
Automated Human Movement Segmentation by Means of Human Pose
Estimation in RGB-D Videos for Climbing Motion Analysis
Raul Beltr
´
an B.
a
, Julia Richter
b
and Ulrich Heinkel
c
Professorship Circuit and System Design, Chemnitz University of Technology,
Reichenhainer Straße 70, 09126 Chemnitz, Germany
Keywords:
Climbing Motion Analysis, Movement Segmentation, Human Pose Estimation, Video Analysis.
Abstract:
The individual movement characterization of the human body parts is a fundamental task for the study of dif-
ferent activities executed by a person. Changes in position, speed and frequency of the different limbs reveal
the kind of activity and allow us to estimate whether an action is well performed or not. Part of this character-
ization consists of establishing when the action begins and ends, but it is a difficult process when attempted by
purely optical means since the subject’s pose in the image must first be extracted before proceeding with the
movement variables identification. Human motion analysis has been approached in multiple studies through
methods ranging from stochastic to artificial intelligence prediction, and more recently the latest research has
been extended to the sport climbing employing the centre-of-mass analysis. In this paper, we present a method
to identify the beginning and end of the movements of human body parts, through the analysis of kinematic
variables obtained from RGB-D videos, with the aim of motion analysis in climbing. Application tests with
OpenPose, PoseNet and Vision are presented to determine the optimal framework for human pose estimation
in this sports scenario, and finally, the proposed method is validated to segment the movements of a climber
on the climbing wall.
1 INTRODUCTION
With the increasing accessibility to devices for
recording and analysing people and objects in the 3-D
space, through image processing and artificial intelli-
gence (AI), every day more products appear that pro-
vide us with real-time information about our activi-
ties. An example of this is the video processing tech-
nology in real-time applied to sport, which makes it
possible to give online feedback to the athletes by
simply recording exercise sequences on their smart-
phones and then analysing them on the spot using an
application. In this type of application, a fundamental
process consists of extracting the human figure, deter-
mining the pose, and finally characterizing the move-
ment. Each of these phases is a matter of research,
which has either been approached individually (Xi-
aohui et al., 2018; Khuangga and Widyantoro, 2018;
Zheng et al., 2020) or jointly using AI (Fan et al.,
2017; Cao et al., 2017; Papandreou et al., 2018).
a
https://orcid.org/0000-0001-6612-3212
b
https://orcid.org/0000-0001-7313-3013
c
https://orcid.org/0000-0002-0729-6030
Human Pose Estimation (HPE) is a trending solu-
tion that AI offers to determine the position and ori-
entation of a person’s body in a given image. While
there is already an acceptable level of precision in 2-D
pose estimation, in many scenarios, the 3-D case still
requires more work to produce accurate models with
data fusion techniques, which is a challenging task. In
this area, sport climbing draws attention not only be-
cause of the widespread use it has had in recent years,
but also due to the challenges it implies for the recog-
nition of human postures.
The characterization or classification of human
movement according to kinematic variables such as
displacement and distance, velocity and speed, accel-
eration, and time, requires segmenting the motion ob-
servation sequences into smaller components, called
motion primitives. It is a principal task to describe
or analyse the execution of human activities, to fa-
cilitate the identification, modelling and learning of
movement (Lin et al., 2016). The climbing action is
divided into phases, usually composed of movements,
in which these can be segmented. e.g. Firstly, one
hand reaches for a hold, then the feet are placed, and
finally, the climber stands up to grab the next grip
366
Beltrán B., R., Richter, J. and Heinkel, U.
Automated Human Movement Segmentation by Means of Human Pose Estimation in RGB-D Videos for Climbing Motion Analysis.
DOI: 10.5220/0010817300003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 5: VISAPP, pages
366-373
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

with the other hand. Then, it is especially important to
determine when each of these phases starts and ends
to analyse individual movements, adding that specific
movement errors can occur in each of these phases.
After the climber has reached the new hold and re-
placed the feet, for example, this very arm has to be
kept straight to save energy within the same phase
of the climbing action. To evaluate and determine if
there is error, the segments of the whole climbing se-
quence have to be obtained.
Our research has as its main objective the move-
ment segmentation for the hands, feet, and waist us-
ing the 3-D skeleton joints of a climber recorded in
an RGB-D video through an optical device. Thus, a
mechanism is provided to model individual climbing
movements using the estimated pose in 2-D images
and its projection in 3-D using the point cloud deliv-
ered by the device. Our contributions are included in
the first phases of the climbing analysis, namely in
the selection of a suitable HPE framework and the ap-
plication of techniques for segmentation of the move-
ment primitives.
The paper is structured as follows: Section 2
presents extant works in the research areas related to
the present document. Thereupon, Section 3 explains
the methods to carry out the data collection, model
construction, and information analysis. Next, in sec-
tion 4, the results are exposed and discussed. Finally,
conclusions of the overall work are presented and fu-
ture work in the climbing analysis is outlined.
2 RELATED WORKS
This paper focuses on the field of climbing motion
analysis and is linked to the segmentation of human
motion primitives. Recent work in these two research
areas is presented below.
2.1 Motion Primitives Segmentation
In extant studies, human motion and human posture
has been commonly modelled by means of dynamic
systems and approximations with stochastic methods
to carry out temporal and dimensional segmentation
of the body parts associated with the displacement
(Kuli
´
c et al., 2011). Other works in the same di-
rection as Meier et al. (2011) have reformulated the
problem from the perspective of trajectory recogni-
tion in parameterized libraries of motion primitives,
an approach that is valid for the study of specific lo-
comotion activities. With the rise of AI in the last
decade, projects of movement primitives segmenta-
tion have emerged (Lin et al., 2016; V
¨
ogele et al.,
2014), but as proposed by Lin et al. (2016), from
the definition of what a segment is to how the data
is collected, make each solution to the problem have
an application to specific requirements. These stud-
ies, like others (Jansen et al., 2019; Aoki et al., 2016),
have used inertial measurement unit (IMU) sensors
attached to the joints of the body to collect the posi-
tion and velocity data of the limbs, obtaining consis-
tent signals that facilitate the analysis. Cutting-edge
investigations (Zago et al., 2020; Colyer et al., 2018)
using marker-less sensors, have been facing problems
such as body parts occlusion and the quality of the
gathered data, requiring multiple sensors at different
viewpoints to improve data quality, or data virtualiza-
tion to predict unknown poses with predefined kine-
matic models. There are also investigations (McCay
et al., 2020) in this sense where the posture analy-
sis is carried out from RGB-D images, to train neural
networks and translate them into a classification prob-
lem.
