
Towards Cargo Wagons Brake Health Scoring through Image Processing
Andres Felipe Posada-Moreno
1 a
, Thomas Otte
2 b
, Damir Pehar
3
, Marc Haßler
3 c
,
Holger Bartels
3
, Anas Abdelrazeq
2
and Frank Hees
2
1
Institute for Data Science in Mechanical Engineering (DSME), RWTH Aachen University, Germany
2
Institute for Information Management in Mechanical Engineering (IMA), RWTH Aachen University, Germany
3
Deutsche Bahn (DB) Cargo AG, Frankfurt am Main, Germany
fi
{Marc.Hassler, Holger.Ho.Bartels, Damir.Pehar}@deutschebahn.com
Keywords:
Rail Transport, Health Estimation, Neural Networks.
Abstract:
The increase of integrated logistics is generating the progressive integration of rail transport systems on a
global scale. This raises the challenge of the safe and compliant operation of an increasing number of assets.
Within this context, inspection of in-service cargo wagons becomes increasingly important. Among the wagon
components, the brake pads are essential and must be constantly inspected and timely changed before any fail-
ure. This publication presents a novel system for the automated scoring of cargo wagon brakes through image
processing and deep learning algorithms. The main goal of this system is to provide insightful information
which can improve the observability of assets, as well as enable augmented decision-making in maintenance
inspection processes. Through this work, a four-step novel approach is described. First, an image acquisition
system was developed. Then, an object detection model is used to extract the important cargo wagon compo-
nents. Next, images containing the extracted brakes are analyzed to extract the most relevant keypoints of the
brakes. Finally, the ratio between the distances of multiple keypoints is used to score each brake and provide
insightful information regarding their health. After implementation, the proposed approach is tested and the
resulting scores are explored.
1 INTRODUCTION
With an increasing demand for integrated logistics in
a globalized world, rail transport networks progres-
sively converge. This extends to the physical con-
nectivity of railway infrastructure, the coherence and
interoperability of existing systems, as well as nor-
mative requirements and operational standards. As
a consequence, previously isolated railway systems,
are being integrated, multiplying the complexity of
rail transport by the number of the integrated assets,
their maintenance, and the information flows related
to their operations.
A global example of these dynamics can be ob-
served with the growth of the International Union
of Railways (UIC), which, to date, is composed of
204 member organizations from all around the globe
(Union Internationale des Chemins de fer, 2021). As
a
https://orcid.org/0000-0003-3751-0680
b
https://orcid.org/0000-0002-4227-8938
c
https://orcid.org/0000-0002-1545-1416
part of their current technical priorities, the UIC has
listed the usage of digital technologies and the lever-
aging of data to increase large systems’ observability
(Union Internationale des Chemins de fer, 2020).
At the same time, global biosecurity issues have
highlighted the need for resilient operations and main-
tenance processes, which can adjust to limited per-
sonnel mobility situations. In this context, digitaliza-
tion and the usage of artificial intelligence can con-
tribute to more robust asset management in uncer-
tain conditions. Similarly, the UIC has included the
topics of “asset management and predictive mainte-
nance” and “railway automation through artificial in-
telligence and robotics” as part of their agenda (Union
Internationale des Chemins de fer, 2020).
Within this context, the German rail freight trans-
port company DB Cargo AG, operates a fleet com-
posed of over 2500 locomotives and 90000 cargo
wagons (DB Cargo AG, 2021). Adding to asset di-
versity, this fleet contains more than 190 different
cargo wagon types, which are operated, inspected,
and maintained continuously. As a result, opportu-
Posada-Moreno, A., Otte, T., Pehar, D., Haßler, M., Bartels, H., Abdelrazeq, A. and Hees, F.
Towards Cargo Wagons Brake Health Scoring through Image Processing.
DOI: 10.5220/0010824300003122
In Proceedings of the 11th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2022), pages 423-431
ISBN: 978-989-758-549-4; ISSN: 2184-4313
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
423

nities for digitalization not only contribute to the gen-
eral objectives of the UIC, but are also directly trans-
lated into operational advantages of UIC members
such as large rail transport companies.
Thus, the need arises for maintaining compliance
with the General Contract of Use for Wagons from
the UIC and the GCU bureau (GCU Bureau, 2021) at
scale, and with more robust processes. To improve
the inspection and maintenance processes required by
the mentioned contract, railway companies have in-
vested in digitalization technologies. More specifi-
cally, companies and researchers have been working
on using state of the art artificial intelligence tech-
niques designed to assess the individual integrity of
the components of cargo wagons (Zhang et al., 2018;
Rocha et al., 2018; Liu et al., 2016; Sun et al., 2017;
Otte et al., 2020), railways (Zhang et al., 2021a; Rong
et al., 2016; Shang et al., 2018) and other related in-
frastructure (Zhang et al., 2021b; Li et al., 2014; Peng
et al., 2020). Through this goal, researchers and rail-
way companies have joined hands in the development
of multiple applications.
