
A k-Means Algorithm for Clustering with Soft Must-link and
Cannot-link Constraints
Philipp Baumann
1 a
and Dorit S. Hochbaum
2 b
1
Department of Business Administration, University of Bern, Schuetzenmattstrasse 14, 3012 Bern, Switzerland
2
IEOR Department, University of California, Berkeley, Etcheverry Hall, CA 94720, U.S.A.
Keywords:
Constrained Clustering, Must-link and Cannot-link Constraints, Mixed-binary Linear Programming.
Abstract:
The k-means algorithm is one of the most widely-used algorithms in clustering. It is known to be effective
when the clusters are homogeneous and well separated in the feature space. When this is not the case, incor-
porating pairwise must-link and cannot-link constraints can improve the quality of the resulting clusters. Var-
ious extensions of the k-means algorithm have been proposed that incorporate the must-link and cannot-link
constraints using heuristics. We introduce a different approach that uses a new mixed-integer programming
formulation. In our approach, the pairwise constraints are incorporated as soft-constraints that can be violated
subject to a penalty. In a computational study based on 25 data sets, we compare the proposed algorithm to a
state-of-the-art algorithm that was previously shown to dominate the other algorithms in this area. The results
demonstrate that the proposed algorithm provides better clusterings and requires considerably less running
time than the state-of-the-art algorithm. Moreover, we found that the ability to vary the penalty is beneficial in
situations where the pairwise constraints are noisy due to corrupt ground truth.
1 INTRODUCTION
In many practical clustering applications, users have
some side information about the clustering solution.
For example, users might know the labels of a small
set of objects. Using this side information to guide
the clustering algorithms can greatly improve clus-
tering quality, especially when clusters have irregu-
lar shapes and are not well separated in the feature
space. A common approach to incorporate side infor-
mation is to specify must-link (ML) and cannot-link
(CL) constraints for pairs of objects. An ML con-
straint states that two objects belong to the same clus-
ter while a CL constraint states that two objects be-
long to different clusters. Successful applications of
clustering with ML and CL constraints include lane
finding in GPS data (Wagstaff et al., 2001), text cat-
egorization (Basu et al., 2004), image and video seg-
mentation (Wu et al., 2013), and clustering of time
series (Lampert et al., 2018).
We consider here a constrained clustering problem
where a set of objects must be assigned to a predefined
number of clusters. The ML and CL constraints can
a
https://orcid.org/0000-0002-3286-4474
b
https://orcid.org/0000-0002-2498-0512
be used as guidance rather than hard requirements,
i.e., not all ML and CL constraints must be enforced.
Various algorithms have been developed for clus-
tering with ML and CL constraints. Many of
them are adaptations of traditional clustering algo-
rithms. Adaptations of the k-means algorithm include
the constrained k-means algorithm (COP-kmeans) of
(Wagstaff et al., 2001), the pairwise constrained clus-
tering algorithm (PCK-means) of (Basu et al., 2004),
the constrained vector quantization error algorithm
(CVQE) of (Davidson and Ravi, 2005), the linear
version of the CVQE algorithm (LCVQE) proposed
by (Pelleg and Baras, 2007), and the lagrangian con-
strained clustering algorithm (LCC) of (Ganji et al.,
2016). (Gonz
´
alez-Almagro et al., 2020) recently con-
ducted a comprehensive computational comparison of
seven algorithms that included the COP-kmeans and
the LCVQE algorithms. It turned out that the dual
iterative local search algorithm (DILS) of (Gonz
´
alez-
Almagro et al., 2020) is the currently leading algo-
rithm in terms of clustering quality. A shared charac-
teristic of established algorithms for clustering with
ML and CL constraints is that they all use heuristics
to incorporate the ML and CL constraints.
We propose here an alternative approach to incor-
porate ML and CL constraints that is based on mixed-
Baumann, P. and Hochbaum, D.
A k-Means Algorithm for Clustering with Soft Must-link and Cannot-link Constraints.
DOI: 10.5220/0010800000003122
In Proceedings of the 11th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2022), pages 195-202
ISBN: 978-989-758-549-4; ISSN: 2184-4313
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
195

integer programming. Our algorithm, which we refer
to as BH-kmeans, is an adaptation of the k-means al-
gorithm that assigns, in each iteration, all objects to
clusters by solving a mixed-binary linear optimization
program. The ML and CL constraints are included in
the program as soft constraints. In contrast to most
other algorithms that treat the ML and CL constraints
as soft constraints, our algorithm provides a parame-
ter to control the penalty that is incurred for violating
a constraint. This allows to adjust the algorithm to
different levels of noise in the constraint set.
In a computational analysis based on 100 problem
instances from the literature, we compare our BH-
kmeans algorithm to the DILS algorithm (Gonz
´
alez-
Almagro et al., 2020). Our results indicate that the
BH-kmeans algorithm clearly outperforms the DILS
algorithm in clustering quality and running time.
