
P
2
Ag: Perception Pipeline in Agriculture for Robotic Harvesting of
Tomatoes
Soofiyan Atar
1 a
, Simranjeet Singh
1 b
, Jaison Jose
2 c
and Kavi Arya
1 d
1
Indian Institute of Technology Bombay, Mumbai, India
2
St. Vincent Pallotti College of Engineering and Technology, Nagpur, India
Keywords:
Robotic Harvesting, Semantic Map, Instance Segmentation, Image Classification.
Abstract:
Harvesting tomatoes in agriculture is a time-consuming and repetitive task. Different techniques such as ac-
curate detection, classification, and exact location of tomatoes must be utilized to automate harvesting tasks.
This paper proposes a perception pipeline (P
2
Ag) that can effectively harvest tomatoes using instance segmen-
tation, classification, and semantic mapping techniques. P
2
Ag is highly optimized for embedded hardware in
terms of performance, computational power and cost. It provides decision-making approaches for harvesting
along with perception techniques, using a semantic map of the environment. This research offers an end-
to-end perception solution for autonomous agricultural harvesting. To evaluate our approach, we designed a
simulator environment with tomato plants and a stereo-vision sensor. This paper reports results on detecting
tomatoes (actual and simulated ) and marking each tomato’s location in 3D space. In addition, the evaluation
shows that the proposed P
2
Ag outperforms the state-of-the-art implementations.
1 INTRODUCTION
During the last decade, the agriculture sector in In-
dia has experienced a sharp drop in the availabil-
ity of labour despite the sector contributing signifi-
cantly to the overall growth of the Indian economy.
Even though India has the second-largest workforce
globally, all sectors of the economy have been af-
fected by the scarcity of labour, the impact being felt
more in the agricultural sector (Prabakar et al., 2011;
Deshingkar, 2003). The agricultural workforce re-
duced by 30.57 million, with numbers dropping from
259 million in 2004-05 to 228 million in 2011-12
(ICRISAT, 2020). Automation in agriculture (Ku,
2019) has many benefits such as labour efficiency,
reduced environmental footprint, increase in produc-
tion, and many more.
In recent years there have been many contri-
butions related to computer vision (Tian et al.,
2019), (TOMBE, 2020) for agricultural environ-
ments, including classification (Ma et al., 2020), de-
tection (Zhao et al., 2019), analysis and monitoring
a
https://orcid.org/0000-0002-0878-9347
b
https://orcid.org/0000-0002-8297-1470
c
https://orcid.org/0000-0002-4132-1359
d
https://orcid.org/0000-0002-7601-317X
(Lakhiar et al., 2018) of fruits. Fruits have differ-
ent characteristics such as maturity, firmness, uni-
formity of size and shape, defects, skin colour and
flesh colour. According to these factors, decision-
making algorithms act on these factors for further
progress/action. In agricultural environments (Do-
kic et al., 2020), computer vision algorithms are now
commonly used for autonomous farming. In recent
years, deep learning has achieved remarkable suc-
cess in image classification, object tracking, and ob-
ject detection algorithms. Moreover, Graphics Pro-
cessing Units (GPUs) evolution has empowered com-
plex deep neural networks and resource-efficient tech-
niques. However, these advancements occur with
higher power consumption and cost, which is not
good for small sized Autonomous Mobile Agricul-
tural Robots (AMAR). Our AMAR, as shown in Fig-
ure 1 has a small number of sensors with limited hard-
ware capability and power capacity. Low computa-
tional algorithms are better suited by not compromis-
ing on accuracy and efficiency. The server-based ap-
proach (Bakar Siddik et al., 2018; Zamora-Izquierdo
et al., 2019) is the most common application to avoid
computational dilemmas. However, this approach is
server-dependent, leading to many problems such as
no response from the server, low latency and hard-
ware failure. The perception pipeline is necessary,
Atar, S., Singh, S., Jose, J. and Arya, K.
P2Ag: Perception Pipeline in Agriculture for Robotic Harvesting of Tomatoes.
DOI: 10.5220/0010786100003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 3, pages 121-129
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
121

which includes low computational complexity, data
efficiency and server independence.
Figure 1: Custom AMAR housing few sensors with limited
hardware capability.
A standard approach for segmenting each fruit
is to transform the image into diverse regions with
discriminative features and transfer to the complex
deep neural network, detailing each region with a
distinct label. Images in the agricultural environ-
ment centred on fruits generally lead to a broad range
of intra-class fluctuations due to illumination, occlu-
sion, clustering, camera viewpoint and seasonal ma-
turity (translating to different fruit sizes, shapes, and
colours). Former work on these challenges utilizes
hand-engineered features to encode visual properties
for classifying fruits (Payne et al., 2014). However,
these algorithms are designed for a particular dataset
by encoding features for specific fruit and conditions,
making these approaches non-transferable to other
crops/datasets. For the detection and delineation of
each distinct fruit using masks, instance segmenta-
tion (Bolya et al., 2019; Hafiz and Bhat, 2020) ap-
proaches are used. Moreover, this approach increases
accuracy and recall. It also reduces the detection
of false-positive and false-negative. Object detection
techniques using bounding box detection for detect-
ing fruits increases complexity in occluded, and clus-
tered conditions (Afonso et al., 2020). Another ap-
proach uses thermal images for detecting fruits us-
ing thermal cameras (Stajnko et al., 2004) which are
costly as compared to RGB or depth cameras. Har-
vesting fruits after detection and classification is a sig-
nificant issue without mapping the environment. Us-
ing the environment map, we can effectively plan the
path of the robotic manipulator even when the agri-
cultural environment is stochastic. It helps to identify
hidden rotten/ripe fruits in harsh environments.