2.2 Climbing Motion Analysis
In the field of sport climbing, there are recent studies
to analyse the trajectory of the climber’s centre-of-
mass (CoM) through optical devices, such as Richter
et al. (2020a), where information on the fluency,
force, and distance to the wall is acquired to pro-
vide the climber with information to prevent possi-
ble injuries from a therapeutic point of view. Richter
et al. (2020b) moreover provide a profound survey
on climbing motion analysis. Cha et al. (2015) anal-
yse postures and movements also employing optical
devices, but with an orientation to the construction
of 3-D graphic animations. Others like Seifert et al.
(2014), using IMUs attached to the climber body, at-
tempt the recognition of climbing patterns using clus-
ter analysis to process the position of the limbs and
waist of the subject. Nevertheless, these studies that
involve wearables are dedicated to laboratory analy-
sis, since they have the difficulty to be transferred to
applications of daily use due to the cost of the im-
plements (Jansen et al., 2019) and how cumbersome
these accessories can be for climbers.
3 METHODS
In this section we first introduce a segmentation con-
cept for our climbing scenario, after which we pro-
ceed with the explanation of the steps taken to collect,
process and analyse the information.
Automated Human Movement Segmentation by Means of Human Pose Estimation in RGB-D Videos for Climbing Motion Analysis
367
3.1 Segment Definition
As in other sports, climbing movements aim to reduce
effort and improve performance, seeking to solve a
task while saving effort. Climbing is an acyclic sport
with three phases: preparation, continue-reaching,
and stabilization, usually with a combination of
movements in a single phase (Winter, 2012). The pe-
riod in which each of these movements is executed is
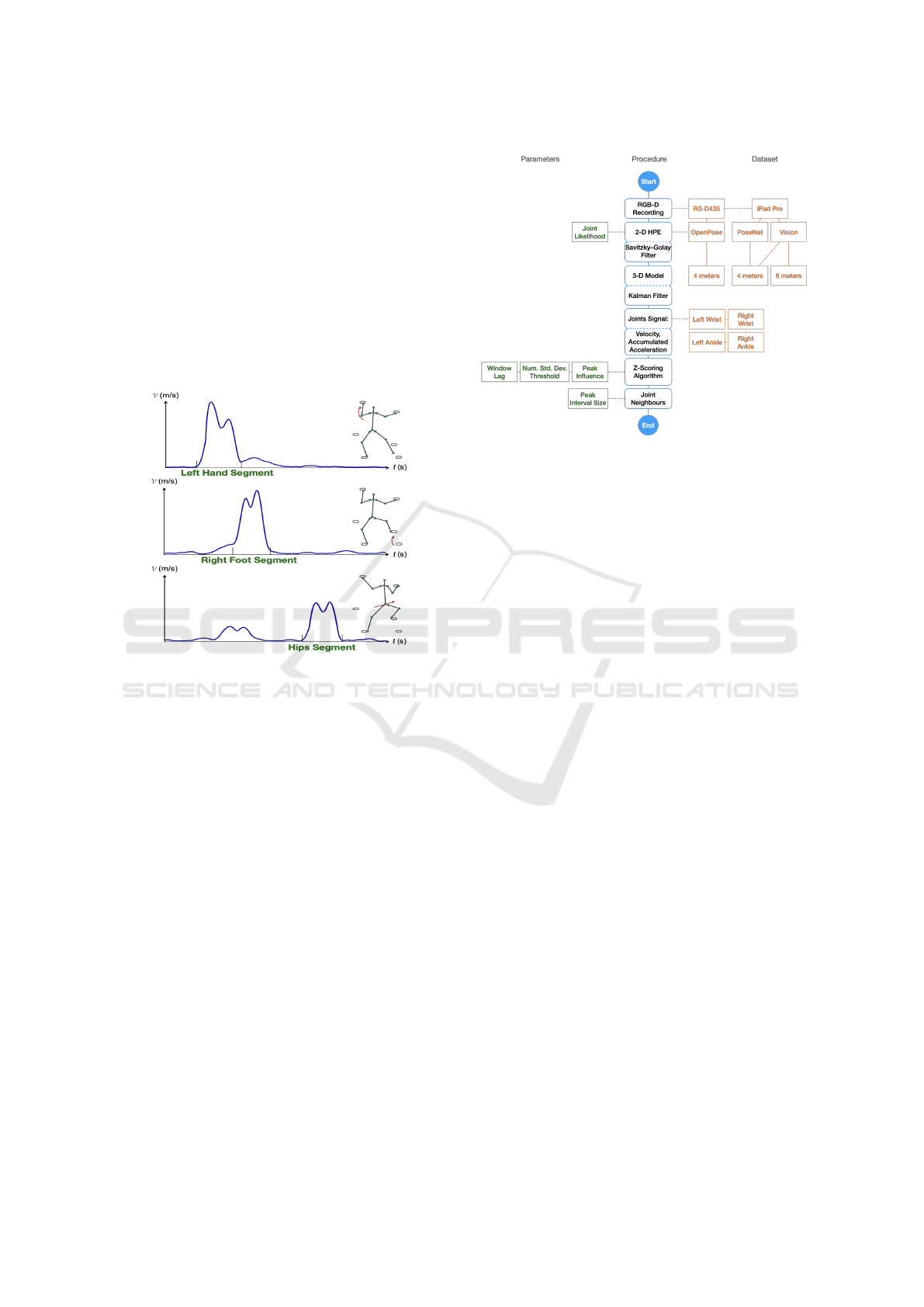
what we define here as a segment. Figure 1 shows an
example of a sequence of climber movements, where
the speed changes indicate when the climbing actions
begin and end.
Figure 1: Schemes of the temporal segmentation of climb-
ing movements.
For movement analysis, we took five target joints
from the skeleton data: the climber’s wrists and an-
kles, plus the hip. For each joint an independent dis-
crete signal was constructed with the measured veloc-
ity at each frame. Thus, the movement of one hand to
the next grip, the rearrangement of the feet or the hip’s
displacement when standing up on the supporting leg,
for example, can be identified as peaks in the speed
signal. Considering that in the obtained signal, detec-
tions of interest consist of several consecutive peaks,
the analysis must use the signal envelope or its cumu-
lative value to find the local maximums. To rule out
small peaks due to jittering in the skeleton joints lo-
calization, we decided to use the cumulative value of
the signal where sustained slopes can be seen when a
long movement is executed.
