
CoAx: Collaborative Action Dataset for Human Motion Forecasting in
an Industrial Workspace
Dimitrios Lagamtzis
1 a
, Fabian Schmidt
1 b
, Jan Seyler
2 c
and Thao Dang
1 d
1
Department of Computer Science and Engineering, Esslingen University, Esslingen, Germany
2
Festo SE & Co. KG, Esslingen, Germany
Keywords:
Human Robot Collaboration, Industrial Assembly Dataset, Human Motion Forecasting, Action Recognition.
Abstract:
Human robot collaboration in industrial workspaces where humans perform challenging assembly tasks has
become too much; increasingly popular. Now that intention recognition and motion forecasting is being more
and more successful in different research fields, we want to transfer that success (and the algorithms making
this success possible) to human motion forecasting in an industrial context. Therefore, we present a novel
public dataset comprising several industrial assembly tasks, one of which incorporates interaction with a robot.
The dataset covers 3 industrial work tasks with robot interaction performed by 6 subjects with 10 repetitions
per subject summing up to 1 hour and 58 minutes of video material. We also evaluate the dataset with two
baseline methods. One approach is solely velocity-based and the other one is using timeseries classification to
infer the future motion of the human worker.
1 INTRODUCTION
Collaborative robots (or cobots as introduced in (Col-
gate and Peshkin, 1999)) have received growing in-
terest in both academia and industry over the last
decade. While traditional robots usually operate in
confined work cells, collaborative robots are not sep-
arated from human workers. They allow interaction
to solve given tasks in e.g. manufacturing or medical
procedures combining cognitive abilities of humans
with the repeatability and strength of robot manip-
ulators. Human-Robot-Collaboration (HRC) has the
potential to increase efficiency in assembly tasks and
lower production costs. A general overview of HRC
for manufacturing applications and current research
trends is presented in (Matheson et al., 2019).
This article is intended to advance the develop-
ment of motion and action forecasting methods for as-
sembly tasks with collaborative robots. Motion fore-
casting is a very active research field (cf. Sec. 2). Its
development requires a significant amount of sample
data for training and evaluation. While a large body
of datasets already exists (as will be discussed in the
next section), we find there are still not many sam-
a
https://orcid.org/0000-0003-3342-5083
b
https://orcid.org/0000-0003-3958-8932
c
https://orcid.org/0000-0002-0857-7184
d
https://orcid.org/0000-0001-5505-8953
ples available for HRC in industrial assembly tasks.
Such tasks involve workpiece components and assem-
bly tools (screwdrivers, soldering irons, . . .). Collab-
orative assembly tasks incorporate actions of humans
as well as maneuvers of the robot that modify objects
in the workspace to assist the human. To the best of
our knowledge, the latter has not been captured in
publicly available datasets before. We will provide
free access to our dataset
1
of assembly tasks with and
without robot interaction. The dataset comprises three
tasks recorded by six subjects with ten repetitions per
subject. It contains RGBD data, hand and object pose
detection results as well as manually defined ground
truth action labels that may readily be used for train-
ing motion forecasting methods. We also evaluate
available hand pose detection methods and compare
them using a suitable quality measure. Meaningful
performance indices to assess motion forecasting al-
gorithms are proposed (mean and maximum position
deviations, and percentage of prediction errors below
acceptable bounds). Finally, we have developed two
baseline methods, velocity-based motion prediction
and time series classification for action recognition
and motion prediction, and show benchmark results
on our data.
The remainder of this article is organized as fol-
lows: Sec. 2 gives an overview of related work on
1
Available at: dlgmtzs.github.io/dataset-coax
98
Lagamtzis, D., Schmidt, F., Seyler, J. and Dang, T.
CoAx: Collaborative Action Dataset for Human Motion Forecasting in an Industrial Workspace.
DOI: 10.5220/0010775600003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 3, pages 98-105
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

action recognition and forecasting as well as on exist-
ing datasets. Sec. 3 describes the exemplary assembly
tasks that have been selected for our novel dataset.
A summary of object detection algorithms and an-
notation methods used to generate the data is also
given. Sec. 4 proposes quantitative measures to assess
the performance of action recognition and forecasting
methods and evaluates the performance of two base-
line algorithms on the dataset. Sec. 5 concludes the
paper and gives an outlook on generating application-
driven benchmarks for action forecasting methods.
2 RELATED WORK
2.1 Existing Datasets
A recent review of existing datasets for human ac-
tion recognition and motion forecasting is given in (Ji
et al., 2020).
As mentioned in (Dreher et al., 2020), datasets
generated to research human action recognition prob-
lems can be categorized into RGB, RGBD and more
complex setups based on their recording modalities.
Since we target HRC in an industrial context, we fo-
cus on RGBD datasets containing samples of assem-
bly tasks.
