
Designing Educational Robots (Edot) as Space Learning Logic and
Spatial Media
Bertha Bintari Wahyujati and Martinus Bagus Wicaksono
Politeknik Mekatronika Sanata Dharma, Paingan, Meguwaharjo, Depok, Sleman, Yogyakarta, Indonesia
Keywords: Educational Robots, Learning Robot Design, Robot Toy, Simple Logic.
Abstract: The Edot educational Robot is a robot for early childhood, which can be played by children from the age of
5 years. Learning with technology media including robots will help children actively engage in learning.
Learning for children will be more interesting if they learn while playing. Technology will grow rapidly in
the future, therefore it is necessary to prepare a generation that is able to keep up with technological
developments. The introduction of technology needs to be started since early childhood. One of the media is
an educational robot. This educational robot was developed to help children in the following matters: 1.
Explain abstract concepts about STEM (Science, Technology, and Mathematics) and logic 2. Teach the
ability to understand the spatial scope of space. This educational robot named Edot is expected to children
learn about how to "program" in a simple way that is learning to plan direction from one place to the
destination by arranging the direction block card. By planning directions, children learn how to compile
orders for Edot who will "read" the commands and carry out according to the instructions that have been
prepared. Besides learning to program, Edot can be used to train cooperation skill for children when playing
together. Learn to know the environment, learn to sharpen and practice logic thinking.
1 INTRODUCTION
Robots are technologies that are increasingly
developing in an increasingly broad scope, not only
in industry but also in the scope of everyday life.
Educational robots are media to help tp learn with
certain specifications embedded in their learning
goals. Educational robots are as a medium of
exploration for learning through experience.
Experience will be easier to remember, understand
and then it will be easier to develop in accordance
with the level of learning education.
Through learning experiences that are happily
obtained, the children will be actively involved so that
teachers, mentors, and parents play a role as
facilitators and study companions. Therefore this
educational robot is designed to be treated as a
learning medium through play.
Playing is a learning method while gaining
experience. Games performed in a group can teach
various aspects of daily life. By playing, eating
experiences related to the social, cultural, economic
and physical or natural environment will develop.
The development of these relations will improve
language skills, thinking, behaving, associating and
working. When playing children - children will focus
their attention, feeling and thinking to play to the
nature and shape of the game. (Khohir, December
2009)
Basically, an educational robot is designed to
convey learning that is determined according to the
needs and age of the child. In this Edot robot learning
is designed to be carried out by early childhood, such
as Kindergarten and Playgroup so that there are
certain requirements related to the design standards of
playground equipment related to technology and
standard to security.
In addition, designer must consider the basic rules
set in safety standards; in applying standards on toy
safety, safety signs or graphic symbols for age
warning labels, standards for robots and robotic
systems, and electric toy security, mechanical safety
features and physical, flammable requirements,
specifications for the transfer of certain elements,
experimental sets for chemistry and related activities
and chemical toys in addition to experimental games.
(Mouroutsos, 2012)
Wahyujati, B. and Wicaksono, M.
Designing Educational Robots (Edot) as Space Learning Logic and Spatial Media.
DOI: 10.5220/0009395204350443
In Proceedings of the 1st International Conference on Interdisciplinary Arts and Humanities (ICONARTIES 2019), pages 435-443
ISBN: 978-989-758-450-3
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
435

The robot design for learning media is adjusted to
the development needs of children in kindergarten
and Playgroup ages, ranging in age from 4-5 years.
Therefore needs media to develop the ability of
children aged 4-5 years according to the Directorate
of Early Childhood Education (2002) is as follows
paying attention to nine children's learning abilities,
such as: 1) linguistic intelligence; 2) logic-
mathematical intelligence; 3) visual-spatial
intelligence; 4) musical intelligence; 5) kinesthetic
intelligence; 6) naturalist intelligence; 7)
interpersonal intelligence; 8) intra-personal
intelligence,and ; 9) spiritual intelligence.
Learning using this educational robot aims to help
children learn about simple logic programming,
mathematical logic, and spatial visual logic. In
addition to the cognitive aspects, children by playing
will train their psikomotor skills when arranging
objects or installing parts of a robot. The game using
educational robots is carried out in groups so that
children practice how to socialize, train their
emotional intelligence and social intelligence. They
must work together, discuss together, and help each
other to solve problems.