In recent years, multiple publications have intro-
duced inspection applications for railway infrastruc-
ture (Zhang et al., 2021a; Rong et al., 2016; Shang
et al., 2018), as well as in-service inspection systems
for high-priority components in cargo wagons (Zhang
et al., 2018; Rocha et al., 2018; Liu et al., 2016; Sun
et al., 2017). These systems have explored classi-
cal techniques such as template matching (Ningning
et al., 2016), and deep neural networks based tech-
niques for recognition and inspection (Rocha et al.,
2018) showing different levels of performance in con-
trolled conditions and real-world applications.
The major challenges observed through the work
of previous researchers can be summarized into two
main topics. First, the usage of highly noisy data re-
sulting from real-world conditions affects any trained
algorithm. This concern arises from light conditions
in varied environmental scenarios, asset degradation,
and artifacts created through data acquisition pro-
cesses. Second, the limitations of available sensors
for post-hoc solutions make data acquisition cumber-
some or impractical in real-world settings. This is the
inherent practical restriction of having to implement
a scalable inspection system, which adjusts and does
not modify the normal operations of the cargo rail-
way transport (post-hoc). This requirement is often
the main concern on the implementation of new in-
spection systems, as any modification of existing in-
frastructure entails compliance risks as well as expen-
sive downtime of operations.
In this context, the current work proposes an
automatic system for cargo wagon brake scoring,
which enables augmented decision-making processes
regarding their health and the need for maintenance.
To the best of the author’s knowledge, the proposed
system is a novel approach for the health scoring of
cargo wagon brakes in the scientific and industrial
community. The proposed system consists of four
steps; (a) an image acquisition system; (b) an object
detection model; (c) a keypoint extraction model; and
(d) a brake scoring module.
The proposed approach and the necessary context
will be presented as follows. First, other approaches
related to cargo wagon and railway inspection will be
introduced. Then, the proposed system and each one
of its components will be described. Next, the results
of the implementation of the system will be reported.
Finally, the conclusions of the obtained results and the
planned future work will be discussed.
2 RELATED WORK
Computer vision systems for process support in rail-
way transport have been a focus of research for the
last decade. From the various applications that have
been previously explored, four main topics are high-
lighted. First, the inspection of critical infrastructure
during their operations (Zhang et al., 2021a). Second,
the identification of assets, based on the recognition
of their wagon number (UIC ID) (Xiucai and Gongli,
2020). Third, the inspection of the cargo contained
in cargo wagons through x-rays and deep learning
(Rogers et al., 2017). Last, the inspection and iden-
tification of faulty components in cargo wagons as a
mean to assist maintenance processes (Zhang et al.,
2021b). Although this work leans heavily towards
the last topic, other applications and approaches are
highly related to sensors and models that can be used
in the context of railway maintenance.
The inspection of critical infrastructure has fo-
cused on the detection of defects on rails. More
specifically, rail surface inspection has been proposed
through the usage of classical computer vision meth-
ods such as SVN-HOG (Gavai et al., 2019), as well
as multiple types of neural networks for object de-
tection and classification (Zhang et al., 2021a; Shang
et al., 2018). Similarly, methods have been explored
for the detection of related components such as tie
plates (Li et al., 2014), hexagonal nuts in railway fas-
teners (Peng et al., 2020), and bondwires (Gavai et al.,
2019). In these cases, a custom inspection vehicle has
been used to acquire the rail images (Li et al., 2014).
On the subfield of cargo inspection, researchers
have explored the usage of x-ray based image acqui-
sition systems for inspection of illegal loads as well
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
424

as cargo manifest verification. The first tackled is-
sue is the acquisition of the x-ray images and the
detection of the transported goods inside containers
(Rogers et al., 2015). Afterward, multiple deep learn-
ing approaches have been developed for the detec-
tion of specific contraband objects (e.g. concealed
cars) (Jaccard et al., 2016). One major issue related
to these techniques is the lack of available data. In
these cases, researchers have proposed the artificial
creation of datasets based on mock-ups (Kolokytha
et al., 2018) or synthetic generation of images based
on CAD files (Visser et al., 2016). In consequence, it
has also been proposed to verify transport manifests
through the usage of the same detection techniques
(Tuszynski et al., 2013).
Identification is one of the most important steps in
the inspection process of an asset, either in-service or
through the maintenance process. In this regard, re-
searchers have used the required UIC ID of the cargo
wagons as a direct identifier. Early techniques used
image morphological operations and template match-
ing to isolate and extract the wagon ID (Ningning
et al., 2016). Afterward, hybrid approaches exploited
the visual characteristics of white paint by extracting
regions through MSER before using an OCR algo-
rithm to interpret the painted characters (Xiang et al.,
2016). The latest methods propose the usage of deep
learning techniques to directly extract and interpret
the UIC ID characters from side views of the cargo
wagons (Xiucai and Gongli, 2020; Liu et al., 2019).
