
CAD-based Grasp and Motion Planning for Process Automation in
Fused Deposition Modelling
Andreas Wiedholz
1
, Michael Heider
2 a
, Richard Nordsieck
1
, Andreas Angerer
1
, Simon Dietrich
3
and J
¨
org H
¨
ahner
2 b
1
XITASO GmbH IT & Software Solutions, Augsburg, Germany
2
Organic Computing Group, University of Augsburg, Germany
3
Faculty of Electrical Engineering, University of Applied Sciences Augsburg, Germany
simon.dietrich@hs-augsburg.de
Keywords:
Grasp Planning, Motion Planning, Planning, Robotic Pick, Automation, ROS, Digital Twin.
Abstract:
Planning the right grasp pose and motion into it has been a problem in the robotic community for more than 20
years. This paper presents a model-based approach for a Pick action of a robot that increases the automation
of FDM based additive manufacturing by removing a produced object from the build plate. We treat grasp
pose planning, motion planning and simulation-based verification as separate components to allow a high
exchangeability. When testing a variety of different object geometries, feasible grasps and motions were
obtained for all objects. We also found that the computation time is highly dependent on the random seed,
leading us to employ a system of budgeted runs for which we report the estimated success probability and
expected running time. Within the budget, some objects never found feasible picks. Thus, we rotated these
objects by 90
◦
which lead to a substantial improvement in success probabilities.
1 INTRODUCTION
Planning grasps and motions are widely researched
problems in the robotic community, often ad-
dressed independently due to their great complexity
(Fontanals et al., 2014; Ghalamzan E. et al., 2016).
However, this renders the consideration of mutual in-
fluences impossible and results in a missing plausi-
bility check. For example, if grasping is planned,
the resulting pose might be unavailable due to a re-
stricted kinematic. A grasp planner determines a suit-
able pose for the robot gripper in relation to an object
it is supposed to grasp. This pose should lead to a
grasp forming either a positive or non-positive con-
nection which secures the object during movement.
The motion planner, in contrast, determines a motion
from a start pose to a target pose. If the robot has to
do a Pick and Place manoeuvre, the robot first adopts
the target pose before being able to grasp the object.
Subsequently, the robot moves it to the desired loca-
tion before releasing it.
In this paper, we present a new architecture to de-
a
https://orcid.org/0000-0003-3140-1993
b
https://orcid.org/0000-0003-0107-264X
termine grasp poses as well as motions to perform
a Pick manoeuvre. Since initial experiments have
shown that in our case study Place manoeuvres are
trivial, we focused our evaluation on the Pick ma-
noeuvre. We consider both robot and object location
as well as its orientation to be known and the environ-
ment to be free of unexpected obstacles. Although
object geometries can vary widely, they are known
prior to planning through exact CAD models. We sit-
uate our approach at a CAD based grasp and motion
planning system (CAROL) in the context of fused de-
position modelling (FDM)—an additive manufactur-
ing (AM) technique. Here, we encounter a large va-
riety of objects that need to be grasped differently.
However, as producing an object takes at least 15-20
minutes (and sometimes substantially longer), suffi-
cient time remains for planning anew. Additionally,
in FDM, the exact CAD-models are always available
as well as the information about the position and ori-
entation of the object on the build plate and the target
position. Furthermore, the position and orientiation
of the object on the build plate can both be set freely.
In AM objects are rarely produced in large quanti-
ties and the variety of objects is considerable. There-
450
Wiedholz, A., Heider, M., Nordsieck, R., Angerer, A., Dietrich, S. and Hähner, J.
CAD-based Grasp and Motion Planning for Process Automation in Fused Deposition Modelling.
DOI: 10.5220/0010571204500458
In Proceedings of the 18th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2021), pages 450-458
ISBN: 978-989-758-522-7
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

fore, programming the robot manually for each object
(or even type of object) is not feasible. While in re-
cent years numerous approaches using machine learn-
ing for grasp planning have been studied (Zelch et al.,
2020), they share difficulties of generalizing to pre-
viously unknown objects and are typically trained on
domain specific datasets as shown by Zunjani et al.
(2018) and Depierre et al. (2018). Since all informa-
tion is known a priori in our use case, we are able
to circumvent these limitations by relying on a com-
pletely model-based approach.
In our evaluation we combine an explicit grasp
planning with an explicit motion planning based on
the exact 3D models of robot, environment and gras-
pable object. Explicit in this context means that we
do not estimate poses (Chen et al., 2018) or execute
random motions (Garg et al., 2020) towards a de-
sired pose. In theory, however, our approach does not
rely on this explicitness as we are able to validate the
planned motions and grasps through our simulation
which constitutes a digital twin.
2 RELATED WORK
In the past years, the state of the art in grasp planning
changed more and more from CAD-based (Miller
et al., 2003; Gatrell, 1989) to computer vision (Zhao
et al., 2019; Huang et al., 2020) and machine learn-
ing (ML) (Zunjani et al., 2018; Depierre et al., 2018)
based approaches. One possible reason for this trend
is the shifting of robot applications and their use cases
in recent years. In many current applications, the
robot has to recognize and pick up unsorted objects
lying on a desk in front of the robot (Tanwani et al.,
2019; Lee and Lee, 2020). In these scenarios, avail-
able information about the object geometry or posi-
tion is insufficient to manipulate it using a robot arm.
Therefore, a common approach is to use cameras and
computer vision to acquire the missing information.
Also, new technologies, big databases and well
trained networks help to improve the performance and
success rate of ML-based robot applications. Neu-
ral networks, in particular Convolutional Neural Net-
works (CNNs), are being used to predict grasp con-
figurations in robot applications. Mahler et al. (2018)
developed Dex-Net, which relies on CNNs to plan ro-
bust grasps. With the help of this network, it was pos-
sible to execute grasp planning with a cellphone and
an augmented reality app (Zhang et al., 2020). Fur-
thermore, Kumra and Kanan (2017) present a robotic
grasp detection system that uses an RGB-D image
of a scene to extract features of the environment and
then uses a CNN to predict the grasp configuration for
the object to be grasped. Another approach that uses
learning systems is from Bohg and Kragic (2010).