(Dallel et al., 2020) compiled a very large dataset
illustrating industrial actions that a human is execut-
ing in a collaborative workspace. They provided RGB
data and 3D information of the human actor’s skele-
ton. As mentioned earlier, considering that we want to
research human action recognition and motion fore-
casting in 3D environments, it is of great importance
to also provide the observations of the objects with
which humans interact in a 3D format. Additionally,
with a view to minimizing the additional hardware re-
quirements, we intend to use a minimum amount of
vision sensors for observing the environment. Fur-
thermore, we believe it is essential to use a perspec-
tive in which the human, the industrial workspace
in which he or she is working, and the collaborat-
ing robot itself are visible, so that all the information
required for action recognition and motion forecast-
ing can be derived from it. These requirements are
not fullfilled by the dataset provided by (Dallel et al.,
2020). (Aksoy et al., 2015) published the popular Ma-
niac dataset. It displays different human tasks and
provides RGBD information of the video data. The
lack of a suitable camera angle, relevant tasks for an
industrial context, and the fact that the provided ob-
ject labels are often inconsistent within a task, made
the dataset unsuitable for our goal.
The Bimanual Actions Dataset (Dreher et al.,
2020) provides a dataset of kitchen and work tasks
with RGBD modality and derived data, namely object
and action labels, to support research in human action
recognition. The tasks included in the dataset are very
useful to research and evaluate baseline algorithms for
human action recognition and motion prediction.
However, we believe HRC for industrial tasks re-
quires a strong focus on assembly activities and robot
interaction. In addition, the camera and the angle
are from the perspective of a robot that observes the
scene. This is one option of capturing the scene, yet
we seek that the robot itself is part of the scene and
thus must be recorded by the camera. Given that the
data format and the proposed pipeline for generating
these data are designed simple and adaptable, they
serve as a blueprint for the dataset published with this
paper.
2.2 Motion Forecasting
The overall goal of this research is to predict the fu-
ture motion and thus the behavior of a human actor in
a collaborative environment. Motion forecasting can
be performed by simply using the temporal informa-
tion to predict the future position. Also semantical
information like the intention or the action the human
is about to perform can be used to derive the future
motion. In the following, we will review methods of
both categories referred to as with and without action
recognition.
2.2.1 Without Action Recognition
The prediction of human motion without action
recognition aims to understand the temporal as well
as spatial behavior of a subject based on the ob-
served sequences to generate future body poses. For
this sequential task, recurrent neural networks are
widely employed, which is related to the success of
sequence-to-sequence prediction architectures. Using
RNNs to model human motion prediction has become
the de facto standard that was initially introduced by
(Fragkiadaki et al., 2015) who proposed an Encoder-
Recurrent-Decoder model. The ERD model includes
nonlinear encoder and decoder networks before and
after recurrent layers to extend the basic Long Short
Term Memory (LSTM) models to jointly learn repre-
sentations and their dynamics.
A similar approach in the form of deep RNNs for
short-term prediction (<1s) was established by (Mar-
tinez et al., 2017) by using a sequence-to-sequence
architecture based on Gated Recurrent Units (GRUs)
that is predicting velocities to model future human
poses. Although (Martinez et al., 2017) outperformed
CoAx: Collaborative Action Dataset for Human Motion Forecasting in an Industrial Workspace
99
(Fragkiadaki et al., 2015), both approaches suffer
from discontinuities between the observed poses and
the predicted future ones since RNNs struggle to
maintain the long-term dependencies needed for fore-
casting further into the future. Even though RNNs
seem to be the first choice for sequential data, (Li
et al., 2018) introduced a convolutional sequence-to-
sequence that is capable of capturing both spatial and
temporal correlations and therefore the invariant and
dynamic information of human motion.
Despite the fact that a variety of approaches have
been developed for predicting human movements,
they are often tailored to specific tasks or motions
and therefore not universally applicable. For this rea-
son, (Lasota, 2017) introduced the Multiple-Predictor
System, which determines the best parameters for
each implemented prediction method directly from
observed human motions. The system also deter-
mines which combination of these predictors pro-
duces the best possible result for a variety of different
scenarios.
2.2.2 With Action Recognition
Several methods have been proposed in the litera-
ture that learn distinct actions or action classes of
the human and employ such prototypes to predict the
human’s motion. (Perez-D’Arpino and Shah, 2015)
and (Zanchettin and Rocco, 2017) utilize Bayesian
inference to classify a human’s reaching intention.
(Luo and Berenson, 2015) proposed an unsuper-
vised learning approach predicting human motions
using Gaussian Mixture Models (GMM) of the arm
and palm. Their two-layer framework consists like
(Perez-D’Arpino and Shah, 2015) of a motion/action
classifier and a motion predictor. In (Luo and Mai,
2019) Probabilistic Dynamic Movement Primitives
(PDMP) have been utilized to classify and predict the
human’s intention and future motion in a two-stage
approach. (Wang et al., 2017) presented a system that
trains a CNN and a LSTM to understand human in-
tentions and predict the future human intention.
