
Semantically Consistent Image-to-Image Translation for Unsupervised
Domain Adaptation
Stephan Brehm, Sebastian Scherer and Rainer Lienhart
Department of Computer Science, University of Augsburg, Universit
¨
atsstr. 6a, Augsburg, Germany
Keywords:
Image Translation, Semi-supervised Learning, Unsupervised Learning, Domain Adaptation, Semantic
Segmentation, Synthetic Data, Semantic Consistency, Generative Adversarial Networks.
Abstract:
Unsupervised Domain Adaptation (UDA) aims to adapt models trained on a source domain to a new target
domain where no labelled data is available. In this work, we investigate the problem of UDA from a
synthetic computer-generated domain to a similar but real-world domain for learning semantic segmentation.
We propose a semantically consistent image-to-image translation method in combination with a consistency
regularisation method for UDA. We overcome previous limitations on transferring synthetic images to
real looking images. We leverage pseudo-labels in order to learn a generative image-to-image translation
model that receives additional feedback from semantic labels on both domains. Our method outperforms
state-of-the-art methods that combine image-to-image translation and semi-supervised learning on relevant
domain adaptation benchmarks, i.e., on GTA5 to Cityscapes and SYNTHIA to Cityscapes.
1 INTRODUCTION
The problem of domain adaptation from a synthetic
source domain to the real target domain is mainly
motivated by the cheap and almost endless possi-
bilities of automated creation of synthetic data. In
contrast, data from the real domain is often hard to
acquire. This is especially true for most types of
labelled data. A common problem in computer vision,
for which acquiring real labelled data is exceptionally
hard, is semantic segmentation. Semantic segmen-
tation requires annotations at the pixel level. These
annotations commonly need to be created manually in
a time-consuming process that also demands rigorous
and continuous focus from human annotators. Due
to this, a reasonable approach is to learn as much
as possible from synthetic data and then transfer the
knowledge to the real domain. However, convo-
lutional neural networks (CNNs), in general, learn
features from the domain on which they are trained
on. This causes networks to perform poorly on
unseen domains due to the visual gap between these
domains. Unsupervised domain adaptation (UDA)
aims to bridge this domain gap in order to learn
models that perform well in the target domain without
ever using labels from that domain.
In this work, we aim to improve the quality and
usefulness of synthetic data by transforming synthetic
images such that they look more like real images.
However, such an Image-to-Image Translation (I2I)
approach cannot change fundamental differences in
image content because it needs to keep the trans-
formed images consistent to the semantic labels of
synthetic images. Because of this, we cannot bridge
the gap between synthetic and real domains solely by
an I2I approach.
The remaining differences are in image content
and include object shapes, object frequency, and
differences in viewpoint. Following recent work, we
utilise a Semi-Supervised Learning (SSL) framework
which allows us to include unlabelled data from the
real target domain into the training of a semantic
segmentation network. The main contributions of our
work are summarised as follows:
1. We propose a semantically consistent I2I method
that combines an adversarial approach with a
segmentation objective that is optimised jointly by
both generator and discriminator.
2. We improve both adversarial and segmentation
objectives with self-supervised techniques that
include the unlabelled data from the real target
domain into the training. Our method outperforms
state-of-the-art combinations of I2I and SSL on
challenging benchmarks for UDA. We provide ex-
tensive experiments and analyses and show which
components are essential to our approach.
Brehm, S., Scherer, S. and Lienhart, R.
Semantically Consistent Image-to-Image Translation for Unsupervised Domain Adaptation.
DOI: 10.5220/0010786000003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 2, pages 131-141
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
131

2 RELATED WORK
Semantic Segmentation: is the task of labelling
every pixel of an image according to the object class
it belongs to. In 2015, Long et al. proposed fully
convolution neural networks (FCNs) (Long et al.,
2015) improving massively upon classical methods
for semantic segmentation. Since then, many new
methods based on deep convolutional neural networks
were proposed (Chen et al., 2018; Wang et al., 2021;
Yu and Koltun, 2016). However, these methods
are directly learned on the real target domain in a
supervised fashion. In contrast, our method is able
to learn about the real domain without the necessity
of annotated real data.
Image-to-Image Translation (I2I): methods (Choi
et al., 2019; Pizzati et al., 2020) have been widely
used to bridge the gap between synthetic and real
data. For image data, this is commonly achieved
by learning a deep convolutional neural network that
receives a synthetic image from the source domain
as input and manipulates it in such a way that it
looks more realistic. Basically, these methods try
to make the synthetic data look more real. For our
task, it is important that the manipulated versions of
the synthetic data can be used for supervised training
of a segmentation method subsequently. In order
to learn useful manipulations for such a task, these
systems need mechanisms that keep the overall image
consistent with the synthetic labels.
Unsupervised Domain Adaptation (UDA): for se-
mantic segmentation has been extensively studied in
the last years. Adversarial training is often used in
UDA methods to adapt either input space, feature
space or output space of a semantic segmentation
network (Toldo et al., 2020). On the feature level, a
discriminator is trained to distinguish between feature
maps from different domains (Hoffman et al., 2016;
Chen et al., 2017; Hong et al., 2018). Popular
input space adaptation techniques utilise frameworks
based on cycle consistency (Zhu et al., 2017) for
UDA (Hoffman et al., 2018; Sankaranarayanan et al.,
2018; Chen et al., 2019; Murez et al., 2018). How-
ever, cycle consistency allows almost arbitrary trans-
formations as long as they can be reversed. In contrast
to these methods, we perform input space adaptation
in our I2I method without the need for cycle consis-
tency. Our method simply uses the annotations of the
synthetic data to directly enforce consistency.
Semi-Supervised Learning (SSL): aims to include
unlabelled data into the training which allows to use
data from the real domain. The dominant approaches
for SSL are pseudo-labelling and consistency regu-
larisation. An extensive overview can be found in
this survey (van Engelen and Hoos, 2020). Pseudo-
Labeling was first proposed in (Lee, 2013). Xie et
al. (Xie et al., 2020) recently showed that pseudo-
labels can indeed improve overall performance on
image classification tasks. They train a network on
labelled data and reuse high-confidence predictions
on unlabelled data as pseudo-labels. Pseudo-labels
are then included in the full dataset on which a new
model is subsequently trained from scratch.
Many recent SSL methods (Ke et al., 2019; Tar-
vainen and Valpola, 2017) include consistency regu-
larisation. They employ unlabelled data to produce
consistent predictions under different perturbations.
Possible perturbations can be data augmentation,
dropout or simple noise on the input data. The trained
model should be robust against such perturbations.
These approaches leverage the idea that a classi-
fier should output the same distribution for different
augmented versions of an unlabelled sample. This
is typically achieved by minimising the difference
between the prediction of a model on different per-
turbed versions of the same input. We utilise such an
approach to boost our performance even further. Our
I2I translation module also leverages pseudo-labels
created by such a consistency regularised method.
3 METHOD
In this work, we assume that image data is available
from both the synthetic source domain as well as
the real target domain. However, annotations are
only available in the synthetic source domain. We
aim to bridge the gap between the source and the
target data. Our image-sets are sampled from their
respective domains. The first step is to bring the
two domains closer together visually which means
transforming the synthetic data such that it looks
more real. By keeping consistency with the labels
of the synthetic source data, we are able to generate
a dataset of images with corresponding labels that
closely resembles the real target data in terms of
colour, texture and lighting. Basically, we aim to
improve domain adaptation by transferring the style
of the real target domain onto images of the synthetic
source domain. However, fundamental differences in
image composition cannot be learned with such an
I2I method. For this reason, we use the translated
synthetic data in conjunction with unlabelled data
from the real target domain to train our segmentation
model. We propose a training process that consists of
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
132

three phases.
