
A Universal Mechanism for Implementing Functional Mock-up Units
Christian Møldrup Legaard
1
, Daniella Tola
1
, Thomas Schranz
2
,
Hugo Daniel Macedo
1
and Peter Gorm Larsen
1
1
DIGIT, Department of Electrical and Computer Engineering, Aarhus University, Aarhus, Denmark
2
Graz University of Technology, Graz, Austria
{hdm, pgl}@ece.au.dk
Keywords:
Co-simulation, Functional Mock-up Interface, Functional Mock-up Unit, Tool.
Abstract:
Producing independent simulation units that can be used in a Functional Mock-Up Interface (FMI) setting
is challenging. In some cases, a modelling tool may be available that provides the exact capabilities needed
by exporting such units. However, there may be cases where existing tools are not suitable, or the cost is
prohibitive, thus it may be necessary to implement a Functional Mock-up Unit (FMU) from scratch. Correctly
implementing an FMU from scratch requires a deep technical understanding of the FMI specification and the
technologies it is built upon. A consequence of FMI being a C-based standard is that an FMU must, generally,
be implemented in C or a compiled language that offers a binary-compatible with C such as C++, Rust, or
Fortran. In this paper we present UniFMU, a tool that makes it possible to implement FMUs in any language,
by writing an adapter that can be plugged in to our modular approach. UniFMU also provides both a graphical
user interface and command-line interface feature for generating new FMUs from a selection of programming
languages. We expect our tool and approach to be useful for the simulation community both when porting
simulators written in languages without FMI support, and when implementing or re-implementing such sup-
port.
1 INTRODUCTION
When modelling Cyber-Physical Systems (CPSs), it
is advantageous to model different parts using differ-
ent formalisms and tools and then combine the dif-
ferent models as simulation units using co-simulation
(Gomes et al., 2018). One of the most popu-
lar standards for co-simulation is called the Func-
tional Mock-up Interface (FMI) (Modelica Associa-
tion, 2019), which defines how different simulators
are coupled and a format for packaging simulation
units. A co-simulation combines a number of such
packaged simulation units, termed Functional Mock-
up Units (FMUs), using a master algorithm that com-
bines the simulation of each of the independent simu-
lation units (Thule et al., 2019a; Thule et al., 2019b)
into a joint simulation of the system.
A common way to obtain FMUs is to use FMI-
enabled modelling tools such as OMEdit (Asghar and
Tariq, 2010), Simulink (Simulink09, 2009) or 20-
sim (Controllab Products B.V., 2013) to create models
interactively using a GUI, which can subsequently be
exported as FMUs. While existing tools may cover
the needs of most modelling applications, the need
for specialized FMUs that can only be implemented
by hand will frequently arise. Unfortunately, the pro-
cess of creating an FMU from scratch is cumbersome
and difficult as it requires:
• A deep understanding of the FMI specification.
• The code to be implemented in a C-compatible
language.
• Cross-compilation to support multiple platforms.
• Manual creation and synchronization of the mod-
elDescription.xml file.
• Correct packaging of assets as an FMU archive.
Due to the many pitfalls of this process, it is impracti-
cal for anyone but experts to produce FMUs by hand.
This paper presents an extendable tool called Uni-
versal Functional Mock-up Unit (UniFMU) that facil-
itates the implementation of FMUs in any program-
ming language. Specifically, our contribution is a tool
that provides:
• Support for Python, C# and Java FMUs out of the
box.
Legaard, C., Tola, D., Schranz, T., Macedo, H. and Larsen, P.
A Universal Mechanism for Implementing Functional Mock-up Units.
DOI: 10.5220/0010577601210129
In Proceedings of the 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2021), pages 121-129
ISBN: 978-989-758-528-9
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
121

• An easy to use extension mechanism to provide
support for any language.
• CLI to generate template FMUs using a single
command.
• Pre-built binaries for Windows, Linux and ma-
cOS, eliminating the need for cross-compilation
and complex tool-chain setup.
• Flexible configuration of the execution environ-
ment, such as running inside a Docker container
or activating a virtual environment.
• A work in progress GUI for modifying FMU’s
modelDescription.xml files, eliminating the need
to modify by hand.
The generated FMUs are fully FMI compliant
meaning they can be used in any FMI enabled
co-simulation tool, without making any modifica-
tions. The tool is freely available and can be ac-
cessed in the GitHub repository: https://github.com/
INTO-CPS-Association/ unifmu/.
We expect our tool and approach to be useful for
the simulation community. As we describe in Sec-
tion 5, by implementing one of two available proto-
cols or using one of our language backends a user
porting simulators written in languages without FMI
support can focus on implementing the FMI standard
functionality in his favourite language. Our work
also lowers the complexity required to modeling tool
providers interested in implementing or improve tools
with FMI export capabilities. With our work the tool
can rely on a modular approach where UniFMU deals
with the C API and the export implementation can fo-
cus on providing the model semantics.
