly changing conditions. This includes
a description of the system’s mixed initiative
functionality to enable users to collaboratively
explore alternative supply chain arrangements. We
also detail the system’s powerful modeling
framework, which enables it to capture both in-
house logistics and warehousing resources as well as
quotes obtained by third party providers.
Specifically, the remainder of this paper is
organized as follows. Section 2 provides a brief
review of the literature and highlights key innovative
aspects of LogiCruncher. Section 3 gives an
overview of the system’s overall architecture,
including a discussion of different ways in which it
can be configured to capture different possible
business practices. An overview of the
LogiCruncher logistics and warehousing model is
provided in Section 4. Section 5 focuses on heuristic
search procedures developed to support the rapid
generation and revision of large-scale logistics and
warehousing solutions under dynamic business
conditions. Empirical results obtained with these
procedures are summarized in Section 6. Section 7
contains some concluding remarks.
2 RELATED WORK
Traditionally, operations research has focused on
somewhat stylized models of logistics planning and
scheduling problems, favoring models that lend
themselves to the computation of optimal or near-
optimal solutions (e.g. (Cordeau, 2002; 2004; Li,
2005)). Over the past ten years, in parallel with this
work, a number of research efforts have attempted to
increasingly relax many of the assumptions made in
more classical models. This has included looking at
larger-scale problems (e.g. (Sadeh, 1996; Kott,
1998; 1999; Smith, 2004)), more dynamic models
(e.g. (Sadeh, 1996), (Kott, 1999; Smith, 2004)),
more complex constraints(e.g. (Sadeh, 1996; Kott,
1998; Smith, 2004)) along with support for more
flexible mixed initiative decision models (e.g. (Kott,
1999; Becker, 2000; Sadeh, 2003)).
LogiCruncher is a logistics planning and
scheduling decision support system that builds on
our own work on a mixed-initiative decision support
tool for collaborative supply chain planning and
scheduling in the context of the MASCOT system
(Sadeh, 2003), as well as our earlier research on
developing iterative improvement techniques to
build and dynamically update large-scale planning
and scheduling solutions (Sadeh, 1997).
LogiCruncher is unique in the way in which it
combines these techniques within a flexible
modeling framework capable of capturing a rich set
of emerging EMS/3PL practices. This includes the
ability to model hybrid networks of plants,
warehouses, distribution centers and multi-modal
transportation assets that include a mix of assets
directly under the control of an EMS organization
and assets made available by third party partners
under different contractual arrangements.
3 OVERALL ARCHITECTURE
LogiCruncher is a decision support shell aimed at
supporting mixed initiative planning and scheduling
functionality required by emerging EMS/3PL
business practices. The shell, which can be deployed
at the level of an EMS or a third party logistics
provider, aims to support users as they interact with
other participants across the supply chain. This
includes provisions for developing and revising
logistics plans and schedules that cut across multiple
suppliers, plants, warehouses and transportation
assets. Some of these assets may be directly under
the control of the user organization, while others
may be provided by third party organizations subject
to different types of contractual arrangements. This
includes both long-term arrangements as well as
more dynamic arrangements identified by issuing
Requests for Quotes (RFQs – or more generally
RFxs) and evaluating bids– see Figure 2. In
particular, the shell gives its user access to a number
of problem solving services, ranging from solution
generation and revision services to services aimed at
submitting RFQs, evaluating bids and even
submitting bids (e.g. in the case of a large third party
logistics provider). Using these services,
Figure 1: Effective supply chain management in emerging
OEM/EMS practices requires unprecedented levels o
f
visibility and coordination across global logistics
networks.