2 SPATIAL VISUAL MAPPING
LOGIC
Learn about visual and spatial sensitivity in children,
especially since an early age because this intelligence
is needed when children begin to recognize their
environment. Visual and spatial intelligence is the
ability to view space. With this ability, the child will
have a perception of objects that can be seen by the
five senses. These capabilities include understanding
objects, colors, and space and transforming objects
seen in other forms, such as sketches, paintings, and
views of geometric space. The ability to perceive
geometrically is one of mathematical-logical
intelligence. The ability to understand geometric is
needed when working with measurements, mapping
and imagining space in three dimensions. Whereas
according to Piaget & Inhelder: Yilmaz, 2009
((Alimuddin, 2018) Spatial ability is the ability to
understand abstract concepts that include the
relationship of understanding the position of objects
to space, determining the reference position of objects
in space, the ability to see objects from various
angles, the ability to estimate distances, and imagine
the movement of objects in space.
The learning aapproachment is giving problem-
solving tasks to spatial visual logic with games using
edot robots. Simple programming logic is done using
a method of reading towards a simple symbol of
direction. The problem with spatial understanding is
given with a pictorial map media that shows the origin
of the object and the final destination of the object.
Learning to use robots will help understand
abstract concepts of mathematical logic and spatial
logic. This educational robot is a teaching medium for
teachers and parents so that children are not only
listeners but actors. Educational robots are also an
introduction to children's knowledge about
technology. Children will be actively involved in
problem-solving and learning ideas from computer
science, and robotics, including the basic concepts of
computational thinking.
Robots are the introduction to the concepts of
Science, Technology, Engineering, and Math
(STEM) for early childhood. Referring to learning
standards it is necessary for early childhood to
recognize new technologies so that they should
integrate technology into the early childhood
education curriculum.
3 COMMUNITY RESPONSE
Surveys conducted to find out responses about the use
of robots for children's learning media can be grouped
as attributes specified in the robot.
Table 1: Educational Robot Attribute Ideas from the
community.
No. Attribute Descri
p
tion
1 construction
motors, batteries, frames and
boards can be assembled for
children of the child / Robot
can be assemble
d
Assembling parts must be safe
/ Form not sharp angles
2
Command
button
there is an on-off button on the
robot
in the "programming box"
there is a run button to send
the
p
ro
g
ram to the robot
3
Battery
Batteries are easy to
find/re
p
lace
the battery can be charge
d
4
Program
the robot can detect when in
the finish box (there is a finish
indicator box
the program consists of
forward, right turn, left turn,
sub-program, active magnet,
and inactive ma
g
net
5
Size robot size length = 10 cm
width = 10 c
m
ICONARTIES 2019 - 1st International Conference on Interdisciplinary Arts and Humanities
436

12x12cm robot track size gri
d
6 form
interestin
g
for
m
interesting track shape
7
sound
ruled b
y
voice
additional sound according to
the direction
additional songs if the robot
successfull
y
orders
8
accessories
the robot has a sound indicato
r
led li
g
hts as a robot face
A camera on a robot
the robot bod
y
is
g
iven a li
g
ht
The arrow is lit.
The Color on a robot
9
Additional robots can do matches, socce
r
Need to add challenges
Need En
g
lish
Robot mobility is more
flexible
4 STANDARD REGULATIONS
REGARDING EDUCATIONAL
ROBOTS
Designing tools and toys that use technological
elements, which is using motion or Mechanicsm,
using electrical resources as a driver and using
computer technology related to interfaces and
program systems have their own regulatory standards.
From the list of rules below are selected from the
standard regulations in Chiasson and Gutwin (HCI-
TR-2005-02) which are in accordance with the
educational robot designed. These regulations include
this following belows: The interface must be very
visual, avoid text as much as possible and reduce
cognitive load. 2. Special content metaphors are
useful in helping children navigate the interface. 3.