This paper proposes an efficient perception
pipeline for tomatoes harvesting. To evaluate our per-
ception pipeline, we created a simulated environment
with tomato plants and tested P
2
Ag. The major con-
tribution of this paper is as follows:
• Implementation of instance segmentation of
tomatoes with effective sensing
• Classification of rotten and ripe tomatoes
• Semantic mapping for efficient navigation
This paper focuses on the perception pipeline with
optimized computational processing power and en-
hanced efficiency. The proposed pipeline is best
suited for embedded applications with limited com-
putational power and limited sensors.
The rest of the paper is structured as follows. Sec-
tion 2 reviews the existing and related work on per-
ception techniques in agriculture domain. Section 3
presents the proposed perception pipeline (P
2
Ag). Fi-
nally, Section 4 provides the conclusion and outlook
of this work in brief.
2 RELATED WORK
Perception techniques in the agricultural domain are
an important area for research that eliminate errors in
manual vision techniques. Previous research in this
domain (Arakeri and Lakshmana, 2016) has shown
better results than human vision precision. These
computer vision techniques have been used for de-
tecting and classifying different fruits (Unay et al.,
2011; Al-Ohali, 2011; Nandi et al., 2013; Blasco
et al., 2007). There is a positive correlation between
ripening and rotting of tomatoes with the physical ap-
pearance of the tomatoes, such as colour, size (Bal-
tazar et al., 2008). Research has also been done on
detecting defects originating from different causes,
where each defect is classified according to its ap-
pearance (Riquelme et al., 2008). For segmenting the
fruit, instance segmentation algorithms are used. The
state-of-the-art algorithm Mask R-CNN (He et al.,
2018) segments each object with high precision, but
the computation cost is too high for AMARs. Other
instance segmentation implementations (Sun et al.,
2021; Wu et al., 2019; Takikawa et al., 2019; Cheng
et al., 2020) are more efficient or precise but do not si-
multaneously have these qualities. YOLACT (Bolya
et al., 2019) is 394% more efficient than Mask R-
CNN but 26% less accurate. Here the accuracy dif-
ference was lower compared to inference time and
FPS, making YOLACT a better algorithm for our use
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
122

Figure 2: The flow of the system; showing segmentation of left and left-bottom side of pipeline classification, extraction of
data in centre blocks, and finally, the depth and effective grasping of fruit on the right side.
case. Classifying these segmented objects within the
multi-class has many implementations (Unay et al.,
2011; Gehler and Nowozin, 2009; Cires¸an et al.,
2011; Zhang and Smart, 2004), but our application
requires the most efficient algorithm without compro-
mising accuracy.
The main challenge in any perception pipeline
for an agricultural environment is to find an opti-
mized and appropriate path for the robotic manipu-
lator to harvest the crop. Many implementations use
mapping techniques for observing plant characteris-
tics (Xia et al., 2015; Lu et al., 2020; Sodhi et al.,
2017). These methods usually use 3D cameras or a
collection of 2D cameras with precise transformation.
These methods are used for plant monitoring (Xia
et al., 2015) using RGBD cameras, visualizing the
health and other parameters of the plant. These meth-
ods increase the computation processing cost, which
makes the whole approach inefficient. Reconstruc-
tion of a plant using structure from motion (SFM)
(Lu et al., 2020) is another approach for mapping the
plant. In this approach, multiple images are taken
from different perspectives, which creates a 3D map
of the plant after post-processing. This method re-
quires post-processing not suitable for AMARs. An-
other implementation (Santos et al., 2015) uses 3D
imaging systems, which are costly. 3D mapping of
the whole plant using a single handheld camera leads
to an efficient mapping of the plant, but these methods
take much time and do not concentrate on essential
plant factors. These methods do not focus on finding
the best path for the robotic manipulator, excluding
the occlusions. Other approaches include multi-view
monitoring, which is impossible using AMAR as our
robot cannot depict a multi-view system.
This research focuses on efficient techniques for
segmenting each fruit, classifying and mapping the
plant using segmented fruit areas. P
2
Ag reduces the
complexity along with increasing the precision and
accuracy. P
2
Ag focuses on practical strategies for se-
mantically mapping the plant and predicting the best
path, avoiding occlusions.
3 PERCEPTION PIPELINE
The perception for harvesting tomatoes in an agri-
cultural platform requires a human-like approach to-
wards nature, as the human species has mastered
the art from time immemorial. Implementing these
P2Ag: Perception Pipeline in Agriculture for Robotic Harvesting of Tomatoes
123
diverse AMAR systems, a pipeline with perception
computation and manipulative motions of the robotic
arm is required, fulfilling the need for low computa-
tion and compelling predictions at the same time.