In the following, we provide a brief introduction
to related work in Section 2. Then, Section 3 pro-
vides an introduction to FMI with an emphasis on the
implementation of an FMU from scratch. Next, Sec-
tion 4 demonstrates the alternative implementation fa-
cilitated by UniFMU. Next, Section 5 provides the de-
tails of our approach that may be useful to adopters
interested to generate FMUs using our tool. Follow-
ing this Section 6 describes how UniFMU executes
the authors code inside the FMU as well as how the
tool can be extended to support a new language. Sec-
tion 7 then describes how the generated FMUs can be
ran inside a docker container. Finally, Section 8 pro-
vide a few concluding remarks including the planned
future work.
2 RELATED WORK
The difficulty of authoring FMUs by hand has led to
the development of several tools that support the au-
Table 1: Overview of tools that can: (i) import and simulate
FMUs, (ii) export models as FMUs.
Name Language Import Export
FMUSDK C x x
FMI++ C/C++ x x
FMI4j Java x x
JavaFMI Java x x
JFMI Java x
PythonFMU Python x
PyFMU Python x
OvertureFMU VDM x
thoring of FMUs. Typically, each tool focuses on sup-
porting a specific language and implements its own
workflow. A selection of this type of tool is seen in
Table 1.
A drawback of using language specific tools is that
it requires the user to install and learn how to use sev-
eral different tools. Another issue is that these tools
tend to cover only the most popular languages and/or
languages where interoperability with C is easy to im-
plement.
In addition to tools that allow authoring of FMUs,
some simulation tools allow user written code to be
mixed with the code implemented by FMUs. For ex-
ample (fmp, 2021; Widl et al., 2013) allow FMUs to
be imported and simulated in Python. This makes it
possible to insert additional Python code in the simu-
lation loop, essentially implementing a virtual FMU
without the hassle of packaging. Clearly, this ap-
proach for mixing in code is rather limited in terms
of reuse and the inability to mix different languages
in the simulation. Our tool provides a generic way to
generate FMUs that can be used in any FMI enabled
simulation tool.
More relevant are works that provide a separa-
tion between the FMI C-API and the implementation
of the FMU such Proxy-FMU developed in (Hatledal
et al., 2019). Here, the authors propose using remote
procedure calling (RPC) to allow FMUs to run in a
distributed setting, while at the same time removing
restrictions on the FMUs implementation language. A
further development by the same authors is the fmu-
proxify tool that allows existing FMUs to be wrapped
in a way such that it enables distributed co-simulation
in any FMI enabled simulation tool.
Similar to Proxy-FMU our tool also uses RPC as
a mechanism to enable the execution of arbitrary code
inside an FMU. The main contribution of UniFMU is
that the tool ships with support for several languages
that for which template FMUs can quickly be gener-
ated using the CLI. Another distinction is that our tool
makes it easy to run additional commands like select-
ing a specific virtual environment to run the FMU in-
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
122

side or deploying it in a docker container as described
in section 7.
3 CREATING AN FMU IN C
One of the most difficult and time consuming aspects
of FMI based co-simulation is implementing models
and packaging them as FMUs. In many cases, free
or commercial tools are available that automate the
conversion of the model into an FMU. However, in
practice there are situations where no tool covering
your particular needs exists. For instance consider use
cases where an FMU would need to:
• Capture input from a operator through a GUI.
• Interact with remote hardware.
• Integrate data-driven components such as neural-
networks.
In such cases it may be necessary to implement the
FMU from scratch in C. As a running example we in-
troduce a simple Adder-FMU that takes the sum of its
two inputs to form its output, as shown in fig. 1. We
chose this example to illustrate the effort required to
implement even the simplest FMU from scratch. Ad-
ditionally, we omit details of how to implement many
of the specialized FMI methods, that require careful
considerations to memory management. Hopefully,
this will be enough to convince the reader that creat-
ing a more complex FMU from scratch would be even
more challenging and time consuming.
Adder
a
b
c
Figure 1: Adder FMU computes c = a + b.
To understand the challenges of generating an
FMU we first examine the its structure. In plain terms
an FMU is a zip-archive containing a collection of
files that together define the interface and behavior of
a model. A minimal example of how the contents of
the adder FMU zip folder may look like is depicted in
fig. 2.