Furthermore, we analyze, based on constraint sets
that differ with respect to the amount of noise, how
changes of the penalty parameter affect the perfor-
mance and the running time of the BH-kmeans al-
gorithm. To the best of our knowledge, this is the
first paper that systematically investigates this rela-
tionship.
The paper is structured as follows. In Section 2,
we define the constrained clustering problem that we
consider here. In Section 3, we describe the BH-
kmeans algorithm. In Section 4, we compare the BH-
kmeans algorithm to the DILS algorithm using prob-
lem instances from the literature. In Section 5, we
analyze the impact of the penalty of soft constraints
on the clustering quality and the running time of the
BH-kmeans algorithm. Finally, in Section 6, we pro-
vide conclusions and directions for future research.
2 CONSTRAINED CLUSTERING
PROBLEM
Given is a data set with n objects, represented by vec-
tors v
1
, . . . , v
n
∈ R
d
of d numeric features. The goal is
to assign a label l
i
∈ {1, . . . , k} to each object such that
the data set is partitioned into k clusters. The ML and
the CL constraints are defined for pairs of objects. An
ML constraint suggests that two objects i and i
0
have
the same label. A CL constraint suggests that two ob-
jects i and i
0
have different labels. The ML and CL
constraints can be used for guidance but they are not
hard requirements that need to be satisfied.
The clustering quality can be assessed with inter-
nal or external evaluation measures. Internal evalua-
tion measures are computed based on the same data
that was used for clustering. These measures assume
that objects in the same cluster are more similar than
objects in different clusters according to some similar-
ity measure. External evaluation measures are com-
puted based on external data (e.g., a ground truth as-
signment) that was not used for clustering. In Sec-
tion 4.3, we describe the measures we use in our com-
putational experiments.
3 BH-KMEANS ALGORITHM
Our algorithm first determines the initial position ¯c
j
for each cluster center j = 1, . . . , k by applying the
k-means++ procedure of (Arthur and Vassilvitskii,
2007). This procedure tends to find initial positions
that are far away from each other. The algorithm then
alternates between an object assignment and a cluster
center update step until a stopping criterion is met.
1. In the assignment step, the mixed-binary linear
program P (given below) is solved to assign the
objects to the cluster centers. Table 1 contains a
description of the notation.
P
Min.
n
∑
i=1
k
∑
j=1
d
i j
x
i j
+M p(
∑
(i,i
0
)∈CL
y
ii
0
+
∑
(i,i
0
)∈ML
z
ii
0
) (1)
s.t.
k
∑
j=1
x
i j
= 1 (i = 1, . . . , n) (2)
n
∑
i=1
x
i j
≥ 1 ( j = 1, . . . , k) (3)
x
i j
+ x
i
0
j
≤ 1 + y
ii
0
((i, i
0
) ∈ CL; j = 1, . . . , k) (4)
x
i j
− x
i
0
j
≤ z
ii
0
((i, i
0
) ∈ ML; j = 1, . . . , k) (5)
x
i j
∈ {0, 1}
(i = 1, . . . , n; j = 1, . . . , k) (6)
y
ii
0
≥ 0 ((i, i
0
) ∈ CL) (7)
z
ii
0
≥ 0 ((i, i
0
) ∈ ML) (8)
The objective function consists of two terms. The
first term computes the total Euclidean distance
between the objects and the centers of the clusters
to which they are assigned to. The second term
computes the total penalty that results from vio-
lating ML and CL constraints. Each violation of
an ML or CL constraint contributes Mp to the ob-
jective function, where parameter M is the maxi-
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
196

Table 1: Notation.
Sets
ML Must-link pairs
CL Cannot-link pairs
Parameters
n Number of objects
k Number of clusters
¯c
j
Center of cluster j
d
i j
Euclidean distance between object v
i
and
center ¯c
j
M Maximum distance (max
i=1,...,n; j=1...,k
d
i j
)
p Control parameter for penalty
Decision variables
x
i j
=1, if object i is assigned to cluster j; =0,
else
y
ii
0
Auxiliary variables that capture violations
of CL constraints
z
ii
0
Auxiliary variables that capture violations
of ML constraints
mum distance between any object i and any clus-
ter center j and parameter p is user-defined. Note
that M must be recomputed in each assignment
step, because the positions of the cluster centers
change in the update step. Constraints (2) ensure
that each object is assigned to exactly one cluster.
Constraints (3) guarantee that each cluster con-
tains at least one object. Constraints (4) incorpo-
rate the CL constraints. The auxiliary variable y
ii
0
must be set to one if objects i and i
0
are assigned to
the same cluster j. Constraints (5) incorporate the
ML constraints. The auxiliary variable z
ii
0
must
be set to one if objects i and i
0
are assigned to
different clusters. Constraints (6)–(8) define the
domains of the decision variables.
2. In the update step, the positions of the cluster
centers are recomputed as follows. With C
j
being
the set of objects assigned to cluster j, the new
cluster center is then computed as ¯c
j
=
∑
i∈C
j
v
i
|C
j
|
.