3.2 Movement Segmentation Procedure
Figure 2 depicts the overall process followed to
achieve the movement segmentation through a 3-D
optical device, which is described in detail in the fol-
lowing.
Figure 2: Block diagram of the movement segmentation al-
gorithm.
3.2.1 RGB-D Video Recording
Our study was conducted on RGB-D videos captured
with two different devices. Initially, an Intel Re-
alSense D435 camera was used, with which video
samples were taken at 4 m from the climbing wall
with a resolution of 848×480 pixels at 30 fps, obtain-
ing a density in the point cloud of one point per pixel.
Subsequently, an iPad Pro 12.9-inch 4th Generation
was used to record videos of 1440×1920 pixels at 60
fps, at 4 m and 6 m from the wall, with a density of
one point per each 8,62 and 6,12 pixels respectively.
The distances to the climbing wall depended on the
sensor used, considering that the entire wall should fit
within its angle of view.
3.2.2 2-D Human Pose Estimation
The pose detection in the RealSense (RS) videos was
carried out by means of OpenPose (Cao et al., 2019),
a real-time multi-person detection library capable of
jointly detecting human body, face, and foot key-
points. For the iPad case, the PoseNet (Papandreou
et al., 2018) framework was tested first with a Ma-
chine Learning (ML) model developed for iOS in
TensorFlow Lite ; however, better results were ob-
tained when using the Vision framework for HPE
built into the device SDK provided by Apple Inc.
In the skeleton model obtained, fluctuations be-
tween good and bad joint detections translate into
a high rate of jittering in the position of the recog-
nized body joints. In our work, we reduced the rate
of this jittering by applying an implementation of
the Savitzky-Golay filter algorithm (Savitzky and Go-
lay, 1964), whose principle is the calculation of local
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
368
polynomial regression to determine the new value of
each non-conforming point.
3.2.3 3-D Model Construction
The estimation of the third coordinate for the 3-D
skeleton joints was performed in the post-processing
phase, using the collected data from the device and
the Point Cloud Library (PCL).
The RS-D435 device includes an active infrared
(IR) stereo vision sensor to capture the depth of the
scene, producing point clouds in a modified Rosbag
file accessible through the camera’s SDK . In the
iPad’s case, the device uses a LiDAR scanner that per-
forms depth-sensing with the help of its pro cameras,
motion sensors, and the GPU, such that the more it
scans an area, the more details are resolved. The iOS
SDK allows communication through Shaders with the
GPU memory and thus to control the delivery den-
sity of the point cloud in each frame, to the detri-
ment of the available RAM; for this reason, a thresh-
old is introduced between the duration of the video
and the desired density of the point cloud. We choose
this threshold based on the distance to the climbing
wall, carrying out tests from 4 m and 6 m as shown in
Table 1.
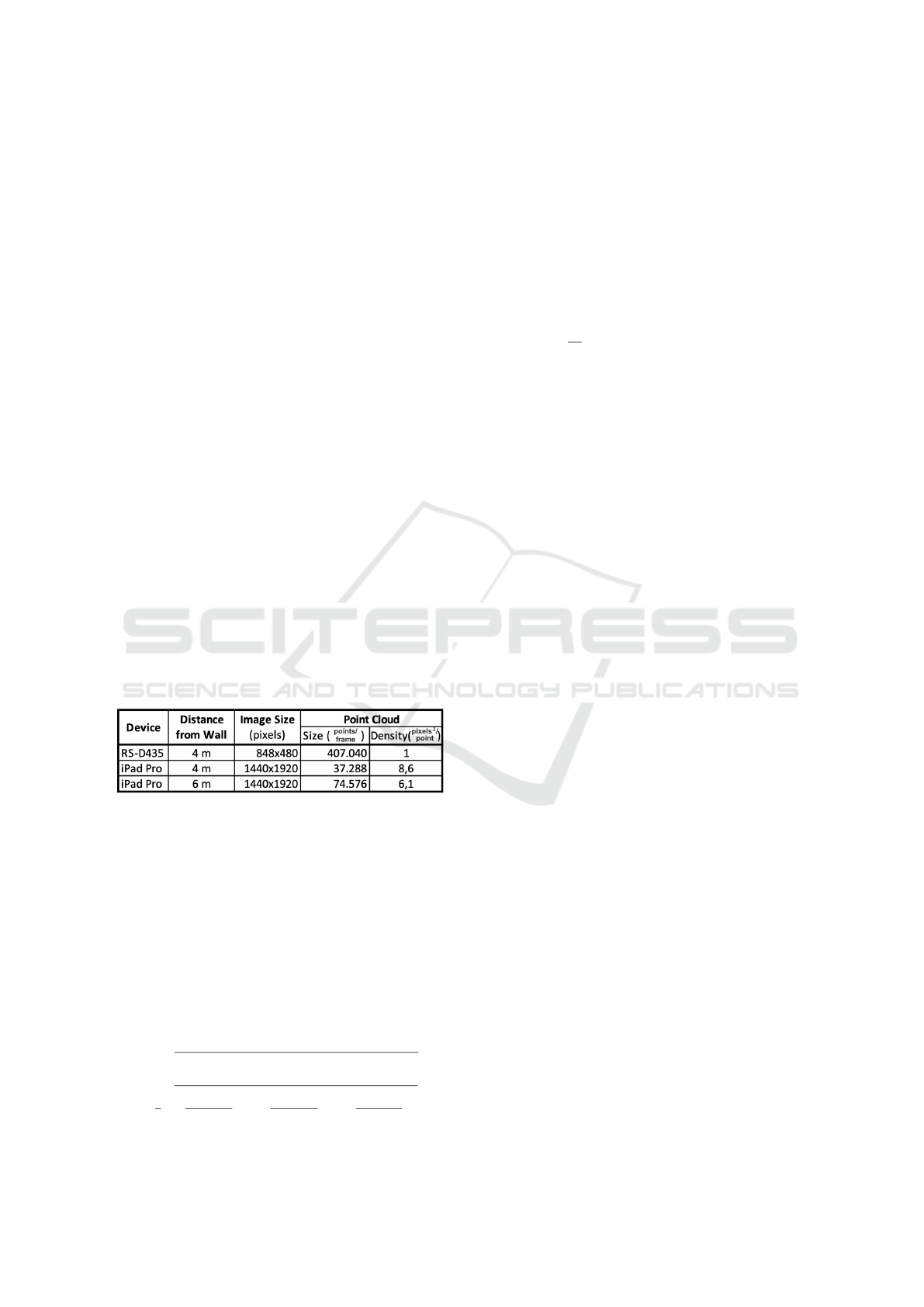
Table 1: Values for the suitable point cloud size. Low val-
ues for iPad come from the threshold between video length,
PCL persistence time, and available memory on the device;
having a maximum of 49.192 depth points with an individ-
ual confidence level.
