
Formal Scenario-driven Logical Spaces for Randomized Synthetic Data
Generation
Osama Maqbool and J
¨
urgen Roßmann
Institute for Man-Machine-Interaction, RWTH Aachen University, Germany
Keywords:
Logical Scenarios, Randomization, Synthetic Data.
Abstract:
Simulations and synthetic data are a necessary supplement to real-world experiments in order to alleviate its
effort, cost and risks. As demand of data for development and validation increases, simulations too must cor-
respondingly be scaled. Variation of simulation parameters affords simulation designers control over the scope
of how a simulation is scaled— they can chose a balance between target distribution of simulation variants
and the degree of randomness— thereby achieving both the volume and diversity of synthetic data. This paper
proposes logical scenarios as basis for simulation variation. Scenarios are formal human-readable scripts of
simulations and test drives used within the automotive industry. They are defined at different abstraction lev-
els, one of which is the logical scenario as a parameterized simulation model with description for parameters
instead of concrete values. This contribution proposes methodologies to model the parameter descriptions in a
modular fashion with parameter ranges, probability distributions and inter-relations. A randomization engine
is introduced based on Markov chain Monte-Carlo methods to efficiently sample the modeled space. The re-
sult is a variety of simulation-independent concrete scenarios that follow the formal scenario specification.
1 INTRODUCTION
The growth of intelligent systems in various opera-
tional domains is marked by a significant increase
in the complexity of systems, which has created de-
mands for new and innovative strategies throughout
the system life-cycle: from development through vali-
dation to maintenance. Based often on Artificial Intel-
ligence, complex systems depend on diverse and am-
ple training data, and the high complexity also neces-
sitates a validation strategy in a large number of op-
erational situations. Case in point is the Automobile
Industry, where Wachenfeld and Winner (Wachenfeld
and Winner, 2016) estimate 6.62 billion test kilome-
ters for the validation of autonomous driving func-
tions.
A natural alternative to costly real-world experi-
ments is generating synthetic data from simulations.
This is achieved in a number of examples in dif-
ferent ways. A single or set of parameters may be
varied per a given distribution to study a particular
aspect of the whole system (Wagner et al., 2018),
the operational domain of a system may be random-
ized (Khirodkar et al., 2019), or a systematic varia-
tion approach may be built up allowing the designer
full control over data distribution (Ben Abdessalem
et al., 2016). This contribution considers a formal
scenario-based approach (Menzel et al., 2018) cou-
pled with digital twins for generating synthetic data
in a systematic manner. Scenarios are used within
the automotive industry as standardized descriptions
of a scene flow and are used mainly for validation
of complex Automated Driving Systems (ADS). Sce-
narios can be parameterized to create logical spaces,
wherein parameter values may be varied to gener-
ate a variety of concrete scenarios. This method of
parameter variation offers various advantages: a) it
works with simulation-independent and standardized
formats for describing situations, b) it generates se-
mantically correct data i.e. a valid scenario, and c)
it has potential applicability throughout the develop-
ment life-cycle due to the inherent integrate-ability of
scenarios throughout the cycle (Sippl et al., 2019).
This paper proposes a layered approach for mod-
eling the logical space of scenarios — specified via
a test specification — a proposed addition to for-
mal scenario specifications. Parameters may be mod-
eled using reusable building blocks in a piece-wise
manner, with corresponding probability distributions,
and may be constrained together via inter-parameter
constraints. A randomization engine is introduced
to sample the multi-dimensional parameter space (or
Maqbool, O. and Roßmann, J.
Formal Scenario-driven Logical Spaces for Randomized Synthetic Data Generation.
DOI: 10.5220/0010816400003119
In Proceedings of the 10th International Conference on Model-Driven Engineering and Software Development (MODELSWARD 2022), pages 203-210
ISBN: 978-989-758-550-0; ISSN: 2184-4348
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
203

logical space) via variants of Markov chain Monte-
Carlo Sampling. The resulting concrete scenarios are
brought to life in a multi-domain 3D simulation en-
gine, within which the complete framework is inte-
grated as a dynamic library.