• (a) In the warm-up phase the SSL method is used
to train an initial segmentation model M
0
as the
initial pseudo label generator.
• (b) In the I2I training phase, we use the pseudo
labels from model M
0
and train our generator G
to produce real looking images from synthetic
images.
• (c) In the segmentation training phase, we com-
bine the SSL method with the translated images
by generator G and train our new segmentation
network M
1
.
3.1 Notation
In the following, we will denote S as the source
domain and T as the target domain. X
S
and X
T
are
sets of images sampled from S and T , i.e., synthetic
images and real images, respectively. x
s
∈ X
S
and
x
t
∈ X
T
are images sampled from their respective
image sets X
S
and X
T
.
Both domains S and T share a common set of
categories C. We denote the label of an image x
d
of
domain d ∈ {S , T } as y
d
. In this work y
s
∈ Y
S
gener-
ally is a synthetic segmentation mask and
ˆ
y
t
∈
ˆ
Y
T
is
a segmentation mask that contains pseudo-labels. For
the purpose of this work, the real segmentation labels
y
t
∈ Y
T
are not available for training. L
W,n
i, j,c
(x, y)
denotes a loss function based on image x and label
y that is used to update trainable parameters of a
network W . n is an identifier/name for the loss
function. Note that we often omit the arguments
(x, y) in order to simplify our notation. Also note
that W only indicates which network is updated by
L
n
and thus may also be omitted in more general
statements and definitions. i, j, c are indices that we
use to refer to specific dimensions and or individual
values in the calculated loss if necessary. In general,
we assume multidimensional arrays to be in the order
of height × width × channels.
In this work, we aim to train a segmentation
network F
S
on X
S
(and possibly X
T
) that estimates
Y
T
without the need for any y
t
∈ Y
T
during training,
i.e., we aim to generalise from domain S to domain T
without ever using any labels from T .
3.2 Image-to-Image Translation
In order to generalise to a target domain T we need
to bring our source images X
S
closer to T . In this
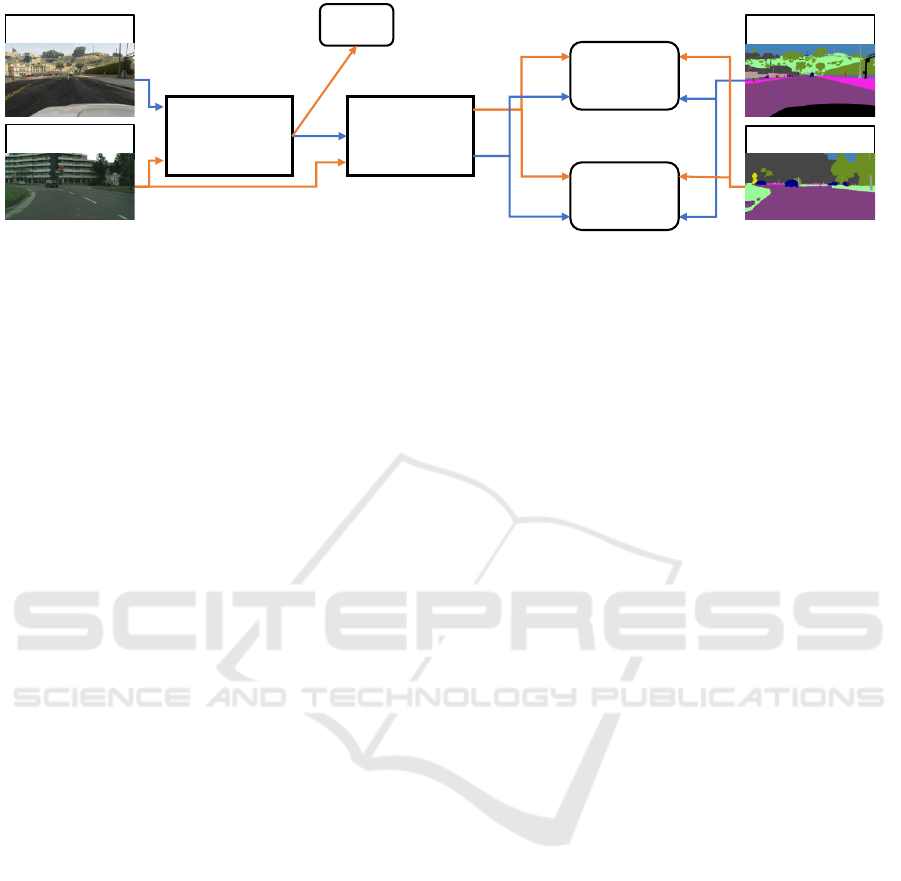
section, we detail our approach to this goal. Figure 1
illustrates the employed architecture. We aim to
transfer images from a synthetic domain to the real
domain, because the synthetic domain allows to easily
create images and corresponding labels by simulating
an environment that is similar to the real environment.
The transformed images are supposed to deliver max-
imum performance on real data when learning a fully
convolutional method for semantic segmentation. In
order to achieve this, such a transformation needs to
meet two major requirements.
1. Transformed images need to look as realistic as
possible
2. Transformed images need to maintain consistency
to the segmentation labels
We propose an I2I method that consists of two net-
works in an adversarial setting. Our learning task
is designed to enforce the requirements given above.
Requirement 1. is tackled by an adversarial objec-
tive. For Requirement 2., we extend the adversarial
setting with an additional cooperative segmentation
objective that is jointly optimised by both adversaries.
Following, we give a brief overview of the employed
generator and discriminator architectures.
Generator. We use a simple encoder-decoder archi-
tecture with strided convolutions for down-sampling
the input image by a factor of 8. These down-
sampling operations are followed by a single residual
block. The decoder is simply a stack of deconvolution
layers. Note that we do not include any skip/residual
connections between encoder and decoder. In every
layer, we append a learned scaling factor as well
as a learned bias term. We use leaky-ReLU acti-
vations for all layers except the output layer. We
also use deconvolution kernels, PixelNorm, Equalized
Learning Rate, Adaptive Instance Normalization and
Stochastic Variation as proposed in (Karras et al.,
2018). Similar to Taigman et al. (Taigman et al.,
2017), we incorporate images from the target domain
in the training of the generator by adding an identity
objective. Thus, the generator learns to encode and
reconstruct real images in addition to its main I2I task.
The additional feedback is a way to directly learn
about the structure and texture of real images.