3.1 Proposed System
The perception pipeline can segment the tomato from
a group in the given image. To explain and evalu-
ate our proposed pipeline, we simulated tomato plants
and tested them on natural tomato plants. The goal
of the perception pipeline is to classify the tomato
from the given image and locate them in 3D space
for grasping. Figure 2 shows the flow of the system.
In the first step of the P
2
Ag, a captured image
from the camera sensor is given to the trained model
for segmentation of the tomato as explained in sec-
tion 3.2. The segmentation of the tomato is then ex-
tracted from the image and passed onto the classi-
fication model to predict the class of tomato. The
information about each tomato is extracted, such as
area, centroid and bounding box coordinates for fur-
ther processing such as coordinate transformation ex-
plained further in section 3.4.3. After that, the depth
to the segmentation centre is extracted from the plat-
form. The pipeline continues where a Machine Learn-
ing (ML) model predicts the tomato to be harvested
based on depth, bounding box size and segmentation
area. This method of ML prediction makes its deci-
sion close to human behaviour. The higher predicted
tomato after mapping of a plant is selected for grasp-
ing. The grasping coordinate is calculated by trans-
forming the tomato to the base of AMAR and know-
ing the depth of the tomato, which is further explained
in section 3.4.4 and then the process continues.
The flow of the system is depicted as a set of im-
ages in Figure 5, where the first row is the original
image, the second row shows the image after the in-
stance segmentation (Hafiz and Bhat, 2020) process,
i.e. after YOLACT (Bolya et al., 2019) process the
instance segmentation over the image, also the text
overlay depicting the classification of tomatoes at the
same time showing segmentation and bounding box
centre of each tomato respectively, finally the third
row shows the depth image and predictive analysis
of the best tomato which can be picked using ML
model with its predicted value and 3D coordinates
(x, y, depth) concerning the camera frame. The pro-
cess is repeated over the end-points and centre of a
quarter-spherical map of a plant with respect to the
centroid of the plant, which is shown by a set of im-
ages as (a), (b), (c), and (d) column as the left-most,
centre, right-most, and top-most points respectively.
The same coordinate of the final depth analysis im-
age (Figure 5(d)) and the predicted value is passed for
final picking manoeuvres.
3.2 Image Segmentation
Image Segmentation is the process by which a digital
image is partitioned into subgroups (of pixels) called
image objects, which can reduce the complexity of
the image, and thus analyzing the image becomes a
straightforward process. Since an image is a collec-
tion of different pixels, pixels with similar attributes
are grouped using image segmentation. Image seg-
mentation creates a pixel-wise mask for each object
in the image. To differentiate objects of the same
class, i.e.tomatoes, we used the instance segmentation
method to segment a pixel into its parent class.
Results on a single Titan XP based on COCO
dataset: Accurate Prediction (AP) shows that even
though there is a bit drop in accuracy, YOLACT gives
3-4X Frames Per Second (FPS) than the Mask R-
CNN (He et al., 2018) model. Even though Mask R-
CNN has a classification score higher than YOLACT
at the same time, the mask quality (Intersection of
Union (IoU) b/w instance mask and ground truth)
is low while comparing both. The AMAR system
should focus on low computation methods, and here
the YOLACT manifests its segmentation process pos-
itively. The comparison of the same is shown in Fig-
ure 3 where Figure 3 (a) is the actual test image, Fig-
ure 3 (b) is the YOLACT model processed image and
Figure 3 (c) is the Mask R-CNN processed image.
Table 1: Mask Performance of YOLACT and Mask R-
CNN (state-of-the-art method) for mask mAP and speed on
COCO test-dev.
Model Name Backbone Time FPS mAP
Mask R-CNN ResNet101-FPN 116.3 8.6 35.7
YOLACT ResNet101-FPN 30.3 33.0 29.8
YOLACT ResNet50-FPN 23.5 42.5 28.2
*on Titan Xp (GPU Geekbench link).
Table 2: Mask Performance of YOLACT for different em-
bedded platform on custom tomatoes dataset.
Embedded Device Backbone FPS
Nvidia Jetson TX2 ResNet50-FPN 2.3
Nvidia Xavier AGX ResNet50-FPN 8.4
Nvidia GeForce GTX 1660Ti (mobile) ResNet50-FPN 22
Nvidia GeForce GTX 1660Ti (mobile) ResNet101-FPN 16
3.2.1 Instance Segmentation
Instance segmentation classifies every object sepa-
rately, even if they belong to the same class of ob-
jects. Different backbones for YOLACT have been
tested, which worked as the base architecture of
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
124

Figure 3: (a) Actual Image, (b) YOLACT segmentation, and (c) Mask R-CNN segmentation.
