
DOP and Pseudorange Error Estimation in Urban Environments
for Mobile Android GNSS Applications
Przemyslaw Falkowski-Gilski
a
and Zbigniew Lubniewski
b
Faculty of Electronics, Telecommunications and Informatics, Gdansk University of Technology,
Narutowicza 11/12, Gdansk, Poland
Keywords: Mobile Devices, Outdoor Positioning, Smartphone-based Positioning, Wireless Positioning.
Abstract: Just a couple of years ago, GNSS (Global Navigation Satellite Systems) were available only for a narrow
group of users. Currently, with the outbreak of mobile devices, they are accessible to anyone and everywhere.
Urban navigation or searching for POIs (Points of Interest) had become an everyday activity. With the
availability of consumer electronics and wireless technologies, each user can obtain information considering
his or her location even in an unknown environment. Additionally, network operators and service providers
utilize this location-based information for monitoring and maintenance purposes. This paper is focused on a
study, considering the DOP (Dilution of Precision) and pseudorange error estimation in case of Android-
powered smartphones operating outdoors. It describes a measurement campaign, carried out in varying urban
environments, with two types of excursions (by car and bicycle), including two popular consumer devices
from different manufacturers. Based on this, respective conclusions and remarks are given. This work aims
to aid not only users, but also application developers as well as device manufacturers and retailers, when it
comes to providing precise and reliable products and services.
1 INTRODUCTION
Nowadays, there is a wide group of GNSS (Global
Navigation Satellite Systems) operating around the
world. They utilize artificial satellites, constantly
generating signals and transmitting them to the
surface of the Earth. Mobile devices, particularly
smartphones with a complex set of wireless modules,
enable to take advantage of a number of available
national and international systems, including: GPS
(USA), GLONASS (Russia), Galileo (Europe/EU),
BeiDou (China), NAVIC (India), and QZSS (Japan)
(Quan, Lau, Roberts and Meng, 2016; Teunissen and
Montenbruck, 2017). A brief description of GNSS,
including utilized frequency band, is described
in Table 1.
It seems that the variety of GNSS-based
applications is unlimited. Currently, they are utilized
in e.g. forwarding and logistics, aerial, road and sea
transport, personal motorized and pedestrian
navigation, searching for POI (Point of Interest), etc.
Particularly, users rely on them in urban
a
https://orcid.org/0000-0001-8920-6969
b
https://orcid.org/0000-0002-2821-1980
environments, especially at unknown locations.
It is worth mentioning that currently every mobile
device has an integrated circuit, responsible for
processing GNSS signals (Gilski and Stefański, 2015;
Chruszczyk, 2017).
Due to the popularity and widespread of portable
devices, it seemed interesting to investigate the
precision that modern smartphones can offer.
Particularly, what is the accuracy of satellite
positioning and navigation systems for urban
mobility applications. That is why this study,
concerning Android-powered terminals, was carried
out.
2 MOBILE CONSUMER
DEVICES
Due to the technological development, mobile
terminals have evolved into functionally-
sophisticated devices, such as smartphones.
Falkowski-Gilski, P. and Lubniewski, Z.
DOP and Pseudorange Error Estimation in Urban Environments for Mobile Android GNSS Applications.
DOI: 10.5220/0010719300003058
In Proceedings of the 17th International Conference on Web Information Systems and Technologies (WEBIST 2021), pages 629-638
ISBN: 978-989-758-536-4; ISSN: 2184-3252
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
629

The Android platform is currently the most popular
operating system worldwide.
Table 1: Modern GNSS satellite systems.
No. Name Frequency band
1 GPS 1.563–1.587 GHz (L1)
1.215–1.2396 GHz (L2)
1.164
–
1.189 GHz
(
L5
)
2 GLONASS 1.593–1.610 GHz (G1)
1.237–1.254 GHz (G2)
1.189
–
1.214 GHz
(
G3
)
3 Galileo 1.559–1.592 GHz (E1)
1.164–1.215 GHz (E5a/b)
1.260
–
1.300 GHz (E6)
4 BeiDou 1.561098 GHz (B1)
1.589742 GHz (B1-2)
1.20714 GHz (B2)
1.26852 GHz
(
B3
)
5 NAVIC 1.17645 GHz(L5)
2.492028 GHz
(
S
)
6 QZSS 1.57542 GHz (L1-C/A)
1.57542 GHz (L1C)
1.2276 GHz (L2C)
1.17645 GHz (L5)
1.57542 GHz (L1-SAIF)
1.27875 GHz (LEX)
As handheld devices become more popular,
the role of an operating system grows significantly.
Current Android-powered devices are full of
integrated hardware, including IMUs (Inertial
Measurement Units) such as cameras, gyroscopes,
accelerometers, as well as various wireless interfaces,
containing a build-in cellular and GNSS receiver.
This OS enables third-party applications to make use
of these hardware features and provides a suitable
user environment (Gilski and Stefański, 2016).
2.1 Programming Android Terminals
As learning mobile programming becomes an
increasingly sought after and valued skill, primary,
secondary, as well as higher education institutions
aim at designing and developing courses, books and
related supplementary learning resources
(Hendikawati, Zahid and Arifudin, 2019a), along
with modern ICT (Information and Communication
Technologies) tools (Hendikawati, Zahid and
Arifudin, 2019b).