Determining the depth of the body limbs presents
a problem when the point cloud density is low, then
the distance to the elbows, hands, knees, and feet of-
ten coincides with the climbing wall. As a solution,
we use the Kalman filter (Kalman, 1960) to predict
the correct distance and thus reduce the jittering pro-
duced in the z-coordinate of the skeleton joints.
3.2.4 Joint Signal Construction
For the analysis, the joint’s position along the entire
climbing route is recorded independently of the other
joints. Hence, the velocity and acceleration at the i-th
frame of the video are given by:
v
i
= f
q
(x
i
− x
i−1
)
2
+ (y
i
− y
i−1
)
2
+ (z
i
− z
i−1
)
2
(1)
a
i
=
1
2
v
u
u
t
v
2
xi
− v
2
xi−1
x
i
− x
i−1
!
2
+
v
2
yi
− v
2
yi−1
y
i
− y
i−1
!
2
+
v
2
zi
− v
2
zi−1
z
i
− z
i−1
!
2
(2)
where f is the sampling frequency depending on the
recording device, 30 Hz or 60 Hz. The series of n val-
ues for all frames of the video sequence constitute the
discrete velocity and acceleration signals that model
the movement of the climber’s limbs. As shown in
equation 3, to reduce the noise influence and facilitate
the detection of the joints state, a low-pass moving
average filter was applied on v, with a period of f /3
samples.
V [i] =
1
M
M−1
∑
j=1
v[i + j], with M = f /3 (3)
As preconditions were defined: i) The start and
end of a motion segment is the moment when the
climber is at rest, the hands gripping the holds and
the feet firm on the grips. ii) The minimum window
for a detection movement is 1/3 s ( f /3), considering
that below this limit, climbing movements occur be-
tween close grips and are too short for our analysis.
iii) The study is conducted on the climber’s extremi-
ties and their CoM, so the joints involved are the sub-
ject’s wrists, ankles and hips. iv) In the 2-D case, the
z-coordinate is zero.
3.2.5 The Z-Scoring Algorithm
The peaks in the signal were located employing an
implementation of the z-score algorithm, a procedure
based on the principle of dispersion, which identifies
as local maxima those data points that are within a
certain number of standard deviations (σ) from the
mean (µ) of a moving window. This procedure uses
three parameters, the window lag, the threshold or
number of σ’s at which the peak is marked, and the
influence of the peak on the µ and σ. To illustrate the
technique employed, Figure 3 shows in dark blue the
velocity signal related to the left wrist of a climber, as
schematized in Figure 1. The algorithm identifies the
movements as peaks in the velocity signal, so there
are four detections around frame numbers 160, 264,
656 and 852. This method detects significant vari-
ations in the signal, leaving out those sudden peaks
considered as noise, such as occurs in the area of
frame 372.
3.2.6 Joint Movement Intervals
Through testing, we determined that for long or sus-
tained climbing movements, the cumulative accelera-
tion works better to identify the movement peaks than
the flat velocity. Figure 4 shows the cumulative accel-
eration of the wrist joint analysed in figure 3, there the
four significant movements detected along the signal
were transformed into slopes when we had long and
Automated Human Movement Segmentation by Means of Human Pose Estimation in RGB-D Videos for Climbing Motion Analysis
369
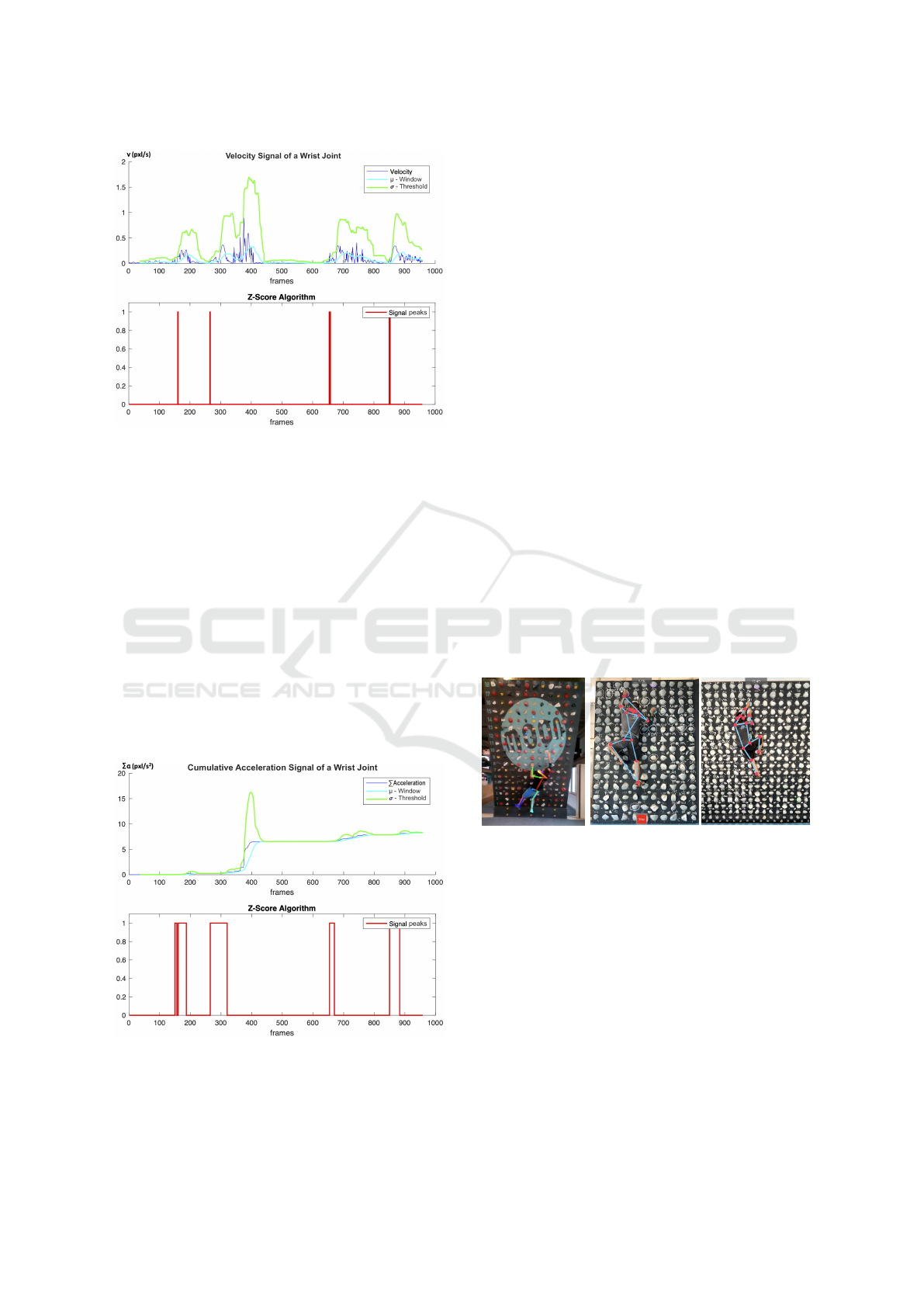
Figure 3: Application of the z-score algorithm on the wrist
velocity signal with lag window 35 and σ threshold 6.