P
2
Ag. The backbone comparison, as shown in Ta-
ble 1, states that although the mean Accurate Pre-
diction (mAP) increases with more complex Residual
networks, at the same time, there is a decrease in FPS
values and increase in inference time. There is a de-
crease in inference time of computation by 283% for
YOLACT (ResNet101-FPN) while comparing with
Mask R-CNN having a backbone of ResNet101-FPN
(He et al., 2016), which resulted in an increase of
FPS in YOLACT by 283% while sacrificing the mAP
value reduction by 20% for the same. The comparison
of ResNet101-FPN and ResNet50-FPN for YOLACT
shows a minor decrease in mAP values by 5% for
ResNet-50-FPN while making the computation faster
by a significant increase of FPS by 28% and decrease
in inference time by 29% as shown in Table 1. Com-
parison of performance of YOLACT is shown in Ta-
ble 2. YOLACT is very feasible for Jetson TX2 with-
out compromising accuracy, being very low-end hard-
ware for AMAR. 2.3 FPS, which is obtained from
Nvidia Jetson TX2, is feasible for this perception
pipeline. A significant decrease in FPS for ResNet-
Figure 4: Left-(actual image) right-(after classification) us-
ing LR ML model.
50-FPN can be observed compared with other back-
bones; therefore, ResNet50-FPN has been used to im-
plement YOLACT, as computation factors also come
into the role of implementation AMAR systems. The
complexity of the models also has to be taken into
account with FPS and mean accuracy. In contrast,
the training period for later diverse sets of tomatoes
has been reduced since the ResNet50-FPN backbone
is trained via transfer learning methods (Torrey and
Shavlik, 2009).
3.3 Tomato Classification
The classification of tomatoes is the deciding factor
for reaching out for the fruits, as the basic segregation
process. We compared three methods for classifying
tomatoes as ripe or unripe and rotten. The basic ML
models we used are: Logistic regression (LR) (Hru-
aia et al., 2017), Support Vector Machine (SVM) (Sun
et al., 2015) and k-Nearest Neighbour (kNN) (Amato
and Falchi, 2010). Comparison studies (Abd Rahman
et al., 2015) state that LR is more stable in its pre-
diction for binary classification, having less inference
time for the classification process. The actual classi-
fication image result can be seen in Figure 4 left and
right image, respectively. The model has been trained
on datasets created by segmentation results from the
3.2.1, after reducing the size of the image and giving
the image as input parameters to the model and label
of images as the output. The LR generates a model
with a file size of 100 KiloBytes or less, proving its
capability to implement an efficient data process in
the AMAR proposed pipeline system.
3.4 Effective Tomatoes Localization
The AMAR aims to harvest the tomato, which should
be within its radius of reach, but at the same time, it
should be in the class which needs to be harvested out
from the respective plant after the manoeuvre. The
method requires a practical solution that may result in
several iterations and interactions to actual physics of
the nature for every step improvement; the same can
be achieved using Gazebo. The system, therefore, has
been simulated and tested with ROS (Quigley et al.,
2009) inside Gazebo. For these iterations and testing
of our pipeline, we have used a simulated environ-
P2Ag: Perception Pipeline in Agriculture for Robotic Harvesting of Tomatoes
125
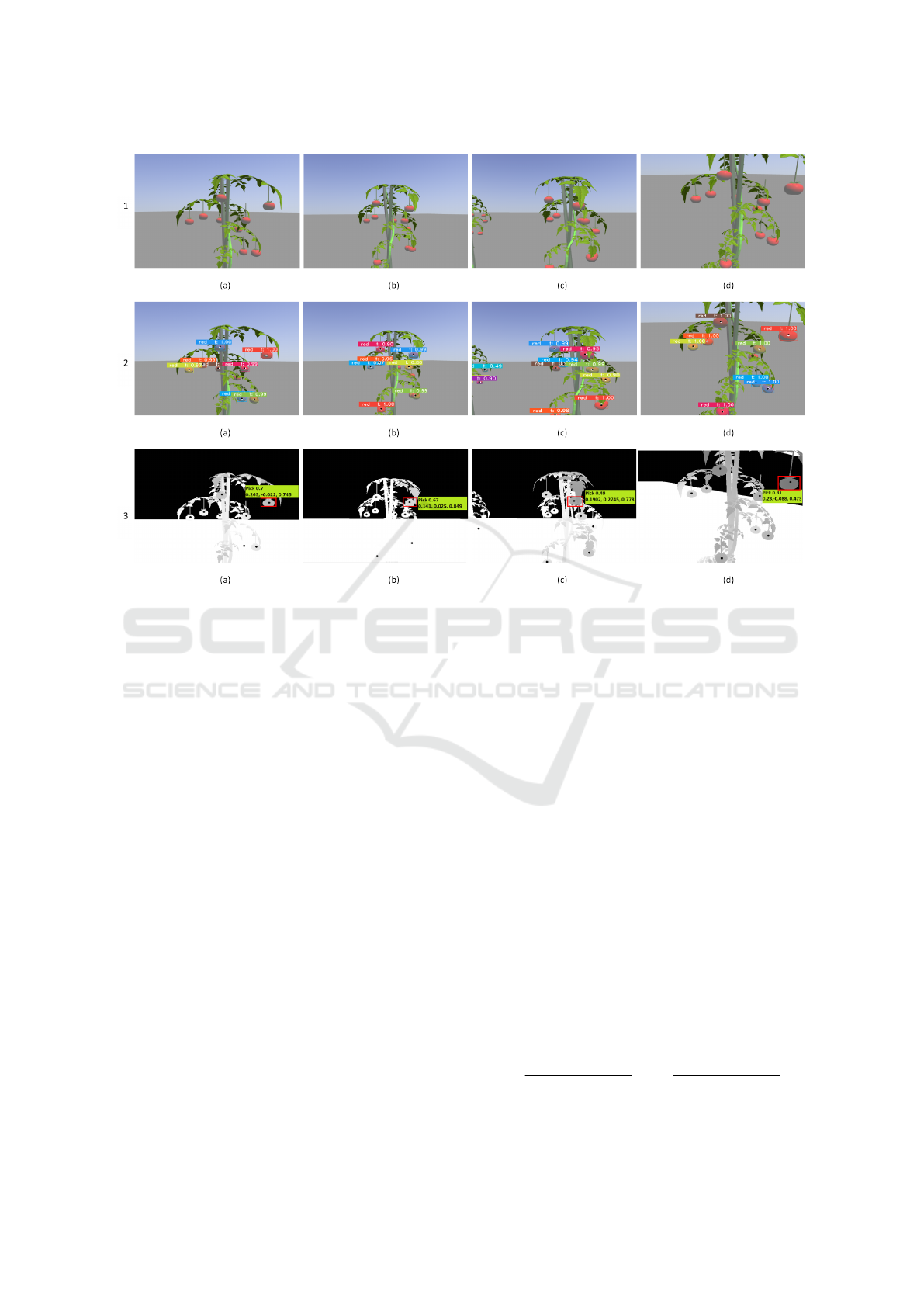
Figure 5: Semantic mapping and processing, (a) left, (b) centre, (c) right and (d) top view of plant; (1) original image, (2)
Segmented image and processed image with classification, and (3) depth image with 3D coordinate and ML prediction.
ment using the Noetic version of ROS. As the pro-