In (Prabowo, Rahmawati and Anggoro, 2019)
authors developed an Android-based application for
teaching junior high-school mathematics, integrated
with a popular social-media platform, namely
WhatsApp. Whereas, in (Hendikawati, Arifudin and
Zahid, 2018) authors developed a computer-assisted
application for statistical data analysis, also related to
education and learning purposes.
In (de Oliveira, de Oliveira, Ramalho and Viana,
2016) authors assessed the performance of mobile
messaging, under various research scenarios,
including different distributions of the Android OS,
mobile devices, as well as wireless network access
technologies.
Android itself, as an open environment, is a
member of the Linux family. The difference between
the Android and Linux kernel, runtime environment,
security and privacy risks, etc., is discussed in (Khan
and Shahzad, 2015). Whereas, the matter of mobile
security is further analyzed in (Ul Abideen, Ali Tariq,
Shah Talha Naqash and Qaseem, 2018).
As shown, the Android operating system,
and related consumer devices, are utilized for a
number of purposes, even in testing and monitoring
electrical components of machines. The matter of
such an IoT (Internet of Things) system, as an
element of the Industry 4.0 concept, is described
in (Sharmilah et al., 2019).
2.2 Positioning Accuracy
The positioning accuracy of a GNSS system may be
evaluated in a number of ways. The most popular one
is based on CNR (Carried-to-Noise-Ratio), usually
expressed in dBHz (Cisco, 2012). Another approach
is related to the number of observed and monitored
satellites, including the DOP (Dilution of Precision)
coefficient, related to the geometry of the
constellation, and its impact on precision (Langley,
1999). The DOP can be defined in a number of
variants:
GDOP (Geometric DOP) – related to the
positioning accuracy in 4 dimensions
(space and time).
HDOP (Horizontal DOP) – related to the
positioning accuracy in the horizontal plane.
VDOP (Vertical DOP) – related to the
positioning accuracy in the vertical plane
(height).
TDOP (Time DOP) – related to the accuracy of
time measurements.
PDOP (Position DOP) – related to positioning
accuracy in 3 spatial dimensions.
Generally speaking, the lower the value,
the higher the reliability (confidence) of positioning
calculations. However, when DOP is close to or equal
to zero, obtaining a position is not possible, due to too
low signal level or severe interference. Whereas,
when it reaches a threshold of 20 and above,
QQSS 2021 - Special Session on Quality of Service and Quality of Experience in Systems and Services
630

the signal quality does not provide reliable measures
as well.
Before 2016, Android-powered devices, up to
Android Marshmallow 6.0, had limited access to
navigation and/or positioning data. At that time,
the API (Application Programming Interface)
enabled to access basic information concerning the
satellite’s azimuth, elevation, SNR (Signal-to-Noise
Radio), PVT (Position, Velocity and Time), status of
the chipset (active or inactive), latitude and longitude
data, estimated positioning accuracy (in meters),
as well as NMEA (National Marine Electronics
Association) data. This enabled a positioning
accuracy of a couple of meters (most often 2-3 m).
Since 2017, the newly introduced version of
Android, called Nougat (7.0), enabled to utilize raw
positioning data (GSA, 2017). From then developers
were able to use a set of dedicated additional classes
and related methods in order to design more precise
software, including information about the GNSS
clock (for pseudorange error calculation purposes),
how to decode incoming bits from available satellite
constellations, as well as the time, code and phase of
a particular carrier from a given satellite, not to
mention the Doppler shift.
Further improvements included integrating the
PPP (Precise Point Positioning) technique
(Laurichesse, Rouch, Marmet and Pascaud, 2017),
as well as sensor fusion, together with the mobile
device’s build-in light and pressure sensor,
IMU (Inertial Measurement Unit), accelerometer,
gyroscope, magnetometer, etc. Recent studies related
to the subject of mobile positioning are available
in (Specht, Szot, Dąbrowski and Specht, 2020;
Su, Jin and Jiao, 2020; Guo et al., 2020; An, Meng
and Jiang, 2020).
3 ABOUT THE STUDY
The study was carried out using two mobile devices,
particularly smartphones. They came from different
manufacturers, and are further labeled as Smartphone
1 and Smartphone 2.
The first one had a 8-core CPU (2.2 GHz),
3 GB of RAM, a 3000 mAh battery, and was powered
by Android Pie (9.0). The integrated GNSS module
was compatible with GPS, GLONASS, Galileo,
BeiDou, and QZSS.
The second device had also a 8-core CPU
(2.3 GHz), 4 GB of RAM, 4000 mAh battery, and was
powered by Android Pie (9.0) as well. The integrated
GNSS module was compatible with GPS,
GLONASS, Galileo, and BeiDou.
All obtained data were recorded in the raw format,
and then processed using the GNSS Measurement
Tool as well as Matlab software. During both
measurement and processing, we utilized our custom
software, in order to obtain as much data as possible.
The measurement campaign included 2 types of
routes (square-shaped and straight line), 2 types of
communication means (bicycle – low speed, car –
high speed), and of course 2 smartphones.
4 RESULTS
In the first scenario, the route resembled a square,
as shown in Figure 1. Whereas in the second one,
the route resembled a straight line, as shown
in Figure 2. Both routes were evaluated with a bicycle
at an average speed of 8 km/h, and a car at average
speed of 35 km/h. This route went along 3 streets
(Twarda, Chwaszczyńska, and Okrąg) in the city of
Gdańsk. It varied in type of structure and its closest
neighborhood. Some part of it was surrounded by
buildings, and some of it was next to an open terrain.