Discriminator. Instead of discriminating between
generated images and real images directly, we pro-
pose to use prior knowledge for discrimination. We
use image-features of an ImageNet-pretrained (Deng
et al., 2009) VGG16 network (Simonyan and Zisser-
man, 2015) after the block3 conv3 layer. We build
additional 3 residual blocks (He et al., 2016) on top
of these features. Note that we do not fine-tune the
pre-trained VGG16 part of the discriminator. Our
discriminator features two distinct outputs which are
Semantically Consistent Image-to-Image Translation for Unsupervised Domain Adaptation
133
synthetic label
pseudo label
synthetic image
real image
Identity
Loss
Generator
Segmentation
Loss
GAN-Loss +
Classwise
GAN-Loss
Discriminator
Figure 1: Schematic illustration of our proposed I2I method. The colored arrows visualize data-flow.
each computed on top of a separate decoder, as illus-
trated in Figure 1. We refer to these decoders as the
GAN-head (Goodfellow et al., 2014) and the auxiliary
classifier head (AC-head) (Odena et al., 2017). Both
heads output results at image resolution. The task of
the AC-head is to learn semantic segmentation in the
target domain. Thus we feed the translated images
in conjunction with the labels of the synthetic data
as well as real images with corresponding pseudo-
labels. Note that these pseudo-labels can be created
online during training. However, using pseudo-labels
created by our proposed segmentation system that
is detailed in section 3.3 generally improved results.
The AC-head is important in many ways. First,
the segmentation feedback generated in the AC-head
forces previous layers to learn segmentation-specific
features which in turn helps the GAN-head to dis-
criminate between images that are translated from the
synthetic domain and images from the real domain.
Second, it provides consistency feedback for the
generator. We achieve this by propagating gradients
based on the segmentation loss of the AC-head into
the weights of the discriminator as well as into the
weights of the generator. This effectively optimises
a joint segmentation objective in both generator and
discriminator. Thus, the generator is punished if the
translated images are not consistent with the label
of the synthetic input data. Third, it can be used to
generate pseudo-labels. The GAN-Head is responsi-
ble for the discrimination between real examples and
fake examples. Note that GAN-Heads are commonly
learned with a single label only (real or fake). We
extend this formulation to include class information.
Thus, allowing the discriminator to directly learn to
compare images on a class specific level. We utilize
segmentation labels in the GAN-head to create this
class-specific feedback. In GAN-terminology this
means that we treat pseudo-labels as real and the
synthetic labels as fake. For each class, we produce
an additional output feature map. On this feature map,
feedback is only applied at positions that belong to the
given object class as defined by either synthetic labels
or pseudo-labels.
Optimisation. Given the supervised segmenta-
tion loss L
seg
(D(G(x
s
)), y
s
) (softmax cross-entropy)
based on synthetic labels and the supervised segmen-
tation loss L
seg
(D(x
t
),
ˆ
y
t
) based on the pseudo-labels,
we compute the total segmentation loss L
seg
as given
in Equation 1. We use the symmetric cross-entropy
loss (Wang et al., 2019) for L
seg
(D(x
t
),
ˆ
y
t
) because it
increases robustness when using noisy pseudo-labels
ˆ
y
t
.
L
seg
= L
seg
(D(G(x
s
)), y
s
) + λ
pl
L
seg
(D(x
t
),
ˆ
y
t
) (1)
where λ
pl
is a scaling factor that we use to control
the relative impact of the pseudo-labels on the overall
error of the model.
Like the segmentation loss, we calculate the
GAN-Loss L
gan
on a pixel-wise basis, i.e., the GAN-
loss is the average of all losses computed over all pix-
els I
i, j
of an input image I. Let m(a, b) be a derivable
distance metric between a and b. We give a general
error function L
D,dgan
for a discriminator D as well as
a general error function L
G,dgan
for a generator G in
Equation 2 and Equation 3 respectively.
L
D,dgan
i, j
= m(D(G(x
s
))
i, j
, 0) + m(D(x
t
)
i, j
, 1) (2)
L
G,dgan
i, j
= m(D(G(x
s
))
i, j
, 1) (3)
We use the mean-squared error for the distance metric
m.
Now let, y
s
be the one-hot encoded segmentation
label for a given image x
s
, i.e., y
s
i, j,c
equals one if I
i, j
belongs to class c. Otherwise y
s
i, j,c
is zero. The same
applies to the pseudo-label
ˆ
y
t
. We define a class-wise
and pixel-wise error L
D,cgan
i, j,c
for discriminator D in
Equation 4 and a class-wise and pixel-wise error
L
G,cgan
i, j,c
for generator G in Equation 5.
L
D,cgan
i, j,c
= m(D(G(x
s
))
i, j,c
, 0) · y
s
i, j,c
+ (4)
+ m(D(x
t
)
i, j,c
, 1) ·
ˆ
y
t
i, j,c
L
G,cgan
i, j,c
= m(D(G(x
s
))
i, j,c
, 1) · y
s
i, j,c
(5)
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
134

Hence, the full adversarial loss for D is:
L
D,gan
=
H
∑
i=0
W
∑
j=0
L
D,dgan
i, j
+
λ
cgan
|C|
∑
c∈C
L
D,cgan
i, j,c
!
. (6)
where λ
cgan
is a scaling factor that we use to control
the relative impact of the class-wise loss on the overall
error of the model, H is the height and W is the width
of both images and labels. L
G,gan
can be computed
analogous.
The total loss of the discriminator L
D
is a com-
bination of segmentation and GAN losses as given in
Equation 7.
L
D
=
1
HW
L
D,seg
+ L
D,gan
(7)
With L
G,id
being the identity reconstruction error on
a real image x
t
from the target domain, we compute
the generator loss L
G
as given in Equation 9.
L
G,id
=
H
∑
i=0
W
∑
j=0
kG(x
t
)
i, j
− x
t
i, j
k
1
(8)
L
G
=
1
HW
L
G,seg
+ L
G,gan
+ L
G,id
(9)
Note that the second term of L
seg
from Equation 1
is not affected by G and thus L
G,seg
is reduced to
the first term of L
seg
when back-propagating. This
means that G should generate images that match the
synthetic segmentation labels. On the other hand,
L
G,gan
incentivises more realistic images. By using
L
G,id
we are able to show real images from the target
domain to G. This combination of various objectives
enables us to learn an I2I model that satisfies the
requirement of realistic transformation while simulta-
neously keeping consistency with the synthetic labels.
We use the resulting images to subsequently learn a
better segmentation model.
3.3 Segmentation Training
At this point, we are able to transform synthetic
images into real images while keeping the semantic
content of the image unchanged. Thus, we can use the
transformed images with the original synthetic anno-
tations. However, some issues remain to be solved.
An I2I method cannot bridge certain differences be-
tween the domains. The remaining differences are
in image content and include object shapes, object
frequency, and differences in viewpoint which can
not be learned by our I2I module. As a solution,
we incorporate images from the real domain directly
into the training of the segmentation model via a SSL
framework.
Similar to Tarvainen et al. (Tarvainen and Valpola,
2017), we make use of two networks: a student net-
work F
S
and a teacher network F
T
. The architecture
of the teacher network is identical to the one of the
student network. The weights of the teacher model
are an Exponential Moving Average (EMA) of the
student’s weights. Given an image from the target
domain, the teacher’s prediction serves as a label for
the student, forcing consistency in the prediction of
both models under different perturbations.
The overall objective L
F
S
is a combination of
a supervised segmentation loss L
F
S
,seg
and the self-
supervised consistency loss L
F
S
,con
as detailed in
Equation 10.
L
F
S
= L
F
S
,seg
(x
s
, y
s
) + λ
con
L
F
S
,con
(x
t
), (10)
where λ
con
is a trade-off parameter.
For the supervised training, we incorporate syn-
thetic images x
s
∈ X
S
and a transformed version
obtained from the generator G(x
s
) of our proposed
I2I method. We calculate a combined loss L
F
S
,seg
as
given in Equation 11
L
F
S
,seg
= L
seg
((F
S
(x
s
)), y
s
) + L
seg
((F
S
(G(x
s
))), y
s
),
(11)
where L
seg
again is the softmax cross-entropy error.