The folder must contain the functional behavior
of an FMU, which is realized by a shared library
(unifmu.so) located in the binaries directory (one
for each operating system), and a configuration file,
the modelDescription.xml, stored in the root of
the FMU that provides metadata about the unit. At
runtime, the master algorithm dynamically links the
binary for the specific platform allowing the mas-
ter to invoke the appropriate methods to get and set
adder c.fmu
binaries
linux64
adder.so
windows64
adder.dll
darwin64
adder.dylib
modelDescription.xml
Figure 2: Directory structure of adder’s C implementation.
variables of the model through the C-API. To obtain
this library several methods declared in the FMI’s C-
headers must be implemented in a C compatible lan-
guage and compiled separately for every platform that
the FMU is expected to be run on. A small selection
of these is seen in listing 1.
1 typ ede f str uct
2 {
3 fmi 2Rea l a ;
4 fm i 2R ea l b ;
5 fm i 2R ea l c ;
6 } Adde r ;
7
8 void * fm i2 In s t a n t ia te ( con s t c har *
name ,
9 ...)
10 {
11 Adde r * i n st an c e = ma llo c (. . .) ;
12 ret u rn in st a nc e ;
13 }
14
15 i n t f m i2 Do St ep ( void *c , ... )
16 {
17 Adde r * fmu = c ;
18 f mu -> c = fmu - > a + fmu - >b ;
19 ret u rn fmi 2OK ;
20 }
Listing 1: Implementation of Adder in C.
The code shown in the snippet represents a simpli-
fied implementation of the many details and functions
that must be implemented, and in addition to it we
compile a binary for each architecture including the
FMI standard headers as shown in fig. 3. In addition
to the sheer number of functions that have to be im-
plemented, low-level programming considerations of
memory management and ownership of strings makes
it difficult to implement the functions correctly. This
has been described as one of the challenges of creat-
ing FMUs, as the documentation of the FMI standard
is insufficient (Schweiger et al., 2019; Bertsch et al.,
2014).
The binaries provides the functional behavior of
the model, the modelDescription.xml declares the
A Universal Mechanism for Implementing Functional Mock-up Units
123

fmi2Functions.h
adder.c
compile
adder.so
Figure 3: FMI headers and their implementation compiled
into a shared library.
interface and capabilities of the model. Among other
things, this file declares inputs and outputs of the
model, their type and their default value. This in-
formation is used by the master algorithm to connect
pairs of inputs and outputs of models during the con-
figuration of a co-simulation. It should be stressed
that in the general case the binary itself is oblivi-
ous to the contents of the modelDescription.xml
file. As such special care should be taken to en-
sure that the variables declared in the description are
consistent with the implementation. For example if
one of the inputs to the adder is declared as an in-
teger in the description rather than a floating point
number, the binary would still treat it as a floating
point number leading to an incorrect output value.
We discuss the issue of ensuring consistency of the
modelDescription.xml further in section 8.
4 CREATING AN FMU IN UniFMU
UniFMU provides a Command Line Interface (CLI)
that can be used to author FMUs in several popular
languages such as Python, C# and Java as shown in
Table 2, and we plan to expand the list of supported
languages in the future. We distinguish between a
backend and a language, since one language can im-
plement multiple backends. We define a backend as
the method of communication between the UniFMU
wrapper and the FMU. This is described in more de-
tail in Section 5.
Table 2: List of supported languages and backends, * de-
notes default backend.
Language Backends
Python gRPC*, ZeroMQ
C# gRPC
Java gRPC
The CLI is implemented in Python, but it should
be stressed that the generated FMUs do not depend
on Python during simulation (except for FMUs im-
plemented in Python). The tool can be installed using,
pip, the de-facto package manager for Python, using
a single command:
pip i ns t al l u nif m u
The package manager installs the CLI as well as
any resources needed during the generation and run-
time of the FMUs. Alternatively, the tool can be in-
stalled from source using the instructions found in the
associated GitHub repository
1
.
To generate an FMU you invoke the program
with the sub-command generate with arguments
specifying the language and name of the exported
FMU. For example to generate an FMU named
python adder.fmu in Python the following com-
mand can be used:
uni fmu ge ne rat e pyt h on py th on _a dd er . fmu
Executing this command creates an FMU with the
file structure shown in fig. 4. The generated FMU is
fully functional and serves as a template that can be
modified to implement the desired behavior for the
model.
adder.fmu
binaries
darwin64
linux64
unifmu.so
windows64
resources
model.py
i
backend grpc.py
b
fmi2.py
b
launch.toml
modelDescription.xml
Figure 4: Python FMU directory tree.
b
denotes backend,
i
denotes implementation.
An important difference between an FMU imple-
mented in C and one implemented using UniFMU
is that the behavior of the model is not defined by
the binaries, but rather by the file(s) stored in the
resources folder. This makes it possible to reuse the
same binaries for all FMUs, independently of the lan-
guage that they are implemented in. These binaries
are pre-compiled and shipped with the tool for Linux,
Windows and macOS. Two benefits of this is that the
FMU can run on all platforms without any additional
effort from the author and that it is not necessary to
install a compiler tool-chain.