Figure 1: Layout of the square-shaped route.
Figure 2: Layout of the straight line route.
To start with, obtained results will be described
taking into consideration the type of route (square-
shaped and straight line), type of mobility (bicycle
and car), and utilized smartphone (Smartphone 1 and
Smartphone 2). Next, obtained results will be
compared and discussed.
DOP and Pseudorange Error Estimation in Urban Environments for Mobile Android GNSS Applications
631
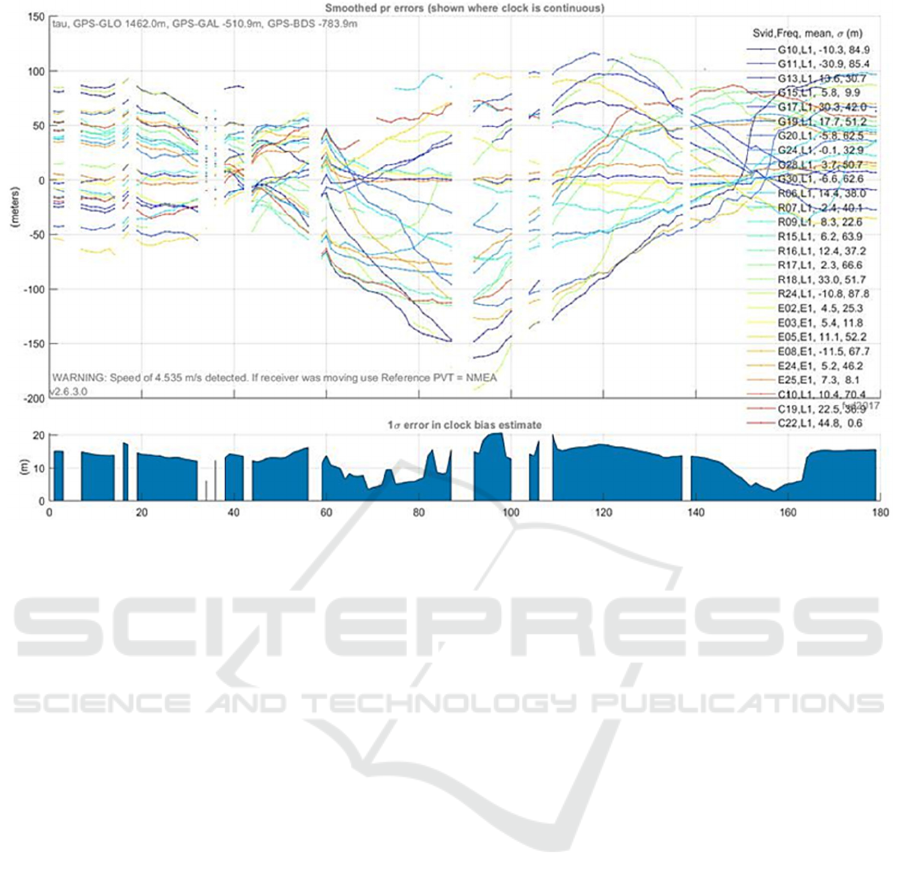
Figure 3: Pseudorange error – bike excursion along the square-shaped route with Smartphone 1.
4.1 Square-shaped Route: Bicycle
Excursion with Smartphone 1
The HDOP value, for the GPS constellation,
was close to approx. 1 in case of 7-10 observed
satellites. When the number of satellites decreased,
the HDOP value rose to approx. 2. In case of the
GLONASS system the number of observed satellites
dynamically changed between 5-8 satellites, whereas
HDOP ranged between 0.8-1.56. The clock drift did
fluctuate, with a maximum value of approx.
0.03 ppb/s.
The signal with the strongest CNR was observed
for satellite C27 from the BeiDou constellation.
This satellite, like C28 and C22, was observed only
in the first few seconds of measurement. The signal
strength from other BeiDou satellites was equal to
approx. 20-25 dBHz. However, those signals had a
big pseudorange error (from -6 to 4 m), and were not
correlated to the estimated frequency clock.
The signal strength itself was unstable.
The pseudorange error did exceed 50 m,
especially at the crossroad of Twarda and
Chwaszczyńska streets. To sum up, 95% of the
pseudarange error was less than 59.6 m. The WLS
(Weighted Least Squares) error was equal to 15.1 m
(see Figure 3). This route runs between buildings only
in some part. That is why the impact of multipath
propagation was not significant. Furthermore,
the terrain topology also had an impact on obtained
accuracy, as the height difference ranged between
0-4 m above sea level.
4.2 Square-shaped Route: Bicycle
Excursion with Smartphone 2
The absolute value of the clock drift was equal to
0.01 ppb/s. Most of the observed satellites had good
geometry. In case of GPS the HDOP value oscillated
around 0.9-1.2, whereas for GLONASS it reached
1-2.25.
The horizontal and vertical error, calculated based
on WLS, oscillated around 0.0-0.7 m. However,
this was not close to real values. According to
obtained results, the amplitude of height reached
100 m, which is a huge error, as the real value was
equal to approx. 4 m along the whole route
Obtained pseudorange errors were unconcise.