(Dreher et al., 2020) presented an approach for ac-
tion segmentation and recognition that learns object-
action relations from bimanual human demonstrations
using a graph network to process the scene informa-
tion, which could be interesting for future research
work towards motion forecasting.
Regardless of the described approaches to motion
forecasting, the focus of this research was to provide
a novel dataset for human action and motion forecast-
ing in an industrial context, and to provide a basis
for future research using this dataset. Therefore, ini-
tially it is sufficient to develop and implement base-
line methods for the aforementioned purpose in or-
der to evaluate the dataset. We hope that our dataset
will provide a basis for future research and, in partic-
ular, for evaluating state-of-the-art approaches to hu-
man action recognition and motion forecasting in an
industrial setting.
3 DATASET GENERATION
Our dataset presents three industrial work tasks de-
signed to outline collaborative work between a human
and robot actor. This section starts by describing the
hardware and overall system structure used to record
our data. The tasks are defined in detail (Sec. 3.2)
and finally the processing pipeline used to generate
the dataset is outlined (Sec. 3.3).
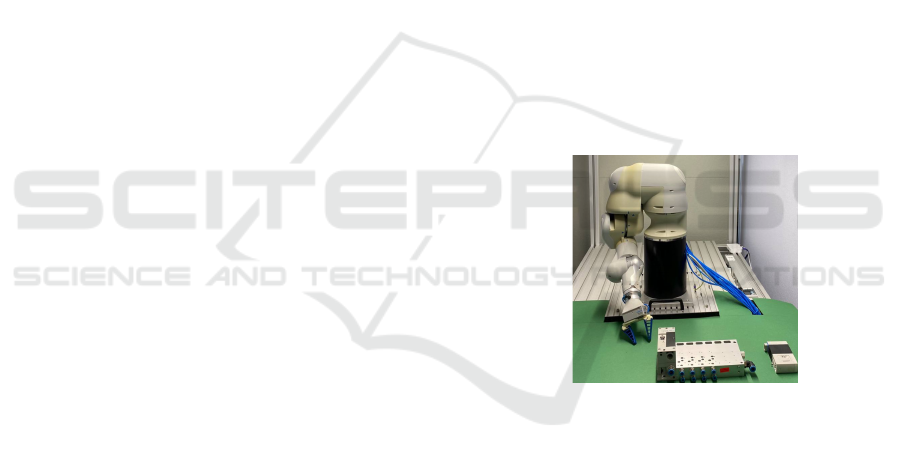
3.1 System Overview
Our physical system consists of a work cell in our
laboratory, equipped with a Festo pneumatic collab-
orative robot arm (Figure 1). Inside the work cell, a
human is observed using the vision system perform-
ing work tasks in collaboration with the robot. To
Figure 1: Collaborative robot in work cell.
capture the dataset, an Intel RealSense Depth Cam-
era D435 was used, capturing images at 15 fps with
a resolution of 640 px × 480 px. To overlook the
space where a human actor and a robot collaborate
in solving tasks, the camera was mounted at a height
of 0.75m on the work cell relative to the robots base
link and tilted downward. The tilt angle is limited by
the human pose detection algorithms, which will be
discussed later.
In order to represent all objects, including the de-
tected hand pose in the same coordinate system, it
was necessary to calibrate the stereo camera used in
the setup. Therefore, we used a tool that utilizes
ArUco markers in combination with calibration meth-
ods from (Tsai and Lenz, 1989). All provided 3D data
points are in the robots coordinate system. Our sys-
tem is based on ROS (Quigley et al., 2009).
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
100

3.2 Task Description
In this subchapter the data will be characterized in
more detail by describing the recorded tasks, the ac-
tions executed and the objects interacted with. Every
task consists of actions that can be performed by the
human and specific objects that need to be interacted
with. Due to the importance of collaborative work
between human and robot in an industrial workspace,
we propose three tasks that have a link to real indus-
trial work tasks: assembly of a valve terminal, assem-
bly of a valve, and soldering a capacitor on an electric
circuit board.
Figure 2: Task overview. Rows: show as follows task 1 to
3. (Detailed description of tasks in 3.2.)
Task 1: Valve Terminal Plug & Play
In this task a human agent is setting up a valve
terminal with a valve. This involves actions like
screwing the valve into the valve terminal and also
grabbing and installing a hose. The screws are al-
ready placed in their position for simplicity reasons.
This task is intended to show a typical assembly as
it might occur in a collaborative industrial workspace.
Task 2: Valve Assembly
In this particular task, a valve is assembled from its
individual parts. The screws belong to the actual
objects of the scene and are located in a designated
box. Two screws are used to assemble the main
modules of the valve. The last step in the assembly
is the attachment of the membrane in its designated
place, likewise, stored in a box in the scene.