For the semi-supervised training, we incorporate
images from the real domain x
t
∈ X
T
. We calculate
the consistency loss L
F
S
,con
(x
t
) as given in Equa-
tion 12.
L
F
S
,con
= ||σ(F
T
(x
t
)) − σ(F
S
(P(x
t
)))||
2
2
, (12)
where σ is the softmax activation function and P(x
t
)
is a strongly perturbed version of the input image
x
t
. Similar to (Zhou et al., 2020), we utilise color
jittering, Gaussian blurring and noise as perturbations
on x
t
.
As our I2I model can also leverage pseudo-labels,
we perform an identical training with a supervised
loss and a consistency loss, but without transformed
images G(x
s
) in the warm-up phase. We use the
resulting model to generate pseudo-labels that we use
to train G in the I2I training phase. We then use G
to translate synthetic images. These translated images
in conjunction with the original synthetic images con-
stitute the training data for the segmentation training
phase.
4 EXPERIMENTS AND RESULTS
In this section, we detail experiments that we con-
ducted in order to show the performance of our
Semantically Consistent Image-to-Image Translation for Unsupervised Domain Adaptation
135
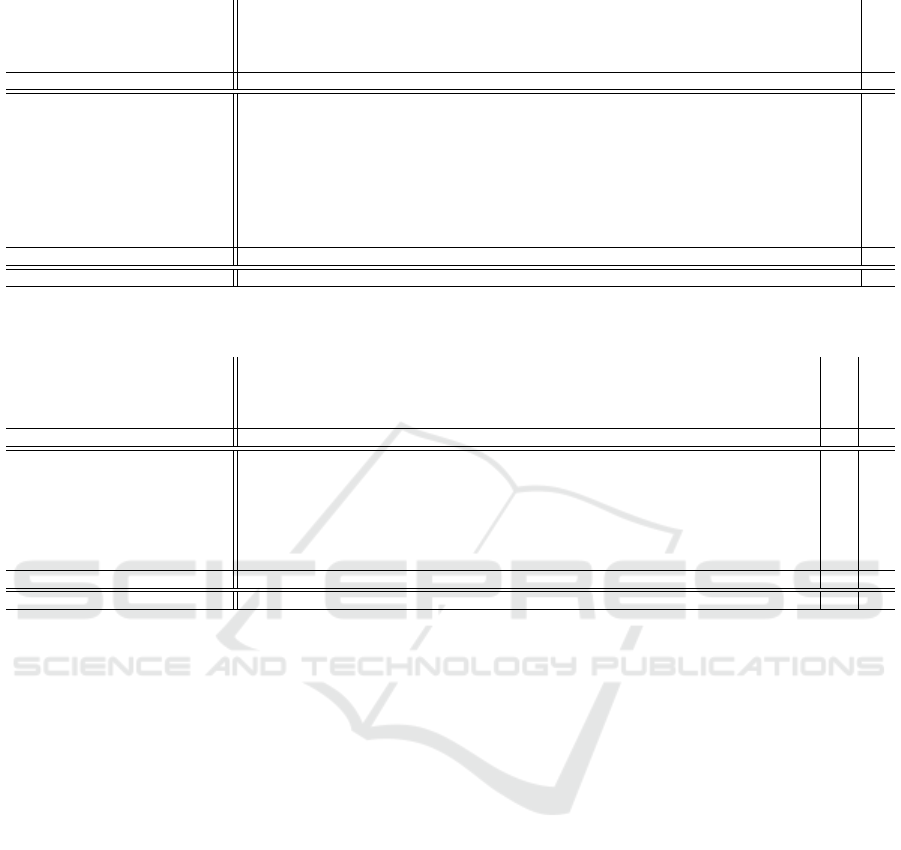
Table 1: Results of domain adaptation from GTA5 to Cityscapes using a VGG backbone.
road
sidewalk
building
wall
fence
pole
traffic light
traffic sign
vegetation
terrain
sky
person
rider
car
truck
bus
train
motorbike
bicycle
mIoU
19
Source only (ours) 79.2 30.6 76.0 22.7 11.1 19.2 11.0 2.2 80.3 30.4 73.5 39.3 0.5 75.3 17.3 9.5 0.0 1.4 0.0 30.5
CyCADA (Hoffman et al., 2018) 85.2 37.2 76.5 21.8 15.0 23.8 22.9 21.5 80.5 31.3 60.7 50.5 9.0 76.9 17.1 28.2 4.5 9.8 0.0 35.4
CBST-SP (Zou et al., 2018) 90.4 50.8 72.0 18.3 9.5 27.2 28.6 14.1 82.4 25.1 70.8 42.6 14.5 76.9 5.9 12.5 1.2 14.0 28.6 36.1
DCAN (Wu et al., 2018) 82.3 26.7 77.4 23.7 20.5 20.4 30.3 15.9 80.9 25.4 69.5 52.6 11.1 79.6 24.9 21.2 1.3 17.0 6.7 36.2
SWD (Lee et al., 2019) 91.0 35.7 78.0 21.6 21.7 31.8 30.2 25.2 80.2 23.9 74.1 53.1 15.8 79.3 22.1 26.5 1.5 17.2 30.4 39.9
SIM (Wang et al., 2020b) 88.1 35.8 83.1 25.8 23.9 29.2 28.8 28.6 83.0 36.7 82.3 53.7 22.8 82.3 26.4 38.6 0.0 19.6 17.1 42.4
TGCF-DA + SE (Choi et al., 2019) 90.2 51.5 81.1 15.0 10.7 37.5 35.2 28.9 84.1 32.7 75.9 62.7 19.9 82.6 22.9 28.3 0.0 23.0 25.4 42.5
FADA (Wang et al., 2020a) 92.3 51.1 83.7 33.1 29.1 28.5 28.0 21.0 82.6 32.6 85.3 55.2 28.8 83.5 24.4 37.4 0.0 21.1 15.2 43.8
PCEDA (Yang et al., 2020) 90.2 44.7 82.0 28.4 28.4 24.4 33.7 35.6 83.7 40.5 75.1 54.4 28.2 80.3 23.8 39.4 0.0 22.8 30.8 44.6
Zhou et al. (Zhou et al., 2020) 95.1 66.5 84.7 35.1 19.8 31.2 35.0 32.1 86.2 43.4 82.5 61.0 25.1 87.1 35.3 46.1 0.0 24.6 17.5 47.8
Ours 94.4 65.3 85.9 39.0 22.2 35.4 39.1 37.3 86.7 42.3 88.1 62.7 36.2 87.6 33.8 45.0 0.0 26.5 24.2 50.1
Target only (ours) 96.9 79.7 89.6 46.0 47.6 47.4 55.9 64.5 90.0 60.7 91.7 72.4 49.1 92.4 56.7 75.4 54.0 51.0 69.4 68.0
Table 2: Results of domain adaptation from SYNTHIA to Cityscapes using a VGG backbone. mIoU
16
and mIoU
13
are
computed on 16 and 13 classes respectively. * means that classes are included in mIoU
16
but excluded in mIoU
13
.