sustained movements, while the relatively short and
fast ones were interpreted as steep slopes. This is the
case for the limbs when they are occluded and the un-
certainty in position is reflected as jittering in the sig-
nal, as both images show around frame 372. Frame
intervals were created around the peaks obtained in
the accumulated acceleration signal, and only those
peaks whose intervals intersect adjacent ones were
taken. This process provided us with a series of frame
intervals where the joint showed consistent changes
in velocity, i.e. a starting point with increasing accel-
eration and an end point with the decreasing magni-
tude. These local maxima indicate when the limb of
the body is in motion and are therefore directly related
to the segmentation of the movement sought.
Figure 4: Signal analysis in 2-D of a wrist joint obtained
from an 16-second video sequence at 60 fps, and application
of the z-score algorithm to cumulative acceleration.
4 RESULTS AND DISCUSSION
This section presents an evaluation of the quality of
data delivered by the skeleton extraction algorithms
used, followed by a contrast of results using pure 2-D
images against the complement with 3-D information.
4.1 HPE Framework Selection
In images recorded with the RS-D435 camera, Open-
Pose results are notably good in most positions taken
by the climber. The skeleton extraction for peo-
ple from behind is precise and in the climbing sce-
nario, it is possible to detect particular climber poses
when the occlusion of the extremities is not very pro-
nounced. In addition, OpenPose offers the location of
the hands and feet, which is important when it comes
to analysing how effective the climber’s pose is be-
fore making a move (Kosmalla et al., 2020). Never-
theless, the algorithm has problems by detecting false
hands and feet positions when they are confused with
shapes of the holds on the climbing wall, especially
when lighting conditions or the colour of the grips
make it difficult to differentiate them from body parts,
see Figure 5a. It is relevant to mention here that Open-
Pose has a licence restriction that strictly prohibits its
use for sports for commercial purposes (CMU, 2019);
additionally, the annual cost of this licence makes it
awkward to implement outside the research field.
(a)
(b)
(c)
Figure 5: Pose estimation by three different frameworks:
(a) Hold misidentified as a right hand by OpenPose in an
RS image. (b) Twisted skeleton by OpenPose trying to fit
the subject in front. (c) Correct skeleton detection by Vision
at 6 m from a wall tilted at 25°.
For the sequences recorded with iPad, PoseNet
allowed the extraction of the skeleton with an accu-
racy of up to 53 % in each video. Index calculated
with the number of false orientations of the skeleton,
in 12 videos of 19,8 s on average at 60 fps (14.270
images approximately), plus the number of duplicate
joints as a result of partial twists of the skeleton de-
tected, see Figure 5b. This does not include false de-
tections of limbs hidden by the climber’s body, which
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
370
are difficult to count algorithmically, hence the per-
centage of good detections could decrease as a func-
tion of the time the climber covers a limb. The prob-
lem with PoseNet lies in the Microsoft COCO key-
point dataset (Lin et al., 2014) used to train the al-
gorithm , where the content does not provide enough
knowledge for the algorithm to recognize climbers on
a climbing wall. After correcting the body limbs’
laterality through heuristic rules the result reached a
67 % of effectiveness in the detection of the poses.
Tests with the Vision framework were successful
with 93 % effectiveness, obtaining the skeleton with-
out the need for orientation corrections as Figure 5c
shows, and applying the same metric used to evaluate
PoseNet as shown in Table 2. Detection difficulties
occur when the subject occupies less than 1/3 of the
overall image height, as recommended by the docu-
mentation. The detections are then confused with the
adjacent holds just like OpenPose. A curious situation
happens when a climber has hair styled like a pony-
tail, then the algorithm detects this kind of hair-knot
as if it were the subject’s nose and tries to rotate the
skeleton.