Task 3: Collaborative Soldering
The final task explicitly shows a collaboration be-
tween the human actor and the robot in the workspace.
The robot assists the human in a soldering task by
acting as a third arm. Once the robot recognizes the
human’s intention to solder, it reaches the soldering
board, holding it for the human and aligning it so that
the human can solder a capacitor onto it. This task
involves the human waiting for the robot in order to
continue.
3.2.1 Scene Objects
For all tasks, a set of possible objects is defined that
can occur in the scene. Possible objects are: screw-
driver, hose, valve terminal, valve, box with screws,
box with membranes, soldering station, soldering
iron, soldering tin, soldering board and a capacitor.
Additional special objects are: the collaborative robot
with its end-effector, the human and the right hand.
The robot is described by a 2D and 3D position de-
rived, from the manually labeled bounding box and
the momentary position of the motion planner con-
taining the exact position of the robot’s base joint. All
objects are numbered in sequence.
3.2.2 Human Actions
For all tasks, a set of possible actions is defined that
can be performed by the human. All possible ac-
tions are in general as follows: approach, grab, plug,
join, wait for robot, screw, release, solder, place, re-
treat. This description is adapted from (Dreher et al.,
2020). Unlike the aforementioned work, the possi-
ble actions in this research include the object being
interacted with. This leads to action specification in
terms of the given task, action, and object. For in-
stance, the action of a human actor grabbing an ob-
ject in the workspace is defined as the general action
grab and the corresponding prominent object speci-
fied in the task, which results in the action becoming
e.g. grab screwdriver for tasks where grabbing oc-
curs. All actions are, as well as the objects, numbered
in sequence. So that the action can be fully deter-
mined by the 2-tuple combination of action and object
id.
3.3 Dataset Generation Pipeline
In this subsection, the pipeline for generating the
dataset is described in detail. As mentioned in the
previous Section 2, one of the most fitting ways of
creating a dataset is that from (Dreher et al., 2020).
Therefore, it is used as guideline on how the pro-
posed dataset in this paper has been recorded and
made available.
The dataset generation pipeline can be divided
into two steps. After receiving recorded observations
as rosbags, an automated preprocessing of the rosbags
is performed. Features like the RGB image, the depth
image, the pointcloud as backup information, the 2D
and 3D hand pose and finally the robot’s 3D base and
CoAx: Collaborative Action Dataset for Human Motion Forecasting in an Industrial Workspace
101
end-effector pose are extracted. At this step there are
two possible ways to proceed. One can either man-
ually label all scene objects for the entire dataset or
use an object detector YOLO (Dreher et al., 2020) or
Mask RCNN (He et al., 2018), as this significantly fa-
cilitates 3D object segmentation. We decided to man-
ually label all objects for the entire dataset since we
would need to label our objects for the detector to
function well anyways. The second step in the dataset
generation pipeline is therefore the manual labeling
of the objects for each frame and the actions for each
sequence. Once this manual step is completed, the
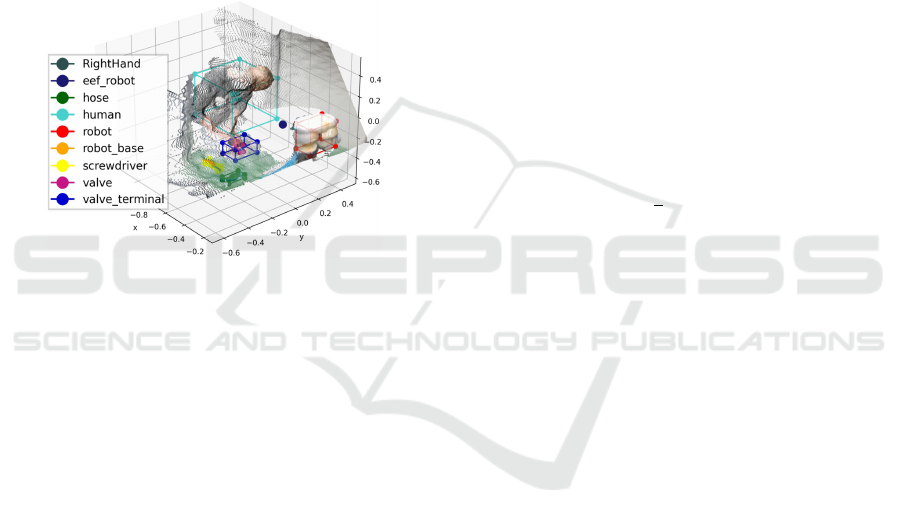
dataset can be generated. The figure below shows one
exemplary frame as a pointcloud with all scene ob-
jects 3D box bounded.
Figure 3: Processed dataset example: Pointcloud with 3D
box bounded objects from task 1.