The model.py file shown in fig. 4 implements the
functionality of the FMU. Inspecting the code inside
of the model.py FMU, the most relevant function is
do step shown in listing 2.
1
https://github.com/INTO-CPS-Association/unifmu
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
124

1 clas s M odel ( Fm i 2F MU ):
2 de f _ _ in it_ _ ( se l f ) :
3 self .a = 0.0
4 self .b = 0.0
5 self . _u pd at e_ o u t p u t s ()
6
7 de f _ up da te _ o u t p ut s ( se l f ) :
8 self .c = sel f . a + s e lf . b
9
10 de f e x i t _i n i t ia l i z at i o n _m o d e (
self ):
11 self . _u pd at e_ o u t p u t s ()
12 re t urn F mi 2 S t at us . ok
13
14 de f do _st ep ( self , ... ) :
15 self . _u pd at e_ o u t p u t s ()
16 re t urn F mi 2 S t at us . ok
Listing 2: model.py implementation.
It contains the addition operation functionality
provided by the FMU, and the variables a and b are
the inputs to the FMU, and the variable c is an output
variable containing the result of the addition of the
two inputs. These variables and their types are all
defined in the modelDescription.xml file.
In addition to the CLI, UniFMU can be launched
as a GUI, seen in fig. 5, using the subcommand:
uni fmu gui
The GUI is currently work in progress, and can
so far be used to access the same functionality as the
CLI. The vision is to extend this GUI to be able to
declare and modify the variables corresponding to the
contents of the modelDescription.xml.
Figure 5: GUI for UniFMU.
5 HOW DOES IT WORK?
The main motivation behind UniFMU is to allow ar-
bitrary code written in any language to be executed
within an FMU. The mechanism used by the tool is
to provide a generic binary that spawns a separate
process for each instantiated slave during runtime.
Unlike the binary, the spawned processes aren’t re-
stricted to the narrow set of compiled languages that
are conventionally used to implement FMUs. This
opens the possibility for using interpreted languages
or languages that rely on a garbage collector to man-
age memory.
In order to forward the FMI calls from the mas-
ter algorithm to the concrete implementation provided
slave processes a remote procedure call (RPC) based
on gRPC
2
is used to pass commands from the binary
to the slave process. Seen from the perspective of the
master algorithm this additional layer of indirection
is totally opaque, meaning that FMUs produced by
the tool can be used in any FMI compliant simulation
tool.
Comparing this with the conventional approach,
we add an extra layer between the master algorithm
and the FMU itself. The comparison between the
conventional and UniFMU approach is illustrated in
fig. 6. In both approaches the master algorithm com-
Master
algorithm
FMU
binary
Master
algorithm
UniFMU
wrapper
FMU slave
C API
RPC
Conventional
FMU
UniFMU
C API
Figure 6: Conventional versus UniFMU approach.
municates with the binary files through the C API that
implements the FMI standard. The difference is that
the UniFMU wrapper ”translates” these C API calls
to messages that can be exchanged through a RPC,
such as gRPC or ZeroMQ. Only one of these two
backends is necessary to implement when supporting
a new language. The specific backend used is defined
in the configuration file of the FMU, as shown in the
launch.toml file in listing 3. In addition to the back-
end, the launch.toml file specifies the command used
to start the backend process. It is possible to spec-
ify different commands based on different OSs, since
they may require a different setup.
1 [grpc]
2 linux = ["python3", "backend_grpc.py"]
3 macos = ["python3", "backend_grpc.py"]
4 windows = ["python", "backend_grpc.py"]
Listing 3: launch.toml.
gRPC. Is a RPC that is based on HTTP/2 for trans-
porting messages, and Protocol Buffers (protobuf)
3
for describing the information in the messages as a
2
https://grpc.io/
3
https://developers.google.com/protocol-buffers
A Universal Mechanism for Implementing Functional Mock-up Units
125
schema. An example of the DoStep schema, defined
in the protobuf file, is illustrated in listing 4.
1 se r vi c e Se nd Co mm an d {
2 rp c F m i 2 Do St ep ( DoS tep )
3 re tur ns ( S t a t u s Re tu rn ) {}
4 }
5 me s sa g e DoS t ep {
6 do u ble c ur re nt _t im e = 1;
7 do u ble s te p _s iz e = 2;
8 bool no _s te p_ p r i o r = 3;
9 }
Listing 4: Structure of DoStep message and Fmi2DoStep
call in protobuf schema.
ZeroMQ. ZeroMQ
4
is a networking library that al-
lows messages to be transmitted efficiently across
transport layers such as TCP or as Inter Process Com-
munication. Unlike the gRPC backend there is no
explicit schema-file that dictates the structure of the
messages. Instead, the messages are structured ac-
cording to a simple protocol described in the devel-
oper documentation found in the UniFMU repository.