road
sidewalk
building
wall*
fence*
pole*
traffic light
traffic sign
vegetation
sky
person
rider
car
bus
motorbike
bicycle
mIoU
16
mIoU
13
Source only (ours) 42.0 19.6 60.4 6.3 0.1 28.3 2.1 10.3 76.2 76.0 44.3 7.2 62.5 14.8 3.2 10.6 29.0 33.0
DCAN (Wu et al., 2018) 79.9 30.4 70.8 1.6 0.6 22.3 6.7 23.0 76.9 73.9 41.9 16.7 61.7 11.5 10.3 38.6 35.4 -
CBST (Zou et al., 2018) 69.6 28.7 69.5 12.1 0.1 25.4 11.9 13.6 82.0 81.9 49.1 14.5 66.0 6.6 3.7 32.4 35.4 40.7
SWD (Lee et al., 2019) 83.3 35.4 82.1 - - - 12.2 12.6 83.8 76.5 47.4 12.0 71.5 17.9 1.6 29.7 - 43.5
FADA (Wang et al., 2020a) 80.4 35.9 80.9 2.5 0.3 30.4 7.9 22.3 81.8 83.6 48.9 16.8 77.7 31.1 13.5 17.9 39.5 46.0
TGCF-DA + SE (Choi et al., 2019) 90.1 48.6 80.7 2.2 0.2 27.2 3.2 14.3 82.1 78.4 54.4 16.4 82.5 12.3 1.7 21.8 38.5 46.6
PCEDA (Yang et al., 2020) 79.7 35.2 78.7 1.4 0.6 23.1 10.0 28.9 79.6 81.2 51.2 25.1 72.2 24.1 16.7 50.4 41.1 48.7
Zhou et al. (Zhou et al., 2020) 93.1 53.2 81.1 2.6 0.6 29.1 7.8 15.7 81.7 81.6 53.6 20.1 82.7 22.9 7.7 31.3 41.5 48.6
Ours 94.8 67.2 81.9 6.1 0.1 29.6 0.1 19.7 82.2 81.1 50.2 17.0 84.6 30.8 12.4 25.1 42.7 49.8
Target only (ours) 96.9 79.7 89.6 46.0 47.6 47.4 55.9 64.5 90.0 91.7 72.4 49.1 92.4 75.4 51.0 69.4 70.0 75.4
proposed methods. In Section 4.1 we shortly intro-
duce the datasets that we used. In Section 4.2 we
give important details on the training and validation
protocols. In Section 4.3 we compare our methods
to previous state-of-the art methods on two public
benchmarks. In Section 4.4 we conduct an ablation
study to show the impact of individual components
on our results.
4.1 Datasets
Following common practice for unsupervised domain
adaptation in semantic segmentation, we use the
GTA5 (Richter et al., 2016) and SYNTHIA (Ros
et al., 2016) datasets as our synthetic domain and the
Cityscapes dataset (Cordts et al., 2016) as our real
domain. The datasets are detailed below.
Cityscapes: dataset (Cordts et al., 2016) contains
images of urban street scenes collected around Ger-
many and neighbouring countries. It consists of a
training set with 2975 images and a validation set
of 500 images. We report mIoU
19
for the 19 object
classes that are annotated. We also use the available
89250 unlabeled images for learning our I2I method.
GTA5: dataset (Richter et al., 2016) contains im-
ages rendered by the game Grand Theft Auto 5. It
consists of 24966 images with corresponding pixel-
level semantic segmentation annotations and a set of
object classes that is compatible to the annotations of
the Cityscapes dataset.
SYNTHIA: dataset (Ros et al., 2016) consists of
a collection of images rendered from a virtual city.
We use the SYNTHIA-RAND-CITYSCAPES subset,
which consists of 9400 images with pixel-wise anno-
tations. Note that the terrain, truck, train classes are
not annotated in the SYNTHIA dataset. Thus, we use
the remaining 16 classes that are common with the
Cityscapes dataset. We evaluate mIoU
16
on these 16
classes and mIoU
13
on a subset of 13 classes. mIoU
13
is a common metric for evaluation on the SYNTHIA
dataset that excludes certain classes that are especially
hard and/or underrepresented in the data.
4.2 Implementation Details
For a fair comparison to previous work (Choi et al.,
2019; Zhou et al., 2020), we adopt the VGG16 back-
bone (Simonyan and Zisserman, 2015) pre-trained
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
136

on the ImageNet dataset (Deng et al., 2009). Fol-
lowing Deeplab-v2 (Chen et al., 2018), we incor-
porate Atrous Spatial Pyramid Pooling (ASPP) as
the decoder and use an bi-linear up-sampling to get
the segmentation output at image resolution. We
use this model for all our experiments. We use
the Adam optimiser (Kingma and Ba, 2015) for the
segmentation training with an initial learning rate of
1 × 10
−5
and exponential weight decay. The gen-
erator and discriminator are trained with a constant
learning rate of 1 × 10
−5
for 1 million iterations.
For validation purposes, we keep exponential moving
averages of the generator weights. We use a 50/50
split of synthetic and transformed data to learn the
segmentation model. All networks are trained with
gradient clipping at a global norm of 5. We set all
EMA decay values to 0.999. During the first 10.000
training steps of F
S
, we keep λ
con
to zero. We report
results of the teacher network which is a smoothed
version of the trained segmentation network. We
fade λ
pseudo
and λ
cgan
linearly from zero at iteration
20,000 to 0.3 at iteration 100,000 when learning
with pseudo-labels created online. When learning
with pre-computed pseudo-labels from our proposed
segmentation model, we keep λ
pseudo
and λ
cgan
at
0.3 at all times. All images in all experiments are
re-scaled such that the longer side is 1024 pixels.
For training, we crop 384 × 384 regions from these
images.
4.3 Comparisons with the
State-of-the-Art
We compare the results of our method to state-of-the-
art methods that combine I2I and SSL on the two
standard benchmarks: “GTA5 → Cityscapes” and
“SYNTHIA → Cityscapes” in Table 1 and Table 2,
respectively. Our method improves upon current
state-of-the art in both benchmarks. Like many other
methods, we suffer from fundamental differences in
the definition of certain objects, e.g., the train class
in the Cityscapes dataset which includes objects like
street-cars is actually very similar to the bus class
in the GTA5 dataset (Zhang et al., 2017). Such a
difference obviously impacts performance on both
classes. Indeed, due to the similarity of buses in
the source data to trains in the target data, we would
actually expect the converted buses to incorporate
certain features of the target trains. During segmenta-
tion training, we then actively enforce predictions for
the bus class which ultimately results in poor perfor-
mance. We identified an additional issue that affects
the car and truck annotations in the GTA5 dataset.
Here, one of the synthetic car models is consistently
Table 3: Ablation study for the proposed image-to-image
translation method from the synthetic GTA5 dataset to
the Cityscapes dataset. We report mean mIoU
19
on the
Cityscapes validation set.