The dataset provided in this research consists of
the 3 tasks described in Section 3.2. Each task was
recorded 10 times with 6 different human subjects
performing. This results to 180 recordings in total,
which accumulate to approximately 1h 58min of run-
time. The system described in Section 3.1 produces
the input for the dataset generation pipeline.
3.3.1 Object Labeling
Inferred from (Dreher et al., 2020), 2D bounding
boxes have been used to label the captured image
data. Since the dataset is generated offline, there are
two possible ways of labeling the objects recorded in
each video sequence. Either one can manually label
the objects or use a trained classification network to
generate labels automatically. Training a network re-
quires data or rather object data that has already been
labeled and can be used to retrain an existing network,
since the objects in the proposed tasks are not within
the objects available in any pretrained network. Be-
cause no labeled data existed, we decided to label the
object data for the whole dataset manually using an
annotation tool (Dutta and Zisserman, 2019). Using
this labeling tool enables the earlier mentioned way of
training a neural network that can then be used for au-
tomatic labeling of the objects. The annotation tool is
compatible with annotation formats that can be used
to train a Mask R-CNN (He et al., 2018). That means
that it is possible to reuse the manually labeled object
data in a second step to classify new data when the
dataset is extended.
3.3.2 Human- and Handpose Detection
For two-dimensional human pose estimation and the
associated detection of human joints we focus on the
widely used tool OpenPose (Cao et al., 2019) and
on the pose and hand detection of Googles frame-
work MediaPipe (Zhang et al., 2020). Since both ap-
proaches to human pose estimation are compatible to
the software as well as hardware of our system, we
performed a comparison of the accuracy of the two
detectors. To assess the accuracy, we use an adopted
version of the metric Percentage of Correct Keypoints
(Simon et al., 2017) that indicates the probability that
a detected keypoint p is within a distance threshold t,
given in pixel, of its true location q:
PCK
t
=
1
n
n
∑
i=1
d (p
i
, q
i
) < t (1)
Based on the CMU Panoptic Hand Dataset (Simon
et al., 2017), we evaluated both hand detectors us-
ing PCK
t
as performance measure by varying the dis-
tance threshold t from 1 to 20 pixels. The results have
clearly shown that OpenPose outperforms MediaPipe
in terms of quality by about 26%, so we decided to use
OpenPose as the method for human pose estimation.
To transform the two-dimensional pixel coordinates
of the human pose estimation into three-dimensional
space, the depth image of the Intel RealSense D435
is used. Experience has shown that the depth image
does not hold a valid value for the depth information
for every corresponding pixel of the RGB image. As
a result, the 3D coordinates cannot be determined for
every pixel. To filter invalid depth information, not
only a single pixel but also its surrounding pixels are
considered and then the median of the available depth
information is formed and used to transform the key-
point coordinates.
3.3.3 Action Labeling
Regarding the format of the action labels for each
task, we refer to (Dreher et al., 2020). The format for
the action label consists of the initial frame number
of the action, followed by the action label identifier
and enclosed by the terminal frame number (initial
frame number, action label identifier, terminal frame
number). For each task we manually labeled actions
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
102
according to these from Section 3.2.2. As already de-
scribed, the action is a composition of the general ac-
tion and the specified object that is directly related to
the action. Nonetheless one can easily just decode and
use the first ID, which is the action, to follow a more
general approach in action recognition.
4 BASELINE MOTION
FORECASTING METHODS
In this section, methods will be discussed that have
been implemented and evaluated to set a baseline
in motion forecasting for the proposed dataset. An
overview is given first, followed by a description of
the methods and presentation of experimental results.
4.1 Overview of the Methods
For the evaluation of the dataset, two baseline al-
gorithms for motion forecasting have been imple-
mented. As already mentioned in Section 2, we cat-
egorize motion forecasting into approaches with and
without action recognition and employ one method of
each category.
4.2 Velocity based Approach
As an approach to motion prediction without action
recognition, (Lasota, 2017) introduced the method
called Velocity-Based Position Projection, that is
based on projecting the current position of the hu-
man by estimating its current velocity. To estimate
the current velocity, our approach uses the spatial as
well as the temporal change of two consecutive hu-
man positions. As suggested by (Lasota, 2017), we
use the Savitzky-Golay-Filter (Savitzky and Golay,
1964), which basically performs a polynomial regres-
sion on the data series, smoothing the human position
data. Since there is no universal method for finding
the optimal parameters of the filter, we recorded ex-
emplary motions in this regard and determined the op-
timal set of parameters based on the mean prediction
error. Regarding the methods of performance mea-
surement, we used the mean and maximum prediction
error, calculated by evaluating the Euclidian distance
of a predicted position to its true location, and the Per-
centage of Correct Predictions PCP
t
. The metric PCP
t
is an adaption of PCK
t
, as it was also used by (Diller
et al., 2020), to measure the probability that a pre-
dicted keypoint is within a specified distance thresh-
old within the true location. Therefore, Equation 1
still applies, however the Euclidian distance to the
true location is now computed in three-dimensional
space and the distance threshold t is given in meters.