Let OFV
t
be the objective function after t update
steps. The algorithm alternates between the assign-
ment and update step until either a predefined time
limit has been reached or if OFV
t−1
− OFV
t
is non-
positive. We implemented these stopping criteria be-
cause we have no proof that the algorithm is guaran-
teed to converge. Since the k-means++ procedure is a
randomized procedure, we obtain different solutions
when we apply the BH-kmeans algorithm with differ-
ent random seeds. A version of the BH-kmeans al-
gorithm that treats all ML and CL constraints as hard
constraints is presented in (Baumann, 2020).
4 COMPUTATIONAL ANALYSIS
WITH NOISE-FREE
CONSTRAINTS
In this section, we experimentally compare the per-
formance of the BH-kmeans algorithm to the perfor-
mance of the DILS algorithm. In Section 4.1, we
describe the problem instances. In Section 4.2, we
briefly describe the DILS algorithm. In Section 4.3,
we explain the performance measures that we use to
evaluate the algorithms. Finally, in Section 4.4, we
explain the experimental design and report the numer-
ical results.
4.1 Problem Instances
We use the 25 data sets from (Gonz
´
alez-Almagro
et al., 2020). This collection includes data sets which
have non-convex clusters that the standard (uncon-
strained) k-means algorithm fails to discover. We did
not perform any preprocessing of these data sets with
one exception. In the data set Saheart, we replaced
the two non-numeric categories Present and Absent
of the binary feature “Famhist” with one and zero, re-
spectively. (Gonz
´
alez-Almagro et al., 2020) gener-
ated four different constraint sets for each of the 25
data sets. The four constraint sets are associated with
the four percentages 5%, 10%, 15%, and 20% and are
thus named CS5, CS10, CS15, and CS20. The num-
ber of constraints in the constraint sets is
n
f
(n
f
−1)
2
,
with n
f
= dn × f e, where n is the number of objects in
the data set and f the percentage associated with the
constraint set. Note that all constraints in these con-
straint sets are sampled from the ground truth, i.e.,
they are noise free. We noticed however, that the
constraint sets for the data sets Iris and Wine con-
tain ML and CL constraints that do not comply with
the ground truth. For these two data sets, we gen-
erated our own constraint sets according to the pro-
cedure described in (Gonz
´
alez-Almagro et al., 2020).
The newly generated constraint sets are available on
github
1
. The data sets and the other constraint sets
can be downloaded by using the links provided in
(Gonz
´
alez-Almagro et al., 2020). Since there are four
constraint sets for each data set, the test set comprises
100 problem instances.
4.2 Benchmark Algorithm
We use as benchmark the DILS algorithm of
(Gonz
´
alez-Almagro et al., 2020). The DILS algo-
rithm is a metaheuristic that keeps only two indi-
1
https://github.com/phil85/BH-kmeans
A k-Means Algorithm for Clustering with Soft Must-link and Cannot-link Constraints
197

viduals in memory at all times. Mutation and re-
combination operations are applied to the two indi-
viduals to escape from local optima. After applying
the mutation and recombination operations, an iter-
ative local search procedure is used to improve the
two individuals. The DILS algorithm outperformed
six established algorithms for clustering with ML and
CL constraints in a recent computational comparison
(Gonz
´
alez-Almagro et al., 2020). The comparison in-
cluded the COP-kmeans algorithm and the LCVQE
algorithm that we mention in the introduction, the
two views clustering algorithm (TVClust) and the
relation dirichlet process algorithm (RDP-means) of
(Khashabi et al., 2015), the biased random-key ge-
netic algorithm with local search (BRKGA + LS) of
(de Oliveira et al., 2017), and the constrained eviden-
tial c-means algorithm (CECM) of (Antoine et al.,
2012). Since the DILS algorithm outperformed the
other algorithms, we do not include the other algo-
rithms in our comparison.
4.3 Performance Measures
We use the following four measures to assess the per-
formance of the algorithms. First, we compute the
Adjusted Rand Index (ARI) to assess the ability of
the algorithms to discover a ground truth assignment.
This ability is important if the algorithms are em-
ployed as semi-supervised algorithms for classifica-
tion tasks. In most data sets used here, the ground
truth assignment does not form well-separated clus-
ters of convex shape. Hence, to discover the ground
truth assignment it is necessary to consider the ML
and CL constraints. The ARI takes as inputs the true
labels and the labels assigned by the clustering algo-
rithm and outputs a value in the interval [-1, 1]. A
value close to 1 indicates a high agreement between
the respective partitions and a value close to 0 indi-
cates a low agreement. A value below zero indicates
that the agreement is smaller than the expected agree-
ment that would result when comparing the true parti-
tion to a random partition. Second, we use the within-
cluster sum-of-squares criterion (WCSS) to assess the
ability of the algorithms to detect homogeneous clus-
ters. This criterion corresponds to the sum of the
squared Euclidean distances between objects and the
centroid (mean) of the cluster they are assigned to.
Third, we determine the total number of constraint
violations to assess the ability of the algorithm to sat-
isfy the ML and CL constraints. Fourth, we record
the running time to assess the scalability of the algo-
rithms.