The inspection of cargo wagons has been explored
through the analysis of each of their critical compo-
nents. Initial approaches using template matching fo-
cused on the inspection of locomotive pantographs
(Hamey et al., 2007). Similarly, approaches using
other types of descriptors such as GLCM or HOG,
combined with SVN for the classification of boogey
block keys (Zhou et al., 2018) and locomotive speed
sensors (Li et al., 2019) have been found. Aside from
classical approaches, deep learning algorithms have
proven to be the preferred approach for the inspec-
tion of single components such as bogie pads (Rocha
et al., 2018) and valves (Pahwa et al., 2019). Simi-
larly, frameworks for the detection and classification
of multiple structural components have also been pro-
posed as a unified approach for this challenge (Zhang
et al., 2018; Posada Moreno et al., 2020).
Within the acquisition systems proposed in the
literature, the most common ones are the station-
ary CCD cameras in railway stations (Hamey et al.,
2007), the lateral high-speed cameras alongside rail-
ways (Zhang et al., 2020), and a line sensor camera
bridges (Posada Moreno et al., 2020). Acquisition
systems have shown illumination pollution and per-
spective variances. In perspective, the CCD approach
has the limitations of working with slowly approach-
ing locomotives. The high-speed cameras present a
single lower perspective of the wagons, which limits
the analysis to the inferior parts of the vehicles. Fi-
nally, the camera bridges captures a good perspective
of the wagons, but also lead to a lateral elongation
caused by their linear scanning cameras.
The proposed approach builds on previous
paradigms to tackle the issue of brake inspection.
Here, the brakes are not only detected for binary clas-
sification, but are scored concerning their deteriora-
tion state.
3 METHODS
The present work tackles the problem of how to en-
able, augmented decision-making on in-service cargo
wagon brake inspection based on image data acqui-
sition and artificial intelligence. Thus, the approach
will cover a brief introduction to the hardware used
in the data acquisition as well as the multiple steps
of the data processing. In this regard, the proposed
system can be described in four steps, (a) a multi-
camera system that captures real-time images of cargo
wagons, (b) an object detection system for extract-
ing regions of interest and structural components from
the acquired images, (c) a keypoint extraction model,
for the localization of relevant component landmarks,
(d) a scoring module, for the scoring of the health of
brakes through a geometric relation.
3.1 Image Acquisition Pipeline
The image acquisition system is based on a bridge-
like metal structure (Figure. 1) which serves as a sup-
port for a series of six line-scan cameras and six LEDs
for the illumination of the arriving wagons. Further-
more, a laser scanner (Sick LMS111) allows the de-
tection of arriving wagons as well as their incom-
ing velocity. Two of the installed line-scan cameras
(Basler racer raL2048-48gm) are responsible for ac-
quiring images of both sides of the lower section of
the cargo wagons.
Once a wagon approaches the camera bridge, the
laser scanner detects their arrival and their veloc-
ity, automatically adjusting the acquisition rate of the
line-scan cameras as well as the illumination intensity
of the available LEDs. Using the velocity measure-
ment and the individual scans, an image is composed
by horizontally stacking the acquired one pixel wide
scans. Thus, the obtained images have a fixed height
of 2048 pixels and a variable length of between 10K
Towards Cargo Wagons Brake Health Scoring through Image Processing
425

Figure 1: Image acquisition system.
and 50K pixels depending on the type of wagon that
is being scanned and possible variations in speed. Af-
ter the acquisition process, the images are temporally
stored locally before uploading them to a cloud object
storage. A partial example is shown in Figure. 2.
This type of setup allows the real-time acquisition
of cargo wagon images, from a constant perspective,
and without disturbing nor interrupting the daily op-
erations of the railway system. Moreover, the imple-
mentation of this system does not require major struc-
tural changes in the existing infrastructure.
3.2 Object Detection Module
The object detection module receives images of the
lower section of the wagons acquired by the camera
bridge system and extracts regions of interest con-
taining previously selected objects. The detected ob-
jects include brakes, axis, hooks, bumpers, wheels,
and UIC-ID numbers. This step is shared between
the cargo wagon identification and multiple health es-
timation analysis. Nonetheless, the object detection
is performed at lower resolutions than each health
analysis in order to reduce the computational require-
ments of the pipeline. The object detection of the cur-
rent work focuses on the extraction of the four brakes
present in each image.
Before performing the analysis, the images were
normalized and resized to a constant width of 2400.
Then a Faster RCNN (Ren et al., 2015) using as a
backbone a ResNet-101 (He et al., 2016) is used to
perform the object detection. This combination al-
lows the extraction of smaller objects without com-
promising on performance. An example of the de-
tected brakes can be seen in Figure. 2.
To compensate for the changing illumination con-
ditions and the lack of faulty or degraded brakes, the
process of training the Faster RCNN relied on data
augmentations. Specifically, random scale changes,
horizontal flips, and photometric distortions of bright-
ness, contrast, saturation, and hue were added.