The rest of the paper is organized as follows. Sec-
tion 2 presents the related work, Section 3 gives an
overview of different types of scenarios. Section 4
explains in detail the modeling approach for logical
spaces and corresponding sampling methods. Section
5 presents two exemplary cases from the automotive
domain, and Section 6 concludes the work.
2 RELATED WORK
Variation or randomization of simulation parameters
has different purposes. One of the most common ap-
plications is the sensitivity analysis (Hartjen et al.,
2019) of parameters. Within machine learning appli-
cations, domain randomization (Tobin et al., 2017) is
used to increase the diversity of data and is especially
beneficial in transfer learning applications. Genera-
tive Adversarial Neural Networks are neural networks
(Goodfellow et al., 2014) that may be trained to gen-
erate synthetic data targeted towards challenging the
system under training.
Systematic variation approaches target solely on
the variation aspect and attempt to build models or
grammar which inherently cater to the semantic cor-
rectness of a scenario. (Jiang et al., 2018) devel-
oped a stochastic grammar, which combined with
a photo-realistic simulator yields valid 2D and 3D
scenes. (Bagschik et al., 2018) developed an ontology
for knowledge representation of automotive scenarios
from which varied traffic scenes can be derived. (Feng
et al., 2021) identifies decision parameters from a sce-
nario description, and uses criticality metrics based on
the decision variables to generate a testing scenario li-
brary.
Domain Specific Languages (DSL) provide users
with a programming framework where the scenario
execution can be described with value and probabil-
ity distribution constraints. ASAM OpenScenario 2.0
standard (ASAM, 2021c) follows this approach. A
comparable approach is the Scenic language (Fre-
mont et al., 2019), a probabilistic programming lan-
guage (PPL) designed for automotive scenarios. PPLs
allow construction of probability distributions via ex-
pressive conditional constraints between variables.
(Fremont et al., 2020) uses the formal probabilistic
description in Scenic for test-case generation of au-
tonomous vehicle safety scenarios.
DSLs with PPL-like attributes provide both ex-
pressiveness and a detailed control over design of
variation space. However, the mentioned approaches
are lacking on mathematical constraints between vari-
ables, which are crucial for 3D simulation, e.g. to
place bounds on variation of trajectories and object
geometries. This contribution focuses on the mathe-
matical relations and inference techniques to samples
with such constraints.
3 BACKGROUND ON
SCENARIOS
Formal scenarios considered within this contribution
were introduced in the PEGASUS project (Winner
et al., 2019) as a validation strategy for complex au-
tomotive systems. A scenario is a simulation script
or story, formally defined as “the temporal develop-
ment between several scenes in sequence of scenes”,
enriched by entities, actions and events, goals and val-
ues (Ulbrich et al., 2015).
3.1 Abstraction Levels
(Menzel et al., 2018) proposes three levels of scenario
abstraction: functional, logical and concrete scenar-
ios. Functional scenarios are at the highest level
of abstraction, composed of semantic information in
natural language, providing a common platform for
cross-domain experts. On the other end, a concrete
scenario contains state space variables and concrete
parameters describing the environment, entities and
their relations to each other. Logical scenarios are in
the middle; they contain the state space variables de-
scribing the environment, entities and relations, but
describe parameter ranges instead of concrete values.
3.2 Randomizing Scenarios
The logical space offers a systematic playground to
specify variations of a scenario. Figure 1 illustrates
a modeling approach for an automotive scenario.