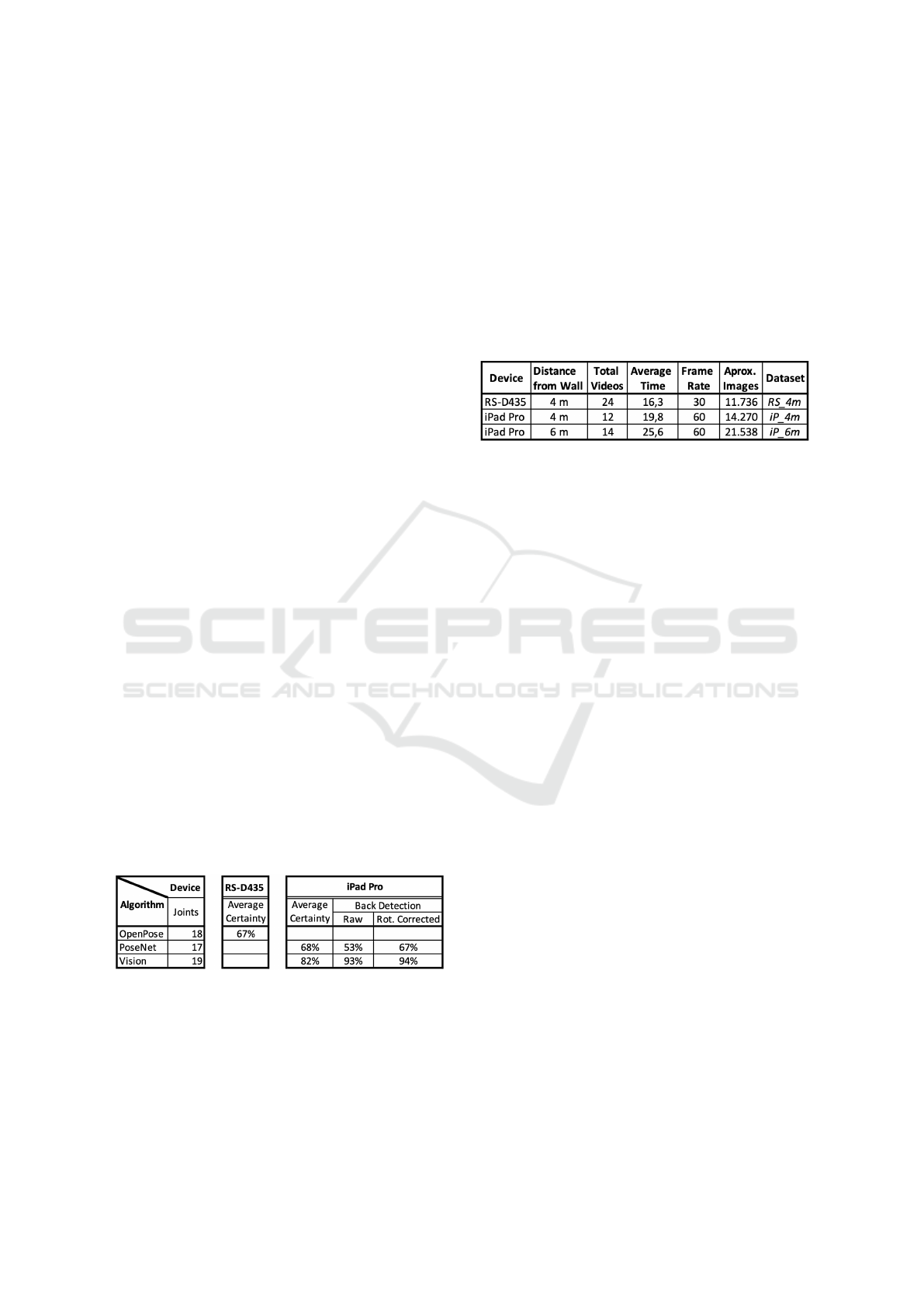
Regardless of the algorithm used for the pose es-
timation, they all provide a likelihood in the detec-
tion of each skeleton joint. By averaging the individ-
ual probabilities of all the detected joints per frame,
to assign a global certainty to the climber’s skeleton,
it could be observed that, in the case of OpenPose,
the detections are generally made with a certainty of
67 %. While with PoseNet and Vision this value is
68 % and 82 % respectively. Although this calcu-
lation is not conclusive, it does make it possible to
identify the certainty as an inherent parameter of the
algorithm employed, which cannot be used as cross-
sectionally indicator.
Table 2: Effectiveness comparison of the three tested pose
detection frameworks. OpenPose ran only on the RealSense
device without rotation problem, while PoseNet and Vision
were able to run on the iPad.
4.2 Algorithm Evaluation
The climber’s movement segmentation algorithm was
evaluated in six scenarios, which are derived from the
use of three groups of videos analysed in 2-D and
3-D, see Table 3. The first video group made up of
24 recordings created with a RealSense D435 cam-
era, 4 m away from the climbing wall, for which HPE
was done using the OpenPose framework. The sec-
ond and third video groups were recorded on an iPad
Pro 4th Generation, at 4 m and 6 m from the climb-
ing wall respectively, using the device’s framework
for HPE. On the other hand, the six parameters re-
quired for the algorithm execution were calculated in
advance for each scenario before executing the evalu-
ation.
Table 3: Specifications of the three datasets used to tuning
the segmentation algorithm.
The ground truth for the evaluation of the algo-
rithm was constructed manually by observing each
of the climber’s movements in the different sets of
videos, taking time measurements for the actual seg-
ments where a movement of each limb was observed.
To classify True Positives, an intersection of at least
70 % between the interval lengths of the detected and
the expected segment was considered; otherwise, it
was treated as False Negative.
In the video group of the RS-D435 camera, both
in the 2-D and in the 3-D cases, the skeleton jit-
tering could be significantly reduced using the Sav-
itzky–Golay filter. Relying only on those skeleton
nodes whose likelihood was greater than 65 % and
76 %, respectively. Given that the point cloud density
was higher there, the calculation of the z-coordinate
for the joints presented less abrupt variations. Thus,
as shown in Figure 6, the detections of the movement
of the climber’s limbs, in both scenarios remained
similar. However, rapid movements between adjacent
holds were discarded by the algorithm. It may be at-
tributed to the fact that they occurred within the slid-
ing window of the z-scoring algorithm, within time
lower than 1/3 s, or due to no intersections of the 10-
frame interval around the detected peak were found.
In general, the detections were made with a proba-
bility of 73,74 % in 2-D and 69,51 % in 3-D, where
part of the fails can be attributed to the fact that many
skeleton joints below the certainty threshold were dis-
carded to avoid signals from other doubtful nodes.