They changed from positive to negative (see
Figure 4). This clearly showed that positioning
accuracy was low. Higher Doppler shifts were
observed for GLONASS. It should be pointed out that
BeiDou and Galileo satellites were not monitored
during most of the time. Biases in the clock itself had
a significant impact as well.
QQSS 2021 - Special Session on Quality of Service and Quality of Experience in Systems and Services
632
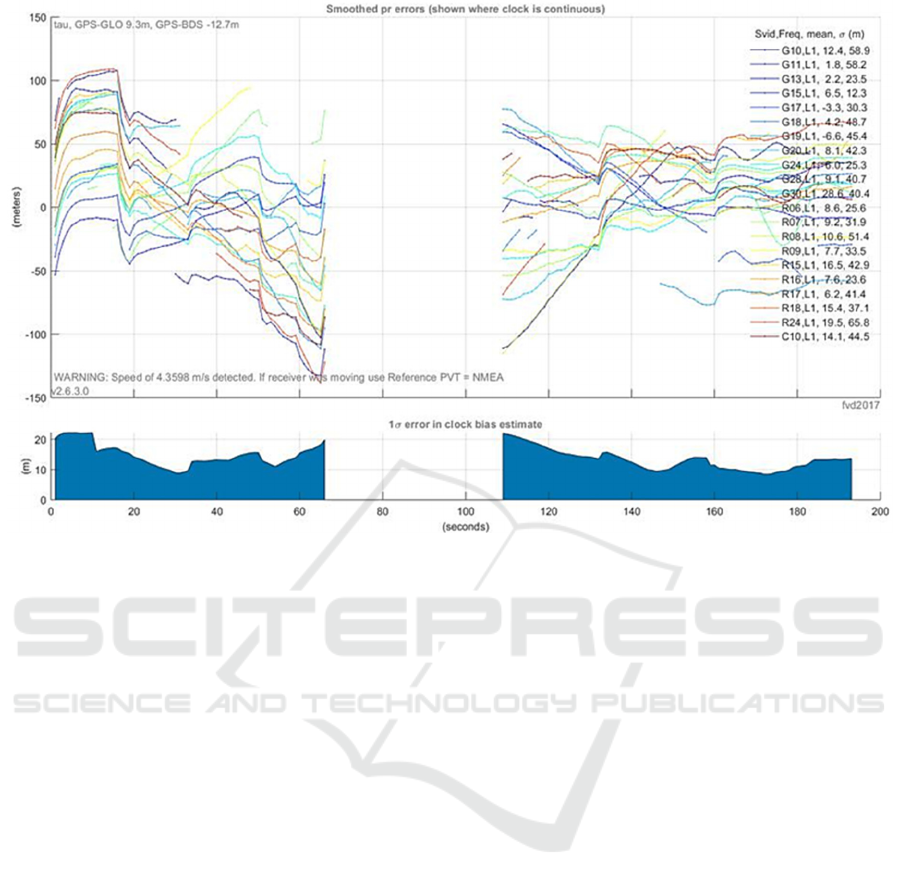
Figure 4: Pseudorange error – bike excursion along the square-shaped route with Smartphone 2.
4.3 Square-shaped Route: Car
Excursion with Smartphone 1
The HDOP value for GPS was equal to approx. 1,
and reached 2 when the number of satellites shrank
to 4. In case of GLONASS, this parameter oscillated
from 1 to even 5. During approx. half of the time, the
clock was not concise, resulting in a discontinuous
time of satellite observation, especially in case of
BeiDou and Galileo. Not surprising, the strongest
signal was observed when driving in open terrain (the
number of observed satellites was also higher).
During the measurement campaign, the clock was not
stable. Moreover, a frequency drift was observed,
equal to 0.18 ppb/s, with a stable clock bias.
The pseudorange error for GPS and GLONASS
oscillated from -50 to 50 m (see Figure 5).
When driving in open space, additional Galileo and
BeiDou signals were observed. The highest
pseudorange error was observed when the car was in
the so-called urban canyon.
The WLS estimation was quite precise, especially
in the second part of the drive test. At first even
deviations of few meters were observed. During the
first 52 s the vertical position was calculated with
huge error (exceeding 5 m). Whereas, for the next
40 s, the accuracy was noticeably higher. However,
at the end it reached 50 m. When utilizing WLS on
raw data, we obtained more accurate results.
The average vertical position was approx. at 0 m,
whereas 50% of obtained samples resulted in 6.3 m
and less.
4.4 Square-shaped Route: Car
Excursion with Smartphone 2
In case of GPS the HDOP value oscillated around
approx. 0.9-1.5, whereas in case of GLONASS it did
not exceed 1.6. The clock was continuous, with a drift
of -0.06 ppb/s. The clock shift was getting higher in a
linear scale.
The pseudorange error, for most cases (95%)
did not exceed 28.7 m. When the car drove among
buildings, this error reached to approx. 100 m
(see Figure 6). The highest Doppler shifts were also
observed for G07 and G08 (30-50 s and 90-100 s),
where the observed multipath effect was the
strongest.
Results obtained using WLS were quite good.
The horizontal error was less than 9.7 m for 50% of
obtained samples, and less than 20.8 m for 95% of
samples. The vertical error was less than 23.4 m for
50% of samples, and less than 44.6 m for 95% of
samples.