The static and dynamic aspects are typically speci-
fied via the ASAM OpenDRIVE (ASAM, 2021a) and
OpenSCENARIO (ASAM, 2021b) standards respec-
tively. The test specification file is a proposed addi-
tion to the formal scenario specification, an XML-file
which refers to parameters within existing specifica-
tion files, along with their ranges, probability distri-
butions, parameter- and inter-parameter constraints,
thereby providing a systematic modeling approach for
the logical space. Once modeled, a randomization en-
gine is proposed as the variation methodology to gen-
erate concrete scenario variants based on the logical
MODELSWARD 2022 - 10th International Conference on Model-Driven Engineering and Software Development
204
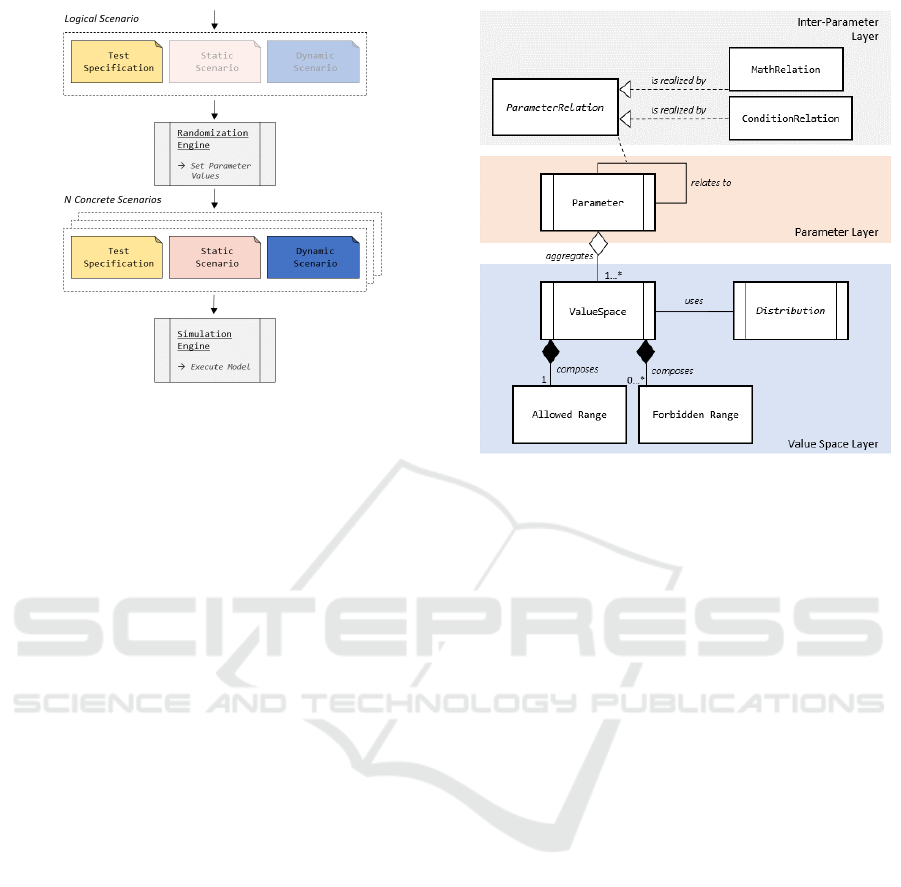
Figure 1: Test specification based description of logical sce-
narios.
space specification. The randomization engine uses
Monte-Carlo based sampling of the modeled logical
space. It works independently of the scenarios them-
selves, and is capable of taking mathematical and con-
ditional constraints into account to sample from the
specified distributions.
4 MODELING AND SAMPLING
LOGICAL SPACES
A concrete scenario consists of a sequence of input
data ¯u(t), e.g. sensor data, initial states ¯s
0
and param-
eters ¯p. Based on the data, a simulation engine uses a
digital twin M of a system to generate state trajecto-
ries.
¯s(t) = M( ¯s
0
, ¯u(t), ¯p, t) ¯s, ¯s
0
∈ S, ¯u ∈ U, ¯p ∈ L (1)
S, U, L are the domains of their respective vari-
ables. In order to create variants of concrete scenar-
ios, one can thus vary the static elements ¯p by tak-
ing samples from L.The initial state values ¯s
0
are also
static and can be varied in a similar fashion. There-
from follows the formal definition for logical space
modeling:
Logical space modeling is the modeling of
L, i.e. constituent values, constraining con-
ditions and probability distribution functions
that dictate whether and how often a value
may be drawn.
Figure 2: Layered approach for logical space modeling. Re-
lations are read from left to right or top to bottom.
4.1 Modeling Methodology
The approach for modeling logical space L is illus-
trated in Figure 2. Starting from bottom to top, each
layer builds some part of the logical space, and subse-
quent layers use the pre-built spaces to construct more
complex spaces. Each layer is self-contained, and
can be used independently to generate samples. The
figure serves as a modeling guideline as well as the
software architecture for the test specification reader,
which must parse the XML elements and create corre-
sponding entities (e.g. C++ objects). These are subse-
quently used by the randomization engine to generate
samples (see Section 4.2).