Component mIoU
19
LSGAN (Mao et al., 2017) 43.9
SGAN (Goodfellow et al., 2014) 42.9
w/o L
D,G,clsgan
42.7
w/o L
G,seg
38.1
w/o pre-computed pseudo-labels 40.0
annotated with the truck label. We think that our
method that directly enforces label consistency is
overly prone to such differences and errors in the
annotations. Also note that domain adaptation from
SYNTHIA to Cityscapes, in general, is inferior to the
variant trained on the GTA5 dataset. The domain gap
between the SYNTHIA dataset and the Cityscapes
dataset is simply wider than the gap between GTA5
and Cityscapes. This is mainly due to the fact that
the viewpoint in the scenes in the SYNTHIA dataset
varies a lot while Cityscapes and GTA5 mainly show
scenes from the viewpoint of a pedestrian or the
viewpoint of a driver. The SYNTHIA dataset also
consists of less annotated images. Common practice
excludes many of the hard classes which results in
mIoU
13
scores being very similar to the mIoU
19
scores that we obtain when training with the GTA5
dataset. The above-mentioned issues apply to most
methods. However, our method outperforms other
methods. Thus, in the next section, we conduct
an ablation study to identify the contribution of the
individual components of our method to this outper-
formance.
4.4 Ablation Study
In this section, we conduct an ablation study on
various components of our proposed method. In
addition, we compare different components directly
to their counterparts in similar methods (Choi et al.,
2019; Zhou et al., 2020). We also analyse the
remaining domain gap to get a better understanding
of our results.
Image-to-Image Translation. The results of the
ablation study are shown in Table 3. For simplicity,
we omit the SSL part of the third stage of our method,
i.e., we use the images from our I2I method to learn
a segmentation model in a purely supervised fashion.
We train on 50% source data and 50% translated data.
As expected, our performance is highly dependent on
the semantic consistency loss L
G,seg
from Equation 9
that we use to supervise the generator. We lose ≈
Semantically Consistent Image-to-Image Translation for Unsupervised Domain Adaptation
137

Table 4: Ablation study and comparison to existing similar
work. We evaluate and compare the image translation and
constancy regularization. We report results from GTA5
to Cityscapes. L
F
S
,seg
is the segmentation loss defined in
Equation 11. SSL refers to the consistency loss L
F
s
,con
as
defined in Equation 12. I2I means that we use translated
images from our proposed I2I method.
Method Component mIoU
Source only (ours) L
F
S
,seg
30.5
(Choi et al., 2019) L
F
S
,seg
+ SSL 32.6
(Zhou et al., 2020) L
F
S
,seg
+ SSL 35.6
Ours L
F
S
,seg
+ SSL 39.2
(Choi et al., 2019) L
F
S
,seg
+ I2I 35.4
(Zhou et al., 2020) L
F
S
,seg
+ I2I 35.1
Ours L
F
S
,seg
+ I2I 43.9
(Choi et al., 2019) L
F
S
,seg
+ SSL + I2I 42.5
(Zhou et al., 2020) L
F
S
,seg
+ SSL + I2I 47.8
Ours L
F
S
,seg
+ SSL + I2I 50.1
5.7% mIoU
19
absolute performance by removing this
component which demonstrates the effectiveness of
our approach. Note that this ablation evaluates the im-
pact of L
G,seg
. L
D,seg
is still applied during training,
i.e., the discriminator has access to the segmentation
information but is not able to properly transfer this
information to the generator. This can be improved by
applying L
G,seg
during training which explicitly en-
forces the transfer of segmentation knowledge. Note
that our method is still able to deliver 40% mIoU
19
when using simple pseudo-labels created online dur-
ing training from the output of the AC-head, i.e., if we
train without pseudo-labels supplied by an external
method. Nevertheless, using higher quality pseudo-
labels from the proposed segmentation method in-
creases performance by an absolute 3.8% mIoU
19
.
Removing the class-wise GAN feedback reduces per-
formance by around 1.2% mIoU
19
. Swapping the
LSGAN target to a standard GAN (SGAN) target
reduces performance by ≈ 1% mIoU
19
.
Figure 2 shows examples of transformed synthetic
images. We observe that the textures of roads and
trees look much more realistic. Also, the sky is
generally more cloudy which is very characteristic for
the Cityscapes dataset.
Comparison with Similar Methods. In Table 4,
we compare our two main components to the main
components of similar work by Choi et al. (Choi et al.,
2019) and Zhou et al. (Zhou et al., 2020). We com-
pare the components in isolation and in combination.
Both components improve performance substantially
upon previous work. We can clearly see that the
improvement of the I2I method is predominantly
achieved through the semantic consistency frame-
Table 5: Domain gap evaluation. Our method closes the
domain gap between GTA5 and Cityscapes by 68.3%.
mIoU
19
domain gap
Cityscapes Model 68.0 0.0%
Source only 39.6 100.0%
Ours 59.0 31.7%
work that we described in subsection 3.2. However, in
Table 3, we can also clearly see, that the performance
of our I2I method is heavily impacted by the quality of
the pseudo-labels. This shows that both components
benefit each other.
4.5 Domain Gap Analysis
In order to estimate the remaining domain gap we
retrain the linear classification layer of the segmenta-
tion model on real labels from the Cityscapes dataset.
We compare to a model that is trained on Cityscapes
only. The results are summarised in Table 5. We argue
that retraining the classification layer is necessary for
a proper comparison because it allows to overcome
fundamental differences in class annotations between
the synthetic source and the real target data. In
essence, this means that we evaluate the quality of the
learned features and their applicability to data from
the target domain. In this context, feature quality
refers to the linear separability of the object classes
from the Cityscapes dataset in the features. This
linear separability can be assessed by training a linear
classifier on top of these features. Such an approach
is commonly referred to as a linear probe (Alain and
Bengio, 2017). We argue that a supervised model that
is trained on annotated data from the target domain
gives a reasonable upper bound on the achievable
segmentation performance. The total domain gap
between the target domain T and the source domain
S then is the difference between the performance of
this model and a model trained on source data only.
Again, we retrain the linear classification layer of this
source model with data from the target domain. This
source model achieves 39.6% mIoU
19
compared to
the upper bound of 68.0% mIoU
19
. Thus, we can
conclude that the total domain gap between S and T
is equal to 28.4% mIoU
19
points. In comparison, our
method achieves 59.0% mIoU
19
when retraining the
classification layer. This reduces our estimate of the
remaining domain gap to ≈ 9%. This equals a reduc-
tion of the domain gap by 68.3% when compared to
the model that is trained on source data only.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
138

Figure 2: Examples of translated images. The left column shows synthetic images from the GTA5 dataset. The right column
shows the corresponding translated images.
5 CONCLUSION
In this work, we have investigated the problem of
unsupervised domain adaptation for semantic seg-
mentation. We proposed two complementary ap-
proaches in order to reduce the gap between the
data of a synthetic source domain and the real-world
target domain. More specifically, we have shown
that an adversarial image-to-image translation model
that is trained with an auxiliary segmentation task
on images of both domains yields significantly better
results. We show that pseudo-labels can be leveraged
to improve this process. The combination of the
proposed methods outperforms previous state-of-the-
art combinations of image-to-image translation and
semi-supervised learning for domain adaptation on
relevant benchmarks by a considerable margin.
REFERENCES
Alain, G. and Bengio, Y. (2017). Understanding intermedi-
ate layers using linear classifier probes. In 5th Interna-
tional Conference on Learning Representations, ICLR
2017, Toulon, France, April 24-26, 2017, Workshop
Track Proceedings. OpenReview.net. 8
Chen, L., Papandreou, G., Kokkinos, I., Murphy, K., and
Yuille, A. L. (2018). Deeplab: Semantic image
segmentation with deep convolutional nets, atrous
convolution, and fully connected crfs. IEEE Trans.