DOP and Pseudorange Error Estimation in Urban Environments for Mobile Android GNSS Applications
633
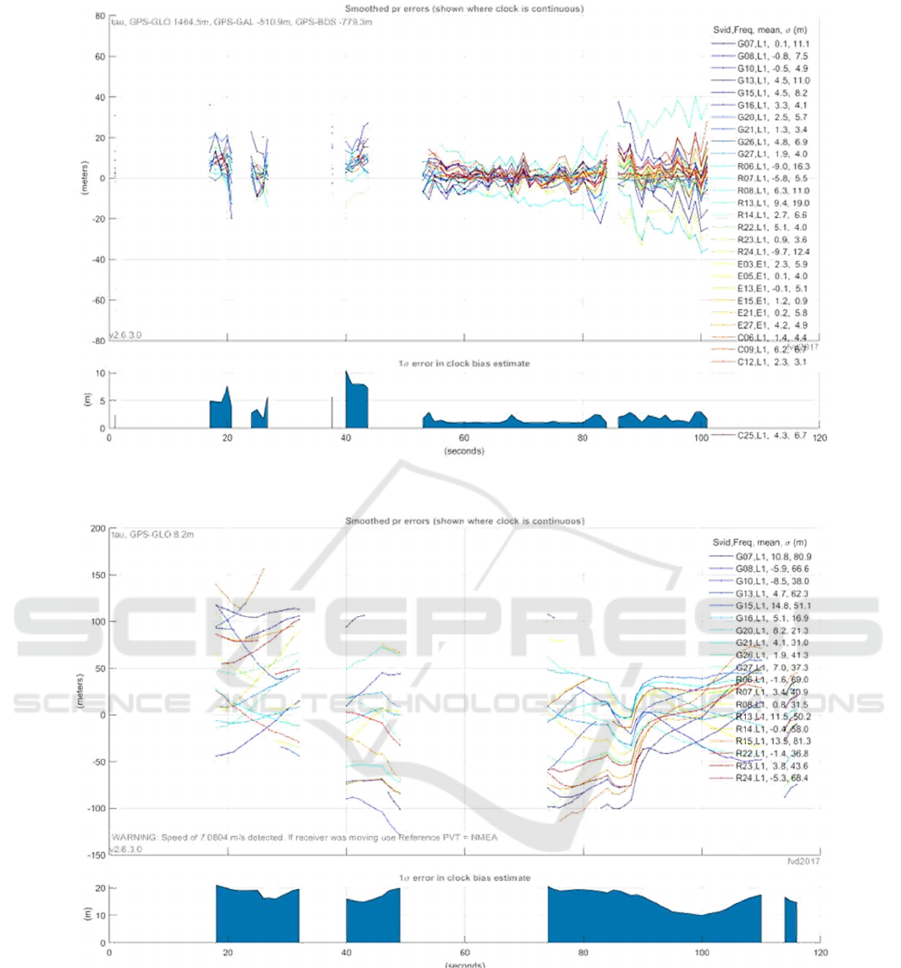
Figure 5: Pseudorange error – car excursion along the square-shaped route with Smartphone 1.
Figure 6: Pseudorange error – car excursion along the square-shaped route with Smartphone 2.
4.5 Straight Line Route – Bicycle
Excursion with Smartphone 1
The HDOP value in case of GLONASS oscillated
from 1.2 to 3. The signals from other satellite systems
were stable. In some part of the measurement time,
reception of Galileo and BeiDou was not possible,
due to signal loss.
At first, the frequency drift rose with 0.45 ppb/s,
then shrank with 0.15 ppb/s. Between 80-140 s,
the receiver did not monitor satellites in a continuous
way. That is why during this time the clock drift was
not calculated. In other parts of the measurement
time, the drift changed with -0.24 ppb/s
(when moving from building surroundings to open
space). The clock drift, calculated between 86-110 s,
was equal to 593 ppm.