The authors train a machine learning model from sev-
eral examples and test it on novel objects. With their
experiments, they show that a non-linear classifica-
tion algorithm with shape context can lead to a stable
detection of grasping points for many different ob-
jects.
Model-based approaches require exact knowledge
of the environment, including all possible obstacles
if the robot is not equipped with collision avoidance,
which is a cost factor in real-world problems. Hou
et al. (2018) tried to achieve a more stable grasp by
pivoting and compliant rolling (rolling a grasped ob-
ject over the surface to improve the grasp quality) af-
ter the gripper first grasped the object. To achieve
lower computation times Goldfeder et al. (2007) sim-
plify CAD models with the help of decomposition
trees and superquadrics. Superquadrics are objects
with a simple geometry such as a cylinder or cuboids.
The authors first abstract the complex object with
only one superquadric. The abstraction is iteratively
refined until a satisfactory precision is reached by
adding more superquadrics. Then they start to plan
and execute the grasp.
For real world applications not only grasp plan-
ning but also motion planning is required. Depend-
ing on the use case you may dispense with an exact
grasp planning and use a grasp pose estimation in-
stead. Huang et al. (2020) implemented a moving
object tracking algorithm that detects and grasps an
object that moves on a conveyor belt setup or with a
random motion. One possibility for planning a move-
ment is to use a Voronoi diagram as seen by Dorn
et al. (2020): In their paper, they present the genera-
tion of Voronoi diagrams using a voxelization of the
surface with a GPU render approach. The accuracy
of their diagram for subsequent path planning meets
requirements of only a few millimetres tolerance.
Many approaches use point clouds to acquire in-
formation about the object and use it to calculate a
feasible target pose (Gonc¸alves and Lima, 2019; Rosa
et al., 2016).
These sorts of approaches often use RGB-D cam-
eras to generate these point clouds of the object for
planning. As shown by Chen et al. (2018), some in-
formation about the object is lost when only using
point clouds even if there are two cameras installed.
Garg et al. (2020) describe a system that helps one-
armed people to grasp objects from their environ-
ment by marking an object the robot is supposed to
grasp with a laser pointer. With a stereo-camera and
OpenCV, information about the object is gathered in
the form of point clouds and used in the motion plan-
CAD-based Grasp and Motion Planning for Process Automation in Fused Deposition Modelling
451
ning with ROS (Quigley et al., 2009) and MoveIt!
(G
¨
orner et al., 2019). Huh et al. (2018) present a
sampling-based motion planning method for Pick and
Place manoeuvres with high DoF manipulators. Their
approach efficiently selects the optimal grasp pose for
manipulators with redundant degrees of freedom, thus
achieving much lower computation times than other
sampling-based motion planners. In an ROS context,
MoveIt! is a widely used tool for CAD and sampling
based motion planning. The latest version of MoveIt!
offers a continuous collision detection
1
and a grasp
planner
2
which uses Dex-Net as described by Mahler
et al. (2018). We provide the same functionality but
enable exchangeability of specific components e. g. if
a non-integrated component is anticipated to lead to
better results. In addition, we use the exact 3D mod-
els of all objects involved in the process for grasp as
well as for motion planning.
As the additive manufacturing scenario provides
us with exact models, we have more detailed informa-
tion available than computer vision based estimation
methods (Chen et al., 2018), which we utilize to gen-
erate better grasps. Another method that utilizes 3D
models to improve picking and detaching target ob-
jects in an additive manufacturing scenario is shown
by Becker et al. (2020). They use CAD models (i.e.
STL files) and combine them with GCODE—FDM
printer instructions that are used to print each layer
of the object—to generate collision free trajectories.
In contrast to this approach we first have to calcu-
late target robot poses because we have to grasp ob-
jects we do not have precalculated good grasp poses
for. In contrast to Fontanals et al. (2014), we sepa-
rate grasp and motion planing, rather than integrating
them. This provides the benefit that if either grasp
planner, motion planner or simulation do not work
perfectly for a specific use case or scenario, they are
easily exchangeable. This is aided by defining ab-
stract interfaces, each of which aims to address in-
dividual sub-problems.
3 METHODOLOGY
In this section, we introduce our approach of a CAD
based grasp and motion planning system (CAROL).
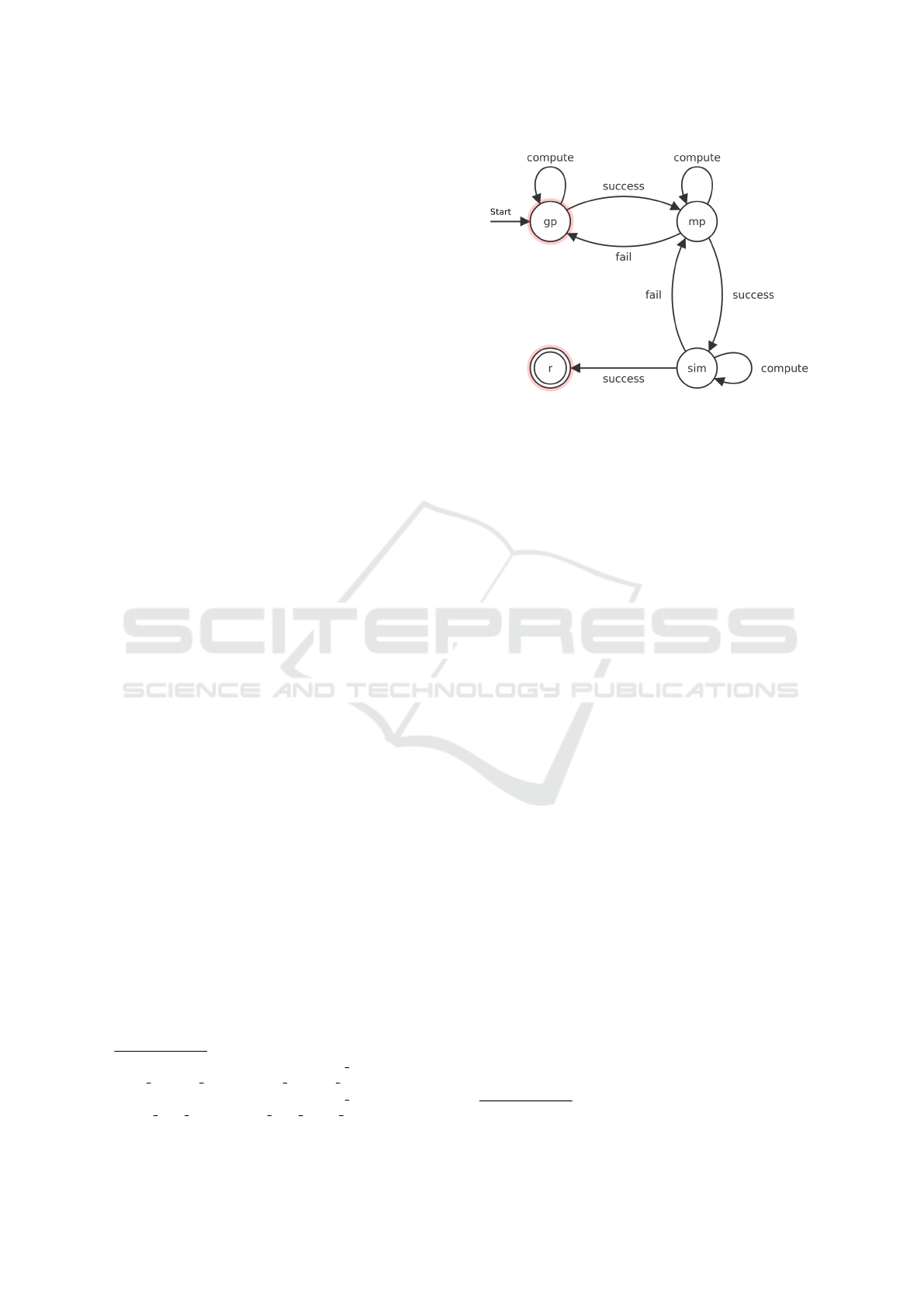