Pattern Anal. Mach. Intell., 40(4):834–848. 2, 7
Chen, Y., Chen, W., Chen, Y., Tsai, B., Wang, Y. F., and
Sun, M. (2017). No more discrimination: Cross city
adaptation of road scene segmenters. In IEEE Inter-
national Conference on Computer Vision, ICCV 2017,
Venice, Italy, October 22-29, 2017, pages 2011–2020.
IEEE Computer Society. 2
Chen, Y., Lin, Y., Yang, M., and Huang, J. (2019). Crdoco:
Pixel-level domain transfer with cross-domain consis-
tency. In IEEE Conference on Computer Vision and
Pattern Recognition, CVPR 2019, Long Beach, CA,
USA, June 16-20, 2019, pages 1791–1800. Computer
Vision Foundation / IEEE. 2
Choi, J., Kim, T., and Kim, C. (2019). Self-ensembling
with gan-based data augmentation for domain adap-
tation in semantic segmentation. In 2019 IEEE/CVF
International Conference on Computer Vision, ICCV
2019, Seoul, Korea (South), October 27 - November
2, 2019, pages 6829–6839. IEEE. 2, 6, 7, 8
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler,
M., Benenson, R., Franke, U., Roth, S., and Schiele,
B. (2016). The cityscapes dataset for semantic ur-
ban scene understanding. In 2016 IEEE Conference
on Computer Vision and Pattern Recognition, CVPR
2016, Las Vegas, NV, USA, June 27-30, 2016, pages
3213–3223. IEEE Computer Society. 6
Deng, J., Dong, W., Socher, R., Li, L., Li, K., and Fei-Fei,
L. (2009). Imagenet: A large-scale hierarchical image
database. In 2009 IEEE Computer Society Conference
Semantically Consistent Image-to-Image Translation for Unsupervised Domain Adaptation
139

on Computer Vision and Pattern Recognition (CVPR
2009), 20-25 June 2009, Miami, Florida, USA, pages
248–255. IEEE Computer Society. 3, 7
Goodfellow, I. J., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A. C., and
Bengio, Y. (2014). Generative adversarial nets. In
Ghahramani, Z., Welling, M., Cortes, C., Lawrence,
N. D., and Weinberger, K. Q., editors, Advances in
Neural Information Processing Systems 27: Annual
Conference on Neural Information Processing Sys-
tems 2014, December 8-13 2014, Montreal, Quebec,
Canada, pages 2672–2680. 4, 7
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep
residual learning for image recognition. In 2016
IEEE Conference on Computer Vision and Pattern
Recognition, CVPR 2016, Las Vegas, NV, USA, June
27-30, 2016, pages 770–778. IEEE Computer Society.
3
Hoffman, J., Tzeng, E., Park, T., Zhu, J., Isola, P., Saenko,
K., Efros, A. A., and Darrell, T. (2018). Cycada:
Cycle-consistent adversarial domain adaptation. In
Dy, J. G. and Krause, A., editors, Proceedings of the
35th International Conference on Machine Learning,
ICML 2018, Stockholmsm
¨
assan, Stockholm, Sweden,
July 10-15, 2018, volume 80 of Proceedings of Ma-
chine Learning Research, pages 1994–2003. PMLR.
2, 6
Hoffman, J., Wang, D., Yu, F., and Darrell, T. (2016). Fcns
in the wild: Pixel-level adversarial and constraint-
based adaptation. CoRR, abs/1612.02649. 2
Hong, W., Wang, Z., Yang, M., and Yuan, J. (2018).
Conditional generative adversarial network for struc-
tured domain adaptation. In 2018 IEEE Confer-
ence on Computer Vision and Pattern Recognition,
CVPR 2018, Salt Lake City, UT, USA, June 18-22,
2018, pages 1335–1344. Computer Vision Foundation
/ IEEE Computer Society. 2
Karras, T., Aila, T., Laine, S., and Lehtinen, J. (2018).
Progressive growing of gans for improved quality, sta-
bility, and variation. In 6th International Conference
on Learning Representations, ICLR 2018, Vancouver,
BC, Canada, April 30 - May 3, 2018, Conference
Track Proceedings. OpenReview.net. 3
Ke, Z., Wang, D., Yan, Q., Ren, J. S. J., and Lau, R.
W. H. (2019). Dual student: Breaking the limits
of the teacher in semi-supervised learning. In 2019
IEEE/CVF International Conference on Computer Vi-
sion, ICCV 2019, Seoul, Korea (South), October 27 -
November 2, 2019, pages 6727–6735. IEEE. 2
Kingma, D. P. and Ba, J. (2015). Adam: A method for
stochastic optimization. In Bengio, Y. and LeCun,
Y., editors, 3rd International Conference on Learning
Representations, ICLR 2015, San Diego, CA, USA,
May 7-9, 2015, Conference Track Proceedings. 7
Lee, C., Batra, T., Baig, M. H., and Ulbricht, D. (2019).
Sliced wasserstein discrepancy for unsupervised do-
main adaptation. In IEEE Conference on Computer
Vision and Pattern Recognition, CVPR 2019, Long
Beach, CA, USA, June 16-20, 2019, pages 10285–
10295. Computer Vision Foundation / IEEE. 6
Lee, D.-H. (2013). Pseudo-label: The simple and efficient
semi-supervised learning method for deep neural net-
works. In Workshop on challenges in representation
learning, ICML, volume 3, page 896. 2
Long, J., Shelhamer, E., and Darrell, T. (2015). Fully
convolutional networks for semantic segmentation. In
IEEE Conference on Computer Vision and Pattern
Recognition, CVPR 2015, Boston, MA, USA, June 7-
12, 2015, pages 3431–3440. IEEE Computer Society.
2
Mao, X., Li, Q., Xie, H., Lau, R. Y. K., Wang, Z., and Smol-
ley, S. P. (2017). Least squares generative adversarial
networks. In IEEE International Conference on Com-
puter Vision, ICCV 2017, Venice, Italy, October 22-29,
2017, pages 2813–2821. IEEE Computer Society. 7
Murez, Z., Kolouri, S., Kriegman, D. J., Ramamoorthi,
R., and Kim, K. (2018). Image to image translation
for domain adaptation. In 2018 IEEE Conference
on Computer Vision and Pattern Recognition, CVPR
2018, Salt Lake City, UT, USA, June 18-22, 2018,
pages 4500–4509. Computer Vision Foundation /
IEEE Computer Society. 2
Odena, A., Olah, C., and Shlens, J. (2017). Conditional
image synthesis with auxiliary classifier gans. In
Precup, D. and Teh, Y. W., editors, Proceedings of the
34th International Conference on Machine Learning,
ICML 2017, Sydney, NSW, Australia, 6-11 August
2017, volume 70 of Proceedings of Machine Learning
Research, pages 2642–2651. PMLR. 4
Pizzati, F., de Charette, R., Zaccaria, M., and Cerri, P.
(2020). Domain bridge for unpaired image-to-image
translation and unsupervised domain adaptation. In
IEEE Winter Conference on Applications of Computer
Vision, WACV 2020, Snowmass Village, CO, USA,
March 1-5, 2020, pages 2979–2987. IEEE. 2
Richter, S. R., Vineet, V., Roth, S., and Koltun, V. (2016).
Playing for data: Ground truth from computer games.