Instructions must be presented in an age-appropriate
format. 4. Instructions must be easy to understand and
remember. 5. Children are impatient and need
immediate feedback indicating that their actions have
an effect; otherwise they will repeat the action until
some results are felt. 6. The interface must provide
structure tools and guidelines to help children
remember how to do tasks. 7. Activities must allow
expanding complexity and must support children
when their skills increase from one level to the next
in the use of products. 8. Icons must be visually
meaningful for children. 9. Rollover audio,
animation, or lights must be used to show where to
find functionality. 10. The interface must provide an
indication of the current system condition, whether it
is busy processing or waiting for input from the user
11. The interface must track and display children's
environmental exploration if it is important for them
to remember where they were before. 12. The
interface needs to consider the fact that children may
not understand abstract concepts. 13. Interfaces may
not use extensive menus and sub-menus because
children may not have the ability to categorize or have
the knowledge of the content needed to navigate
efficiently. 14. Children are familiar with direct
manipulation interfaces, their actions must map
directly to actions on the screen. If other styles are
used, estimate that most users will need training and
that some will not be able to understand how this
interaction works. 15. Make interactions as simple as
possible. 16. Make all buttons have the same function.
17. Items must be large enough and within each other
to compensate for some inaccuracies in targeting. 18.
Children like a real interface because they like being
able to physically touch and manipulate devices. 19.
Direct manipulation allows children to explore and
actively participate in the process of discovery. 20.
Physical teaching aids and having large input devices
encourage collaboration. 21. Small changes in design
can produce very different physical interactions.
Different interfaces emphasize different actions. 22.
Technology must give children the ability to define
their experiences and control interactions .23.
Providing entertainment keeps children engaged and
motivated during the learning assignment. 24.
Activities must be interesting and challenging so
children want to do it for themselves
25. A supportive gift structure that considers the level
of child development and the context of use helps
children stay involved. 26. Technology for children
must facilitate social interaction between children.
27. Technology for children must explain children's
beliefs about computers and interact in a socially
consistent manner. 28. Give children each their own
tools when collaborating to encourage participation
and cooperation. This also leads to greater user
satisfaction.
5 REVIEW OF EXISTING
EDUCATIONAL ROBOTS
Robots have been used as learning media for children
and many are available in the market. The robot is
used as a reference to review the workings and
purpose of learning as a reference for designing this
educational robot.
The design and system references used by several
types of robots as written in table 2, concluded as the
Designing Educational Robots (Edot) as Space Learning Logic and Spatial Media
437

easiest system to be created, ease to used by children,
is the RFID card reading system. The RFID reader is
simpler because of direct reading so that after the
robot reads the received signal it will turn on the
motor driver to actuate the robot to moves. This easy
system will be easy for children to understand
because the immediatly reaction after reading the
code on the card will immediately seen the difference.
Instructions for directing and operating the robot are
simpler. With easy instructions and operations,
children can play by them selves.
6 DESIGN METHOD
The design method uses a morphological chart
method by applying a combination of components
using morphological maps. Alternative choices are
selected based on the criteria used as specifications
for the educational robot. Before making a
morphological chart, the components that will be part
of the robot are determined so that the robot can be
assessed and in accordance with the specifications of
the educational robot needed. Therefore needs will be
determined as a criterion for their specifications.
Determination of specifications through
identification of educational robot needs.
6.1 Identification of Needs
The need for educational robots in accordance with
the target users, namely early childhood based on the
results of interviews selected according to the ease
and technical feasibility of the implementation,
requires the main things as follows.
Table 2: Educational Robot Specifications.
No. Spesifikasi Kriteria
1 Simple, attractive shapes and colors W
2 Easy to operate D
3 Give target learning about
p
rogramming logic
D
4
Give target learning about spatial
logic
D
5
Has an interactive element W
6 Can be done in groups W
7
Can be developed for other learning W
8 Safe to play D
9 Easy to install and install W
10
Affordable prices D
Note :
W = Wish
D = Demand
6.2 Technical Specifications
From the reference review of existing educational
robots, the use of separate program boards with robots
requires complex technicalities. Relationships or
connectivity between program boards and robots are
needed Wi-Fi or Bluetooth. The program board is the
sender/transmitter while the robot is the receiver. In
the Bee and Mouse robot the program system is easy,
but the program results cannot be seen, because it is
based on the number of presses on a particular
direction button. With the ability of robots to
remember, a large enough dimension is needed. In
kubo robots, the system of readings and reminders is
a complex system. Running steps must also be two
steps.