Figure 1 shows the general workflow as a state
machine. The states are named gp for grasp planning,
mp for motion planning, sim for simulation and r for
1
https://ros-planning.github.io/moveit tutorials/doc/
bullet collision checker/bullet collision checker.html
2
https://ros-planning.github.io/moveit tutorials/doc/
moveit deep grasps/moveit deep grasps tutorial.html
Figure 1: Finite state machine of the process for planning a
movement for the robot.
robot. The exchange of data between grasp and
motion planning and simulation is limited to the
necessary information (i.e. grasp poses, gripper
positions or desired joint positions required during
pathing). As soon as the grasp planner has found
good grasps, these grasps will be sent to the motion
planner. The motion planner then tries to find a fitting
motion and if it succeeds, the motion is validated in
a simulation. If no motion could be found or if all
motions found were rejected by the simulation, the
grasp planner is executed to find new grasps. This is
repeated until a motion is validated in the simulation
and can be sent to the robot for execution.
We use GraspIt! (version 4.0.0) (Miller and Allen,
2004) for grasp planning, MoveIt! (version 1.0.7) for
motion planning and Gazebo
3
(version 9.0) as sim-
ulation. GraspIt! tests thousands of possible grasp
configurations, evaluates these non-positive connec-
tions according to Grasp Wrench Space quality met-
rics and returns the best ones. The kinematic of the
robot is not considered in GraspIt!, which leads to
the generation of non-feasible grasp poses. MoveIt!
wraps the Open Motion Planning Library (OMPL)
(Sucan et al., 2012). Of the sampling based motion
planning algorithms implemented in OMPL we use
RRT* (Noreen et al., 2016). Gazebo is an often used
simulation for robotics applications, in particular in
conjunction with the Robot Operating System (ROS).
We use ROS for connecting all these components. In
this ROS context, we implemented nodes, which use
GraspIt! or MoveIt! and manage the reactions of the
components to specific events e. g. failure in motion
planning or rejection of a motion in the simulation.
The huge advantage of implementing a separate node
for every sub-problem is the easy interchangeability
of the planners. This interchangeability is further re-
3
http://gazebosim.org/
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
452

inforced by relying on standard message types of ROS
for data exchange. Therefore, no component specific
messages are needed. We found that MoveIt!’s stan-
dard hyperparameter settings were appropriate for our
use case. The code, installation and usage instructions
are freely available on GitHub
4
.
4 CASE STUDY
CAROL is developed in the context of a research
project with the aim to optimize the parameteriza-
tion process of fused deposition modelling by study-
ing environmental influences on the process (Nord-
sieck et al., 2019). To this end, we extract rules based
on operator interactions (Nordsieck et al., 2021) and
combine them with learning systems (Heider et al.,
2020) which requires an accurate dataset. To build
this dataset, we perform extensive series of test prints
of different objects. After each print job, the printed
object currently has to be removed manually from the
printing plate before the next print job can start. To
reduce the manual effort and increase throughput of
print jobs, we want to automate this process by using
a robot to remove constructed objects from the build
plate. Thus, the research question for this case study
can be formulated as follows:
Is it feasible to achieve robust robot-based
automation in unloading varying printed parts from
an FDM printer?
Figure 2 shows our real world setup with a 5 DoF
manipulator Kuka YouBot placed in front of a Creal-
ity Ender 3 printer. An example showing the setup in
motion executing CAROLs instructions can be found
here
5
. A Raspberry Pi 2B with OctoPrint
6
(version
1.3.11) is connected to the Ender 3. OctoPrint is a
web interface with which a user can control an FDM
printer, upload files to print, access information from
sensors and add plugins for additional functionality.
In Figure 3, an example architecture for automat-
ing object removal with a robot in an FDM scenario is
shown. A slicer, e. g. Cura
7
, turns STL files into ma-
chine readable GCode. The STL files and the GCode
are uploaded to a database from which a machine
control system (MCS)—in our case OctoPrint—can
obtain the GCode and manage the FDM printer. The
MCS also triggers CAROL, which fetches the re-
quired data from the database and starts the planning
4
https://github.com/XITASO/CAROL
5
https://xitaso.com/wp-content/uploads/carol.mp4
6
https://octoprint.org/
7
https://ultimaker.com/de/software/ultimaker-cura
Figure 2: Real world setup with the robot (using a soft grip-
per) in front of the cartesian FDM printer.