4.4 Numerical Results
We applied the BH-kmeans algorithm and the DILS
algorithm (with default settings) three times to each
problem instance, each time with a different random
seed. We imposed a time limit of 1,800 seconds per
repetition for both algorithms. For the BH-kmeans al-
gorithm, we additionally imposed a solver time limit
of 200 seconds per assignment problem. We set the
control parameter p of the BH-kmeans algorithm to
1.0 for all problem instances. We implemented the
BH-kmeans algorithm in Python 3.8 and used Gurobi
9.5 as solver. The implementation is available on
github
2
. To obtain an additional reference, we also
applied the standard (unconstrained) k-means algo-
rithm three times to the 25 data sets. All computa-
tions were executed on an HP workstation with two
Intel Xeon CPUs with clock speed 3.30 GHz and 256
GB of RAM.
First, we compare the algorithms in terms of ARI
values. Table 2 reports for each algorithm and each
combination of data set and constraint set the aver-
age ARI values over the three repetitions. The best
average ARI value that was obtained for each combi-
nation of data set and constraint set is highlighted in
bold face. The last row of the table provides the aver-
age ARI values for each algorithm and constraint set.
The last column reports the average ARI values that
were obtained with the standard (unconstrained) k-
means algorithm. The BH-kmeans algorithm outper-
forms the DILS algorithm on the vast majority of the
100 problem instances. The outperformance is par-
ticularly large for the smaller constraint sets CS5 and
CS10. By transitivity, we assume that the BH-kmeans
algorithm also outperforms all algorithms that were
outperformed by the DILS algorithm in the compara-
tive study of (Gonz
´
alez-Almagro et al., 2020).
Second, we compare the algorithms in terms of
the homogeneity of the identified clusters using the
WCSS criterion. Table 3 reports the average WCSS
values of the two algorithms for all instances. The
KMEANS column reports the average WCSS val-
ues that were obtained with the standard (uncon-
strained) k-means algorithm. The GT column re-
ports the WCSS values of the respective ground truth
assignments. We can see that the BH-kmeans al-
gorithm finds more homogeneous clusters than the
DILS algorithm. With increasing size of the con-
straint sets, the homogeneity of the clusters identified
with the BH-kmeans algorithm decreases and gener-
ally approaches the homogeneity of the clusters in the
ground truth assignment. The clusters identified with
the DILS algorithm have on average larger WCSS
2
https://github.com/phil85/BH-kmeans
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
198

Table 2: Average ARI values of the BH-kmeans algorithm (Here) and the DILS algorithm. Larger values indicate a higher
agreement with the ground truth assignment.
CS5 CS10 CS15 CS20
Here DILS Here DILS Here DILS Here DILS KMEANS
Appendicitis 0.487 0.031 0.607 0.523 1.000 0.732 1.000 1.000 0.328
Breast Cancer 0.940 0.568 0.986 1.000 1.000 1.000 1.000 1.000 0.665
Bupa 0.008 0.021 0.869 0.954 1.000 1.000 1.000 1.000 -0.007
Circles 0.004 0.163 0.846 0.838 1.000 1.000 1.000 1.000 -0.002
Ecoli 0.348 0.022 0.749 0.129 0.930 0.623 0.975 0.828 0.377
Glass 0.263 -0.025
0.383 0.022 0.862 0.375 0.933 0.793 0.227
Haberman 0.203 0.006 0.928 0.847 1.000 1.000 1.000 1.000 -0.001
Hayesroth 0.051 -0.015 0.137 0.038 0.978 0.514 0.920 0.925 0.070
Heart 0.607 0.227 0.913 0.885 1.000 1.000 1.000 1.000 0.476
Ionosphere 0.378 0.034 0.951 0.921 1.000 1.000 1.000 1.000 0.168
Iris 0.704 0.623 0.673 0.607 0.625 0.566 0.642 0.566 0.611
Led7Digit 0.440 0.129 0.604 0.107 0.874 0.109 0.994 0.131 0.478
Monk2 0.715 0.202 0.972 0.972 1.000 1.000 1.000 1.000 -0.002
Moons 0.671 0.417 0.987 0.987 1.000 1.000 1.000 1.000 0.470
Movement Libras 0.297 0.087 0.319 0.084 0.361 0.067 0.514 0.093 0.310
Newthyroid 0.811 -0.071
0.926 0.027 1.000 0.820 0.984 1.000 0.583
Saheart 0.451 0.068 0.974 0.974 1.000 1.000 1.000 1.000 0.068
Sonar 0.042 0.040 0.748 0.631 1.000 1.000 1.000 1.000 -0.002
Soybean 0.896 0.183 1.000 0.213 1.000 0.470 1.000 0.639 1.000
Spectfheart -0.029 0.236 0.855 0.966 1.000 1.000 1.000 1.000 -0.103
Spiral 0.086 0.107 0.858 0.842 1.000 1.000 1.000 1.000 0.008
Tae 0.066 0.009 0.091 0.023 0.706 0.592 0.960 0.940 0.064
Vehicle 0.084 0.041 0.959 0.329 1.000 0.815 1.000 0.833 0.073
Wine 0.915 0.352 0.933 0.578 0.933 0.584 0.950 0.609 0.897
Zoo 0.838 0.172 0.852 0.166 0.911 0.707 0.895 0.630 0.747
Mean 0.411 0.145 0.765 0.546 0.927 0.759 0.951 0.839 0.300
values than the clusters in the ground truth irrespec-
tive of the size of the constraint sets.