LOGICRUNCHER - A Logistics Planning and Scheduling Decision Support System for Emerging EMS and 3PL Business
Practices
177
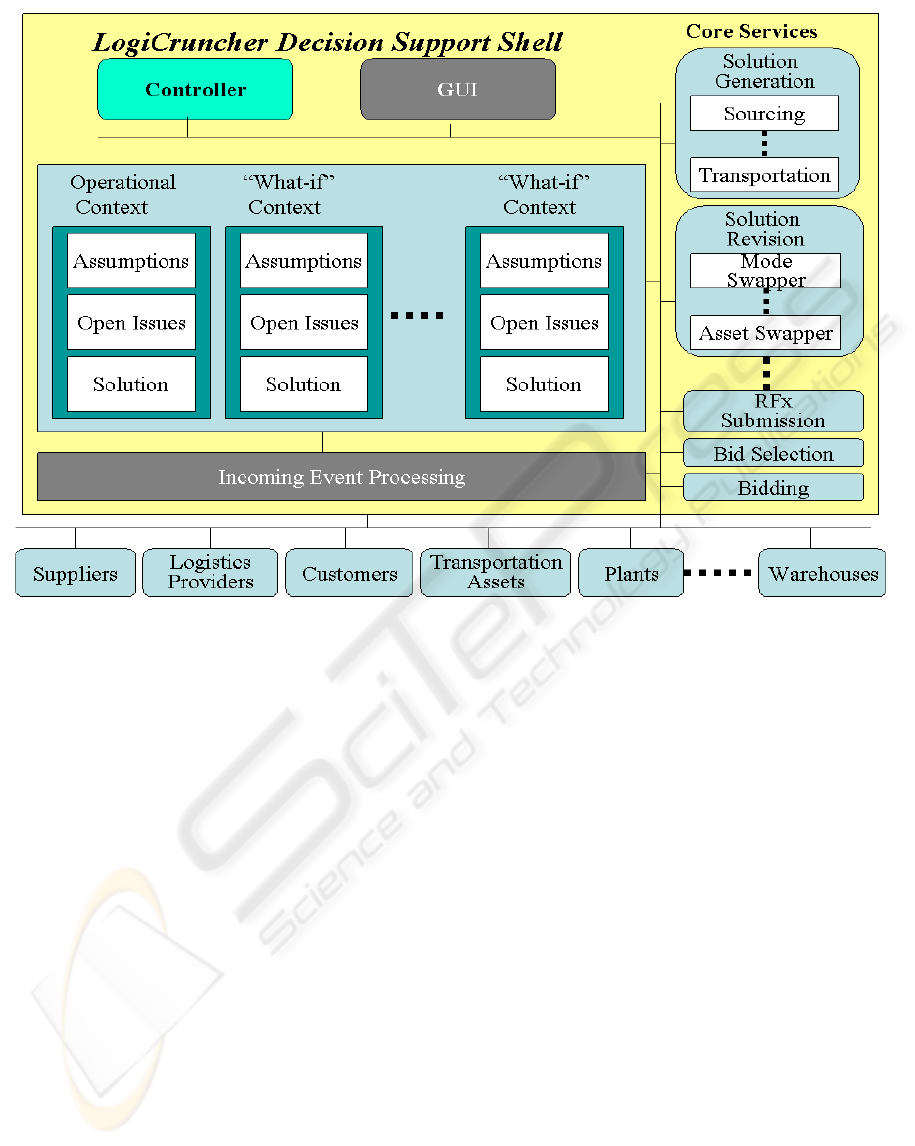
LogiCruncher users can concurrently develop, refine
and evaluate multiple solutions, using “what-if”
contexts that can differ in terms of working
assumptions and solutions (e.g. different customer
demand assumptions as well as different sourcing or
logistics arrangements). As new developments
unfold (e.g. changes in customer demands, arrival of
new bids from logistic service providers,
transportation contingencies, etc.), they are handled
by an incoming event processing module that
selectively updates relevant contexts (e.g. taking an
incoming bid and posting it in the context that
generated the corresponding request for quote). This
can be done either automatically or manually by the
user (e.g. if the user wants to selectively control
events that are visible within a given “what-if”
context). As they get posted into a given context,
events result in the generation or updating of “open
issues”. An “open issue” is a flag that is used to
identify aspects of a working solution that is either
incomplete, inconsistent or unsatisfactory (see
(Sadeh, 1998; 2003) for further details). Open issues
can be used to help the user compare contexts and
identify areas of a given solution that require further
work. They can also be used to support automated
decision support functionality that directly maps
problem solving services onto different sets of open
issues. Such mapping can be implemented through a
control module (“controller”) and can range from
providing suggestions to the user to automatically
invoking one or more services (e.g. in the form of
scripts) – see (Sadeh, 1998; 2003) for further details.
4 LOGISTICS PLANNING AND
SCHEDULING MODEL
A LogiCruncher Context corresponds to a set of
assumptions and possibly a planning and scheduling
solution developed under these assumptions.
Assumptions include customer demands (expressed
as “customer orders”) to be satisfied, a set of
available storage nodes, a set of transportation assets
as well as quotes obtained from providers of
transportation and warehousing services.
A Solution is an allocation of goods to customer
demands, including a selection of sourcing nodes
(e.g. plants, warehouses, distribution centers or some
combination of the above), a selection of
transportation modes and/or transportation assets to
Figure 2: LogiCruncher decision support shell: overall architecture.
ICEIS 2006 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
178

move these goods (“transportation plan”) and a
schedule for when each move is to take pace
(“transportation schedule”). A solution may be
complete or incomplete and may possibly include
some assumption and/or constraint violations, in
which case it is said to be inconsistent.