Figure 3: Our software architecture for integrating robotic
automation into FDM.
and execution of the robot movement. It is fur-
thermore possible (but not yet implemented in our
work) to let CAROL control the rotation of the
printed object by specifying the desired rotation in
the Slicer component.
Using the youBot poses significant challenges to
CAROL: aside from the kinematic restrictions caused
by having only 5 DoF, the YouBot suffers from addi-
tional restrictions due to its rigid gripper, which strug-
gles to grasp complex objects.
To address the grasping related restrictions, we
also evaluated a contact-driven deformation based
soft gripper
8
, that is more likely to successfully grasp
or manipulate a large variety of objects (Shintake
et al., 2018). However, the soft gripper introduces
8
http://www.youbot-store.com/developers/
soft-two-finger-gripper-75
CAD-based Grasp and Motion Planning for Process Automation in Fused Deposition Modelling
453
new kinematic restrictions to be solved during plan-
ning due to its bigger size. Nevertheless, from our
point of view these challenges will help the general-
ity and transferability of our approach CAROL—if it
can handle them, it should be easily adaptable to stan-
dard 6 DOF robots.
5 EVALUATION
To evaluate our approach, we designed experiments in
which we placed the robot in different positions rela-
tive to the FDM printer, manipulated objects with dif-
ferent geometries and utilized two different grippers.
The robot was placed to the left (−90
◦
), in front (0
◦
)
or to the right (+90
◦
) of the FDM printer. We sus-
pected the difficulty of finding a grasp to also vary
with object orientation. Thus, we utilized a two tiered
experimental design. Firstly, we tested CAROL with
the object’s default orientation, which is determined
by the way the slicer places the object on the build
plate based on the information contained in the CAD
model. Secondly, we rotated the object by 90
◦
along
the z-axis and re-applied CAROL. To conserve com-
putation time, we only performed the second tier ex-
periment series whenever the first tier showed sub par
results. We ran each experiment 30 times to elim-
inate statistical influence. A run is successful (and
completes) if CAROL was able to find a feasible mo-
tion into a pose that allows to grasp the desired object.
This motion has to be collision-free and validated by
the digital twin in the simulation. GraspIt! as well as
the motion planning algorithms wrapped by MoveIt!
are probabilistic. Thus, restarts of those components
(unless initialised using the same seed) explore the
search space differently. Runs are budgeted, i.e. af-
ter a certain amount of computation time was spent,
the run is stopped even without finding a valid motion
and grasp. As we expect the production process of a
singular object to take at least 20 minutes (including
the time to preheat the components and let the ob-
ject cool down to solidify), we set that budget to 20
minutes, although feasible solutions are usually found
much faster, cf. Table 2. The evaluation can easily
run on typical office hardware without the need for
high performance computing. In our case we utilised
a Lenovo Thinkpad T470p with an Intel
R
Core
TM
i7-
7700HQ@2.80 GHz and 16 GB RAM. The ROS in-
terface
9
we used for GraspIt! does not support multi-
threading. However, motion planning with MoveIt!
has better multi-threading support and runs on at least
two cores simultaneously.
9
https://github.com/JenniferBuehler/graspit-pkgs
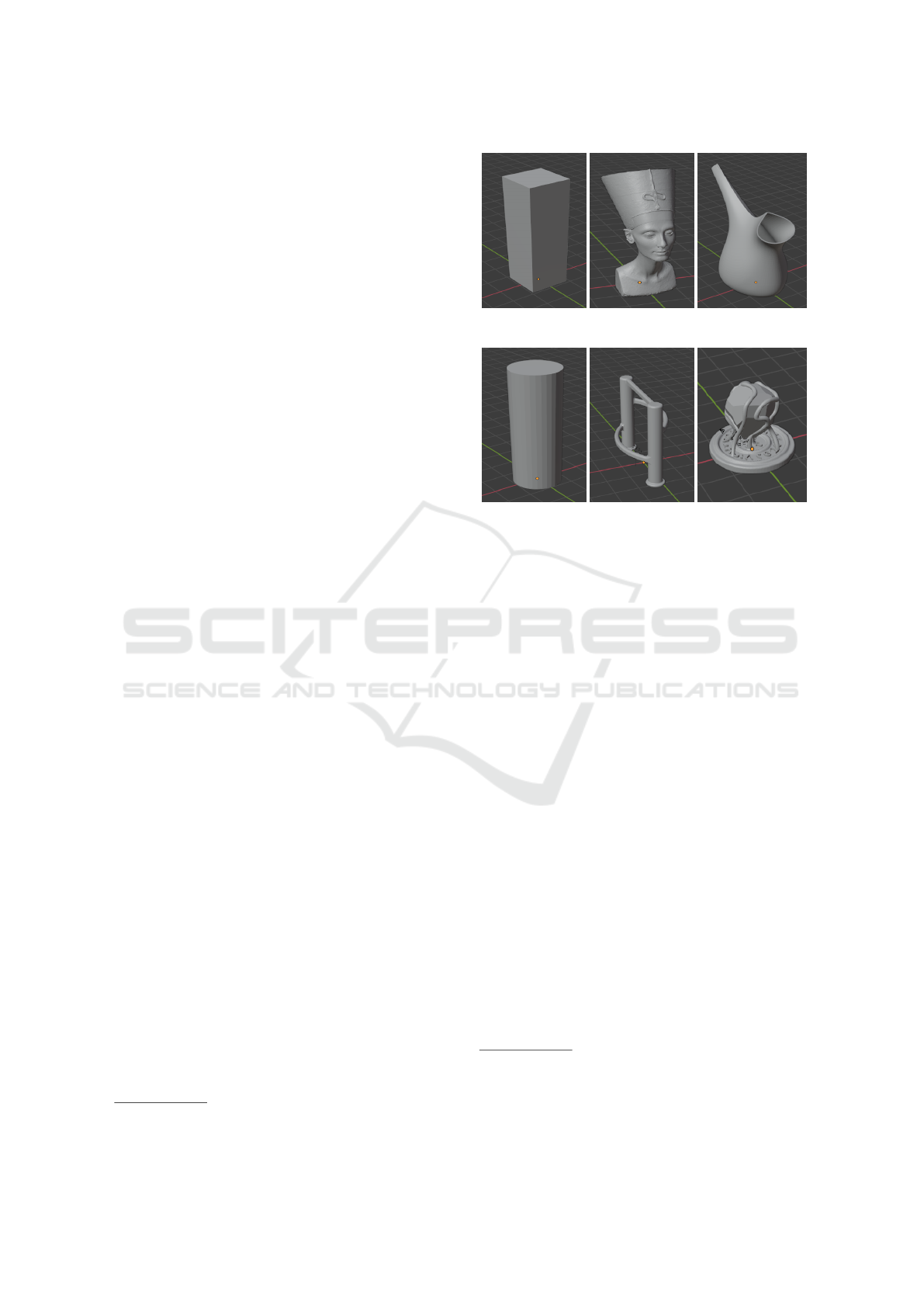
(a) Box.