3.3 Keypoint Detection Module
The keypoint detection module aims to extract land-
mark locations of the brakes, which are directly re-
lated to their usage and degradation. Having into
consideration the horizontal stretching and compres-
sion generated by the data acquisition system, the
extracted landmarks must suffice to indirectly com-
pute the width of the brake pads, which diminishes
with their remaining useful life (RUL). Thus, for each
brake pad, six keypoints are detected, consisting of
the upper, middle, and lower points of the inner and
outer sides of the pad. Each brake contains two pads,
an upper pad and a lower pad, which are denoted as A
and B respectively. Similarly, the axis of the brake is
also extracted as a keypoint.
The defined keypoints are structural points that ex-
ist in all the brakes of the considered wagon type.
However, in different types of cargo wagons, pad A
can be partially or completely occluded (Figure. 3) by
other structural components such as the leaf springs.
Thus, not all the brake images will contain a full set of
keypoints for the brakes. The selected model for the
keypoint detection is a variant of the Faster RCNN
with a ResNet-101 mentioned before. While using
the same model architecture as before, the bounding
box regressor is modified to compute each keypoint.
Similarly, each brake is extracted from the original
(resolution) image and is normalized and the patch
is resized to a height of 1333 and a width of 800 to
fully utilize the available hardware. During training,
the used data augmentations are the same as the ones
mentioned in the previous step.
Figure 2: Section of cargo wagon image. The green square contains a single detected brake.
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
426

Figure 3: Keypoints of partially occluded brake. Brake pads
border keypoints in green. Brake axis keypoint in red.
3.4 Brake Scoring Module
The brake score module has the aim of computing a
score which is directly related to the RUL of the brake
pads. The pads slowly get eroded while being used,
reducing the effective width of the material which is
in direct contact with the spinning wagon wheels.
While using scale invariant images, this score
could be calculated as the distance in pixels between
the outer and inner borders of the pads. Consequently,
the scale could be used to transform this measure into
metric units for better understanding. With the cur-
rent setup, image stretching must be compensated. As
the changes in velocity during the scan result in vari-
ations of scale along the horizontal axis, which are
not constant at a global scale, but are stable locally.
Thus, a reliable proxy measurement can be achieved,
by computing the ratio between the width of the brake
pad and the distance from the center of the pad to the
axis of the brake. As the scale changes for different
images, the distances between the points will change
proportionally given Thales’s theorem, ensuring that
the ratio is maintained. Specifically, the ratio score
R
B,mid
of the mid-section of the B pad is denoted in
Equation 1. The numerator indicates the width of the
brake B in the mid-section, and the denominator indi-
cates the distance between the center of the brake B
and the axis.
R
B,mid
=
∥P
B,mid,out
− P
B,mid,in
∥
2
∥
P
B,mid,out
+P
B,mid,in
2
− P
axis
∥
2
(1)
3.5 Implementation and Testing
The proposed system was implemented in two main
components. The first one is the image acquisition
pipeline, which consists of the described hardware
and communication systems for the acquisition of the
cargo wagon images and their transmission to an ob-
ject storage.
The second component is the joint pipeline of ob-
ject detection, keypoint detection, and brake scoring.
To obtain a scalable system, both deep learning mod-
els were implemented in Pytorch. The complete anal-
ysis was implemented as a five-step task, which (a)
downloads an image; (b) detects the objects of in-
terest and filters the brake images; (c) computes the
brake pad scores for each brake instance; (d) sends
the results of the analysis to a specified webhook. To
enable parallel execution, the Python library Ray was
used and exposed through a REST API.
Subsequently, the wagon type Hbbillns 305 was
selected for the training and validation of the pro-
posed approach. This reference is one of the most
prevalent in the analyzed fleet, containing two axes
per wagon and two brakes per axis, which only have
minor structural variations. Through the operation of
the camera bridge, a constant supply of cargo wagon
images was achieved. Over 2000 of the acquired im-
ages were used for training, and testing of this ap-
proach. From these images, 425 were used for the
training and testing of the object detection algorithm.
Next, 480 of the labeled brakes were extracted and
labeled for the training and testing of the keypoint de-
tection algorithm. Once both algorithms were trained,
1642 images were used for validating the complete
pipeline.
4 RESULTS
4.1 Image Acquisition Pipeline
During the implementation of the current concept,
two camera bridge systems were built in Germany.
Each camera bridge was installed at a marshalling
yard, with the objective of scanning the cargo wag-
ons during their reorganization process. On average,
a single image of the lower sections of a cargo wagon
has a volume of 5 megabytes. Usually, between 1500
and 2000 images of said type are acquired daily per
camera bridge, depending on their location and traf-
fic. The implementation of the camera bridge systems
also contains an RFID reader, which aids in the iden-
tification of over half of the cargo wagons which con-
tain RFID tags. After the acquisition, the images are
composed locally after being transferred to a cloud
object storage periodically.