An Order represents a requirement for delivering
some quantity of a given SKU type to a point of
destination by a given date. An order will contain
information on due time, earliest acceptable delivery
time, latest acceptable time, and various penalty
costs. Each order is broken down into one or more
jobs that inherit the properties of the order, and
which together will satisfy the requirements of the
order. The fashion in which orders are split into jobs
may reflect an organization’s policy or contractual
arrangements or may be the result of limiting
sourcing and transportation conditions. Orders can
originate directly from actual customer requirements
or may reflect a company’s policies such as safety
stock policies.
LogiCruncher can capture constraints associated
with different transportation modes and be used to
model internal transportation assets as well as assets
operated by third party providers under different
contractual arrangements. This includes quotes
obtained from third party logistics providers as well
as longer-term contractual relationships.
Transportation modes as well as different classes
of transportation assets vary in terms of their
available routes, costs, speeds and capacities as well
as other idiosyncratic constraints (e.g. type of
products they can accommodate, setup constraints,
etc.).
Inventory Storage Resources represent resources
that can store components. These resources can be
used to model warehouses, suppliers, plants and
customer delivery sites. They can have capacity
constraints and restrictions on the different types of
SKUs they can accommodate. Each inventory
storage resource also has an inventory profile for
each SKU it can store. This profile indicates how
many units of each SKU is expected to be available
at that resource at any point in time, given existing
problem assumptions and decisions made in the
current context.
5 ITERATIVE SEARCH
TECHNIQUES
In LogiCruncher, solutions are developed and
refined through the activation of core problem
solving services, either manually or automatically.
Core problem solving services include (see Figure
2):
• Solution generation services such as services to
help optimize the nodes from which to source
SKUs required by different orders,
transportation planning and scheduling services,
etc.
• Solution revision services, which take an
existing solution (possibly partial or
inconsistent), and revise it to either resolve
some inconsistencies, complete the solution or
improve it. This includes services aimed at
exploring alternative sourcing options, the
selection of alternate transportation modes or of
different bids from logistics service providers. It
also includes finer revision services such as
services to swap resource allocations between
different orders in hope of producing a better
quality solution (e.g. lower inventory costs,
lower transportation costs, lower delivery
penalties, etc.)
• RFQ submission services that can be used to
issue requests for quotes to prospective business
partners (e.g. RFQs sent to third party logistics
providers)
• Bid selection services implementing logic that
can be used by LogiCruncher to select among
multiple bids (e.g. through what-if analysis in
multiple contexts and/or through the use of
solution revision services)
• Bidding services, in configurations where
LogiCruncher is deployed to assist a 3PL and
help the organization decide what to bid on and
help it determine optimal bid parameters.
This flexible architecture enables a number of
possible system configurations as well as a variety
of mixed initiative problem solving styles, where
solution construction and revision is interactively
controlled by an end-user, while tedious or complex
problem solving steps can selectively be delegated to
automated functionality (e.g. through control
heuristics embedded in the shell’s controller).
Experience with this mixed initiative architecture in
the context of collaborative supply chain planning
and scheduling scenarios is detailed in (Sadeh,
2003).
LOGICRUNCHER - A Logistics Planning and Scheduling Decision Support System for Emerging EMS and 3PL Business
Practices
179

In its simplest configuration, LogiCruncher can be
used to generate initial logistics planning and
scheduling solutions using its solution generation
services and can then be used to revise these
solutions as events unfold (e.g. as contingencies
occur, as demand changes or as new bids from
prospective business partners arrive). In its current
implementation, the LogiCruncher solution
generation services rely on a set of greedy heuristics
to rapidly generate initial solutions. Iterative
improvement techniques embedded in the form of
multiple neighborhood search heuristics can
selectively be invoked to further refine or improve
these solutions, whether in support of what-if
scenarios or to reflect changing conditions. The
following section briefly summarizes empirical
results obtained with these techniques.
6 EMPIRICAL EVALUATION
An initial version of LogiCruncher has been
implemented in Java. Experiments conducted on
scaled down logistics problems involving 600
customer requests, 10 to 20 warehouses, distribution
centers and customer delivery centers, multiple
classes of transportation assets, each with between
10 and 100 transportation units (e.g. 50 trucks, 100
vans, etc.) appear rather promising. Initial solutions
are generated in a matter of a few seconds. Iterative
improvement heuristics have been shown to
typically converge towards seemingly high quality
solutions within 30 to 120 seconds, though
admittedly additional experimentation is needed to
further evaluate the quality of these solutions. Figure
3 summarizes results obtained on eight problem sets
that differ in terms of logistics network layout, mix
of transportation assets and tightness of customer
requests. The results show improvement in solution
quality, starting from an initial solution generated by
the LogiCruncher solution generation heuristics, and
applying multiple rounds of iterative improvement
search.