(b) Nefertiti
10
. (c) Watering can
11
.
(d) Cylinder.
(e) 3D print test
12
. (f) Stone
13
.
Figure 4: Objects of widely varying geometry tested with
CAROL.
For evaluation, we utilise the Estimated Success
Probability (ESP) which describes the probability of
finding a motion that is validated by the simulation
in a single run. As we define finding a feasible solu-
tion as a successful run, the ESP is equivalent to the
Feasibility Rate. ESP is determined by the ratio of
successful runs to the total number of runs.
The six objects of varying geometrical complex-
ity for which we evaluated CAROL are shown in Fig-
ure 4. In the depiction, they are rotated for the best
visibility of their geometrical features.
The results of our experiments presented in Ta-
ble 1 show that all objects are graspable from at least
one position of the robot relative to the FDM printer.
However, the rotation of the object by 90
◦
(denoted
by r behind the reference) achieved successful runs
without the need to modify the robot’s position. Thus,
we conclude that when runs are not successful after a
certain amount of computation budget was spent, the
rotated object should be tested instead. In our experi-
ence, rotating the object did not negatively impact the
production process. Note that the success rate is fore-
most dependent on the grasp poses provided by the
grasp planner, with some poses not feasible in cer-
tain robot positions. For instance, in our experiments
with objects 4b and 4e, the original success rates dif-
10
https://www.thingiverse.com/thing:1376105
11
https://www.thingiverse.com/thing:770590
12
https://www.thingiverse.com/thing:2397160
13
copyright by: https://www.cgtrader.com/roolz
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
454
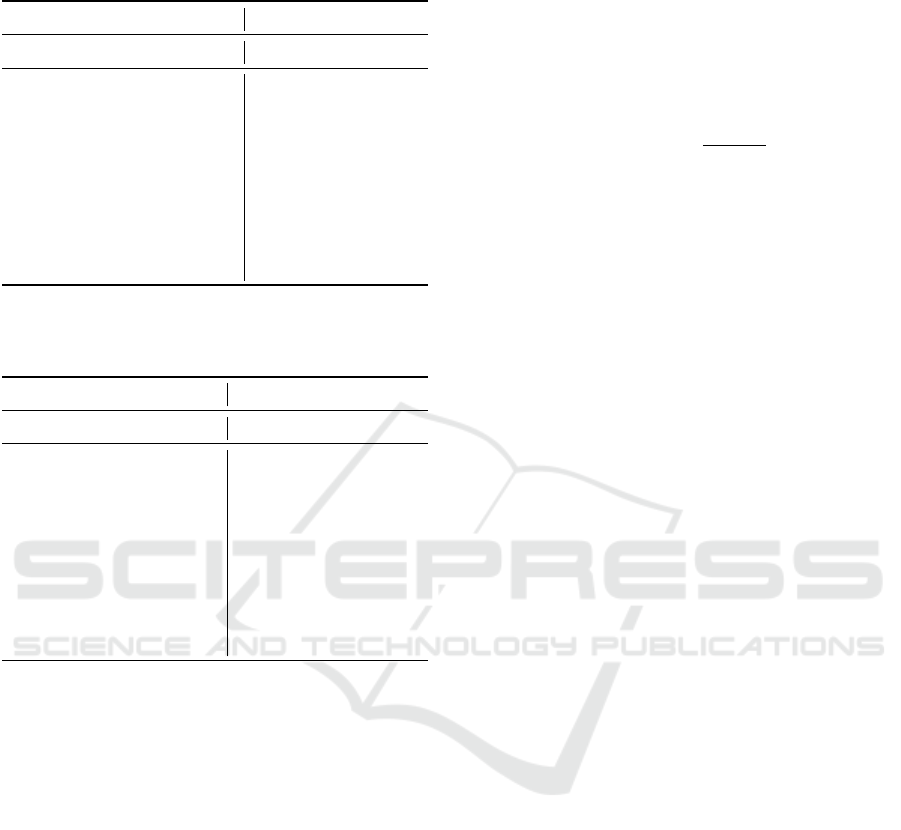
Table 1: Estimated Success Probability (ESP) [%] of a bud-
geted run to find a feasible solution.
parallel gripper soft gripper
obj left front right left front right
4a 93 57 73 53 80 67
4b 3 80 0 0 50 0
4b r 97 3 90 30 13 40
4c 80 7 57 23 63 3
4c r 0 90 7 77 33 63
4d 20 17 17 47 23 23
4e 37 90 13 0 93 0
4e r 70 0 93 93 0 90
4f 97 67 13 27 20 13
Table 2: Expected running time (ERT) [min:sec] to find a
feasible solution. ∞ is used to denote experiments for which
no solution was found in the given computation budget.
parallel gripper soft gripper
obj left front right left front right
4a 4:55 5:43 6:14 6:48 7:13 5:54
4b 7:42 5:35 ∞ ∞ 7:21 ∞
4b r 5:11 9:19 5:22 6:29 6:44 6:48
4c 5:48 2:14 8:04 10:47 7:15 16:51
4c r ∞ 5:36 8:09 6:33 10:35 7:27
4d 5:53 8:50 7:46 11:45 10:20 6:00
4e 9:16 6:24 6:43 ∞ 4:54 ∞
4e r 6:09 ∞ 8:32 3:00 ∞ 7:19
4f 4:03 9:19 8:33 10:26 5:43 19:28
fer considerably from the rates of the rotated object.