With consideration of convenience, simplicity
and affordable prices, the selection of RFID systems
was chosen to make this educational robot. Reading
using RFID is a simple and relatively cheaper
mechanism. With a simple system it will be easy to
make, and still allows for further development
6.2.1 Technical Design
The technical design takes precedence so that the
suitability of the system that will be applied to this
educational robot can function and execute orders
according to the concept of an educational robot that
uses RFID control. The complexity of robots is
mainly only in the placement of its components. With
consideration of PCB layout, component size, and
interface between components, it will help determine
the shape of the casing or the appearance of the robot.
Power supply / power supply. A 5V DC power
supply is supplied to a system that is converted from
a 230V power supply. First, the step down
transformer will be used here to convert the 230V AC
to 12V AC. The microcontroller will only support DC
supply, so the AC supply will be converted to DC
using a rectifier. The output of the rectifier will have
a wave so the 2200 uF capacitor is used to filter the
wave.
The output of the filter is given to the voltage
regulator 7805 which will convert 12V DC to 5V DC.
The output of the regulator will be filtered using
1000uf capacitors, so that pure DC 5V gets as the
output of the power supply unit. The microcontoler
used is the Arduino Nano microcontroller.
Microcontroller. The microcontroller is a device
that can process analog and digital signals (Budiarso
& Prihandono, 2015). In this design, the
microcontroller used is Arduino Nano. This
microcontroller is used to read RFID tags through an
ICONARTIES 2019 - 1st International Conference on Interdisciplinary Arts and Humanities
438
RFID card. The results of reading the identity in the
RFID tag will be processed by the microcontroller.
The results of processing these signals will determine
the movement of EDOT according to the program
that has been written in the microcontroller. Arduino
Nano was chosen because it has small dimensions
when compared to Arduino UNO but has
specifications similar to Arduino UNO.
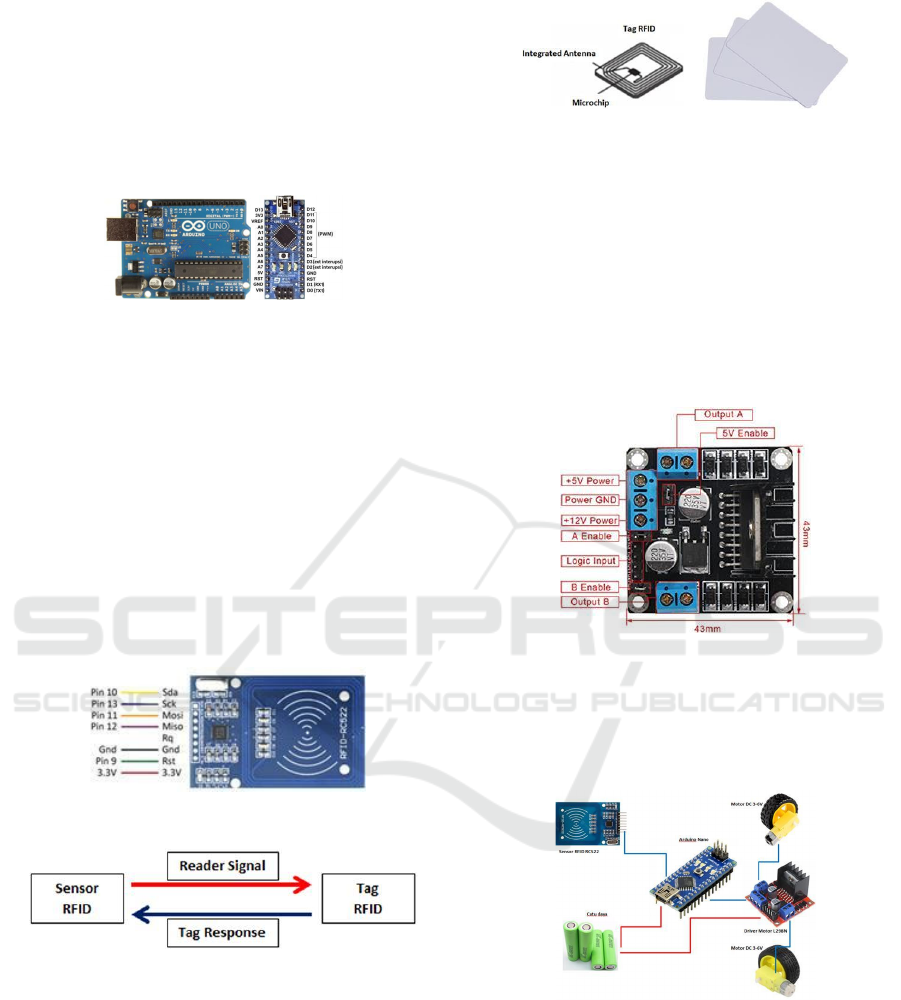
Figure 1: Arduino UNO dan NANO.