4.1.1 Value Space Layer
This layer is the basic building block of the logical
space. A value space is a continuous range or a dis-
crete set from which a single parameter may draw val-
ues. The space is defined by allowed and forbidden
ranges (or sets for discrete parameters). A probabil-
ity distribution must be specified at this level to dic-
tate how samples shall be drawn from the value space.
Figure 3 illustrates a value space specified in the test
specification for the speed of a vehicle on a highway,
defined with an allowed and forbidden range, and a
gaussian probability distribution.
Formal Scenario-driven Logical Spaces for Randomized Synthetic Data Generation
205

Figure 3: Value space in the test specification.
4.1.2 Probability Distribution
The probability distribution can be specified individu-
ally for each parameter, or a multi-variate distribution
may be specified for multiple parameters. The distri-
bution can be derived from user knowledge as analyt-
ical models or from data as data-driven functions, and
it must be implemented within the test specification
reader inheriting from Distribution (see Figure 2). It
can then be referred to in the test specification XML.
Example is the gaussian distribution specified in Fig-
ure 3.
4.1.3 Parameter Layer
Whereas value spaces have no direct meaning for the
system per se, parameters refer to the properties of a
concrete digital twin a system (and thereby also the
real system). The same value space may be used by
multiple parameters and multiple value spaces may be
used by the same parameter, each with its occurrence
likelihood. The multiplicity of value spaces allow the
creation of discontinuous parameter ranges, diversi-
fied probability distributions and isolation of different
operational domains of a parameter. Figure 4 illus-
trates an example of the parameter vehicle speed of a
given ego vehicle, which may sample from two value
spaces with an equal likelihood.
Figure 4: Parameter specification in the test specification.
4.1.4 Inter-Parameter Layer
The Inter-Parameter Layer allows the binding of
various parameters through inter-parameter relations.
Two types of relations are possible.
Mathematical Constraints: The parameters p
i
can
be bounded with each other via mathematical con-
straints
C
e
( ¯p) =
(
g( ¯p) = 0
e( ¯p) ≥ 0,
(2)
where g and h specify the mathematical equalities
and inequalities respectively. An example of mathe-
matical constraints is illustrated in Figure 5 within the
XML-Tag MathRelation: speed of vehicle 1 must be
greater than that of vehicle 2 by at least 5 km/h during
an overtake scenario:
Figure 5: Specification of inter-parameter constraints.
Conditional Constraints: Conditional here refers
to the technical term in computer science, realized e.g.
as If-Then-Else type constructs in programming lan-
guages.
C
i
( ¯p) :
IF (p
0
= a ∧ p
1
∈ [b, c])
THEN (p
m
∈ [x, y])
.
.
.
(3)
The conditional constraints must be formulated
such that for a given set of concrete parameter val-
ues, all constraints C
i
can be evaluated to either true
or false. The XML-Tag CondRelation in Figure 5 il-
lustrates an example of a conditional relation: regard-
less of the specified distributions of vehicle speeds in
a scenario, they must be zero if the parameter “state
of traffic signal” is equal to “RED”.
4.2 Generating Samples
Generating samples from L is achieved via a random-
ization engine, a task equivalent to making inferences
about probability distributions. Harmonic with the
layered modeling approach, samples can be drawn
for each parameter individually or from the complete
multi-dimensional constrained space.
4.2.1 Sampling Value Spaces
Rejection sampling is used for drawing samples from
value spaces. Samples are drawn from the specified
distribution, and accepted only if the fall within the
specified ranges.
MODELSWARD 2022 - 10th International Conference on Model-Driven Engineering and Software Development
206

4.2.2 Sampling Parameters
Based on the occurrence frequency, an underlying
value space is chosen, and its local sampling function
is used to generate a sample.