Objects such as 4a and 4d, that should not neces-
sitate a specific orientation of the robot due to their
symmetry, have approximately the same success rates
for at least two of the tested positions. The angular ge-
ometry of object 4a results in more stable grasps from
certain poses than others, whereas for object 4d, the
orientation of the grasp pose has no influence on the
grasp quality. Object 4d is an especially interesting
case as its seemingly simple geometry would indicate
that it is easy to grasp. Nonetheless, neither compu-
tation times nor success rates reflect that assumption.
A likely explanation is that, as it is round, the grip-
per connects to a limited contact area, which leads to
unstable grasps.
We assume that the importance of the grasp pose is
increased because we have a missing DoF in our ma-
nipulator that is fixed in a certain position. Therefore,
we are only able to accept a limited range of orienta-
tions in our target pose. Additionally, in the case of
the parallel gripper, we want to grasp objects that just
fit in between the fingers. Consequently, there is not
much space available to accept target poses with ori-
entations slightly out of our range for desired poses.
The expected running time (ERT) (Price, 1997) is
the computation time we expect a successful run to
take in order to find a validated motion. The ERT is
calculated as follows, with n as number of successful
planning attempts and t
m
as the time to conclude a
singular run m ∈ {0, ..., n}:
ERT
object
=
∑
n
m=1
t
m
n
The ERT—in combination with the ESP—indicates
whether the time to plan a grasp and motion is suffi-
cient if we consider continuous production of objects.
Note that unsuccessful runs always consume the al-
lotted budget and that we assume a fixed and limited
hardware.
The results of our experiments in regards to ERT
are shown in Table 2. An ERT with the value ∞ is
placed whenever we were not able to find a valid mo-
tion for an experiment. We observe an ERT of ∞ in
experiments 6b, 6c r, 6e and 6e r. However, if the
object was rotated, we were able to find a valid mo-
tion for all cases. Consequently, it can plausibly be
assumed that a specific point exists at which it would
be more efficient to restart the planning process with a
rotated object. Finding this point would require exten-
sive statistical analysis which we have not performed
yet. However, employing this principle, CAROL can
automatically find a valid motion for 100% of tested
objects. From our experience, we can furthermore as-
sume that users will require only moderate amounts of
experience to estimate productive rotations from the
object geometry alone.
Interestingly, ESP and ERT do not seem to in-
versely correlate. Hence, it seems likely that some
random seeds used by our planning processes are in-
herently better suited for exploration than others. The
presented times may seem very high in comparison
to state-of-the-art evaluations shown by (Meijer et al.,
2017; Yang et al., 2018). However, it has to be noted
that their evaluations refer only to motion planning
by itself. A target pose was given beforehand and
did therefore not have to be computed. Of the pre-
sented times, our grasp planner takes about two thirds
(66%) of the total computation time, thus, exchang-
ing GraspIt! with a faster grasp planner would reduce
the total computation time considerably. This eval-
uation should show that our approach with separated
grasp and motion planning is able to find a simulation-
approved collision free trajectory to grasp every tested
object even for a 5 DOF manipulator. In contrast
to other approaches for grasp and motion planning
(Fontanals et al., 2014; Vahrenkamp et al., 2010), our
approach allows to easily exchange all components
such as grasp planner, motion planner or the robot.
CAD-based Grasp and Motion Planning for Process Automation in Fused Deposition Modelling
455

Coming back to the research question established
in Section 4, we can now answer it as follows: Yes, ro-
bust robot-based automation in unloading FDM print-
ers is feasible based on our approach and state-of-the-
art automatic planning algorithms—at least if the ro-
tation of the printed objects is actively controlled or
the robot has a sufficiently large workspace. In the
case of the YouBot, the workspace could be extended
by placing it on its mobile robot base, which poses
new challenges of course, e.g. regarding positioning
accuracy.
6 FUTURE WORK
For our use case, the overall results are sufficient as
computation times were lower than individual pro-
duction times, which allows us to automate object re-
moval. However, we intend to further evaluate the
degree of certainty of the simulation by conducting
more real world experiments.
Furthermore, we would like to evaluate the ap-
plicability of our approach to other domains such as
CNC milling. If the approach is to be transferred
to domains with stricter requirements for computa-
tional time, ERT should be improved to avoid in-
creased hardware requirements. The biggest room
for improvement lies within the generation of feasi-
ble grasps. Therefore, evaluating other grasp planners
or at least multi-threading GraspIt! should be consid-
ered. To the best of our knowledge, there are no ap-
proaches that use a CAD-based ANN for grasp plan-
ning. Consequently, we want to develop one and eval-
uate its performance by comparing it with point cloud
based ANN approaches such as (Staub et al., 2019).
While we expect that improvements in regards to ESP
should be marginal, the computation time is likely to
be reduced. Another possible improvement could be
provided by a grasp planner that is able to take the
object’s and gripper’s geometry into consideration to
produce grasps that form positive connections.
We also expect improvements by employing a
grasp planner capable of considering previous suc-
cessful grasps when generating new ones to increase
the probability of generating a feasible grasp, in turn
also decreasing computation times. As our current
data set of successful grasps is quite small, training
machine learning models for grasp estimation based
on object geometry is not yet feasible. However, con-
tinued use of our setup or validation with GraspIt!
and a simulation will help us create a suitable dataset.
A possible candidate architecture for a machine learn-
ing model is Dex-Net (Mahler et al., 2018), which
already contains a multitude of objects and feasible
grasps for parallel jaw grippers.
Another improvement with regards to grasp plan-
ning would be better handling of the soft gripper with
more contact points and a physics enabled simulation.