cess of implementation and coordination remains the
same, i.e. the ROS system coordinates the actuation
of hardware in response to perception; therefore, sim-
ulation of the same will not produce a high difference
in practical implementations.
3.4.1 Generating Area and Centroid
The area of the segmented portion too adds an es-
sential parameter for a decision to pick the tomato,
even as the human judgment would make it primary.
The method uses basic mathematical calculation for
ease of computation. Therefore, the segmented por-
tion of each tomato from the YOLACT is extracted
by mapping the segmented portion over a null val-
ued pixel image. After that, the mask is extracted
with a threshold of the maximum pixel value for ex-
tracting a blob. The blob generation develops a more
smooth way of processing the extraction of contours
(Antunes and Lopes, 2013) and ensures the (Xu and
Li, 2008; Davis and Raianu, 2007) uniform calcu-
lation of moments for each pixel. The contours are
generated for which the blob can be utilized for com-
puting the foreground area of tomato which is cal-
culated by using moments of pixel which is given
by m
ji
=
∑
xy
(array(x,y).x
j
.y
i
). Where m
00
repre-
sents the area, x
j
and y
i
represents pixel values. This
method proves to be an effective, fast (Yang and Al-
bregtsen, 1995) and low computation process for the
AMAR systems. The moment on the x-axis is given
by m
10
and similarly for y-axis by m
01
. The centre of
contour in x-axis is obtained by the ratio of moments
in x-axis by area (or moment of the blob), x = m
10
/
m
00
similarly for y-axis it is obtained by y = m
01
/m
00
.
These x and y coordinates signify the segmentation
centre.
3.4.2 Depth Information Extraction
The 3D coordinate of a point, i.e. segmentation centre
of the tomato, is given by x, y, and z, extracted using
a depth image from the depth camera embedded in
the AMAR. The depth image is represented by [x, y,
depth]. By knowing the x and y from the segmentation
centre, we can retrieve the depth of that point using
depth image. Since the values, x and y coordinate of
the point and depth are present, we can calculate the
3D coordinate of that point on tomato in space with
respect to the AMARs camera.
x
w
=
depth ∗ (x
p
− C
x
)
f
x
,y
w
=
depth ∗ (y
p
− C
y
)
f
y
z
w
= depth
(1)
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
126

Equation 1 calculates x
w
, y
w
and z
w
, which are the 3D
coordinate of segmentation centre of the tomato with
respect to AMARs camera, where x
p
and y
p
is the x
and y pixel coordinate of that point, C
x
and C
y
is the
centre pixel and f
x
and f
y
resembles the focal length
in x and y axes of a camera respectively.
3.4.3 Semantic Mapping
The mapping of the plant is the next major part of the
decision as it contributes to the harvest of the tomato
from the most suitable position and judges other pa-
rameters of the tomato at the same time while also
making the processes in a low computational man-
ner. The semantic mapping of a plant requires ma-
noeuvring of AMAR; for efficient and straightforward
mapping of the plant, we implemented the quarter-
spherical movement around the plant, which resem-
bles the basic human behaviour for plant mapping.
After the depth information extraction, the end-
points of the bounding box in the x-axis with re-
spect to the y-axis from the segmented centroid is
converted (or transformed) to a 3D space coordinate.
The generated coordinate represent the inertial frame
of reference from the camera to the point of grasping
tomato, which is meaningless until the coordinate sys-
tem is transformed to the base of AMAR. Therefore
the affine transformation (
ˇ
Svec and Farkas, 2014) of
the relative frames are done by using rotational matrix
and translation vector calculations.