For the iPad videos, the results differed notably
between the 2-D and 3-D cases. On the one hand, in
the 2-D detections, the jittering presented in the skele-
ton joints positions was not reduced as much as ex-
pected. It is due to the Vision algorithm producing
high certainty values for the detected joints so that
even invalid positions cannot be discarded. Despite
Automated Human Movement Segmentation by Means of Human Pose Estimation in RGB-D Videos for Climbing Motion Analysis
371
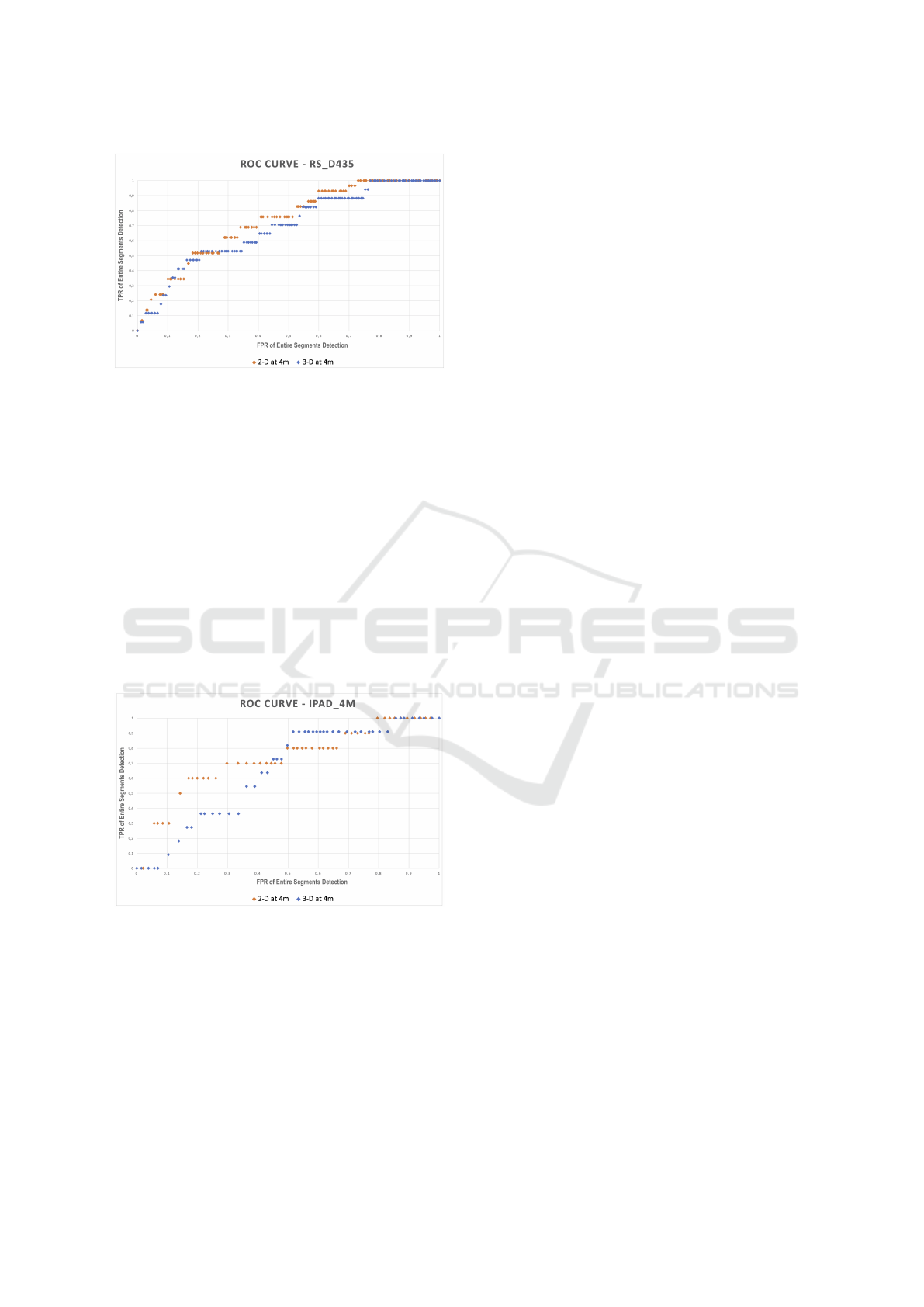
Figure 6: ROC curve comparison of the RS-D435 videos
segmented in 2-D and 3-D.
this, we obtained a 74,16 % of good detections with
a medium rate of false positives for videos recorded
at 4 m from the wall, see Figure 7. That was not the
case when it was recorded 6 m from the wall, where
good detections decreased to 67,59 % and false posi-
tives increased with it. On the other hand, 3-D detec-
tions showed considerable variations in the expected
results. The z-coordinate calculated for the joints ex-
hibited a high rate of jittering, which produced many
spikes in the speed signal. For now, this presents a
technical restriction in our research, since the density
of the point cloud depends on the physical memory of
the device and the duration of the recorded sequence.
However, the results for 4 m and 6 m were detections
with 65,5 % and 59,56 % effectiveness.
Figure 7: ROC curve for iPad Pro data sets recorded at 4 m
from the wall, showing a comparison between 2-D and 3-D.
5 CONCLUSIONS AND FUTURE
WORK
The objective of the climber’s movement segmenta-
tion by analysing changes in speed and acceleration
of their limbs was met according to the expectations.
The study showed that currently there are algorithms
skilled enough to detect various poses of climbers in
action, such as OpenPose and Vision. It was pos-
sible to prove that the cumulative acceleration met-
ric is valid for detecting the peaks of the climber’s
limbs movement. Although, there is still a significant
problem to be solved, which is the sudden change of
position of the hidden limbs by the climber’s body,
where a viable solution is to retrain one of the evalu-
ated HPE frameworks by including a proper climbing
image dataset. The latter is feasible using PoseNet,
considering that Vision is a private framework from
Apple Inc.
Even through the results of the automatic move-
ment segmentation, in both 2-D and 3-D scenarios,
were more consistent with the observations in the
videos recorded with RS-435 using OpenPose, the
quality of the video recorded with iPad and its Vision
framework can not be discarded. Poor results at 6 m
could be expected as the iOS documentation recom-
mends 5,5 m maximum from the object, but it helped
us in our project to test the reach of the device’s tech-
nology. Considering the OpenPose licensing restric-
tions on the one hand, and the versatility of the iPad
hardware and software on the other, this device is a
suitable tool to continue our research. However, we
are aware that Vision can only be used within the Ap-
ple Inc. devices environment, so its utilization limits
the use of the applications.
The results presented above allow us to continue
our research to evaluate the execution of technique
in sport climbing, considering the relationships be-
tween posture, momentum and the effectiveness of
the climber’s movements.
ACKNOWLEDGEMENTS
This research was funded by the “Zentrales Inno-
vationsprogramm Mittelstand (ZIM)” by the Federal
Ministry for Economic Affairs and Energy (BMWi)
with the project ID ZF4095809DH9.