Sensor Unit. The sensor used in the robt EDOT is
an RC522 RFID reader sensor. Radio Frequency
Identification (RFID) is a technology used to detect
objects by utilizing radio frequencies used to emulate
modulated electro-magnetic waves (Hamdani, 2014).
These waves will be emitted by the reader (RFID
Sensor RC522) which will activate RFID tags that
have been filled with a certain identity. This identity
will be read by RFID sensors wirelessly without
being affected by existing environmental conditions
such as light or barrier objects. The workings or
readings of the sensors are illustrated in the figure
below.
Figure 2: Sensor Reader RFID RC522
Figure 3: Read method of tag RFID by RFID Sensor
Tag RFID. The RFID tag is a device consisting of
electronic circuits in the form of a microchip and an
antenna that is integrated with the circuit as shown in
the figure below. Memory on the RFID Tag makes
this tool capable of storing data in the form of a
unique identity (Rerungan, Nugraha, & Anshori,
2014). There are two types of RFID tags based on
their identity data, Read Only and re-Writeable. In
general, RFID tags have a unique identity for certain
needs.
Figure 4: Tag RFID structure
Motor Driver. Motor driver is a device or
electronic component used to control a DC motor.
The parameters that are controlled are the direction of
rotation and the speed of the motor. The driver motor
used is the L298N type. An L298N can be used to
control 2 DC motors at once. This type of driver is
able to drive a DC motor with a maximum voltage of
40 V DC and 2A current on each channel (Adriansyah
& Hidyatama, 2013). The L298N driver scheme is as
shown in the image below.
Figure 5: L298N motor driver
6.2.2 Electrical Scheme
The electrical scheme uses a chart as shown in the image
below.
Figure 6: EDOT Electrical Scheme
6.2.3 Layout Analysis Series
Electrical schemes are then arranged with an efficient
layout so that the robot dimensions meet the desired
size standards. The pattern of compiling electrical
components not only pays attention to the location
efficiency of functions, but also from security. Lay
out for edot robots has four layers, namely sensors,
Designing Educational Robots (Edot) as Space Learning Logic and Spatial Media
439
drive systems, control systems, voltage sources
(power supply).
.
Figure 7: Lay-out Sistem EDOT
6.2.4 Mechanism
The way the robot is designed is as follows when an
RFID reader sensor receives identity coding, a
program that has been inserted in Arduino as its
microcontroller will trigger the motor drive as an
actuator to move the motor on both wheels. This
microcontroller will adjust the speed of motion of the
right and left wheels, according to the coding identity
that they read.
6.3 Morfological Chart
Morfological chart or referred to as a morphological
map, is a table to make it easier for designers to get
alternative concepts of educational robots that are
sorted according to the division of components. The
sorting is based on existing robot references as a
reference. The combination of several components
into one educational robot unit that fits the criteria in
the specification, or has the expected attributes.
6.3.1 Morphological Map
This morphological chart is arranged by division
according to the following attributes: Forms,
additional working mechanisms, accessories and
technical.
Table 3: Educational Robot Specifications.