Towards Cargo Wagons Brake Health Scoring through Image Processing
427
4.2 Object Detection Module
To train the Faster RCNN object detection algorithm,
a set of 425 lower images of cargo wagons type Hb-
billns 305 were labeled. Subsequently, these images
were split into 340 images used for training and 85
images used for testing. An available pre-trained
model on ImageNet (Deng et al., 2009) (from pytorch
zoom) was used, and all layers were trained for 10
epochs. The model was implemented using the Py-
torch framework and trained in an Ubuntu server with
an Intel Xeon Silver 4116 CPU and a Tesla V100
GPU. Through this process, a mean Average Preci-
sion mAP75 of 0.84 and a mAP50 of 0.973 were
achieved.
4.3 Keypoint Detection Module
From the previous step, a total of 480 brakes were
extracted. These images had varying dimensions of
roughly 800x1200 pixels. To label the previously
shown keypoints, the images had to be equalized, as
the human eye has difficulties with low contrast im-
ages, which still contained brakes. Then, the images
were split into 384 images used for training and 96
images used for testing. Similar hardware and a pre-
trained backbone were used during a 10 epochs train-
ing. As a result, an mAP75 of 0.917 and a mAP50 of
0.968 were achieved. Additionally, the detected key-
points had a vertical and horizontal Mean Average Er-
ror of 4.33 pixels in comparison with the annotations.
An example of the detected keypoints can be seen in
Figure. 4.
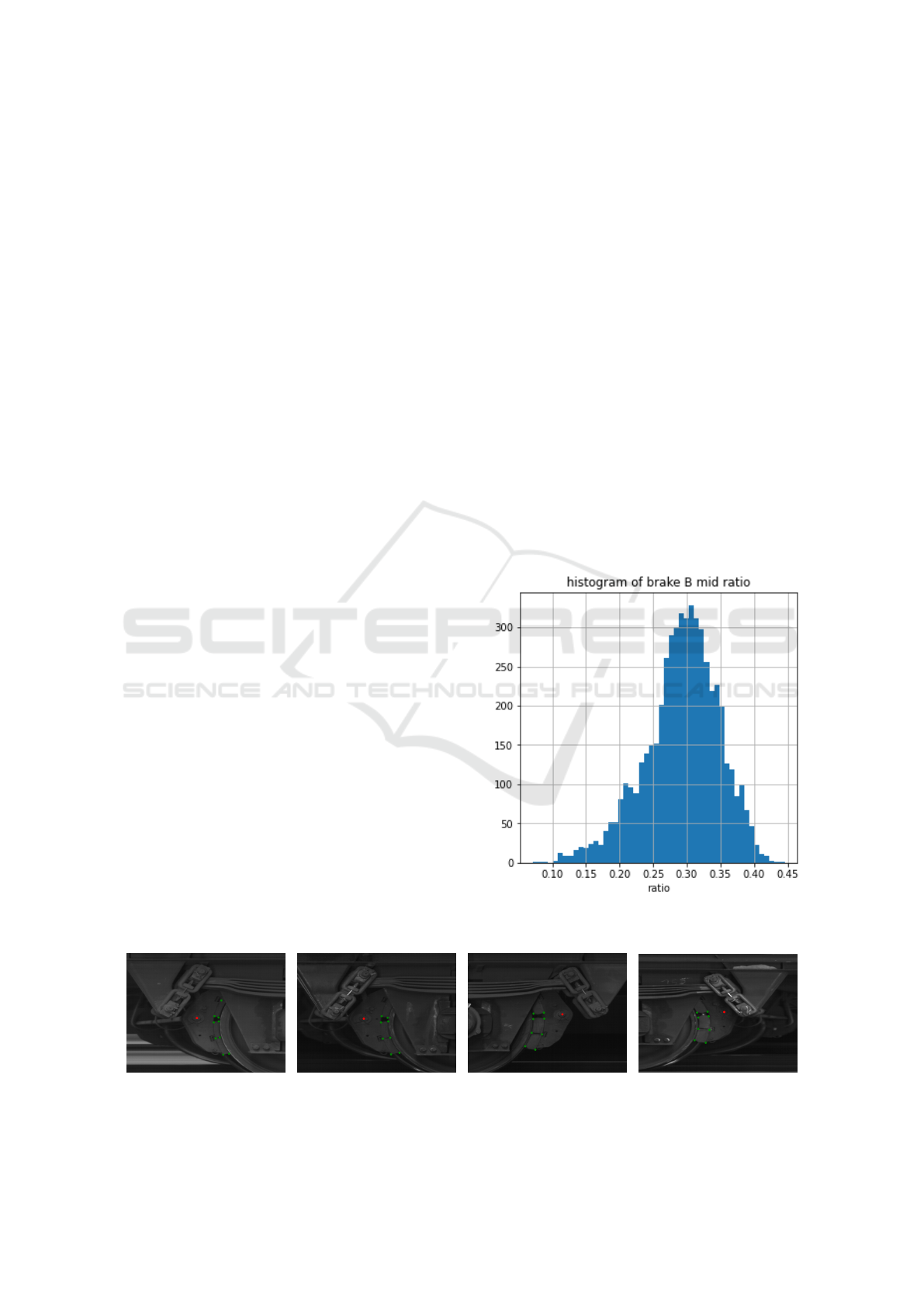
4.4 Brake Scoring Module
After the training of the previous models, a new set
of 1642 lower images from cargo wagons type Hb-
billns 305 were analyzed. In these images, a total of
5911 brakes were extracted. The keypoints of the im-
ages were detected and the mid-ratio of the brake pad
B was computed. As seen in the histogram of Fig-
ure. 5, an average ratio of 0.292 was observed. It can
be observed that the distribution of brakes follows a
skewed normal distribution. Most of the brakes which
are completely new, or recently installed, will have
a ratio in-between 0.35 and 0.45. Similarly, brakes
with a ratio between 0.15 and 0.35, still have a long
RUL. Finally, the brakes with ratios lower than 0.15,
are soon to require a change. These observations were
performed with a domain expert from DB Cargo AG.