To compute the grasping manoeuvre of tomato,
AMAR needs to map the tomato plant. To do so, the
arm of the AMAR should move in a quarter-spherical
motion around the plant’s centroid of its 3D struc-
ture. The robotic manipulator is made to compute in
pre-defined positions to achieve the quarter-spherical
structure, mapping the plant effectively. From the
quarter-spherical motion, the four computation points
for the pipeline are the leftmost, rightmost, centre
(facing perpendicularly to plant), and topmost points.
These points make the processing easy and low com-
putation by iterating only four times, instead of con-
tinuous iteration of the perception pipeline for the
whole manoeuvre period, resulting in a similar out-
come for prediction but with an increase in computa-
tion. Figure 5 shows the order of the set of images as
first and third row as original and depth process with
(a), (b), (c) and (d) columns as left, centre, right, and
top end-point respectively as explained in section 3.1.
This method will help extract an influential picking
position for a tomato, i.e. by executing this manoeu-
vre mentioned above, human exertions for finding the
best position to pick the tomato can be achieved.
The process of pipeline inter-process like segmen-
tation, depth extraction, and details like area and cen-
troid will be stored for the following computation at
every four-point of the quarter-spherical motion. The
computation of such a simple and efficient method
also fills the low-computation need of processing in
AMAR. The parameters followed by mapping the
plant for the tomatoes are depth, width on the x-axis
by the base of AMAR’s frame of reference trans-
formed and segmentation area. The judgment for the
harvesting of selective tomatoes should result from
parameter analysis of information extracted from the
mapping of each tomato.
3.4.4 Identification of Efficient Pose
The model should be a state-of-the-art method that
accomplishes the need for faster and low computa-
tion AMAR systems. The LR ML model trained on
the parameters resulted in an accuracy of 99% for
the tomato to be grasped. The probabilities and also
the choice of model is from the study of comparison
with SVM, kNN proving its stable algorithm and its
low computation capability, similarly as explained in
section 3.3. The trained model, when executed with
the parameters, as shown in Figure 5 the third row,
by mapping the content onto the depth image, dis-
plays the probability factor of the tomato, which can
be picked with its respective 3D coordinate (Muss-
abayev et al., 2018) in AMAR base’s frame of refer-
ence at each end-point. The left end-point depth im-
age is Figure 5 (a) column, and similarly, all the other
end-points as labelled are depicted in Figure 5’s (b),
(c) and (d) columns. The highest probability of ’pick’
class is labelled next to the tomato by the program
with its 3D coordinate from the frame of reference of
AMAR’s camera, in the format returned by the calcu-
lation done using 3D extraction of tomato.
The best tomato to pick is determined by tak-
ing the highest probability from the picked class as
predicted by the ML algorithm. The 3D coordi-
nate of that tomato is transformed with respect to the
AMAR’s base. Then the robotic manipulator plans its
path to the 3D pose. The grasping position of the grip-
per from the calculated surface 3D coordinate is cal-
culated by making the robotic manipulator move to-
wards the tomato by (y or x value)∗ f actor +(w
f
/2)
where w
f
is the width of tomato, which is calcu-
lated by transforming the edges of bounding box in x-
axis having y-axis as segmentation centre line, where
’y’ is the position of the coordinate point pointing
towards the tomato and the factor is generated by
the difference in angle of orientation of AMAR and
the tomato. The factor for the x-axis can be shown
by f actor
x
= sin(angle) while factors of y-axis by
f actor
y
= cos(angle) due to difference in tomato and
AMAR orientation, where z is valued as the axis nor-
P2Ag: Perception Pipeline in Agriculture for Robotic Harvesting of Tomatoes
127

mal to the ground (base), after the tomato is picked up
successfully the process iterates and goes on, where
it also avoids picking if no tomato is found in the
’pick’ class.
4 CONCLUSION
We have introduced a new, highly optimized percep-
tion pipeline whch can be used for harvesting fruits in
agricultural environments. All perception techniques,
that comprise most computations for robotic harvest-
ing, including instance segmentation of fruit, seman-
tic mapping and image classification, are realized for
onboard computation, that is the requirement for au-
tonomy and eliminating server dependencies.
We demonstrated a balance of efficient and precise
instance segmentation algorithms. YOLACT pro-
vided an mAP of 28.2, indicating that precision was
high and can be increased using a more computational
heavy backbone for these algorithms. Image classi-
fication using LR resulted in a more efficient clas-
sification algorithm for this pipeline for classifying
fruit with different parameters such as rotten, ripe and
many more. We also demonstrated the outcome of se-
mantic mapping, which runs efficiently and performs
better than directly picking the fruit.
In future work, we will optimize these algorithms
and implement them for diverse categories of fruits
and vegetables. In addition, we will also implement
this pipeline in a more dynamic and cluttered envi-
ronment using a small-sized quadcopter with a single
camera that can enable more efficiency.
ACKNOWLEDGEMENTS
This work was supported in part by Ministry of Ed-
ucation (MoE), Govt. of India in the project e-
Yantra (RD/0113-MHRD001-021). We acknowledge
the support of e-Yantra staff especially Rathin Biswas
for reviewing the paper.