Com
p
onent Alternative A Alternative B Alternative C
1. Shape
2.Mechanis
m (RFID)
Alternative D Alternative E Alternative F
Arrange the
program or path
directions
The map has been
determined, the
arrangement of
directions has been
determined, just
choose the start
position and then
run it
Arrange the path
into the map
then run it
Assecories Alternative G Alternative H Alternative I
3.Lampu LED on when
running
the flashing light
blinks for the eyes
LED switch on
while run and
Off when
sto
pp
e
d
4.Sound Alternative J Alternative
K
Alternative L
Sound active
when running
the sound active if
the task is complete
Sound active
when strat and
off when
sto
pp
e
d
5.Color Alternative M Alternative N Alternative O
Casing color is
neutral for robot
Color combined for
the robot body and
top
Color can be
customized
Adding
Technics
Alternative P Alternative Q Alternative R
6.Assemblin
g
Knock Down Only certain part
can be knock down
Built in except
the batteries
7.Product
Pro
p
erties
Alternative S Alternative T Alternative U
Path directions
on cards
Path direction card
include a casing in
p
uzzles sha
p
e
Direction Path
have sticky
stickers
Map with
specific theme
Included symbol
thing example:
house model,
signange, flags, etc
Equipped with
instructions for
developing the
goal as needed
6.3.2 Morphological Map
Alternative design is a combination of possibilities on
the morphological map above. The selected
combination has the following criteria. 1. The shape
of a square box with the ease of unloading only on the
battery. 2. The color of the robot at the top can be
replaced. 3. Robots are operated directly on the cards
that have been arranged. 4. The light as an indicator
lights up, on the front as the eye. 5. The sound
indicates the command is complete. 6. Equipped with
an RFID card equipped with a card case. 7. Equipped
with instruction instructions for development as
needed.
Table 4: Educational Robot Specifications.
atribut
p
ilihan
p
ilihan
p
ilihan
1A B C
2D E F
3 GH I
4J
K
L
5M N O
6P Q R
7S T U
So the combination obtained is 1B, 2F, 3G, 4K, 5N,
6R, 7T. Robot sketches are drawn and selected and
then drawn using SOLIDWORKS software, with
adjustments to ease of drawing and ease of printing
3dimensions using 3D printer.
ICONARTIES 2019 - 1st International Conference on Interdisciplinary Arts and Humanities
440

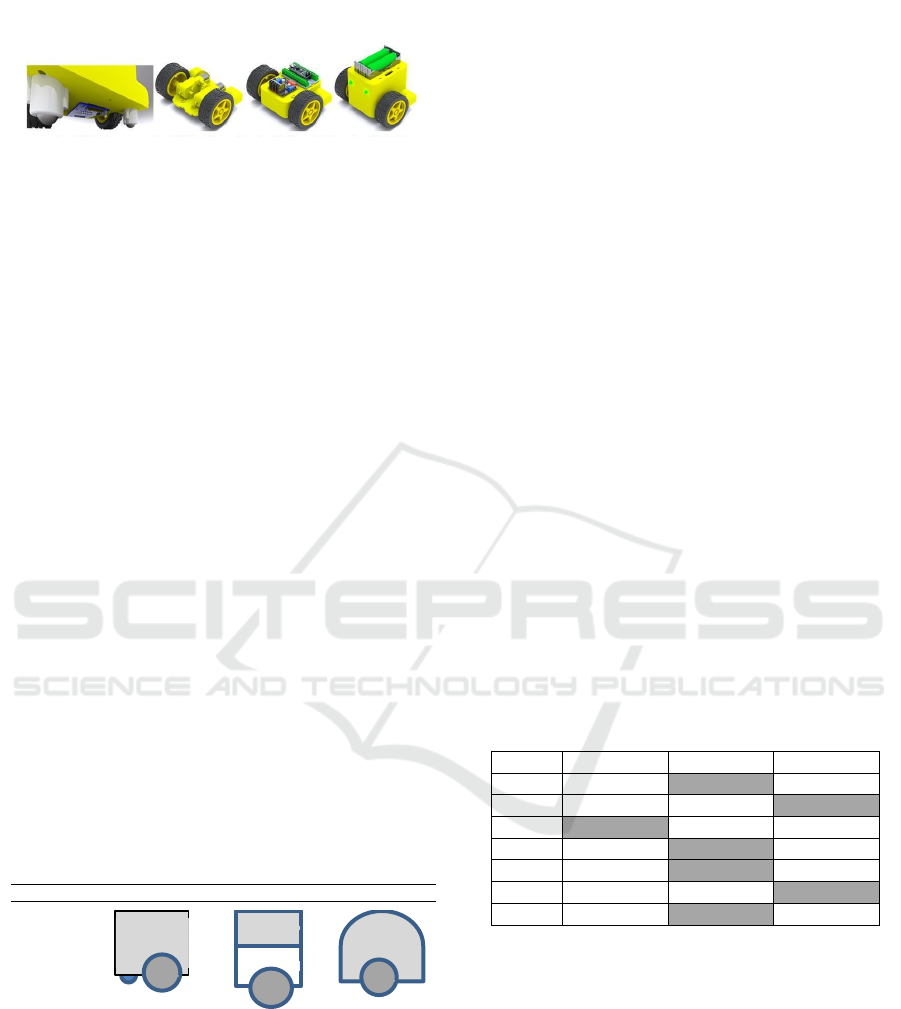
Figure 8: Robot Edot drawing (left) and Prototype (right)
6.3.3 Selections of Alternative Edot Robots
Are Selected
Edot robots are designed with sizes 10 x 7 x 12 cm
the size is a size that children can still hold easily.