To the best of our knowledge, robots with 6 or 7
DoF are more common than those with 5 DoF. Conse-
quently, the effect of the missing DoF should be eval-
uated. We expect it to negatively affect ESP and ERT
since, with an additional DoF, more grasp poses de-
termined by the grasp planning can be reached, hence
resulting in a higher probability and lower computa-
tion times to find successful grasp-motion combina-
tions. Given that CAROL is indeed able to work with
only 5 DoF this can also help further validate our ap-
proach. Additionally, we want to extend CAROL by
the capability to automatically rotate the object and
reiterate grasp and motion planning if a valid motion
could not be found (cf. Figure 3).
7 CONCLUSION
We presented CAROL, an entirely model-based grasp
and motion planning approach to unload a print bed
in FDM-based manufacturing. CAROL successfully
integrates motion planning, grasp planning and a dig-
ital twin in simulation for verification before online
execution. We designed our approach with a focus
on low coupling. Every component is independent of
the others and can therefore be exchanged comfort-
ably without requiring code changes in other com-
ponents. In our evaluation, we have shown that we
are able to find both grasp and motion that were vali-
dated by the simulation for all objects. In preliminary
real world tests, we found that, with a soft gripper, all
pick manoeuvres were successful, although we plan
on expanding these tests in the future as we further in-
tegrate CAROL into our additive manufacturing sce-
nario. However, we note that the computation time
differs between objects. One reason for the arguably
large computation time is that we aim to use a 5 DoF
robot with its kinematic limitations, which are not
easily considered in grasp planning. This leads to the
generation of grasps that are not feasible for the robot
restarting planning until feasible grasps are found.
The grasp planning component GraspIt! takes
about two thirds (66%) of the total computation time.
Thus, we identify the future improvement of this com-
ponent as the most important. However, even now,
grasps are usually found acceptably fast for the appli-
cation in an additive manufacturing setting where in-
dividual production times are high. On standard office
hardware, we can still operate multiple robot printer
setups at once.
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
456

CAROL has three main advantages over vision
guided approaches: (1) higher grasp precision, which
is obtained by utilizing information about the object’s
geometry; (2) no sensory requirements (e. g. camera);
(3) easy adaptability to other domains.
Thus, CAROL provides highly precise grasps as
well as verified collision avoidance for geometrically
complex objects while requiring neither expensive
computing nor complex sensory hardware. In addi-
tion, the simple interchangeability of its major com-
ponents allows for independent further optimization
and adaptation as required in different settings and
target domains.
REFERENCES
Becker, P., Eichmann, C., Roennau, A., and Dillmann, R.
(2020). Automation of post-processing in additive
manufacturing with industrial robots. In 2020 IEEE
16th International Conference on Automation Science
and Engineering (CASE), pages 1578–1583.
Bohg, J. and Kragic, D. (2010). Learning grasping points
with shape context. Robotics and Autonomous Sys-
tems, 58(4):362–377.
Chen, Y., Sun, G., Lin, H., and Chen, S. (2018). Ran-
dom bin picking with multi-view image acquisition
and cad-based pose estimation. In 2018 IEEE Interna-
tional Conference on Systems, Man, and Cybernetics
(SMC), pages 2218–2223.
Depierre, A., Dellandr
´
ea, E., and Chen, L. (2018).
Jacquard: A Large Scale Dataset for Robotic Grasp
Detection. In 2018 IEEE/RSJ International Confer-
ence on Intelligent Robots and Systems (IROS), pages
3511–3516.
Dorn, S., Wolpert, N., and Sch
¨
omer, E. (2020). Voxel-
based General Voronoi Diagram for Complex Data
with Application on Motion Planning. In 2020 IEEE
International Conference on Robotics and Automation
(ICRA), pages 137–143.
Fontanals, J., Dang-Vu, B., Porges, O., Rosell, J., and Roa,
M. A. (2014). Integrated grasp and motion planning
using independent contact regions. In 2014 IEEE-RAS
International Conference on Humanoid Robots, pages
887–893.
Garg, V., Sharma, T., Kumar, A., and Rastogi, V. (2020).
Handaid: A seven DoF Semi-Autonomous Robotic
Manipulator. In 2020 5th International Conference
on Control and Robotics Engineering (ICCRE), pages
37–41.
Gatrell, L. B. (1989). CAD-based grasp synthesis utiliz-
ing polygons, edges and vertexes. In Proceedings,
1989 International Conference on Robotics and Au-
tomation, pages 184–189 vol.1.
Ghalamzan E., A. M., Mavrakis, N., Kopicki, M., Stolkin,
R., and Leonardis, A. (2016). Task-relevant grasp se-
lection: A joint solution to planning grasps and ma-
nipulative motion trajectories. In 2016 IEEE/RSJ In-
ternational Conference on Intelligent Robots and Sys-
tems (IROS), pages 907–914.
Goldfeder, C., Allen, P. K., Lackner, C., and Pelossof, R.
(2007). Grasp Planning via Decomposition Trees. In
Proceedings 2007 IEEE International Conference on
Robotics and Automation, pages 4679–4684.
Gonc¸alves, J. and Lima, P. (2019). Grasp Planning
with Incomplete Knowledge About the Object to
be Grasped. In 2019 IEEE International Confer-
ence on Autonomous Robot Systems and Competitions
(ICARSC), pages 1–6.
G
¨
orner, M., Haschke, R., Ritter, H., and Zhang, J. (2019).
MoveIt! Task Constructor for Task-Level Motion
Planning. In 2019 International Conference on
Robotics and Automation (ICRA), pages 190–196.
Heider, M., P
¨
atzel, D., and H
¨
ahner, J. (2020). Towards
a Pittsburgh-Style LCS for Learning Manufacturing
Machinery Parametrizations. In Proceedings of the
2020 Genetic and Evolutionary Computation Confer-
ence Companion, GECCO ’20, pages 127–128, New
York, NY, USA. Association for Computing Machin-
ery.
Hou, Y., Jia, Z., and Mason, M. T. (2018). Fast Planning
for 3D Any-Pose-Reorienting Using Pivoting. In 2018
IEEE International Conference on Robotics and Au-
tomation (ICRA), pages 1631–1638.
Huang, J., Zhang, F., Dong, X., Yang, R., Xie, J., and
Shang, W. (2020). Vision-guided Dynamic Object
Grasping of Robotic Manipulators. In 2020 IEEE In-
ternational Conference on Mechatronics and Automa-
tion (ICMA), pages 460–465.