The serialization of the messages is performed by the
Serde
5
library. This makes it possible to automati-
cally generate high-performance serialization for sev-
eral formats such as:
• JSON
• Pickle
• Flatbuffers
For dynamically typed languages such as Python or
JavaScript the schemaless approach may be simpler
to implement.
The main difference between these two backends
is that gRPC uses a protobuf schema, while ZeroMQ
is schemaless. Using a schema to define the messages
and calls between the UniFMU wrapper and the FMU
allows to declare the types of each message. This re-
duces the risk of using incorrect types when imple-
menting the functions, easing the process of creating
FMUs in statically-typed languages.
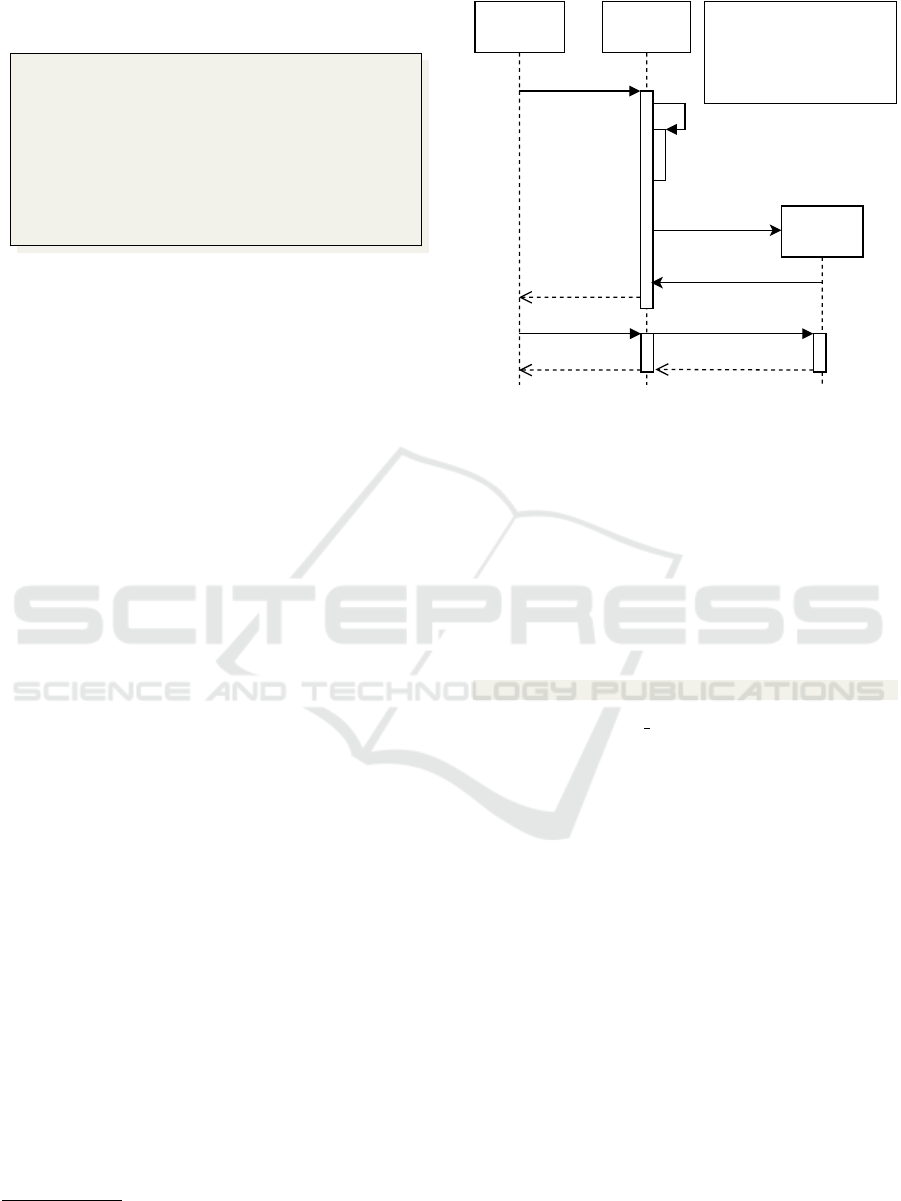
To understand the flexibility of this approach, it is
useful to examine the process for creating an instance
of an FMU, and the forwarding of the FMI commands
from the binary to the slave instance, as depicted in
fig. 7.
First the master algorithm invokes the
fmi2Instantiate function defined by the binary.