Third, we compare the algorithms in terms of
number of constraint violations. Table 4 lists for each
algorithm including the standard (unconstrained) k-
means algorithm the total number of ML and CL con-
straint violations across all data sets and repetitions
for the different constraint sets. The BH-kmeans al-
gorithm has almost no violations while the DILS al-
gorithm has several thousand violations.
Finally, we compare the algorithms in terms of
running time. Table 5 reports for each algorithm and
constraint set the total running time it took to perform
all repetitions on all data sets. While the DILS al-
gorithm reaches the imposed time limit for most in-
stances, the BH-kmeans algorithm requires only few
seconds to terminate for most instances. Hence, the
total running time of the BH-kmeans algorithm is
considerably smaller.
5 COMPUTATIONAL ANALYSIS
WITH NOISY CONSTRAINTS
In this section, we analyze the impact of varying
the penalty value associated with violating soft con-
straints, i.e., the control parameter p, on the perfor-
mance of the BH-kmeans algorithm. The goal is
to provide guidance for problem instances where the
noise level of the constraints is not known apriori. In
Section 5.1, we introduce the problem instances and
describe the experimental design. In Section 5.2, we
report and discuss the numerical results.
5.1 Problem Instances
For this experiment, we use the same 25 data sets
from (Gonz
´
alez-Almagro et al., 2020). However, we
generate nine new constraint sets for each data set that
differ with respect to the level of noise. For a data
set with n objects, we generate a constraint set with
noise level q as follows. We randomly select
n
f
(n
f
−1)
2
unique pairs of objects with n
f
= d0.1ne . Each pair
is added to the set of ML pairs or the set of CL pairs
depending on whether the true labels of the respec-
tive objects are the same or different. To introduce
noise, we then label a fraction of q ML pairs as CL
pairs and a fraction of q CL pairs as ML pairs. We
generated for each data set nine constraint sets with
q = 0, 0.05, . . . , 0.4.
Since there are nine constraint sets for each data
set, the test set comprises 225 problem instances. We
tested 60 different values for parameter p, namely:
p = 0, 0.01, . . . , 0.5, 0.55, . . . , 0.95. For each combi-
nation of problem instance and each value of param-
eter p, we applied the BH-kmeans algorithm three
A k-Means Algorithm for Clustering with Soft Must-link and Cannot-link Constraints
199
Table 3: Average WCSS values of the BH-kmeans algorithm (Here) and the DILS algorithm. Smaller values indicate a higher
homogeneity.
CS5 CS10 CS15 CS20
Here DILS Here DILS Here DILS Here DILS KMEANS GT
Appendicitis 493.0 738.6 544.2 603.3 612.9 629.6 612.9 612.9 451.8 612.9
Breast Cancer 12,090.6 13,860.3 12,185.0 12,214.6 12,214.6 12,214.6 12,214.6 12,214.6 11,595.5 12,214.6
Bupa 1,863.6 2,044.3 2,041.6 2,048.0 2,047.3 2,047.3 2,047.3 2,047.3 1,496.1 2,047.3
Circles 484.9 596.7 598.9 599.9 600.0 600.0 600.0 600.0 410.4 600.0
Ecoli 822.0 2,055.9 967.8 2,020.2 1,047.3 1,926.1 1,134.4 1,854.6 703.6 1,335.3
Glass 885.6 1,818.7
1,168.2 1,791.8 1,267.5 1,732.3 1,428.7 1,578.9 751.7 1,429.3
Haberman 813.4 870.1 889.4 893.6 891.4 891.4 891.4 891.4 684.4 891.4
Hayesroth 465.2 596.8 525.3 569.8 553.1 609.7 551.1 556.0 425.5 553.5