7 CONCLUDING REMARKS
In this paper, we introduced LogiCruncher, a
logistics planning and scheduling decision support
shell aimed at supporting emerging EMS and 3PL
logistics scenarios. We focused in particular on key
elements of the LogiCruncher mixed initiative
decision support architecture as well as on its unique
modeling capabilities. These capabilities enable the
system to capture complex constraints and costs
under which EMS and 3PL service providers need to
operate, with logistics networks consisting of a mix
of transportation and warehouse assets, some
operated by these companies themselves and others
operated by third party players. Initial evaluation of
the system’s heuristics appear promising. As part of
our future work, we plan to further refine elements
of our model and evaluate an enhanced set of
heuristics on yet larger sets of problems to be
identified jointly with prospective end-user
organizations based in the Republic of China
(Taiwan).
ACKNOWLEDGEMENTS
The work reported herein has been supported in part
by the R.O.C.’s Institute for Information Industry
and in part by the US National Science Foundation
under ITR Grant 0205435.
REFERENCES
Alp, O., N.E. Ekrip, R. Gullu (2003). Outsourcing
Logistics: Designing Transportation Contracts
Between a Manufacturer and a Transporter,
Transportation Science 37(1) 23-29.
Becker, M. and S.F. Smith (2000, April). "Mixed-
Initiative Resource Management: The AMC Barrel
Allocator", Proceedings 5th International Conference
on Artificial Intelligence Planning and Scheduling
(AIPS-2000), Breckenridge, CO
Cordeau, J.-F., M. Gendreau, A. Hertz, G. Laporte, and J.-
S. Sormany, (2004). New heuristics for the vehicle
Figure 3: Performance of iterative improvement heuristics
on eight categories of logistics planning and scheduling
p
roblems. A total of 6 problems were generated in each
category.
ICEIS 2006 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
180

routing problem. In: Logistics systems: Design and
optimization. Eds.: A. Langevin and D. Riopel,
Kluwer Academic Publishers (to appear - earlier
version as Technical Report G-2004-33, GERAD,
Université de Montreal, Canada).
Cordeau, J.-F., M. Gendreau, G. Laporte, J.-Y. Potvin, and
F. Semet, (2002). A guide to vehicle routing
heuristics. Journal of the Operational Research Society
53(5) 512–522.
Kott, A., and V. Saks (1998, June). A Multi-
Decompositional Approach to Integration of Planning
and Scheduling – An Applied Perspective, in Proc. of
Workshop on Integrating Planning, Scheduling and
Execution in Dynamic and Uncertain Environments.
International Conference on Artificial Intelligence
Planning Systems, AAAI Press TR WS-98-02
Kott, A., V. Saks, and A. Mercer (1999, Spring). A New
Technique Enables Dynamic Replanning and
Rescheduling of Aeromedical Evacuation, AI
Magazine, Vol. 2, No. 1, pp. 43-54
Li, F., B. Golden, E. Wasil, (2005). Very large-scale
vehicle routing: New test problems, algorithms, and
results. Computers & Operations Research 32(5)
1165–1179.
Smith, S.F., M.A. Becker and L. Kramer (2004).
"Continuous Management of Airlift and Tanker
Resources: A Constraint-Based Approach",
Mathematical and Computer Modeling: Special Issue
on Defense Transportation
Sadeh, N.M., D.W. Hildum, and D. Kjenstad (2003).
"Agent-based e-Supply Chain Decision Support",
Journal of Organizational Computing and Electronic
Commerce, Vol. 13, No. 3
Sadeh, N.M., D.W. Hildum, T.J. Laliberty, J. McA'Nulty,
D. Kjenstad, and A. Tseng (1998, June). "A
Blackboard Architecture for Integrating Process
Planning and Production Scheduling". Concurrent
Engineering: Research and Applications, Vol. 6, No. 2
Sadeh, N.M. and A. Kott (1996). "Models and Techniques
for Dynamic Demand-Responsive Transportation
Planning", Technical Report CMU-RI-TR-96-09, The
Robotics Institute, Carnegie Mellon University,
Pittsburgh, PA 15213-3891.
Sadeh, N.M., Y. Nakakuki, and S. Thangiah (1997).
"Learning to Recognize (Un)Promising Simulated
Annealing Runs: Efficient Search Procedures for Job
Shop Scheduling and Vehicle Routing". Annals of
Operations Research, 75, pp.189-208
LOGICRUNCHER - A Logistics Planning and Scheduling Decision Support System for Emerging EMS and 3PL Business
Practices
181