Following this, the wrapper reads the launch.toml
file, which is present in any FMU generated by
UniFMU. This is the configuration file which defines
4
https://zeromq.org/
5
https://serde.rs/
:unifmu.so
read launch.toml
:Master
slave started
:slave 1
python3
backend_grpc.py
fmi2Ok
fmi2Instantiate
[command.Grpc]
linux=["python3", "backend_grpc.py"]
macos = ...
windows = ...
fmi2EnterInitalizationMode fmi2EnterInitalizationMode
Figure 7: Instantiation of slave and forwarding of FMI
method calls.
the details about which communication backend is
used to communicate with the slave process and
even more importantly the specific command used
to spawn the process. The launch.toml file in fig. 7
shows how the commands defined in the file are used
to instantiate a Python FMU. For example an FMU
implemented in Python using the gRPC backend
would use the following command to launch the slave
process:
pyt ho n 3 ba ck en d_ gr pc . py
Here the backend grpc.py script serves as an im-
plementation by implementing the Fmi2DoStep com-
mand, defined in the protobuf schema shown in list-
ing 4. The DoStep message declares the parameters
used in the Fmi2DoStep command. The complete
protobuf schema can be found in our GitHub repos-
itory.
6 HOW TO EXTEND SUPPORT
TO A NEW LANGUAGE?
There may be cases where a user would like to imple-
ment an FMU in a language not yet supported by the
tool. One of the advantages of UniFMU is that new
languages can be added without making any modifi-
cation to the binaries of the FMU. This section shows
the steps followed to extend the UniFMU support to
include C# by implementing a gRPC backend. We
chose the gRPC option, because a schema based se-
rialization format like the one used by gRPC is es-
pecially suitable for compiled languages as it allows
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
126

messages to be constructed using strongly typed ob-
jects. Following our running example, we will use the
adder introduced in section 3 as a concrete example.
The implementation of the gRPC backend in C#
amounts to implement the remote procedure calls de-
fined in unifmu fmi2.proto file under schemas in the
repository
6
. The protobuf compiler, protoc, is then
used to compile the UniFMU protobuf schema into
C# code, as illustrated in fig. 8.
unifmu_fmi2.proto protoc
UnifmuFmi2.cs
...
Figure 8: Generate C# files containing the protobuf schema.
The next steps are to create a base class of the
FMI2 functions and implement the functionality of
the adder. This can easily be done by translating these
implementations from Python to C# code. The adder
derives functions from the FMI2 base class, thus the
specific implementations of the FMI2 functions are
implemented in each FMU. After this, the gRPC
server is coded, implementing the functions that were
generated from the protobuf schema and calling them
on the adder. A snippet of the Fmi2DoStep function
implementation in the gRPC server is shown in ??.
1 pub lic ov er rid e Task < S t at u sRe tur n >
2 F m i2 Do St ep ( DoS tep request ,.. . )
3 {
4 F m i2 St at us st a tu s =
5 this . fmu . D o St e p (
6 re que st . C urr ent T ime ,
7 re que st . S t epSize ,
8 re que st . No St ep P r i o r ) ;
9 .. .
10 }
Listing 5: gRPC server implementation of Fmi2DoStep.
The Fmi2doStep implementation is the only nec-
essary function to implement in the adder, since this
is where the core functionality is described. Listing 6
shows the Fmi2doStep implementation of the adder.
6
https://github.com/INTO-CPS-Association/unifmu/
1 pub lic ov er rid e Fm i2 S t a tu s DoS t ep (
2 do u ble cu r ren tTi m e , ...)
3 {
4 this .c = thi s . a + t h is . b ;
5 re t urn F mi 2 S t at us . Ok ;
6 }
Listing 6: C# example of fmi2doStep implementation.
One of the last steps is to implement the hand-
shake connection that will be performed between the
UniFMU wrapper and the FMU itself. This can be
done in the backend grpc.cs file, where the specific
FMU to initialize can also be defined. The last step is
to define the commands to be called for initialization
of the FMU in the launch.toml file.
When generating a new C# FMU, the file structure
will be as illustrated in fig. 9, where the adder.cs file
can be exchanged for any other C# file.
adder csharp.fmu
binaries
resources
schemas
model.cs
i
backend grpc.cs
b
fmi2.cs
b
csharp.csproj
launch.toml
modelDescription.xml
Figure 9: C# FMU directory tree.
b
denotes backend,
i
denotes implementation.
As we have demonstrated in this section, there is
no need to write any C/C++ code when creating a new
backend for UniFMU. The work amounts to imple-
ment a gRPC server using the protobuf schema and
an abstract class containing the FMI2 function decla-
rations.
7 EXECUTING FMUs INSIDE
DOCKER CONTAINER
Invoking code from within an FMU needs the host
machine to provide the necessary runtime environ-
ment to do so. For example, running python scripts re-
quires that the host machine has a compatible python
interpreter and all libraries used in the scripts in-
stalled. This limits the portability of the FMUs, espe-
cially when shared between different host machines,
potentially running different operating systems.