The biggest observed pseudorange error was
equal to 150 m (see Figure 7). When surrounded by
high buildings, we were not able to determine the
QQSS 2021 - Special Session on Quality of Service and Quality of Experience in Systems and Services
634
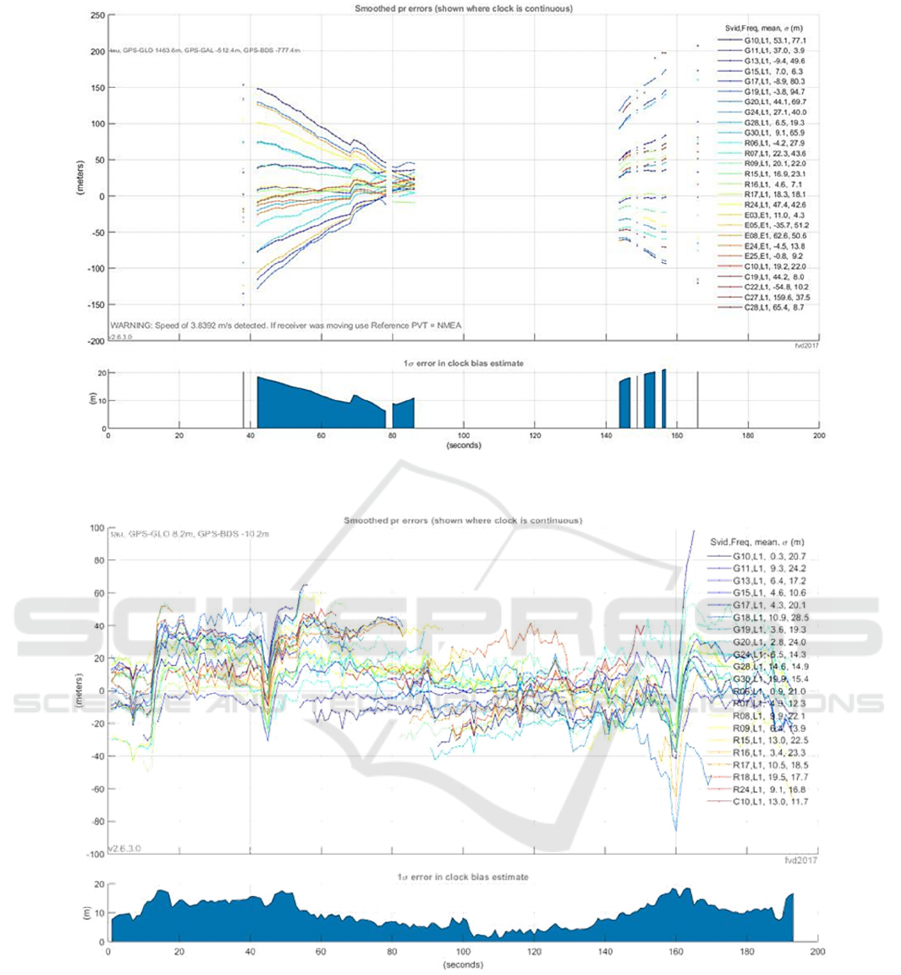
Figure 7: Pseudorange error – bike excursion along the straight line route with Smartphone 1.
Figure 8: Pseudorange error – bike excursion along the straight line route with Smartphone 2.
error. A linear decrease in error may be observed,
when the device reached open space. Position
calculations using WLS provided an accurate
estimation. Between 80-140 s, clock biases were
encountered. The horizontal error for 50% of results
was less than 164.5 m, and less than 235.1 m for 95%
of data. In case of vertical error, it was equal to less
than 28.4 m for 50% of data, and less than 215 m for
95% of data.
4.6 Straight Line Route – Bicycle
Excursion with Smartphone 2
In case of the HDOP values for GPS, they oscillated
around approx. 1.2, whereas GLONASS received
approx. 2. This mobile device enabled stable
reception for GPS and GLONASS constellations.
The CNR value did not change much, equal too
approx. 38-45 dBHz over time.
DOP and Pseudorange Error Estimation in Urban Environments for Mobile Android GNSS Applications
635
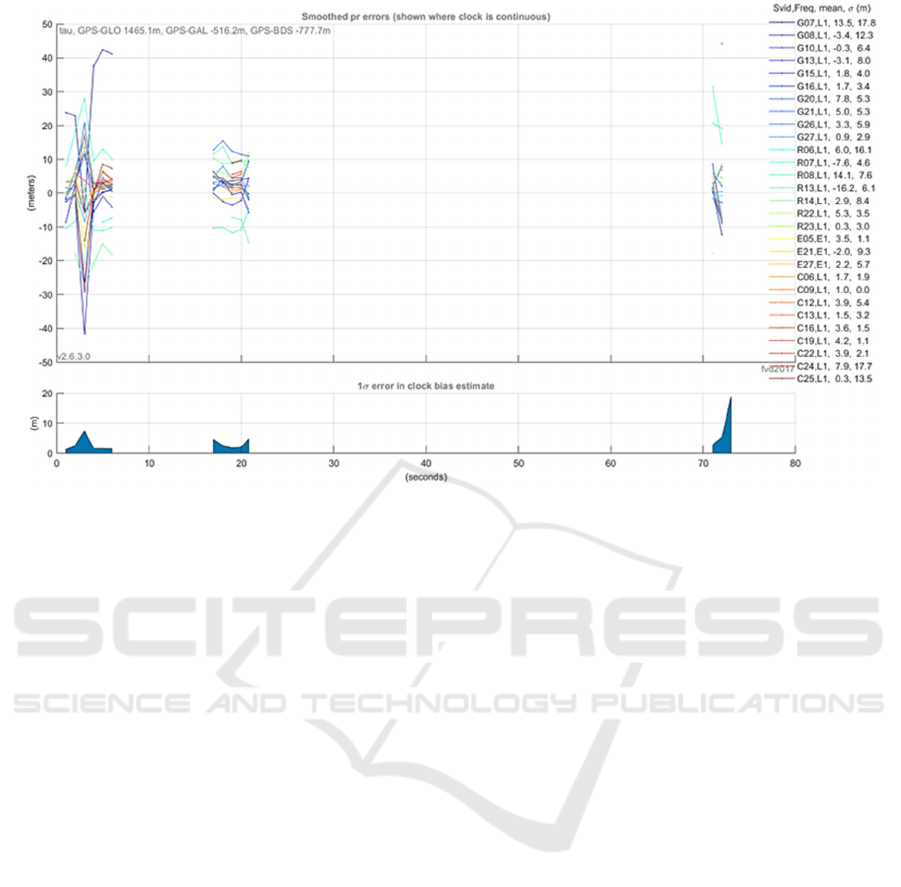
Figure 9: Pseudorange error – car excursion along the straight line route with Smartphone 1.