4.2.3 Sampling Constrained Logical Space
The constrained logical space L consists of all the pa-
rameters as well as their inter-relations. The sampling
problem can be formulated in terms of a target distri-
bution f
T
over the parameter vector ¯p:
f
T
( ¯p) =
(
f
S
( ¯p) C
e
( ¯p) = 1 ∧ C
i
( ¯p) = 1
0 otherwise,
(4)
C
e
( ¯p) and C
i
( ¯p) are the mathematical and con-
ditional relations respectively. f
S
is the distribution
specified by the user, e.g. the gaussian distribution
specified in Figure 3. The target distribution differs
from the specified distribution in that it also takes
parameter constraints into account. It is equal to f
S
when constraints hold and drops to zero otherwise.
Samples therefore have to be drawn from the target
distribution f
T
, it is however not directly sample-able.
Rejection sampling, i.e. directly sampling from
f
S
and rejecting samples violating constraints, is an
obvious but inefficient candidate as the constraints
may exclude high frequency areas of the specified
distribution, leading to a very high rejection rate.
To efficiently handle such conflicts, two variants of
the Markov Chain Monte-Carlo (MCMC) method are
used which draw from a distribution that approxi-
mates f
T
. Essentially, they prescribe random sam-
pling (the Monte-Carlo part) using a proposal distri-
bution. The samples are drawn sequentially such that
the acceptance of any sample is dependent on its prob-
ability with respect to the target distribution, relative
to the previous sample, thus forming a Markov Chain.
4.2.4 Resolving Mathematical Constraints with
Metropolis Algorithm
The Metropolis algorithm (Roberts, 1996) is used by
randomization engine to resolve linear mathematical
constraints C
e
and approximate the target distribu-
tion f
T
. The approach is based on (Van den Meersche
et al., 2009), and has the following steps:
1. Choose a Mathematical Sub-space: A single
value space from each parameter is chosen for
every iteration. The linear inter-parameter con-
straints, as well as the allowed and forbidden
ranges of each value space are expressed as ma-
trices G and E.
(a) Metropolis algorithm with
different linear constraints.
(b) Gibbs algorithm with
different non-linear con-
straints.
C
e
( ¯p) =
(
G ¯p = h
E ¯p ≥ f.
(5)
This step is the prepping of the problem for
Metropolis algorithm.
2. Draw Random Points: A set of random points
is generated such that they satisfies C
e
by sam-
pling from a proposal distribution. This random
sampling is done via xsample(), an R function for
solving linear inverse problems (Van den Meer-
sche et al., 2009). The algorithm firstly eliminates
the equality constraints G ¯p = h by transforming
the parameter vector ¯p into a vector ¯p
∗
with lin-
early independent elements.
¯p = ¯p
0
+ Q ¯p
∗
(6)
Where ¯p
0
is a solution of G ¯p = h and Q serves as
a basis for the null space of G, such that Q
⊤
Q =
I and GQ = 0. Thus the boundaries are reduced
to a set of inequalities
EQ ¯p
∗
≥ f − E ¯p
0
. (7)
These inequalities are in-fact hyper-planes bound-
ing the area of interest. Given an initial point that
is within the hyper-planes, subsequent points are
sampled sequentially, each dependent on last and
each random. To generate a random point z
2
from
a given point z
1
, candidate z
∗
2
is chosen by an ar-
bitrary line from z
1
with length sampled from a
normal distribution.
z
∗
2
= z
1
+ η (8)
Formal Scenario-driven Logical Spaces for Randomized Synthetic Data Generation
207

If z
∗
2
lies within the inequalities in Equation 7,
it is accepted as a valid sample z
2
. Otherwise,
the point is “mirrored” across the first hyper-plane
that intersects this line. If the new point lies within
the bounds, it is accepted, otherwise the process is
repeated.
The random walk using the mirror algorithm en-
sures that the points are generated from a symmet-
ric distribution as required by MCMC, along with
a high acceptance rate.
3. Map Random Points to Target Distribution:
With a set of random points that all satisfy C
e
, a
subset of the points is mapped to f
T
. This is done
sequentially with the MCMC criterion. Given a
point z
2
and a previously accepted point z
1
, if
f
T
(z
2
)
f
T
(z
1
)
>= r, (9)
then the point is accepted, otherwise rejected, r
being between 0 and 1. The process is then re-
peated.