We evaluated the implemented velocity-based ap-
proach on our dataset regarding the mentioned per-
formance measures. We used a sliding window ap-
proach to capture the smoothed human position data
that is then used to produce several sets of predictions
of up to 3s in the future, leading to the exemplary task-
specific results shown in Table 1.
Table 1: Motion forecasting experiment: Results for exem-
plary test data sequence of task 1 performed by a specific
subject predicting up to 3s into the future. Mean and max-
imum prediction error are measured in meters. Percentage
of Correct Predictions PCP
t
was calculated based on a dis-
tance threshold t of 0.1m.
Time [ms] Mean Error Max. Error PCP
0.1
500 0.096m 0.385m 0.585
600 0.122m 0.431m 0.527
1200 0.237m 0.958m 0.307
1800 0.339m 1.474m 0.185
2400 0.434m 1.918m 0.126
3000 0.537m 2.383m 0.094
4.3 Motion Prototype Approach
The motion prototype approach is an adaption to the
time series classification method proposed in (Perez-
D’Arpino and Shah, 2015) and (Lasota, 2017). In our
version we proceed as follows. We use all hand trajec-
tories of our dataset that belong to one specific task.
We then derive the subtrajectories for each action that
are received from the action labels for the given task
sequence. Subsequently we calculate the mean µ and
the covariances Σ for every family of trajectories that
we concluded for each action, resulting to our motion
prototypes. For the alignment of the trajectories, we
use an approximate dynamic time warping algorithm
(FastDTW) (Salvador and Chan, 2007) to overcome
limitations in time and space complexity. In a next
step we then predict, for an unseen test data window
of size α, the motion prototype x
p
, namely the action.
This is done by computing the log posterior as de-
scribed in (Perez-D’Arpino and Shah, 2015). When
the motion prototype for the window is predicted, we
search for a representative point x
p
r
, in the motion pro-
totype by calculating the mean squared error. After
finding the representative point x
p
r
we can forecast the
future point, based on the time horizon t
h
by com-
puting x
t+t
h
= x
p
r+t
h
. In order to not be susceptible to
the fact that objects moved by the human hand can be
manipulated in slightly different places from person
to person and from task to task, we calculated a posi-
tion delta between the representative point x
p
r
and the
previously predicted point x
p
r+t
h
and added it to the
CoAx: Collaborative Action Dataset for Human Motion Forecasting in an Industrial Workspace
103
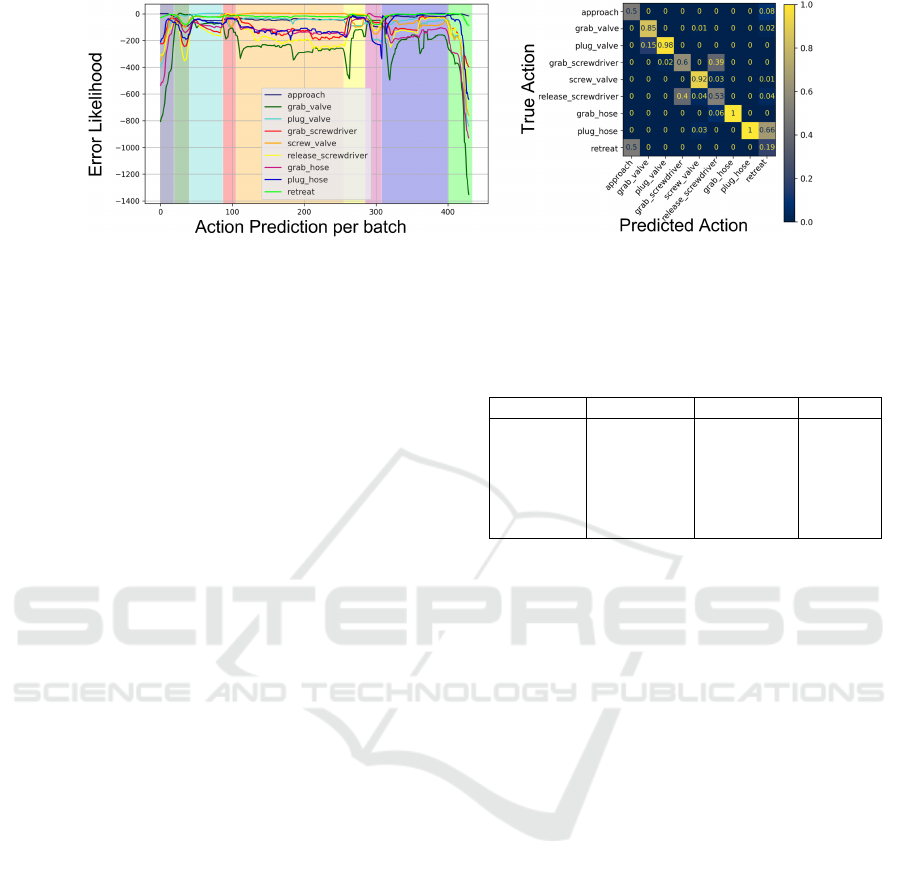
Figure 4: Experiment results with motion prototype approach for task 1. Left figure: Error likelihood for predicted actions.