Huh, J., Lee, B., and Lee, D. D. (2018). Constrained
sampling-based planning for grasping and manipu-
lation. In 2018 IEEE International Conference on
Robotics and Automation (ICRA), pages 223–230.
Kumra, S. and Kanan, C. (2017). Robotic grasp detec-
tion using deep convolutional neural networks. In
2017 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems (IROS), pages 769–776.
Lee, S. and Lee, Y. (2020). Real-Time Industrial Bin-
Picking with a Hybrid Deep Learning-Engineering
Approach. In 2020 IEEE International Conference
on Big Data and Smart Computing (BigComp), pages
584–588.
Mahler, J., Matl, M., Liu, X., Li, A., Gealy, D., and Gold-
berg, K. (2018). Dex-Net 3.0: Computing Robust
Vacuum Suction Grasp Targets in Point Clouds Using
a New Analytic Model and Deep Learning. In 2018
IEEE International Conference on Robotics and Au-
tomation (ICRA), pages 5620–5627.
Meijer, J., Lei, Q., and Wisse, M. (2017). An empirical
study of single-query motion planning for grasp exe-
cution. In 2017 IEEE International Conference on Ad-
vanced Intelligent Mechatronics (AIM), pages 1234–
1241.
Miller, A. T. and Allen, P. K. (2004). Graspit! a versa-
tile simulator for robotic grasping. IEEE Robotics Au-
tomation Magazine, 11(4):110–122.
Miller, A. T., Knoop, S., Christensen, H. I., and Allen,
P. K. (2003). Automatic grasp planning using shape
CAD-based Grasp and Motion Planning for Process Automation in Fused Deposition Modelling
457

primitives. In 2003 IEEE International Conference
on Robotics and Automation (Cat. No.03CH37422),
volume 2, pages 1824–1829 vol.2.
Nordsieck, R., Heider, M., Angerer, A., and H
¨
ahner, J.
(2019). Towards Automated Parameter Optimisation
of Machinery by Persisting Expert Knowledge. pages
406–413.
Nordsieck, R., Heider, M., Winschel, A., and H
¨
ahner,
J. (2021). Knowledge Extraction via Decentral-
ized Knowledge Graph Aggregation. In 2021 IEEE
15th International Conference on Semantic Comput-
ing (ICSC), pages 92–99.
Noreen, I., Khan, A., Habib, Z., et al. (2016). Optimal
path planning using RRT* based approaches: a sur-
vey and future directions. Int. J. Adv. Comput. Sci.
Appl, 7(11):97–107.
Price, K. V. (1997). Differential evolution vs. the functions
of the 2/sup nd/ ICEO. In Proceedings of 1997 IEEE
International Conference on Evolutionary Computa-
tion (ICEC ’97), pages 153–157.
Quigley, M., Conley, K., Gerkey, B., Faust, J., Foote, T.,
Leibs, J., Wheeler, R., and Ng, A. (2009). ROS: an
open-source Robot Operating System. volume 3.
Rosa, S., Russo, A., Saglinbeni, A., and Toscana, G.
(2016). Vocal interaction with a 7-DOF robotic arm
for object detection, learning and grasping. In 2016
11th ACM/IEEE International Conference on Human-
Robot Interaction (HRI), pages 505–506.
Shintake, J., Cacucciolo, V., Floreano, D., and Shea, H.
(2018). Soft robotic grippers. Advanced Materials,
30(29):1707035.
Staub, B., Tanwani, A. K., Mahler, J., Breyer, M., Laskey,
M., Takaoka, Y., Bajracharya, M., Siegwart, R., and
Goldberg, K. (2019). Dex-Net MM: Deep Grasping
for Surface Decluttering with a Low-Precision Mobile
Manipulator. In 2019 IEEE 15th International Confer-
ence on Automation Science and Engineering (CASE),
pages 1373–1379.
Sucan, I. A., Moll, M., and Kavraki, L. E. (2012). The Open
Motion Planning Library. IEEE Robotics Automation
Magazine, 19(4):72–82.
Tanwani, A. K., Mor, N., Kubiatowicz, J., Gonzalez, J. E.,
and Goldberg, K. (2019). A Fog Robotics Approach to
Deep Robot Learning: Application to Object Recog-
nition and Grasp Planning in Surface Decluttering. In
2019 International Conference on Robotics and Au-
tomation (ICRA), pages 4559–4566.
Vahrenkamp, N., Do, M., Asfour, T., and Dillmann, R.
(2010). Integrated grasp and motion planning. In 2010
IEEE International Conference on Robotics and Au-
tomation, pages 2883–2888.
Yang, Y., Merkt, W., Ivan, V., and Vijayakumar, S.
(2018). Planning in time-configuration space for ef-
ficient pick-and-place in non-static environments with
temporal constraints. In 2018 IEEE-RAS 18th Interna-
tional Conference on Humanoid Robots (Humanoids),
pages 1–9.
Zelch, C., Peters, J., and von Stryk, O. (2020). Learning
control policies from optimal trajectories. In 2020
IEEE International Conference on Robotics and Au-
tomation (ICRA), pages 2529–2535.
Zhang, H., Ichnowski, J., Avigal, Y., Gonzales, J., Sto-
ica, I., and Goldberg, K. (2020). Dex-Net AR: Dis-
tributed Deep Grasp Planning Using a Commodity
Cellphone and Augmented Reality App. In 2020 IEEE
International Conference on Robotics and Automation
(ICRA), pages 552–558.
Zhao, S., Xu, Y., and Tan, Y. (2019). Detecting grasping po-
sitions and postures in 3D point clouds by geometric
constraints. In 2019 IEEE International Conference
on Unmanned Systems (ICUS), pages 443–449.
Zunjani, F. H., Sen, S., Shekhar, H., Powale, A., Godnaik,
D., and Nandi, G. C. (2018). Intent-based Object
Grasping by a Robot using Deep Learning. In 2018
IEEE 8th International Advance Computing Confer-
ence (IACC), pages 246–251.
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
458