Samples within an initial burn-in phase are typically
ignored until the Markov chain converges to the tar-
get distribution. The choice of r is also important to
set the exploration-exploitation balance of the algo-
rithm — whether it converges quickly to a local peak
or chooses to explore low-density areas as well.
The algorithm results are illustrated in Figure 6a.
Red lines denote the bounding constraints. Working
with relative frequencies allow the algorithm to re-
duce rejection ratio yet still converge as best as possi-
ble to the specified distribution.
Non-linear Constraints: For non-linear, espe-
cially non-convex bounds, step 2 becomes a chal-
lenge. For this, another algorithm is introduced in the
next section which bypasses this step altogether.
4.2.5 Resolving Conditional Constraints with
Metropolis within Gibbs Algorithm
The Gibbs algorithm (Smith and Roberts, 1993) is
also a variant of the MCMC methods targeted more
towards multivariate distributions. The algorithm
uses the conditional probabilities rather than the joint
probability and is capable of handling non-linear con-
straints, conditional constraints and both at the same
time. The randomization engine applies a more robust
variant, the “Metropolis within Gibbs” algorithm , in
the following steps:
1. For the target distribution in Equation 4, choose a
valid initial sample for ¯p. This is done via rejec-
tion sampling.
¯p
0
= (p
0
0
, p
0
1
, ..., p
0
n
) (10)
2. Draw a sample for the first variable based on the
previous values of other variable samples:
f
T
(p
0
|p
0
1
, ..., p
0
n
). (11)
Since f
T
cannot be sampled directly, the sample
is drawn with the Metropolis algorithm, albeit dif-
ferently than before:
(a) Choose a random value for p
0
without taking
into account inter-parameter constraints C
e
and
C
i
.
(b) For a concrete sample p
∗
0
, accept the sample if
f
T
(p
∗
0
|p
0
1
, ..., p
0
n
)
f
T
(p
0
0
|p
0
1
, ..., p
0
n
)
> r, (12)
otherwise reject it. This is the step where the
constraints are taken into account. Since con-
straints C
e
are mathematical equalities and in-
equalities, and constraints C
i
are conditional
statements, evaluation of both must return ei-
ther true ( f
T
is equal to f
S
) or false ( f
T
is zero).
3. Draw a sample for the rest of the variables sim-
ilarly, using the new value of the previous vari-
ables in the conditional distribution in Equation
12. This completes one iteration, i.e. one com-
plete sample. The complete process is then re-
peated for further samples.
Figure 6b illustrates the results of Metropolis
within Gibbs, where the sampler converges to a nor-
mal distribution while being bounded within a 2-D
torus.
The Metropolis within Gibbs method offers more
flexibility than the Metropolis method, as a random
sample is drawn first and then checked for constraints,
making constraint handling simpler. Unlike Metropo-
lis, this order is feasible here as variation takes place
one dimension at a time, decreasing the likelihood of
invalid samples. However, the algorithm is compu-
tationally expensive, and puts additional requirement
on the implementation of Distribution, namely the
calculation of conditional distributions.
5 EXAMPLES
As examples, scenario-based logical space sampling
is applied to two automotive use-cases. The resulting
concrete scenarios contain the initial states and pa-
rameters for digital twins which are simulated within
the 3D simulation framework VEROSIM (Rossmann
et al., 2013). The simulation framework is equipped
to generate ground-truth sensor- and trajectory data
that can be used to bridge the data requirements for
training and validation purposes.
MODELSWARD 2022 - 10th International Conference on Model-Driven Engineering and Software Development
208

Figure 7: Randomizing static aspects of a scenario.
(a) Complete parameter
space exploration.
(b) Targeted parameter
space exploration.
(c) Simulation of the com-
plete parameter space.
(d) Simulation of the tar-
geted parameter space.
Figure 8: Investigating safe evasive maneuvers by random-
izing the dynamic scenario.
5.0.1 Randomizing Static Scenarios
Figure 7 illustrates an example of road layout ran-
domization, specified by the OpenDRIVE and Open-
SCENARIO formats. In this simple example, discrete
value sets with random distributions are assigned to
each of the following parameters of the scenario de-
scription: the road curvature, number of lanes, width
of lanes and the initial coordinates of traffic partici-
pants. No inter-parameter relations are specified. The
resulting variety of concrete scenarios can then serve
as basis for simulation within different environments.