The maximum likelihood translates to the predicted action. The background color highlights the ground truth action for the
given sequence. Every prediction was made for every batch. Right figure: Normalized confusion matrix action classification.
last known position of the test window, resulting in
the following equation for the prediction.
x
t+t
h
= x
t
+ (|x
p
r
− x
p
r+t
h
|) (2)
Since we know the true point, we can calculate the
error as the difference of the true and predicted point,
as described in the next paragraphs.
The experiments with the motion prototype ap-
proach have been set up as follows. For each task in-
troduced in the dataset, a train test split has been per-
formed such that 45 sequences of the same task per-
formed by different subjects have been used for train-
ing of the motion prototypes and 15 for the testing.
For the 15 test sequences that have not been respected
within the creation of the prototypes, we evaluated the
action prediction and the subsequent motion forecast-
ing. Using overlapping sliding windows, we created
batches of the size 5 (less than a half second) for the
action prediction. The result of the action prediction
for each batch was then used to do the motion fore-
casting. We predicted the future position for a time
horizon of 0.5 seconds up to 3 seconds. We evaluated
the performance of the predictions by measuring the
error for all batches of one sequence. We used the
same performance measurements as for the velocity-
based approach in Section 4.2.
The results for the action prediction in Figure 4,
more precisely on the confusion matrix show clearly
that most actions can be predicted accurately. Though
actions that can be seen as complements to each other,
namely grab and release or approach and retreat
show a certain behaviour of misclassification leading
to a bad prediction. The correlation between these ac-
tions, where the associated prototypes have a similar
spatial magnitude, could be one reason for this. Re-
garding the subsequent motion and position forecast-
ing results, the three performance measures for this
experiment scored as follows:
The motion prototype approach constrains the
time (number of steps) that can be predicted into the
Table 2: Motion forecasting experiment: Results for exem-
plary test data sequence of task 1 predicting 0.5s up to 3s
into the future.
Time [ms] Mean Error Max. Error PCP
0.1
500 0.136m 0.597m 0.534
600 0.151m 0.622m 0.506
1200 0.208m 0.851m 0.317
1800 0.238m 0.947m 0.254
2400 0.305m 1.105m 0.214
3000 0.327m 1.105m 0.122
future by its prototype length for each motion class.
A possible solution to overcome this problem would
be to concatenate logically consecutive motion pro-
totypes. However, since this experiment shows only
results of our baseline approach with this method, we
did not pursue this approach any further and simply
accounted the last existing point of the prototype as
representative when no other point was left.
Comparing the two baseline methods, it is clear
that the motion prototype approach achieves better
results, especially at longer time horizons. This is
because semantic information, such as the action oc-
curring, is considered in the prediction. Nevertheless,
for a very short time horizon, when a velocity-based
motion forecasting is sufficient, the results are signif-
icantly better. We hope that this baseline can serve as
a starting point for comparison in future research.
5 CONCLUSION AND OUTLOOK
In this work we present a novel RGBD dataset with
direct context to the industry, showing subjects per-
forming different work tasks in a collaborative hu-
man robot working environment. Besides the RGBD
dataset we provide object labels per frame and action
ground truths for the right hand for each sequence.
In addition, we have developed a dataset generation
pipeline for feature extraction and thus for the gen-
eration of the dataset, which can be easily reused to
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
104

implement new tasks and generate new data. We envi-
sion that our dataset can be a useful basis for training
object detection methods and develop motion fore-
casting and action recognition algorithms in the con-
text of HRC.
We plan to further research algorithms for motion
forecasting in the industrial context with the use of
the proposed dataset. Therefore, we not only want
to use hand motion information to predict the future,
but combine it with semantic information. Above all,
we want to address problems inherent in time series
classification and other approaches, such as limitation
to short time horizons and the lack of generalizability
with respect to variations in the scene.
REFERENCES
Aksoy, E. E., Tamosiunaite, M., and W
¨
org
¨
otter, F. (2015).
Model-free incremental learning of the semantics of
manipulation actions. Robotics and Autonomous Sys-
tems, 71:118–133.
Cao, Z., Hidalgo Martinez, G., Simon, T., Wei, S., and
Sheikh, Y. A. (2019). Openpose: Realtime multi-
person 2d pose estimation using part affinity fields.