To mitigate this issue runtime dependencies can
be packaged into a virtualization environment such
A Universal Mechanism for Implementing Functional Mock-up Units
127
as docker
7
. A detailed description of the extension
and more advanced topics, such as remote deploy-
ment, building and deployment settings can be found
in (Schranz et al., 2021). In essence, to dockerize
there is no need to change the wrapper code, all of the
necessary actions are performed using a short script
(run.sh for unix, run.ps1 for Windows), as seen in
Listing ??. The script builds a docker image using
the FMUs global unique identifier and runs it. Once
the wrapper disconnects, the process terminates, the
container is stopped and disposed. The actions within
the Dockerfile depend on the choice of backend. An
adaptation to the framework to support all backends
is under development.
To dockerize the FMU, the commands given in the
launch.toml can be set to run a shellscript:
1 [grpc]
2 linux = ["/bin/bash", "run.sh" ]
3 macos = ["/bin/bash", "run.sh" ]
4 windows = ["powershell", ".\\run.ps1"]
1 # !/ bin / sh
2 . . .
3 # buil d i mag e
4 doc ker bui l d -t "$uid " .
5 # ru n co nt ai n er
6 doc ker run -- net = h o st - - rm .. .
Listing 7: Shell script, run.sh, used to deploy docker con-
tainer on unix.
8 CONCLUDING REMARKS AND
FUTURE WORK
In this paper we have introduced the tool UniFMU
that makes it possible to implement FMUs in several
languages with built-in support by the tool. We have
demonstrated the process of creating an FMU in a
supported language, Python, and have demonstrated
the process for extending the tool to support C#.
This makes it possible to produce FMUs with limited
knowledge of the internal workings and with limited
knowledge of C. In the future we hope to be able to
use a similar Java extension to enable the Overture
FMU (Thule et al., 2018) export to be moved over
to the Visual Studio Code VDM substantiation (Rask
et al., 2020).
One issue not discussed in the paper is perfor-
mance. Invoking functions of an FMU using RPC in-
stead of calling them directly through the C-ABI in-
curs a performance cost. As part of (Hatledal et al.,
7
https://www.docker.com/
2019) the authors provide the results of experiments
where the total simulation time of multiple FMUs is
measured for the two approaches. The results seem
to indicate that there is an almost constant overhead
per RPC call resulting in the largest impact on mod-
els that must be simulated with small step sizes. A
possible way to reduce the performance overhead is
to reduce the total number of RPC calls. For example
several FMI calls made in between two fmi2DoStep
calls could be grouped and sent as a single message,
since the outputs would not change in between.
UniFMU provides a way to package and execute
arbitrary code inside of an FMU. However, it does not
directly provide a way to ensure consistency between
the model description and the code. Other works
like (Legaard et al., 2020; Hatledal et al., 2020) solve
this issue by declaring the interface in the implemen-
tation of the FMU and using code generation targeted
for specific languages to export the model descrip-
tion. This approach cannot readily be applied for a
large number languages without implementing with-
out implementing code generation for each language
individually. There is a work in progress GUI, where
it is possible to import the FMU, and using the editor
manage the input and output variables of the model
description, as shown in fig. 5.
In addition to the standalone GUI for the tool, it is
possible to bundle the offering in the INTO-CPS As-
sociation services, for instance in the front-end used
to setup and launch co-simulations using MAESTRO,
the INTO-CPS Application (Macedo et al., 2020; Ta-
lasila et al., 2020). It is also a possibility to enable
the Model-Based Design of Cyber-Physical Systems
community to use and make the tool available in the
HUBCAP project cloud platform (Larsen et al., 2020;
Kulik et al., 2020).
ACKNOWLEDGEMENTS
We acknowledge the funding from the Poul Due
Jensen Foundation for funding the project Digital
Twins for Cyber-Physical Systems (DiT4CPS).
REFERENCES
(2021). CATIA-Systems/FMPy. CATIA Systems.
Asghar, S. A. and Tariq, S. (2010). Design and implemen-
tation of a user friendly OpenModelica graphical con-
nection editor. page 81.
Bertsch, C., Ahle, E., and Schulmeister, U. (2014). The
Functional Mockup Interface – seen from an industrial
perspective. pages 27–33.
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
128

Controllab Products B.V. (2013). http://www.20sim.com/.
20-sim official website.
Gomes, C., Thule, C., Broman, D., Larsen, P. G., and
Vangheluwe, H. (2018). Co-simulation: a Survey.
ACM Comput. Surv., 51(3):49:1–49:33.
Hatledal, L., Zhang, H., and Collonval, F. (2020). Enabling
python driven co-simulation models with pythonfmu.
pages 235–239.
Hatledal, L. I., Styve, A., Hovland, G., and Zhang,
H. (2019). A Language and Platform Independent
Co-Simulation Framework Based on the Functional
Mock-Up Interface. IEEE Access, 7:109328–109339.