5.0.2 Randomizing Dynamic Scenarios
Randomization of a dynamic scenario is illustrated in
Figure 8 (based on a scenario from (Atorf and Roß-
mann, 2018)). An autonomous car approaches a road
intersection while an oncoming truck takes a turn, cut-
ting the path of the car. Given a constant behavior of
the truck, the car must perform an evasive maneuver
to avoid a collision.
The car drives with a velocity v based on a set of
target path points, out which the point of curvature
p
arc
can be varied to achieve an evasive maneuver.
The logical space modeling is done in two steps:
1. Firstly, the logical space is specified for the pa-
rameters v and p
arc
by specifying feasible ranges
and assigning a uniform distribution to each pa-
rameter. The simulations of the resulting concrete
scenarios gives an overview of the collision and
no-collision parameter regions, illustrated in Fig-
ure 8a. Figure 8c shows the simulated vehicle tra-
jectories.
2. With an overview of the overall parameter space
characteristics, regions more likely to result in the
desired outcome (lower collisions) are isolated.
This is done by adding mathematical constraints
between v and p
arc
. These constraints are illus-
trated in Figure 8b as lines bounding the region
of interest. The results are a higher ratio of no-
collision points as well as the cleaner trajectory
paths in the simulation in Figure 8d. Thus a de-
tailed insight into the effects of parameter varia-
tion are achieved via iterative logical space mod-
eling.
6 CONCLUSIONS
This contribution introduced a systematic framework
for modeling logical scenarios and using them as a
basis for parameter variation and simulation indepen-
dent generation of diverse synthetic data. The XML-
based test specification of logical scenarios allows a
direct integration with formal scenario-based simu-
lations, but is not restricted to these. A promising
area of further research is the incorporation of the
proposed framework within existing domain specific-
and probabilistic programming languages in order to
provide the designer not just low level constraints in-
troduced here, but also higher-level modeling rules for
description of the complete scenario.
ACKNOWLEDGEMENTS
This work is part of the project “KImaDiZ”, sup-
ported by the German Aerospace Center (DLR) with
funds of the German Federal Ministry of Economics
and Technology (BMWi), support code 50 RA 1934.
Formal Scenario-driven Logical Spaces for Randomized Synthetic Data Generation
209

REFERENCES
ASAM (2021a). Asam opendrive. https://www.asam.net/
standards/detail/opendrive/. Accessed: 2021-08-10.
ASAM (2021b). Asam openscenario. https://www.asam.
net/standards/detail/openscenario/. Accessed: 2021-
08-10.
ASAM (2021c). Asam openscenario 2.0. https://www.
asam.net/project-detail/asam-openscenario-v20-1/.
Accessed: 2021-09-08.
Atorf, L. and Roßmann, J. (2018). Interactive analysis and
visualization of digital twins in high-dimensional state
spaces. In 2018 15th International Conference on
Control, Automation, Robotics and Vision (ICARCV),
pages 241–246. IEEE.
Bagschik, G., Menzel, T., and Maurer, M. (2018). Ontol-
ogy based scene creation for the development of au-
tomated vehicles. In 2018 IEEE Intelligent Vehicles
Symposium (IV), pages 1813–1820.
Ben Abdessalem, R., Nejati, S., Briand, L. C., and Stifter,
T. (2016). Testing advanced driver assistance systems
using multi-objective search and neural networks. In
2016 31st IEEE/ACM International Conference on
Automated Software Engineering (ASE), pages 63–74.
Feng, S., Feng, Y., Yu, C., Zhang, Y., and Liu, H. X.
(2021). Testing scenario library generation for con-
nected and automated vehicles, part i: Methodology.
IEEE Transactions on Intelligent Transportation Sys-
tems, 22(3):1573–1582.
Fremont, D. J., Dreossi, T., Ghosh, S., Yue, X.,
Sangiovanni-Vincentelli, A. L., and Seshia, S. A.
(2019). Scenic: A language for scenario specifica-
tion and scene generation. In Proceedings of the 40th
ACM SIGPLAN Conference on Programming Lan-
guage Design and Implementation, PLDI 2019, page
63–78, New York, NY, USA. Association for Comput-
ing Machinery.