It must be clarified, that no brake in the dataset ap-
proached critical levels, as all are changed with spare
time. The direct detection of their health score will
enable better planning and observability of the main-
tenance process, which will allow better scheduling
of the required resources.
The distribution shown in Figure. 5, allows a more
comprehensive understanding of the state of the brake
pads, in contrast with the single measures of brake
width which are currently distorted by the scale vari-
ance of the images. This scale variance can be ob-
served in the scatter plot from Figure. 6, in which
each analyzed brake is a point. The horizontal axis
is the distance between the center of the brake to the
axis, and the vertical axis is the width of the brake
pad, also called delta.
Figure 5: Histogram of (scores) ratios from the mid-section
of the brake B.
(a) Brake with score 0.15. (b) Brake with score 0.24. (c) Brake with score 0.33. (d) Brake with score 0.42.
Figure 4: Result of keypoint detection on cargo wagon brake and scored brake pads.
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
428

Figure 6: Scatter plot of distance from the center of a brake
to the axis vs the width of a brake pad.
Interpreting the distance between the center of the
brake B and the axis, it can be noticed that the scale
difference between two images can be up to a factor
of two. This representation shows how images, which
have different scales, can be processed to obtain a sta-
ble ratio of the state of the brake pads. Example im-
ages of different brake scores (ratios) are shown in
Figure. 4. In these results, brakes with a lower ratio
have been worn out and should be scheduled for main-
tenance. Similarly, brakes with a higher ratio have a
longer RUL.
5 CONCLUSION
In the current work, a novel system for cargo wagon
brake scoring is presented. This system aims to auto-
matically extract relevant information from in-service
cargo wagons in order to enable better decision-
making with respect to their maintenance require-
ments. It tackles the challenge of computing a score
proportional to the RUL of a brake instead of imple-
menting binary classification in search of defects. The
novel system is robust to scale variant image acqui-
sition techniques and allows the processing of cargo
wagons under varied illumination conditions.
The proposed system is composed of four main
steps, (a) a camera bridge for image acquisition, (b)
an object detection algorithm for the extraction of re-
gions of interest, (c) a keypoint detection algorithm
for the extraction of landmarks in a brake, (d) a brake
scoring module for the estimation of the degradation
of brakes.
The proposed system was described, imple-
mented, and tested. The object detection system
achieved an mAP50 of 0.973 and the keypoint detec-
tion system obtained an mAP50 of 0.968. The scoring
module was then tested with 1642 new lower images
of cargo wagons. The exploration of the results shows
that a mean ratio of 0.292 indicates healthy brake
pads, and ratios close to 0.1 are related to worn-out
brake pads. The results of the implementation show
the viability of the proposed approach.
Future work will focus on five different topics.
First, although the current selected models show an
outstanding performance, migration to single shot de-
tection model can reduce significantly the required
computational resources. Second, explore the trans-
ferability of this approach to other wagon types within
the cargo fleet. Third, developing methods for the
compensation of the scale variance of the images, in
order to achieve metric measures of the state of the
brake pads. Fourth, exploring other approaches to
merge multiple data sources in order to relate the ob-
tained scores with the RUL of the brake (time remain-
ing before requiring maintenance). Fifth, exploring
other unsupervised or semi-supervised approaches for
the discovery, extraction, and labeling of objects and
landmarks in large cargo wagon databases. Finally,
by taking into account the RUL and the expected de-
terioration of each trajectory, the obtained data can be
used to better plan train schedules to include prescrip-
tive maintenance.
ACKNOWLEDGEMENTS
Research supported by the Federal Ministry of Trans-
port and Digital Infrastructure of Germany (BMVI) –
Project QUISS (19F2060).
REFERENCES
DB Cargo AG (2021). Your Logistics Partner.