Heart 3,047.4 3,256.2 3,085.1 3,086.2 3,120.5 3,120.5 3,120.5 3,120.5 2,940.7 3,120.5
Ionosphere 10,284.5 11,254.3 10,944.9 11,021.0 10,971.5 10,971.5 10,971.5 10,971.5 9,086.0 10,971.5
Iris 146.4 173.1 146.9 196.9 141.2 220.7 145.1 220.7 141.0 167.9
Led7Digit 1,226.3 2,581.9 1,461.8 2,839.3 1,450.2 2,939.7 1,511.1 2,990.6 1,108.8 1,511.4
Monk2 2,359.1 2,479.7 2,382.7 2,384.1 2,384.3 2,384.3 2,384.3 2,384.3 2,160.0 2,384.3
Moons 285.1 383.7 322.1 322.1 322.9 322.9 322.9 322.9 249.7 322.9
Movement Libras 11,125.4 22,702.1 11,989.6 23,702.7 16,067.3 26,757.1 18,342.1 27,356.3 10,495.6 19,779.5
Newthyroid 506.1 1,063.0
536.0 1,041.8 550.9 643.7 550.4 550.9 462.3 550.9
Saheart 3,768.0 3,911.0 3,924.3 3,924.3 3,927.7 3,927.7 3,927.7 3,927.7 3,235.8 3,927.7
Sonar 11,360.5 12,113.8 11,873.8 11,987.8 11,962.9 11,962.9 11,962.9 11,962.9 10,649.4 11,962.9
Soybean 377.6 732.0 367.1 751.0 367.1 543.1 367.1 581.9 367.1 367.1
Spectfheart 10,660.1 11,381.6 11,210.5 11,281.3 11,268.3 11,268.3 11,268.3 11,268.3 8,983.9 11,268.3
Spiral 465.4 490.7 558.7 559.3 564.5 564.5 564.5 564.5 376.5 564.5
Tae 481.6 663.5 608.8 652.5 685.2 695.9 711.8 714.0 452.7 713.8
Vehicle 10,355.7 12,282.0 13,250.1 13,796.0 13,334.2 13,619.8 13,334.2 13,573.9 6,211.1 13,334.2
Wine 1,284.7 1,902.2 1,285.1 1,746.6 1,285.1 1,703.3 1,290.7 1,664.2 1,277.9 1,300.0
Zoo 562.2 1,255.1 564.9 1,178.6 567.1 853.6 572.3 816.8 525.6 579.6
Mean 3,448.6 4,448.3 3,737.3 4,448.5 3,928.2 4,526.0 4,033.1 4,533.9 3,009.7 4,100.5
Table 4: Total number of constraint violations of the BH-
kmeans algorithm (Here), the DILS algorithm, and the k-
means algorithm .
Here DILS KMEANS
Constraint set
CS5 0.0 213.0 3,707.0
CS10 1.0 1,507.0 14,403.0
CS15 0.0 2,146.0 32,162.0
CS20 4.0 4,006.0 58,113.0
SUM 5.0 7,872.0 108,385.0
Table 5: Total running time of the BH-kmeans algorithm
(Here), the DILS algorithm, and the k-means algorithm .
Here DILS KMEANS
Constraint set
CS5 135.9 95,454.5 98.6
CS10 571.3 97,577.6 94.8
CS15 686.6 101,798.5 95.6
CS20 1,840.0 107,416.7 98.3
SUM 3,233.8 402,247.3 387.2
times, each time with a different random seed. With
225 instances, 60 values of parameter p, and three
seeds, we ran the BH-kmeans algorithm 40,500 times.
For each repetition, we imposed an overall time limit
of 600 seconds and a solver time limit of 200 seconds.
5.2 Numerical Results
We first study the relationship between parameter p
and the average ARI values. The nine plots in Fig-
ure 1 visualize the relationship between parameter p
and the average ARI value across all data sets and rep-
etitions for the nine constraint sets with different noise
levels. In each plot, we highlighted in light green the
range of penalty values that led to average ARI val-
ues that are within 2.5% of the highest average ARI
value in the respective plot. The intersection of the
light green ranges is highlighted in dark green. We
can draw the following conclusions from Figure 1.
• If the ML and CL constraints are noise-free, any
value for parameter p that is larger than 0.2 leads
to good average results.
• As the noise level increases, the range of good val-
ues for p tends to get smaller and moves to the
left.
• With parameter p ∈ [0.18, 0.20] the algorithm per-
forms well across noise levels. This insight is use-
ful for situations where it is difficult or impossible
to determine the noise level in the constraint set.