IEEE Transactions on Pattern Analysis and Machine
Intelligence.
Colgate, J. E. and Peshkin, M. A. (1999). Cobots. US Patent
No. 5952796A.
Dallel, M., Havard, V., Baudry, D., and Savatier, X.
(2020). InHARD - Industrial Human Action Recogni-
tion Dataset in the Context of Industrial Collaborative
Robotics. In 2020 IEEE International Conference on
Human-Machine Systems (ICHMS), pages 1–6.
Diller, C., Funkhouser, T. A., and Dai, A. (2020). Forecast-
ing characteristic 3d poses of human actions. CoRR,
abs/2011.15079.
Dreher, C. R. G., W
¨
achter, M., and Asfour, T. (2020).
Learning Object-Action Relations from Bimanual Hu-
man Demonstration Using Graph Networks. IEEE
Robotics and Automation Letters, 5(1):187–194.
Dutta, A. and Zisserman, A. (2019). The VIA Annotation
Software for Images, Audio and Video. In Proceed-
ings of the 27th ACM International Conference on
Multimedia, pages 2276–2279, Nice France. ACM.
Fragkiadaki, K., Levine, S., and Malik, J. (2015). Recur-
rent network models for kinematic tracking. CoRR,
abs/1508.00271.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2018).
Mask R-CNN. arXiv:1703.06870 [cs].
Ji, Y., Yang, Y., Shen, F., Shen, H. T., and Li, X. (2020).
A Survey of Human Action Analysis in HRI Applica-
tions. IEEE Transactions on Circuits and Systems for
Video Technology, 30(7):2114–2128.
Lasota, P. A. (2017). A multiple-predictor approach to hu-
man motion prediction. IEEE International Confer-
ence on Robotics and Automation (ICRA).
Li, C., Zhang, Z., Lee, W. S., and Lee, G. H. (2018). Con-
volutional sequence to sequence model for human dy-
namics. CoRR, abs/1805.00655.
Luo, R. and Berenson, D. (2015). A framework for un-
supervised online human reaching motion recognition
and early prediction. In 2015 IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS),
pages 2426–2433.
Luo, R. and Mai, L.-C. (2019). Human Intention Infer-
ence and On-Line Human Hand Motion Prediction for
Human-Robot Collaboration. IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS).
Martinez, J., Black, M. J., and Romero, J. (2017). On
human motion prediction using recurrent neural net-
works. CoRR, abs/1705.02445.
Matheson, E., Minto, R., Zampieri, E. G. G., Faccio, M.,
and Rosati, G. (2019). Human–Robot Collaboration
in Manufacturing Applications: A Review. Robotics,
8(4):100.
Perez-D’Arpino, C. and Shah, J. A. (2015). Fast target
prediction of human reaching motion for coopera-
tive human-robot manipulation tasks using time se-
ries classification. In 2015 IEEE International Con-
ference on Robotics and Automation (ICRA), pages
6175–6182, Seattle, WA, USA. IEEE.
Quigley, M., Gerkey, B., Conley, K., Faust, J., Foote,
T., Leibs, J., Berger, E., Wheeler, R., and Ng, A.
(2009). ROS: an open-source Robot Operating Sys-
tem. page 6.
Salvador, S. and Chan, P. (2007). FastDTW: Toward Ac-
curate Dynamic Time Warping in Linear Time and
Space. page 11.
Savitzky, A. and Golay, M. J. E. (1964). Smoothing and
differentiation of data by simplified least squares pro-
cedures. Analytical Chemistry, 36(8):1627–1639.
Simon, T., Joo, H., Matthews, I., and Sheikh, Y. (2017).
Hand keypoint detection in single images using mul-
tiview bootstrapping. In CVPR.
Tsai, R. and Lenz, R. (1989). A new technique for fully au-
tonomous and efficient 3D robotics hand/eye calibra-
tion. IEEE Transactions on Robotics and Automation,
5(3):345–358.
Wang, Z., Wang, B., Liu, H., and Kong, Z. (2017). Re-
current convolutional networks based intention recog-
nition for human-robot collaboration tasks. In 2017
IEEE International Conference on Systems, Man, and
Cybernetics (SMC), pages 1675–1680, Banff, AB.
IEEE.
Zanchettin, A. M. and Rocco, P. (2017). Probabilistic
inference of human arm reaching target for effec-
tive human-robot collaboration. In 2017 IEEE/RSJ
International Conference on Intelligent Robots and
Systems (IROS), pages 6595–6600, Vancouver, BC.
IEEE.
Zhang, F., Bazarevsky, V., Vakunov, A., Tkachenka, A.,
Sung, G., Chang, C., and Grundmann, M. (2020).
Mediapipe hands: On-device real-time hand tracking.
CoRR, abs/2006.10214.
CoAx: Collaborative Action Dataset for Human Motion Forecasting in an Industrial Workspace
105