The frequency drift was equal to 0.04 ppb/s.
The clock bias raised in a linear scale, up to 12 ms.
The pseudorange error in case of 95% of data was less
than 35.7 m. The pseudorange error oscillated around
0 m/s, and was getting higher for satellites on low
elevation levels (see Figure 8).
In case of the WLS, the horizontal error for 50%
of samples was less than 9.3 m, and less than 18.2 m
for 95% of samples. The vertical error was equal to
16.1 m for 50% of samples, and 40.5 m for 90%
of samples. The estimated height was equal to above
60 m, which was not close to real conditions, in which
the height ranged for approx. 2 m. In case of raw data,
the estimated height was around 0 m, with 40 m
in just some cases.
4.7 Straight Line Route – Car
Excursion with Smartphone 1
In case of BeiDou, the C19 satellite exceeded the
reference signal level. However, the signal from this
satellite was only observed for a limited time period.
The HDOP value ranges from 1.2 to 3. For GPS it
indicated 7 to 11 objects, whereas in case of
GLONASS, the number of monitored satellites
ranged from 3 to 9.
During the evaluation, the clock was not stable, the
maximum frequency drift was equal to 11.94 ppb.
The clock drift was equal to 512 ppm. Due to clock
biases, the pseudorange error in case of 95% of
samples was less than 20.7 m. For Galileo, the error
raised up to 100 m (see Figure 9). Thanks to WLS,
the horizontal error for 95% of samples was less than
7.7 m, whereas for 50% it was less than 0.3 m.
4.8 Straight Line Route – Car
Excursion with Smartphone 2
In case of GPS, those satellites had good geometry.
HDOP during 63 s achieved a value of less than 1.
Whereas, the number of observed satellites was equal
to 10. The received signal strength level was stable,
especially when examining GPS satellites at a height
of above 30 degrees, i.e. G12.
During the whole time, the clock was stable,
for the first 27 s the drift was relatively stable,
increasing by 0.04 ppb/s. The clock bias was
increasing linearly, reaching 4.5 ms at the end.
The pseudorange error for 95% of samples was
less than 13.5 m (see Figure 10). This is mostly due
to the fact that measurements were carried out in an
open space. The Doppler shift error oscillated from
0 up to 3 m/s.
In case of WLS, the horizontal error for 95%
of samples did not exceed 6.8 m, and was less than
3.3 m for 50% of samples. Whereas the vertical error,
in case of 50% of samples, was less than 4.5 m,
whereas for 95% of data it was less than 13.5 m.
According to obtained results, for the first 40 s,
the receiver (mobile device) was traveling on flat
terrain, then the height decreased. However, this was
not correct, as the height itself did not change.
QQSS 2021 - Special Session on Quality of Service and Quality of Experience in Systems and Services
636

Figure 10: Pseudorange error – car excursion along the straight line route with Smartphone 2.
5 SUMMARY
This work describes results of a study, focused on the
DOP and pseudorange precision of GNSS systems
using smartphones, their quality, reliability, related to
signal reception. The tested devices, coming from
2 different manufacturers, were all Android-powered
devices. The measurement campaign itself was
carried out in different conditions, including
surrounding buildings, terrain topology, and urban
fabric.
5.1 GNSS Signal Reception
The first smartphone seldom provided a signal level
above the referenced CNR. Whereas the second one
received at least over 10 such signals (above
reference level), from which only 1 came from a
constellation other than GPS or GLONASS.
The CNR value itself was also different. In case
of Smartphone 1 this parameter dynamically changed
(fluctuated) over time, even in a few second interval.
On the other hand, Smartphone 2 proved to be more
stable, as recorded CNR values did not changed that
rapidly.
5.2 Time Calculations and Precision
One must note that maintaining continuity of clock
(time) measurements is of great importance. In case
of the second device, no discontinuous measurements
were observed. In most cases, the frequency drift was
equal to approx. 0.058 ppb/s. Whereas in case of
Smartphone 1, during 26.6% of time,
the measurements were discontinuous. In this case,
most often the average frequency drift was equal to
approx. 0.252 ppb/s. Furthermore in one case, it was
not possible to calculate the drift due to instability.
With the utilization of the WLS algorithm, it was
possible to calculate the pseudorange value. In case
of Smartphone 1, the average value was equal to
31.82 m. Whereas for Smartphone 2, it was equal to
32.5 m. As shown, this difference was slight.
5.3 Overall Remarks
According to the study, it should be pointed out that
numerous factors and conditions influence the final
accuracy and precision of satellite positioning,
especially in urbanized areas, when using different
means of transport. The navigation performance
depends on basic characteristics of the smartphone,
both communication (e.g. antenna features, supported
wireless systems, etc.) and data processing
(CPU, RAM, storage, etc.). In such a context, it seems
interesting to evaluate and compare in practice a
broader range of mobile devices in future studies.
As noticed, more and more powerful consumer
electronics are released on the market every year.
On the other hand, user preferences and expectations
do change from time to time (Finley et al., 2017;
Falkowski-Gilski, 2020; Falkowski-Gilski and Uhl,
DOP and Pseudorange Error Estimation in Urban Environments for Mobile Android GNSS Applications
637

2020). Future studies should include consumer
devices with diverse integrated GNSS modules,
different distribution of the Android operating
system, as well as deployment scenarios.