Deng, J., Dong, W., Socher, R., Li, L., Li, K., and Fei-Fei,
L. (2009). Imagenet: A large-scale hierarchical image
database. In 2009 IEEE Computer Society Conference
on Computer Vision and Pattern Recognition (CVPR
2009), 20-25 June 2009, Miami, Florida, USA, pages
248–255. IEEE Computer Society.
Gavai, G., Eldardiry, H., Wu, W., Xu, B., Komatsu, Y., and
Makino, S. (2019). Hybrid image-based defect de-
tection for railroad maintenance. Electronic Imaging,
2019(9):360–1.
GCU Bureau (2021). General contract of use for wagons
general contract of use for wagons GCU. Technical
report.
Hamey, L. G. C., Watkins, T., and Yen, S. W. T. (2007).
Pancam: In-service inspection of locomotive pan-
tographs. In Proceedings of the International Con-
Towards Cargo Wagons Brake Health Scoring through Image Processing
429

ference on Digital Image Computing: Techniques and
Applications, DICTA 2007, 3-5 December 2007, Ade-
laide, Australia, pages 493–499. IEEE Computer So-
ciety.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In 2016 IEEE Con-
ference on Computer Vision and Pattern Recognition,
CVPR 2016, Las Vegas, NV, USA, June 27-30, 2016,
pages 770–778. IEEE Computer Society.
Jaccard, N., Rogers, T. W., Morton, E. J., and Griffin,
L. D. (2016). Detection of concealed cars in com-
plex cargo x-ray imagery using deep learning. CoRR,
abs/1606.08078.
Kolokytha, S., Flisch, A., L
¨
uthi, T., Plamondon, M., Visser,
W., Schwaninger, A., Hardmeier, D., Costin, M.,
Vienne, C., Sukowski, F., Hassler, U., Dorion, I.,
Gadi, N., Maitrejean, S., Marciano, A., Canonica, A.,
Rochat, E., Koomen, G., and Slegt, M. (2018). Cre-
ating a reference database of cargo inspection x-ray
images using high energy radiographs of cargo mock-
ups. Multim. Tools Appl., 77(8):9379–9391.
Li, B., Zhou, S., Cheng, L., Zhu, R., Hu, T., Anjum, A., He,
Z., and Zou, Y. (2019). A cascade learning approach
for automated detection of locomotive speed sensor
using imbalanced data in ITS. IEEE Access, 7:90851–
90862.
Li, Y., Trinh, H., Haas, N., Otto, C., and Pankanti, S. (2014).
Rail component detection, optimization, and assess-
ment for automatic rail track inspection. IEEE Trans.
Intell. Transp. Syst., 15(2):760–770.
Liu, L., Zhou, F., and He, Y. (2016). Automated visual
inspection system for bogie block key under com-
plex freight train environment. IEEE Trans. Instrum.
Meas., 65(1):2–14.
Liu, Z., Wang, Z., and Xing, Y. (2019). Wagon num-
ber recognition based on the yolov3 detector. In
2019 IEEE 2nd International Conference on Com-
puter and Communication Engineering Technology
(CCET), pages 159–163. IEEE.
Ningning, L., Yuehui, M., Wang, Y., and Wang, N. (2016).
An algorithm of freight train number locating based
on template matching and morphological operations.
Metallurgical and mining industry, (2):102–107.
Otte, T., Bartels, H., Posada Moreno, A. F., Wittenburg, G.,
and Haßler, M. (2020). Holistic data infrastructure
and analytics system for rail freight transport. In 14th
ITS European Congress. 14th ITS European Congress
via 1st Virtual ITS European Congress, online, 9 Nov
2020 - 10 Nov 2020.
Pahwa, R. S., Chandrasekhar, V. R., Chao, J., Paul, J., Li,
Y., Nwe, M. T. L., Xie, S., James, A., Ambikapathi,
A., and Zeng, Z. (2019). Faultnet: Faulty rail-valves
detection using deep learning and computer vision. In
2019 IEEE Intelligent Transportation Systems Confer-
ence, ITSC 2019, Auckland, New Zealand, October
27-30, 2019, pages 559–566. IEEE.
Peng, Z., Wang, C., Ma, Z., and Liu, H. (2020). A mul-
tifeature hierarchical locating algorithm for hexagon
nut of railway fasteners. IEEE Trans. Instrum. Meas.,
69(3):693–699.
Posada Moreno, A., Klein, C., Haßler, M., Pehar, D.,
Solvay, A., and Kohlschein, C. (2020). Cargo wagon
structural health estimation using computer vision. 8th
Transport Research Arena, TRA2020, pages 04–27.
Ren, S., He, K., Girshick, R. B., and Sun, J. (2015). Faster
R-CNN: towards real-time object detection with re-
gion proposal networks. In Cortes, C., Lawrence,
N. D., Lee, D. D., Sugiyama, M., and Garnett, R.,
editors, Advances in Neural Information Processing
Systems 28: Annual Conference on Neural Informa-
tion Processing Systems 2015, December 7-12, 2015,
Montreal, Quebec, Canada, pages 91–99.