Note that Figure 1 displays average results across data
sets. Although the pattern shown in Figure 1 is repre-
sentative for many individual data sets as well, there
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
200
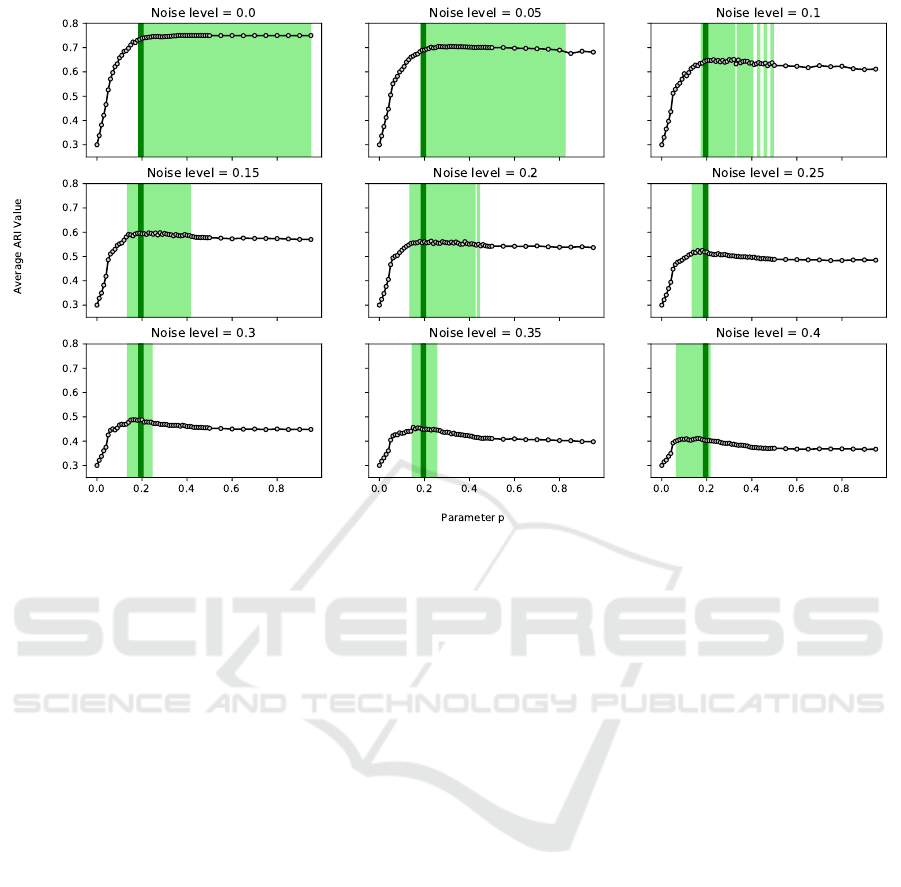
Figure 1: The nine plots visualize the relationship between parameter p and the ARI value averaged across data sets and
repetitions for the nine constraint sets with different noise levels. The range of penalty values that led to average ARI values
that are within 2.5% of the highest average ARI value obtained for the respective noise level are highlighted in light green.
The intersection of the light green ranges is highlighted in dark green.
are some data sets where values for parameter p that
are close to zero deliver the best ARI values for noisy
constraint sets. These are often data sets where the
original (unconstrained) k-means algorithm already
performs well. For those data sets, adding ML and
CL constraints is often only helpful if the constraints
are noise-free. With p = 0, the BH-kmeans algorithm
corresponds to the standard (unconstrained) k-means
algorithm.
Next, we analyze the relationship between pa-
rameter p and the average running time in seconds.
The nine plots in Figure 2 visualize the relationship
between parameter p and the average running time
across all data sets and repetitions for the nine con-
straint sets with different noise levels. The running
time tends to increase with increasing value of pa-
rameter p and increasing noise level. However, the
overall impact of parameter p on the running time is
moderate. A value of p ∈ [0.18, 0.20] is also a good
choice with respect to running time.
6 CONCLUSIONS
Despite the great algorithmic advances in integer op-
timization during the last 25 years, the use of mixed-
integer optimization is still relatively rare in con-
strained clustering. This paper demonstrates the po-
tential of mixed-integer optimization in this field. We
propose a variant of the k-means algorithm that uses
mixed-integer optimization to incorporate ML and CL
constraints as soft constraints that can be violated sub-
ject to a penalty. The performance of our algorithm on
a large set of benchmark instances is superior to that
of the state-of-the-art algorithm. We also provided
guidelines on how to determine the penalty value for
violating constraints when the ML and CL constraints
are noisy.
Inspired by the results reported here, we extended
the BH-kmeans algorithm such that the user can spec-
ify individual penalties for ML and CL constraints.
This feature is useful in situations where the experts
state ML and CL constraints with different levels of
confidence. In the extended version, the user can
additionally define a subset of pairwise constraints
that will be treated as hard constraints. The extended
version also includes a preprocessing procedure that
contracts objects that are transitively connected by
hard ML constraints and a technique that reduces the
number of variables and constraints in the mixed-
binary linear programming formulation. Due to lack
of space, we will present the features of the extended
version together with computational results in another
paper.