Robot weight approximately 250 grams. The material
which used is PLA plastic. The top of the robot as a
battery cover can be removed while the components
and microcontroller are bolted so that it cannot be
dismantled by children without the help of adults. The
robber is attempted not to have sharp angles so as not
to injure the children. The battery can be removed and
recharged.
RFID cards are equipped with casing and have
been identified with the identity of the direction to be
used. In this case the Edot Robot was tested for
learning program logic and spatial logic. The two
learning targets are agreed to try by arranging the
direction from the place of origin to a certain
destination that the children want. The completeness
of this robot is a map that can be arranged as needed.
Figure 9: Edot reads RFID Tags
Table 5: Edot Robot Components.
Component Description
RFID card with the
specified direction code
identity, equipped with
a direction symbol
using a sticker on the
card. The card has a
p
uzzle sha
p
ed casin
g
An RFID card with
a Stop code identity as
an order stop, equipped
with a red circle symbol
using a sticker on the
card. The card has a
p
uzzle shaped casing.
DC motors are used by
two each - to move the
left and right wheels
RFID readers are
placed under Edot so
they can read the
magnetic frequencies
emitted b
y
RFID cards
The icrocontroller
layout is placed as
efficiently as possible
using restricted space,
as the second layer
The battery is placed as
the third layer, with the
battery housing. In this
section Edot's head
cover can be removed
and reinstalled to
facilitate battery
replacement
The back of the Robot
has an ON-OFF button,
which turns on the
power supply and turns
on the LED light as a
robot's eye.
6.4 Evaluate the Results of the Trial
The edot robot prototype test was conducted at
Ananda Mentari Kindergarten/Playgroup at Condong
Catur, Sleman. Game trials are carried out by children
aged 4-5 years.
Figure 10: Uji coba prototype Edot di TK Ananda Mentari
Trials are carried out as observations and answers
to questions about things as follows: 1. Can the Edot
robot be operated independently by children? 2. Can
the robot be operational as expected? 3. Are there
Designing Educational Robots (Edot) as Space Learning Logic and Spatial Media
441

errors? 4. Is there an idea of the possibility of
Development of the Edot Robot? 5. What is the
interaction of children with the Edot robot? 6. In
addition to answering a number of questions related
to the specifications of the educational robot
needed,as following belows: a) Simple, attractive
shapes and colors, b) Easy to operate, c) Give target
learning about programming logic, d) Give target
learning about spatial logic, e) Has an interactive
element, f) Can be done in groups, g) Can be
developed for other learning, h) Safe to play, i) Easy
to install, j) Affordable prices,
During the trial, children were gathered in a free
classroom, 12 children were grouped into 2 groups
who took turns playing the robot. Each prefix plays,
the instructions for playing are briefly explained and
demonstrated. During the game carried out by
children, observations were made while at the same
time capturing the responses of children and
accompanying teachers through direct interviews.
From the trial found a number of things as follows: 1.
Preparation of programs to arrange direction signs
can be done easily by children. 2. If done on the floor,
the enclosed card causes delay in reading the RFID
card, so that the Edot robot does not run smoothly. 3.