Rocha, R. L., Siravenha, A. C. Q., Gomes, A. C. S., Serejo,
G. L., Silva, A. F. B., Rodrigues, L. M., Braga, J.,
Dias, G., Carvalho, S. R., and de Souza, C. R. B.
(2018). A deep-learning-based approach for auto-
mated wagon component inspection. In Haddad,
H. M., Wainwright, R. L., and Chbeir, R., editors, Pro-
ceedings of the 33rd Annual ACM Symposium on Ap-
plied Computing, SAC 2018, Pau, France, April 09-
13, 2018, pages 276–283. ACM.
Rogers, T. W., Jaccard, N., and Griffin, L. D. (2017). A
deep learning framework for the automated inspec-
tion of complex dual-energy x-ray cargo imagery. In
Anomaly Detection and Imaging with X-Rays (ADIX)
II, volume 10187, page 101870L. International Soci-
ety for Optics and Photonics.
Rogers, T. W., Jaccard, N., Morton, E., and Griffin, L.
(2015). Detection of cargo container loads from x-
ray images. In 2nd IET International Conference on
Intelligent Signal Processing 2015 (ISP), pages 1–6.
IET.
Rong, J., Song, S., Dang, Z., Shi, H., and Cao, Y. (2016).
Rail track irregularity detection method based on com-
puter vision and gesture analysis. Int. J. Online Eng.,
12(12):55–59.
Shang, L., Yang, Q., Wang, J., Li, S., and Lei, W. (2018).
Detection of rail surface defects based on cnn image
recognition and classification. In 2018 20th Interna-
tional Conference on Advanced Communication Tech-
nology (ICACT), pages 45–51. IEEE.
Sun, X., Ding, J., Chiara, G. D., Cheah, L., and Cheung,
N. (2017). A generic framework for monitoring lo-
cal freight traffic movements using computer vision-
based techniques. In 5th IEEE International Con-
ference on Models and Technologies for Intelligent
Transportation Systems, MT-ITS 2017, Naples, Italy,
June 26-28, 2017, pages 63–68. IEEE.
Tuszynski, J., Briggs, J. T., and Kaufhold, J. (2013). A
method for automatic manifest verification of con-
tainer cargo using radiography images. Journal of
Transportation Security, 6(4):339–356.
Union Internationale des Chemins de fer (2020). uic work
programme 2020-2022. Technical report.
Union Internationale des Chemins de fer (2021). Vademe-
cum (List of UIC members).
Visser, W., Schwaninger, A., Hardmeier, D., Flisch, A.,
Costin, M., Vienne, C., Sukowski, F., Hassler, U., Do-
rion, I., Marciano, A., Koomen, G., Slegt, M., and
Canonica, A. C. (2016). Automated comparison of x-
ray images for cargo scanning. In IEEE International
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
430

Carnahan Conference on Security Technology, ICCST
2016, Orlando, FL, USA, October 24-27, 2016, pages
1–8. IEEE.
Xiang, X., Yang, F., Wang, M., Bao, W., and Sheng, Y.
(2016). Id localization and recognition for railway
oil tank wagon in the industrial scene. In 2016 12th
World Congress on Intelligent Control and Automa-
tion (WCICA), pages 826–829. IEEE.
Xiucai, G. and Gongli, C. (2020). Railway freight train
number detection method based on deep learning. In
2020 IEEE 9th Joint International Information Tech-
nology and Artificial Intelligence Conference (ITAIC),
volume 9, pages 927–930. IEEE.
Zhang, D., Song, K., Wang, Q., He, Y., Wen, X., and Yan, Y.
(2021a). Two deep learning networks for rail surface
defect inspection of limited samples with line-level la-
bel. IEEE Trans. Ind. Informatics, 17(10):6731–6741.
Zhang, Y., Lin, K., Zhang, H., Guo, Y., and Sun, G. (2018).
A unified framework for fault detection of freight train
images under complex environment. In 2018 IEEE
International Conference on Image Processing, ICIP
2018, Athens, Greece, October 7-10, 2018, pages
1348–1352. IEEE.
Zhang, Y., Liu, M., Chen, Y., Zhang, H., and Guo, Y.
(2020). Real-time vision-based system of fault detec-
tion for freight trains. IEEE Trans. Instrum. Meas.,
69(7):5274–5284.
Zhang, Y., Liu, M., Yang, Y., Guo, Y., and Zhang, H.
(2021b). A unified light framework for real-time fault
detection of freight train images. IEEE Trans. Ind. In-
formatics, 17(11):7423–7432.
Zhou, F., Song, Y., Liu, L., and Zheng, D. (2018). Auto-
mated visual inspection of target parts for train safety
based on deep learning. IET Intelligent Transport Sys-
tems, 12(6):550–555.
Towards Cargo Wagons Brake Health Scoring through Image Processing
431