A k-Means Algorithm for Clustering with Soft Must-link and Cannot-link Constraints
201
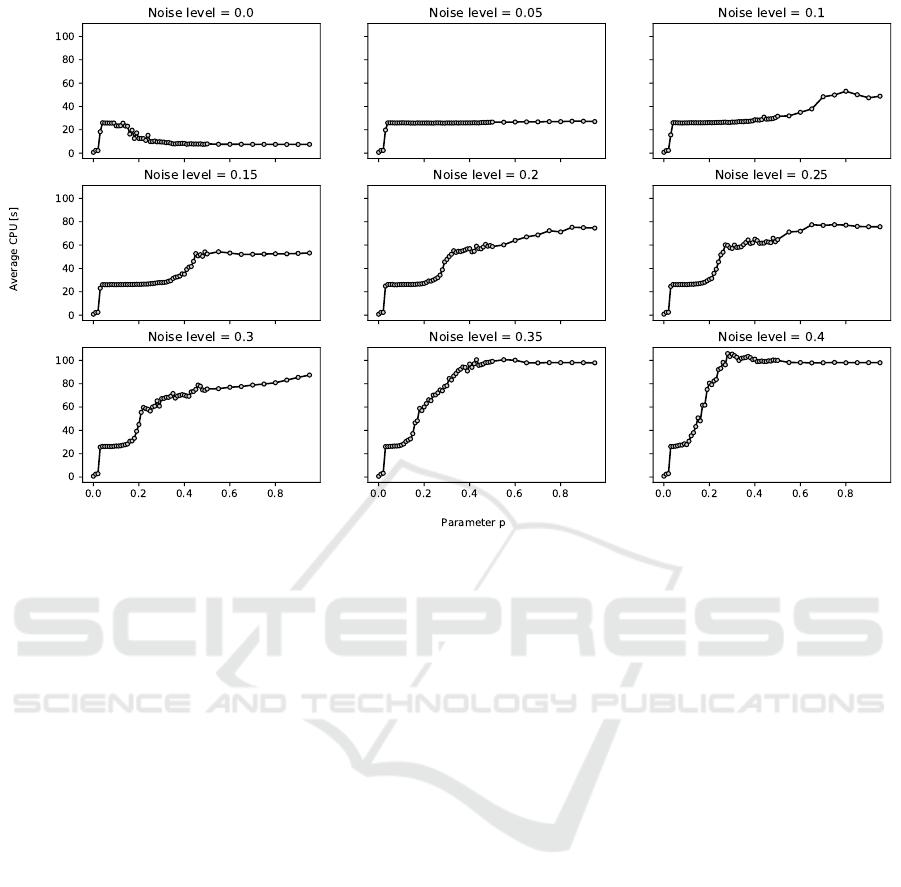
Figure 2: The nine plots visualize the relationship between parameter p and the running time averaged across data sets and
repetitions for the nine constraint sets with different noise levels.
REFERENCES
Antoine, V., Quost, B., Masson, M.-H., and Denoeux, T.
(2012). Cecm: Constrained evidential c-means al-
gorithm. Computational Statistics & Data Analysis,
56(4):894–914.
Arthur, D. and Vassilvitskii, S. (2007). k-means++: The ad-
vantages of careful seeding. In Gabow, H., editor, Pro-
ceedings of the Eighteenth Annual ACM-SIAM Sym-
posium on Discrete Algorithms, pages 1027–1035,
Philadelphia, Pennsylvania USA.
Basu, S., Banerjee, A., and Mooney, R. J. (2004). Active
semi-supervision for pairwise constrained clustering.
In Proceedings of the 2004 SIAM international con-
ference on data mining, pages 333–344. SIAM.
Baumann, P. (2020). A binary linear programming-based
k-means algorithm for clustering with must-link and
cannot-link constraints. In 2020 IEEE International
Conference on Industrial Engineering and Engineer-
ing Management (IEEM), pages 324–328. IEEE.
Davidson, I. and Ravi, S. (2005). Clustering with con-
straints: Feasibility issues and the k-means algorithm.
In Proceedings of the 2005 SIAM international con-
ference on data mining, pages 138–149. SIAM.
de Oliveira, R. M., Chaves, A. A., and Lorena, L. A. N.
(2017). A comparison of two hybrid methods for con-
strained clustering problems. Applied Soft Computing,
54:256–266.
Ganji, M., Bailey, J., and Stuckey, P. J. (2016). La-
grangian constrained clustering. In Proceedings of the
2016 SIAM International Conference on Data Mining,
pages 288–296. SIAM.
Gonz
´
alez-Almagro, G., Luengo, J., Cano, J.-R., and Garc
´
ıa,
S. (2020). DILS: constrained clustering through dual
iterative local search. Computers & Operations Re-
search, 121:104979.
Khashabi, D., Wieting, J., Liu, J. Y., and Liang, F. (2015).
Clustering with side information: From a probabilis-
tic model to a deterministic algorithm. arXiv preprint
arXiv:1508.06235.
Lampert, T., Dao, T.-B.-H., Lafabregue, B., Serrette,
N., Forestier, G., Cr
´
emilleux, B., Vrain, C., and
Ganc¸arski, P. (2018). Constrained distance based clus-
tering for time-series: a comparative and experimen-
tal study. Data Mining and Knowledge Discovery,
32(6):1663–1707.
Pelleg, D. and Baras, D. (2007). K-means with large and
noisy constraint sets. In European Conference on Ma-
chine Learning, pages 674–682. Springer.
Wagstaff, K., Cardie, C., Rogers, S., Schr
¨
odl, S., et al.
(2001). Constrained k-means clustering with back-
ground knowledge. In Proceedings of the Eigh-
teenth International Conference on Machine Learn-
ing, pages 577–584.
Wu, B., Zhang, Y., Hu, B.-G., and Ji, Q. (2013). Con-
strained clustering and its application to face cluster-
ing in videos. In Proceedings of the IEEE conference
on Computer Vision and Pattern Recognition, pages
3507–3514.
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
202