REFERENCES
An, X., Meng, X., Jiang, W. (2020). Multi-constellation
GNSS precise point positioning with multifrequency
raw observations and dual-frequency observations of
ionospheric-free linear combination. Satellite
Navigation, 1, 7.
Chruszczyk, Ł. (2017). Statistical analysis of indoor RSSI
read-outs for 433 MHz, 868 MHz, 2.4 GHz and 5 GHz
ISM bands. International Journal of Electronics and
Telecommunications, 63(1), 33-38.
Cisco (2012). Digital Transmission: Carrier-to-Noise
Ratio, Signal-to-Noise Ratio, and Modulation Error
Ratio.
Falkowski-Gilski, P. (2020). On the consumption of
multimedia content using mobile devices: A year to
year user case study. Archives of Acoustics, 45(2),
321-328.
Falkowski-Gilski, P., Uhl, T. (2020). Current trends in
consumption of multimedia content using online
streaming platforms: A user-centric survey. Computer
Science Review, 37, 100268.
Finley, B., Boz, E., Kilkki, K., Manner, J., Oulasvirta, A.,
Hämmäinen, H. (2017). Does network quality matter?
A field study of mobile user satisfaction. Pervasive and
Mobile Computing, 39, 80-99.
Gilski, P., Stefański, J. (2015). Survey of radio navigation
systems. International Journal of Electronics and
Telecommunications, 61(1), 43-48.
Gilski, P., Stefański, J. (2016). Android OS: A review,
TEM Journal, 4(1), 116-120.
GSA. (2017). Using GNSS raw measurements on Android
devices.
Guo, L., Wang, F., Sang, J., Lin, X., Gong, X., Zhang, W.
(2020). Characteristics analysis of raw multi-GNSS
measurement from Xiaomi Mi 8 and positioning
performance improvement with L5/E5 frequency in an
urban environment. Remote Sensing, 12, 744.
Hendikawati, P., Arifudin, R., Zahid, M. Z. (2018).
Development of computer-assisted instruction
application for statistical data analysis android platform
as learning resource. Journal of Physics: Conference
Series, 983, 012057.
Hendikawati, P., Zahid, M. Z., Arifudin, R. (2019a).
The development of textbooks for mobile application
programming. Journal of Physics: Conference Series,
1321, 032019.
Hendikawati, P., Zahid, M. Z., Arifudin, R. (2019b)
Android-based computer assisted instruction
development as a learning resource for supporting self-
regulated learning. International Journal of Instruction,
12(3), 389-404.
Khan, J., Shahzad, S. (2015). Android architecture and
related security risks. Asian Journal of Technology and
Management Research, 5(2), 14-18.
Langley R. B. (1999). Dilution of precision. GPS World,
5, 52-59.
Laurichesse, D., Rouch, C., Marmet, F. X., Pascaud, M.
(2017). Smartphone applications for precise point
positioning. In ION GNSS+ 2017, 30th International
Technical Meeting of the Satellite Division of The
Institute of Navigation, 171-187.
de Oliveira, R. C., de Oliveira, H. M., Ramalho, R. A.,
Viana, L. P. S. (2016). Performance assessment of
WhatsApp and IMO on Android operating system
(Lollipop and KitKat) during VoIP calls using 3G or
WiFi. Global Journal of Computer Science and
Technology, 16(1), 1-8.
Prabowo, A., Rahmawati, U., Anggoro, R. P. (2019).
Android-based teaching material for statistics
integrated with social media WhatsApp. International
Journal on Emerging Mathematics Education, 3(1),
93-104.
Quan, Y., Lau, L., Roberts, G.W., Meng, X. (2016).
Measurement signal quality assessment on all available
and new signals of multi-GNSS (GPS, GLONASS,
Galileo, BDS, and QZSS) with real data. Journal of
Navigation, 69, 313-334.
Sharmilah, T., Yahya, M., Fuzi, K. M., Pauzi, M.,
Shirlynda, Z., Faris, N. A. (2019). Development of
temperature monitoring towards Industry 4.0.
In APCOM’19, 25th International Conference on
Applied Physics of Condensed Matter, 020034.
Specht, C., Szot, T., Dąbrowski, P., Specht, M. (2020).
Testing GNSS receiver accuracy in Samsung Galaxy
series mobile phones at a sports stadium. Measurement
Science and Technology, 31(6), 064006.
Su, K., Jin, S., Jiao, G. (2020). Assessment of multi-
frequency global navigation satellite system precise
point positioning models using GPS, BeiDou,
GLONASS, Galileo and QZSS. Measurement Science
and Technology, 31(6), 064008.
Teunissen, P. J. G., Montenbruck, O. (Eds.) (2017).
Springer Handbook of Global Navigation Satellite
Systems, Springer. Berlin, 1
st
edition.
Ul Abideen, Z., Ali Tariq, H., Shah Talha Naqash, S. H.,
Qaseem, U. (2018). Android apps management system
to ensure mobile security. In ICKII’18, 1
st
IEEE
International Conference on Knowledge Innovation
and Invention, 78-81.
QQSS 2021 - Special Session on Quality of Service and Quality of Experience in Systems and Services
638