In Leibe, B., Matas, J., Sebe, N., and Welling, M., ed-
itors, Computer Vision - ECCV 2016 - 14th European
Conference, Amsterdam, The Netherlands, October
11-14, 2016, Proceedings, Part II, volume 9906 of
Lecture Notes in Computer Science, pages 102–118.
Springer. 6
Ros, G., Sellart, L., Materzynska, J., V
´
azquez, D., and
L
´
opez, A. M. (2016). The SYNTHIA dataset: A large
collection of synthetic images for semantic segmen-
tation of urban scenes. In 2016 IEEE Conference
on Computer Vision and Pattern Recognition, CVPR
2016, Las Vegas, NV, USA, June 27-30, 2016, pages
3234–3243. IEEE Computer Society. 6
Sankaranarayanan, S., Balaji, Y., Jain, A., Lim, S., and
Chellappa, R. (2018). Learning from synthetic data:
Addressing domain shift for semantic segmentation.
In 2018 IEEE Conference on Computer Vision and
Pattern Recognition, CVPR 2018, Salt Lake City, UT,
USA, June 18-22, 2018, pages 3752–3761. Computer
Vision Foundation / IEEE Computer Society. 2
Simonyan, K. and Zisserman, A. (2015). Very deep convo-
lutional networks for large-scale image recognition. In
Bengio, Y. and LeCun, Y., editors, 3rd International
Conference on Learning Representations, ICLR 2015,
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
140

San Diego, CA, USA, May 7-9, 2015, Conference
Track Proceedings. 3, 6
Taigman, Y., Polyak, A., and Wolf, L. (2017). Unsupervised
cross-domain image generation. In 5th International
Conference on Learning Representations, ICLR 2017,
Toulon, France, April 24-26, 2017, Conference Track
Proceedings. OpenReview.net. 3
Tarvainen, A. and Valpola, H. (2017). Mean teachers
are better role models: Weight-averaged consistency
targets improve semi-supervised deep learning results.
In Guyon, I., von Luxburg, U., Bengio, S., Wallach,
H. M., Fergus, R., Vishwanathan, S. V. N., and
Garnett, R., editors, Advances in Neural Information
Processing Systems 30: Annual Conference on Neural
Information Processing Systems 2017, December 4-9,
2017, Long Beach, CA, USA, pages 1195–1204. 2, 5
Toldo, M., Maracani, A., Michieli, U., and Zanuttigh, P.
(2020). Unsupervised domain adaptation in semantic
segmentation: a review. CoRR, abs/2005.10876. 2
van Engelen, J. E. and Hoos, H. H. (2020). A survey on
semi-supervised learning. Mach. Learn., 109(2):373–
440. 2
Wang, H., Shen, T., Zhang, W., Duan, L., and Mei, T.
(2020a). Classes matter: A fine-grained adversarial
approach to cross-domain semantic segmentation. In
Vedaldi, A., Bischof, H., Brox, T., and Frahm, J.,
editors, Computer Vision - ECCV 2020 - 16th Euro-
pean Conference, Glasgow, UK, August 23-28, 2020,
Proceedings, Part XIV, volume 12359 of Lecture
Notes in Computer Science, pages 642–659. Springer.
6
Wang, J., Sun, K., Cheng, T., Jiang, B., Deng, C., Zhao,
Y., Liu, D., Mu, Y., Tan, M., Wang, X., Liu, W., and
Xiao, B. (2021). Deep high-resolution representation
learning for visual recognition. IEEE Trans. Pattern
Anal. Mach. Intell., 43(10):3349–3364. 2
Wang, Y., Ma, X., Chen, Z., Luo, Y., Yi, J., and Bailey, J.
(2019). Symmetric cross entropy for robust learning
with noisy labels. In 2019 IEEE/CVF International
Conference on Computer Vision, ICCV 2019, Seoul,
Korea (South), October 27 - November 2, 2019, pages
322–330. IEEE. 4
Wang, Z., Yu, M., Wei, Y., Feris, R., Xiong, J., Hwu,
W., Huang, T. S., and Shi, H. (2020b). Differential
treatment for stuff and things: A simple unsupervised
domain adaptation method for semantic segmentation.
In 2020 IEEE/CVF Conference on Computer Vision
and Pattern Recognition, CVPR 2020, Seattle, WA,
USA, June 13-19, 2020, pages 12632–12641. Com-
puter Vision Foundation / IEEE. 6
Wu, Z., Han, X., Lin, Y., Uzunbas, M. G., Goldstein,
T., Lim, S., and Davis, L. S. (2018). DCAN: dual
channel-wise alignment networks for unsupervised
scene adaptation. In Ferrari, V., Hebert, M., Smin-
chisescu, C., and Weiss, Y., editors, Computer Vision
- ECCV 2018 - 15th European Conference, Munich,
Germany, September 8-14, 2018, Proceedings, Part V,
volume 11209 of Lecture Notes in Computer Science,
pages 535–552. Springer. 6
Xie, Q., Luong, M., Hovy, E. H., and Le, Q. V. (2020).
Self-training with noisy student improves imagenet
classification. In 2020 IEEE/CVF Conference on
Computer Vision and Pattern Recognition, CVPR
2020, Seattle, WA, USA, June 13-19, 2020, pages
10684–10695. Computer Vision Foundation / IEEE.
2
Yang, Y., Lao, D., Sundaramoorthi, G., and Soatto, S.
(2020). Phase consistent ecological domain adapta-
tion. In 2020 IEEE/CVF Conference on Computer
Vision and Pattern Recognition, CVPR 2020, Seattle,
WA, USA, June 13-19, 2020, pages 9008–9017. Com-
puter Vision Foundation / IEEE. 6
Yu, F. and Koltun, V. (2016). Multi-scale context aggrega-
tion by dilated convolutions. In Bengio, Y. and LeCun,
Y., editors, 4th International Conference on Learning
Representations, ICLR 2016, San Juan, Puerto Rico,
May 2-4, 2016, Conference Track Proceedings. 2
Zhang, Y., David, P., and Gong, B. (2017). Curriculum
domain adaptation for semantic segmentation of urban
scenes. In IEEE International Conference on Com-
puter Vision, ICCV 2017, Venice, Italy, October 22-29,
2017, pages 2039–2049. IEEE Computer Society. 7
Zhou, Q., Feng, Z., Cheng, G., Tan, X., Shi, J., and Ma,
L. (2020). Uncertainty-aware consistency regulariza-
tion for cross-domain semantic segmentation. CoRR,
abs/2004.08878. 5, 6, 7, 8
Zhu, J., Park, T., Isola, P., and Efros, A. A. (2017). Unpaired
image-to-image translation using cycle-consistent ad-
versarial networks. In IEEE International Conference
on Computer Vision, ICCV 2017, Venice, Italy, Octo-
ber 22-29, 2017, pages 2242–2251. IEEE Computer
Society. 2
Zou, Y., Yu, Z., Kumar, B. V. K. V., and Wang, J.
(2018). Unsupervised domain adaptation for seman-
tic segmentation via class-balanced self-training. In
Ferrari, V., Hebert, M., Sminchisescu, C., and Weiss,
Y., editors, Computer Vision - ECCV 2018 - 15th
European Conference, Munich, Germany, September
8-14, 2018, Proceedings, Part III, volume 11207 of
Lecture Notes in Computer Science, pages 297–313.
Springer. 6
Semantically Consistent Image-to-Image Translation for Unsupervised Domain Adaptation
141