REFERENCES
Abd Rahman, H. A., He, H., and Bulgiba, A. (2015). Com-
parisons of adaboost, knn, svm and logistic regression
in classification of imbalanced dataset. pages 54–64.
Afonso, M., Fonteijn, H., Fiorentin, F. S., Lensink, D.,
Mooij, M., Faber, N., Polder, G., and Wehrens, R.
(2020). Tomato fruit detection and counting in green-
houses using deep learning. Frontiers in Plant Sci-
ence, 11:1759.
Al-Ohali, Y. (2011). Computer vision based date fruit grad-
ing system: Design and implementation. Journal of
King Saud University - Computer and Information
Sciences, 23.
Amato, G. and Falchi, F. (2010). Knn based image classifi-
cation relying on local feature similarity. pages 101–
108.
Antunes, M. and Lopes, L. S. (2013). Contour-based object
extraction and clutter removal for semantic vision. In
Kamel, M. and Campilho, A., editors, Image Analysis
and Recognition, pages 170–180, Berlin, Heidelberg.
Springer Berlin Heidelberg.
Arakeri, M. and Lakshmana (2016). Computer vision based
fruit grading system for quality evaluation of tomato
in agriculture industry. Procedia Computer Science,
79:426–433.
Bakar Siddik, M. A., Deb, M., Pinki, P. D., Kanti dhar, M.,
and Faruk, M. O. (2018). Modern agricultural farm-
ing based on robotics and server-synced automation
system. In 2018 International Conference on Recent
Innovations in Electrical, Electronics Communication
Engineering (ICRIEECE), pages 323–326.
Baltazar, A., Aranda, J. I., and Gonz
´
alez-Aguilar, G.
(2008). Bayesian classification of ripening stages of
tomato fruit using acoustic impact and colorimeter
sensor data. Computers and Electronics in Agricul-
ture, 60(2):113–121.
Blasco, J., Aleixos, N., and Molt
´
o, E. (2007). Computer
vision detection of peel defects in citrus by means of
a region oriented segmentation algorithm. Journal of
Food Engineering, 81(3):535–543.
Bolya, D., Zhou, C., Xiao, F., and Lee, Y. J. (2019). Yolact:
Real-time instance segmentation.
Cheng, B., Collins, M. D., Zhu, Y., Liu, T., Huang, T. S.,
Adam, H., and Chen, L.-C. (2020). Panoptic-deeplab:
A simple, strong, and fast baseline for bottom-up
panoptic segmentation.
Cires¸an, D. C., Meier, U., Masci, J., Gambardella, L. M.,
and Schmidhuber, J. (2011). High-performance neural
networks for visual object classification.
Davis, P. and Raianu, S. (2007). Computing areas using
green’s theorem and a software planimeter. Teaching
Mathematics and Its Applications, 26:103–108.
Deshingkar, P. (2003). Seasonal migration for livelihoods
in india: Coping, accumulation and exclusion.
Dokic, K., Blaskovic, L., and Mandusic, D. (2020). From
machine learning to deep learning in agriculture – the
quantitative review of trends. IOP Conference Series:
Earth and Environmental Science, 614:012138.
Gehler, P. and Nowozin, S. (2009). On feature combination
for multiclass object classification. In 2009 IEEE 12th
International Conference on Computer Vision, pages
221–228.
Hafiz, A. M. and Bhat, G. M. (2020). A survey on instance
segmentation: state of the art. International Journal
of Multimedia Information Retrieval, 9:171 – 189.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2018).
Mask r-cnn.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. 2016 IEEE Con-
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
128

ference on Computer Vision and Pattern Recognition
(CVPR), pages 770–778.
Hruaia, V., Kirani, Y., and Singh, N. (2017). Binary face
image recognition using logistic regression and neural
network. pages 3883–3888.
ICRISAT (2020). International crop research institute
for the semi-arid tropics , labor scarcity and rising
wages in indian agriculture. https://www.icrisat.org/
labor-scarcity-and-rising-wages-in-indian-agriculture/.
Ku, L. (2019). How automation is trans-
forming the farming industry. https:
//www.plugandplaytechcenter.com/resources/
how-automation-transforming-farming-industry/.
Lakhiar, I., Jianmin, G., Syed, T., Chandio, F. A., Buttar, N.,
and Qureshi, W. (2018). Monitoring and control sys-
tems in agriculture using intelligent sensor techniques:
A review of the aeroponic system. Journal of Sensors,
2018:18.
Lu, X., Ono, E., lu, S., Zhang, Y., Teng, P., Aono, M.,
Shimizu, Y., Hosoi, F., and Omasa, K. (2020). Re-
construction method and optimum range of camera-
shooting angle for 3d plant modeling using a multi-
camera photography system. Plant Methods, 16.
Ma, C., Xu, S., Yi, X., Li, L., and Yu, C. (2020). Re-
search on image classification method based on dcnn.
In 2020, ICCEA, pages 873–876.
Mussabayev, R., Kalimoldayev, M., Amirgaliyev, Y.,
Tairova, A., and Mussabayev, T. (2018). Calculation
of 3d coordinates of a point on the basis of a stereo-
scopic system. Open Engineering, 8(1):109–117.