Hatledal, L. I., Styve, A., Hovland, G., and Zhang,
H. (2019). A Language and Platform Independent
Co-Simulation Framework Based on the Functional
Mock-Up Interface. IEEE Access, 7:109328–109339.
Conference Name: IEEE Access.
Kulik, T., Macedo, H. D., Talasila, P., and Larsen, P. G.
(2020). Modelling the HUBCAP Sandbox Architec-
ture In VDM – a Study In Security. In Fitzgerald, J. S.
and Oda, T., editors, Proceedings of the 18th Interna-
tional Overture Workshop, pages 20–34. Overture.
Larsen, P. G., Macedo, H. D., Fitzgerald, J., Pfeifer, H.,
Benedikt, M., Tonetta, S., Marguglio, A., Gusmeroli,
S., and Jr., G. S. (2020). An Online MBSE Collabo-
ration Platform. pages 263–270. INSTICC, Proceed-
ings of the 10th International Conference on Simula-
tion and Modeling Methodologies, Technologies and
Applications - Volume 1: SIMULTECH.
Legaard, C. M., Gomes, C., Larsen, P. G., and Foldager,
F. F. (2020). Rapid Prototyping of Self-Adaptive-
Systems using Python Functional Mockup Units.
SummerSim ’20. ACM New York, NY, USA.
Macedo, H. D., Rasmussen, M. B., Thule, C., and Larsen,
P. G. (2020). Migrating the INTO-CPS Application
to the Cloud. In Sekerinski, E., Moreira, N., Oliveira,
J. N., Ratiu, D., Guidotti, R., Farrell, M., Luckcuck,
M., Marmsoler, D., Campos, J., Astarte, T., Gonnord,
L., Cerone, A., Couto, L., Dongol, B., Kutrib, M.,
Monteiro, P., and Delmas, D., editors, Formal Meth-
ods. FM 2019 International Workshops, pages 254–
271, LNCS 12233. Springer-Verlag.
Modelica Association (2019). Functional Mock-up Inter-
face for Model Exchange and Co-Simulation. https:
//www.fmi-standard.org/downloads.
Rask, J. K., Madsen, F. P., Battle, N., Macedo, H. D., and
Larsen, P. G. (2020). Visual Studio Code VDM Sup-
port. In Fitzgerald, J. S. and Oda, T., editors, Pro-
ceedings of the 18th International Overture Workshop,
pages 35–49. Overture.
Schranz, T., Alfalouji, Q., Falay, B., Legaard, C., Wilfling,
S., and Schweiger, G. (2021). Coupling physical and
machine learning models: Case study of a residential
building. In 14th International Modelica Conference
(Submitted Manuscript).
Schweiger, G., Gomes, C., Engel, G., Hafner, I., Sch
¨
oggl,
J.-P., Posch, A., and Nouidui, T. (2019). Functional
Mock-up Interface: An empirical survey identifies re-
search challenges and current barriers.
Simulink09 (2009). Simulink - Sim-
ulation and Model-Based Design.
http://www.mathworks.com/products/simulink/.
Talasila, P., Sanjari, A., Villadsen, K., Thule, C., Larsen,
P. G., and Macedo, H. D. (2020). Introducing Test
Driven Development and Upgrades to the INTO-CPS
Application. In Cleophas, L. and Massink, M., editors,
Software Engineering and Formal Methods. SEFM
2020 Collocated Workshops, pages 311–317, Cham.
Springer International Publishing.
Thule, C., Lausdahl, K., Gomes, C., Meisl, G., and Larsen,
P. G. (2019a). Maestro: The INTO-CPS co-simulation
framework. Simulation Modelling Practice and The-
ory, 92:45–61.
Thule, C., Lausdahl, K., and Larsen, P. G. (2018). Over-
ture FMU: Export VDM-RT Models as Tool-Wrapper
FMUs. In Pierce, K. and Verhoef, M., editors, The
16th Overture Workshop, pages 23–38, Oxford. New-
castle University, School of Computing. TR-1524.
Thule, C., Palmieri, M., Gomes, C., Lausdahl, K., Macedo,
H. D., Battle, N., and Larsen, P. G. (2019b). To-
wards Reuse of Synchronization Algorithms in Co-
simulation Frameworks. In Co-Sim-19 workshop.
Widl, E., M
¨
uller, W., Elsheikh, A., H
¨
ortenhuber, M., and
Palensky, P. (2013). The FMI++ library: A high-
level utility package for FMI for model exchange.
In 2013 Workshop on Modeling and Simulation of
Cyber-Physical Energy Systems (MSCPES), pages 1–
6.
A Universal Mechanism for Implementing Functional Mock-up Units
129