Fremont, D. J., Kim, E., Pant, Y. V., Seshia, S. A., Acharya,
A., Bruso, X., Wells, P., Lemke, S., Lu, Q., and
Mehta, S. (2020). Formal scenario-based testing of
autonomous vehicles: From simulation to the real
world. In 2020 IEEE 23rd International Conference
on Intelligent Transportation Systems (ITSC), pages
1–8.
Goodfellow, I., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A., and Ben-
gio, Y. (2014). Generative adversarial nets. Advances
in neural information processing systems, 27.
Hartjen, L., Philipp, R., Schuldt, F., Friedrich, B., and
Howar, F. (2019). Classification of driving maneuvers
in urban traffic for parametrization of test scenarios.
In 9. Tagung Automatisiertes Fahren.
Jiang, C., Qi, S., Zhu, Y., Huang, S., Lin, J., Yu, L.-F., Ter-
zopoulos, D., and Zhu, S.-C. (2018). Configurable 3d
scene synthesis and 2d image rendering with per-pixel
ground truth using stochastic grammars. International
Journal of Computer Vision, 126(9):920–941.
Khirodkar, R., Yoo, D., and Kitani, K. (2019). Domain ran-
domization for scene-specific car detection and pose
estimation. In 2019 IEEE Winter Conference on Ap-
plications of Computer Vision (WACV), pages 1932–
1940.
Menzel, T., Bagschik, G., and Maurer, M. (2018). Scenarios
for development, test and validation of automated ve-
hicles. In 2018 IEEE Intelligent Vehicles Symposium
(IV), pages 1821–1827. IEEE.
Roberts, G. O. (1996). Markov chain concepts related to
sampling algorithms. Markov chain Monte Carlo in
practice, 57:45–58.
Rossmann, J., Schluse, M., Schlette, C., Waspe, R.,
Van Impe, J., and Logist, F. (2013). A new approach
to 3d simulation technology as enabling technology
for erobotics. In 1st International Simulation Tools
Conference & EXPO, pages 39–46.
Sippl, C., Bock, F., Lauer, C., Heinz, A., Neumayer, T., and
German, R. (2019). Scenario-based systems engineer-
ing: An approach towards automated driving function
development. In 2019 IEEE International Systems
Conference (SysCon), pages 1–8.
Smith, A. F. and Roberts, G. O. (1993). Bayesian compu-
tation via the gibbs sampler and related markov chain
monte carlo methods. Journal of the Royal Statistical
Society: Series B (Methodological), 55(1):3–23.
Tobin, J., Fong, R., Ray, A., Schneider, J., Zaremba, W., and
Abbeel, P. (2017). Domain randomization for transfer-
ring deep neural networks from simulation to the real
world. In 2017 IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS), pages 23–30.
Ulbrich, S., Menzel, T., Reschka, A., Schuldt, F., and Mau-
rer, M. (2015). Defining and substantiating the terms
scene, situation, and scenario for automated driving.
In 2015 IEEE 18th International Conference on Intel-
ligent Transportation Systems, pages 982–988. IEEE.
Van den Meersche, K., Soetaert, K., and Van Oevelen, D.
(2009). xsample (): an r function for sampling lin-
ear inverse problems. Journal of Statistical Software,
30(Code Snippet 1).
Wachenfeld, W. and Winner, H. (2016). The release of
autonomous vehicles. In Autonomous driving, pages
425–449. Springer.
Wagner, S., Groh, K., Kuhbeck, T., Dorfel, M., and Knoll,
A. (2018). Using time-to-react based on naturalistic
traffic object behavior for scenario-based risk assess-
ment of automated driving. In 2018 IEEE Intelligent
Vehicles Symposium (IV), pages 1521–1528. IEEE.
Winner, H., Lemmer, K., Form, T., and Mazzega, J. (2019).
Pegasus—first steps for the safe introduction of auto-
mated driving. In Road Vehicle Automation 5, pages
185–195. Springer.
MODELSWARD 2022 - 10th International Conference on Model-Driven Engineering and Software Development
210