Nandi, C., Tudu, B., and Koley, C. (2013). Machine vision
based techniques for automatic mango fruit sorting
and grading based on maturity level and size. Sens-
ing Technology: Current Status and Future Trends II,
8:27–46.
Payne, A., Walsh, K., Subedi, P., and Jarvis, D. (2014). Es-
timating mango crop yield using image analysis us-
ing fruit at ‘stone hardening’ stage and night time
imaging. Computers and Electronics in Agriculture,
100:160–167.
Prabakar, C., Devi, K., and Selvam, S. (2011). Labour
scarcity
ˆ
aC“ its immensity and impact on agriculture.
Agricultural Economics Research Review.
Quigley, M., Conley, K., Gerkey, B., Faust, J., Foote, T.,
Leibs, J., Wheeler, R., and Ng, A. (2009). Ros: an
open-source robot operating system. volume 3.
Riquelme, M., Barreiro, P., Ruiz-Altisent, M., and Valero,
C. (2008). Olive classification according to external
damage using image analysis. Journal of Food Engi-
neering, 87:371–379.
Santos, T. T., Koenigkan, L. V., Barbedo, J. G. A., and Ro-
drigues, G. C. (2015). 3d plant modeling: Localiza-
tion, mapping and segmentation for plant phenotyping
using a single hand-held camera. In Agapito, L., Bron-
stein, M. M., and Rother, C., editors, Computer Vi-
sion - ECCV 2014 Workshops, pages 247–263, Cham.
Springer International Publishing.
Sodhi, P., Vijayarangan, S., and Wettergreen, D. (2017).
In-field segmentation and identification of plant struc-
tures using 3d imaging. In 2017 IEEE/RSJ (IROS),
pages 5180–5187.
Stajnko, D., Lakota, M., and Ho
ˇ
cevar, M. (2004). Estima-
tion of number and diameter of apple fruits in an or-
chard during the growing season by thermal imaging.
Computers and Electronics in Agriculture, 42(1):31–
42.
Sun, X., Liu, L., Wang, H., Song, W., and Lu, J. (2015).
Image classification via support vector machine. In
2015 4th ICCSNT, volume 01, pages 485–489.
Sun, Y., Gao, W., Pan, S., Zhao, T., and Peng, Y. (2021).
An efficient module for instance segmentation based
on multi-level features and attention mechanisms. Ap-
plied Sciences, 11(3).
Takikawa, T., Acuna, D., Jampani, V., and Fidler, S. (2019).
Gated-scnn: Gated shape cnns for semantic segmen-
tation.
Tian, H., Wang, T., Liu, Y., Qiao, X., and Li, Y. (2019).
Computer vision technology in agricultural automa-
tion ——a review. Information Processing in Agri-
culture, 7.
TOMBE, R. (2020). Computer vision for smart farming
and sustainable agriculture. In 2020 IST-Africa Con-
ference (IST-Africa), pages 1–8.
Torrey, L. and Shavlik, J. (2009). Transfer learning. Hand-
book of Research on Machine Learning Applications.
Unay, D., Gosselin, B., Kleynen, O., Leemans, V., Destain,
M.-F., and Debeir, O. (2011). Automatic grading
of bi-colored apples by multispectral machine vision.
Computers and Electronics in Agriculture - COMPUT
ELECTRON AGRIC, 75:204–212.
ˇ
Svec, M. and Farkas, I. (2014). Calculation of object posi-
tion in various reference frames with a robotic simu-
lator.
Wu, H., Zhang, J., Huang, K., Liang, K., and Yu, Y. (2019).
Fastfcn: Rethinking dilated convolution in the back-
bone for semantic segmentation.
Xia, C., Wang, L., Chung, B.-K., and Lee, J.-M. (2015). In
situ 3d segmentation of individual plant leaves using
a rgb-d camera for agricultural automation. Sensors,
15(8):20463–20479.
Xu, D. and Li, H. (2008). Geometric moment invariants.
Pattern Recognit., 41:240–249.
Yang, L. and Albregtsen, F. (1995). Fast and exact compu-
tation of moments using discrete green’s theorem.
Zamora-Izquierdo, M., Santa, J., Martinez, J., Mart
´
ınez, V.,
and Skarmeta, A. (2019). Smart farming iot platform
based on edge and cloud computing. Biosystems En-
gineering, 2019:4–17.
Zhang, M. and Smart, W. (2004). Multiclass object classi-
fication using genetic programming. In Raidl, G. R.,
Cagnoni, S., Branke, J., Corne, D. W., Drechsler, R.,
Jin, Y., Johnson, C. G., Machado, P., Marchiori, E.,
Rothlauf, F., Smith, G. D., and Squillero, G., editors,
Applications of Evolutionary Computing, pages 369–
378, Berlin, Heidelberg. Springer Berlin Heidelberg.
Zhao, Z.-Q., Zheng, P., Xu, S.-T., and Wu, X. (2019). Ob-
ject detection with deep learning: A review. IEEE
Transactions on Neural Networks and Learning Sys-
tems, 30(11):3212–3232.
P2Ag: Perception Pipeline in Agriculture for Robotic Harvesting of Tomatoes
129