REFERENCES
Aoki, T., Lin, J. F.-S., Kuli
´
c, D., and Venture, G. (2016).
Segmentation of human upper body movement us-
ing multiple imu sensors. In 2016 38th Annual In-
ternational Conference of the IEEE Engineering in
Medicine and Biology Society (EMBC), pages 3163–
3166. IEEE.
Cao, Z., Hidalgo, G., Simon, T., Wei, S.-E., and Sheikh,
Y. (2019). OpenPose: realtime multi-person 2d pose
estimation using part affinity fields. In IEEE trans-
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
372

actions on pattern analysis and machine intelligence,
volume 43, pages 172–186. IEEE.
Cao, Z., Simon, T., Wei, S.-E., and Sheikh, Y. (2017). Real-
time multi-person 2d pose estimation using part affin-
ity fields. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 7291–
7299. IEEE.
Cha, K., Lee, E.-Y., Heo, M.-H., Shin, K.-C., Son, J., and
Kim, D. (2015). Analysis of climbing postures and
movements in sport climbing for realistic 3d climbing
animations. In Procedia Engineering, volume 112,
pages 52–57. Elsevier.
CMU (2019). Carnegie Mellon University: Open-
Pose - non-exclusive commercial license.
https://cmu.flintbox.com/technologies/b820c21d-
8443-4aa2-a49f-8919d93a8740, visisted on
24/09/2021.
Colyer, S. L., Evans, M., Cosker, D. P., and Salo, A. I.
(2018). A review of the evolution of vision-based mo-
tion analysis and the integration of advanced computer
vision methods towards developing a markerless sys-
tem. In Sports medicine-open, volume 4, pages 1–15.
SpringerOpen.
Fan, K., Wang, P., Hu, Y., and Dou, B. (2017). Fall de-
tection via human posture representation and support
vector machine. In International journal of distributed
sensor networks, volume 13. SAGE Publications Sage
UK: London, England.
Jansen, W., Laurijssen, D., Daems, W., and Steckel, J.
(2019). Automatic calibration of a six-degrees-of-
freedom pose estimation system. In IEEE Sensors
Journal, volume 19, pages 8824–8831. IEEE.
Kalman, R. E. (1960). A new approach to linear fil-
tering and prediction problems. In Transactions of
the ASME–Journal of Basic Engineering, volume 82,
pages 35–45.
Khuangga, M. C. and Widyantoro, D. H. (2018). Human
identification using human body features extraction.
In 2018 International Conference on Advanced Com-
puter Science and Information Systems (ICACSIS),
pages 397–402. IEEE.
Kosmalla, F., Zenner, A., Tasch, C., Daiber, F., and Kr
¨
uger,
A. (2020). The importance of virtual hands and feet
for virtual reality climbing. In Extended Abstracts of
the 2020 CHI Conference on Human Factors in Com-
puting Systems, pages 1–8. Association for Comput-
ing Machinery.
Kuli
´
c, D., Kragic, D., and Kr
¨
uger, V. (2011). Learning ac-
tion primitives. Visual analysis of humans, pages 333–
353. Springer.
Lin, J. F.-S., Karg, M., and Kuli
´
c, D. (2016). Movement
primitive segmentation for human motion modeling:
A framework for analysis. In IEEE Transactions on
Human-Machine Systems, volume 46, pages 325–339.
IEEE.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft coco: Common objects in context. In Euro-
pean conference on computer vision, pages 740–755.
Springer.
McCay, K. D., Ho, E. S., Shum, H. P., Fehringer, G., Mar-
croft, C., and Embleton, N. D. (2020). Abnormal in-
fant movements classification with deep learning on
pose-based features. In IEEE Access, volume 8, pages
51582–51592. IEEE.
Meier, F., Theodorou, E., Stulp, F., and Schaal, S. (2011).
Movement segmentation using a primitive library. In
2011 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems, pages 3407–3412. IEEE.
Papandreou, G., Zhu, T., Chen, L.-c., Gidaris, S., Tompson,
J., and Murphy, K. (2018). PersonLab: Person pose
estimation and instance segmentation with a bottom-
up, part-based, geometric embedding model.
Richter, J., Beltr
´
an B., R., and Heinkel, U. (2020a).
Camera-based climbing analysis for a therapeutic
training system. In Current Directions in Biomedical
Engineering, volume 6. De Gruyter.
Richter, J., Beltr
´
an B., R., K
¨
ostermeyer, G., and Heinkel,
U. (2020b). Human climbing and bouldering motion
analysis: A survey on sensors, motion capture, anal-
ysis algorithms, recent advances and applications. In
VISIGRAPP (5: VISAPP), pages 751–758.
Savitzky, A. and Golay, M. J. (1964). Smoothing and dif-
ferentiation of data by simplified least squares pro-
cedures. In Analytical chemistry, volume 36, pages
1627–1639. ACS Publications.
Seifert, L., Dovgalecs, V., Boulanger, J., Orth, D., H
´
erault,
R., and Davids, K. (2014). Full-body movement pat-
tern recognition in climbing. In Sports Technology,
volume 7, pages 166–173. Taylor & Francis.
V
¨
ogele, A., Kr
¨
uger, B., and Klein, R. (2014). Efficient un-
supervised temporal segmentation of human motion.
acm siggraph. In Eurographics Symposium on Com-
puter Animation.
Winter, S. (2012). Klettern & Bouldern: Kletter-
und Sicherungstechnik f
¨
ur Einsteiger, pages 90–91.
Rother Bergverlag.
Xiaohui, T., Xiaoyu, P., Liwen, L., and Qing, X. (2018).
Automatic human body feature extraction and per-
sonal size measurement. In Journal of Visual Lan-
guages & Computing, volume 47, pages 9–18. Else-
vier.
Zago, M., Luzzago, M., Marangoni, T., De Cecco, M., Tara-
bini, M., and Galli, M. (2020). 3d tracking of human
motion using visual skeletonization and stereoscopic
vision. In Frontiers in bioengineering and biotechnol-
ogy, volume 8, page 181. Frontiers.
Zheng, C., Wu, W., Yang, T., Zhu, S., Chen, C., Liu, R.,
Shen, J., Kehtarnavaz, N., and Shah, M. (2020). Deep
learning-based human pose estimation: A survey.
Automated Human Movement Segmentation by Means of Human Pose Estimation in RGB-D Videos for Climbing Motion Analysis
373