The use of DC geared motors has a character that is
not linear in its speed regulation so that the
adjustment of the position of the wheel needs to be
done delay settings through several trials. This delay
also causes children to be impatient and choose to
press the button repeatedly or push the robot forward.
4. With the position of the DC motor the "front"
direction should be reversed, because it turns out that
the position of the motor pushes the robot forward, so
that the placement of the lit eyes should be reversed
with the position of the ON/Off button. 5. The use of
maps is not very important, because it can be played
on a wide floor, by determining the place of origin
with the purpose added to another card. 6.
Development proposals to be developed for other
learning, such as counting and language. 7. For
robotic casings can be sold separately so that color
combinations can be arranged by children, better if
you use unique characters / animals. 8. For relatively
affordable prices because the technology used is quite
simple.
7 CONCLUSIONS
Learn with an interactive Edot robot for children
could be the alternative to involve children learning
something new. Children can be involved in groups
to learn to work in teams. Easy operations make
children interested in exploring as many possibilities
as possible. Obstacles in the form of errors due to
delays make children less patient so they tend to push
the robot forward first. For the drive motor, it will be
replaced with a DC geared motor with a lower
rotation so that the resulting torque is greater and
easier to control. The use of jumper cables is still not
so neat so that in the future PCB will be used so that
jumper cables are no longer needed, so it will be more
sturdy, neat and safe. The mass replication of Edot
robots is likely to be able to reduce prices for one Edot
Robot unit. Furthermore, for the possibility of
development can be done using the same system that
is using RFID readings, but developed for different
learning concepts.
Thus the development potential and potential of
early childhood learning using educational robots is
very good, it is necessary to develop the ability of
educational robots for different types of learning so
that it will be more interesting for children.
ACKNOWLEDGEMENTS
Thank you for The Headmaster of Mentari
Kindergarten and all the students of B class which
pleased to tried Edot to plearn and play.Thankyou for
helpfullness of my student, Adi, Kevin and Widi.
REFERENCES
Adriansyah, A., & Hidyatama, O. (2013). Rancang Bangun
Prototipe Elevator Menggunakan Microcontroller
Arduino ATMEGA 328P. Jurnal Ilmiah Teknik Elektro
Universitas Mercu Buana, 100-112.
Alimuddin, H. T. (2018). Profil kemampuan spasial dalam
menyelesaikan masalah geometri siswa yang memiliki
kecerdasan logis. . Histogram: Jurnal Pendidikan
Matematika, 2(2), 169-182. doi:
http://dx.doi.org/10.31100/histogram.v2i2.238.
Budiarso, Z., & Prihandono, A. (2015). Implementasi
Sensor Ultrasonik Untuk Mengukur Panjang
Gelombang Suara Berbasis Mikrokontroler. Jurnal
Teknologi Informasi DINAMIK, 171-177.
Chiasson, S., & Gutwin, C. (HCI-TR-2005-02). Design
Principles for Children’s Technology. Department of
Computer Science, University of Saskatchewan.
Hamdani, F. (2014). Penerapan RFID (Radio Frequency
Identification) di Perpustakaan: Kelebihan dan
Kekurangannya. Jurnal Ilmu Perpustakaan dan
Kearsipan Khizanah Al-Hikmah, 71-79.
ICONARTIES 2019 - 1st International Conference on Interdisciplinary Arts and Humanities
442

Khohir, A. ( Desember 2009). UPAYA MENDIDIK
ANAK MELALUI PERMAINAN EDUKATIF. Forum
Tarbiyah Vol. 7, No. 2,.
Mouroutsos, G. E. (2012). A Guide to safety standards of
toy robot. https://www.researchgate.com/publication,
1.
Rerungan, J., Nugraha, D. W., & Anshori, Y. (2014).
Sistem Pengaman Pintu Otomatis Menggunakan Radio
Frequency Identification (RFID) Tag Card dan
Personal Identification Number (PIN) Berbasis
Mikrokontroler AVR ATMEGA 128. Jurnal
MEKTRIK, 20-28..
Smith, J., 1998. The book, The publishing company.
London, 2
nd
edition.
Designing Educational Robots (Edot) as Space Learning Logic and Spatial Media
443
