
Aerial Fire Image Synthesis and Detection
Sandro Campos and Daniel Castro Silva
Faculty of Engineering of the University of Porto, Artificial Intelligence and Computer Science Laboratory,
Rua Dr. Roberto Frias s/n, 4200-465 Porto, Portugal
Keywords:
Fire Detection, Unmanned Aerial Vehicle, Convolutional Neural Network, Data Imbalance, Data
Augmentation, Generative Adversarial Network, Multi-agent System.
Abstract:
Unmanned Aerial Vehicles appear as efficient platforms for fire detection and monitoring due to their low
cost and flexibility features. Detecting flames and smoke from above is performed visually or by employ-
ing onboard temperature and gas concentration sensors. However, approaches based on computer vision and
machine learning techniques have identified a pertinent problem of class imbalance in the fire image domain,
which hinders detection performance. To represent fires visually and in an automated fashion, a residual neu-
ral network generator based on CycleGAN is implemented to perform unpaired image-to-image translation
of non-fire images obtained from Bing Maps to the fire domain. Additionally, the adaptation of ERNet, a
lightweight disaster classification network trained on the real fire domain, enables simulated aircraft to carry
out fire detection along their trajectories. We do so under an environment comprised of a multi-agent dis-
tributed platform for aircraft and environmental disturbances, which helps tackle the previous inconvenience
by accelerating artificial aerial fire imagery acquisition. The generator was tested using the metric of Fr
´
echet
Inception Distance, and qualitatively, resorting to the opinion of 122 subjects. The images were considered di-
verse and of good quality, particularly for the forest and urban scenarios, and their anomalies were highlighted
to identify further improvements. The detector performance was evaluated in interaction with the simulation
platform. It was proven to be compatible with real-time requirements, processing detection requests at around
100 ms, reaching an accuracy of 90.2% and a false positive rate of 4.5%.
1 INTRODUCTION
The extreme environmental conditions increasingly
promoted by climate change make it particularly
likely for natural disaster phenomena to occur each
year. The especially vulnerable sub-tropical climate
of the Mediterranean basin, as an example, starts out-
lining a trend of abnormally extended and power-
ful fire seasons (Turco et al., 2019). Consequently,
Southern European countries such as Portugal, Spain,
Italy and Greece have been frequently ravaged by un-
controlled and disproportional fires leaving trails of
destruction behind (PORDATA, 2020). If not for fires,
storms, droughts, and floods are amongst the many
disasters that unfortunately take place. In fact, most
death and damage is related to the latter three (WMO,
2021). According to the United Nations, weather-
related disasters have surged five-fold in just a short
time frame of 50 years, impacting poorer countries
the worst. All of these are reminders of worldwide
concerns that require closer coordination of means
and agile mechanisms for both controlling and pre-
venting them. This work aims to stimulate the use of
fire imaging techniques to improve aerial fire detec-
tion, considering simultaneously a possible expansion
to other scenarios.
The pertinence of studying these natural disasters
has driven scientists to develop simulation tools ca-
pable of managing vehicles under coordinated mis-
sions. The Platform is an example of such a tool, and
recent developments have allowed aerial vehicles to
assess fire propagation by means of sensor readings
(Almeida, 2017) (Damasceno, 2020); however, the
potential of performing disaster control using aerial
imagery is still unexplored.
Our work aims at filling the previous gap, by fo-
cusing on the development of an external module to
enable the creation of a pipeline for synthetic fire gen-
eration and detection using aerial imagery. It primar-
ily tackles the following tasks:
1. Generation of synthetic flames and smoke on
aerial images captured by the simulated aircraft;
2. Adaptation of a lightweight model to detect fire in
the generated images, in a real-time scenario.
Campos, S. and Silva, D.
Aerial Fire Image Synthesis and Detection.
DOI: 10.5220/0010829400003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 2, pages 273-284
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
273
This work follows a recent and growing trend of
producing synthetic data to train highly complex ma-
chine learning models (Tripathi et al., 2019), with
applications to domains such as autonomous driving
(Hollosi and Ballagi, 2019), product identification in
warehouses (Wong et al., 2019), and even fire detec-
tion (Park et al., 2020). This line of thought preaches
the generation of diverse and large datasets, which
typically mix real samples with synthetic ones to help
reduce the inconvenience of data imbalance faced by
most prediction problems. The models constructed
by this technique are then of use in the real domain
with improved results. In this work, we address the
problem of fire detection using imagery. The fire
images generated by our model are assessed accord-
ing to their degree of realism, both quantitatively and
qualitatively, and proven to be of value by demonstra-
bly good real fire detectors standards.
The remaining of this document is structured as
follows. Section 2 provides a literature review of im-
age generation and classification techniques, partic-
ularly adapted to the fire domain. Sections 3 and 4
present more detailed information about the proposed
solution and its implementation, respectively. Section
5 describes the mechanisms used to validate the qual-
ity of the generated images and the performance of
the fire detector. Finally, Section 6 gathers relevant
conclusions and future work topics.
2 STATE OF THE ART
Three main strategies are primarily considered when
one intends to automate the synthetic image genera-
tion necessary for the simulation of an onboard cam-
era. The first one resorts to image rendering based
on CAD (Computer-Aided Design) models, the sec-
ond to compositing techniques, and the third to state-
of-the-art Generative Adversarial Networks (GANs).
More recently, deep-learning-based image inpainting
has also proved to produce realistic features in im-
agery, especially when the context of their surround-
ing environment is considered.
Real-time optical fire detection approaches also
leverage the power of deep learning models. Pre-
trained with extensive and diverse sets of aerial im-
ages, these models have become competitive by de-
ploying such capabilities to devices with low compu-
tational resources.
2.1 Computer Aided Design
Computer Graphics Software (CGS) has more re-
cently found its way into popularity due to the in-
creasing computational power sprawl, as more capa-
ble Graphics Processing Units (GPUs) surge. Soft-
ware tools such as Autodesk 3ds Max
1
, Blender
2
and
Unity 3D
3
enable the manipulation of CAD models,
three-dimensional polygonal meshes representative of
objects, and provide a suitable environment for creat-
ing virtual scenes. These applications often include
rendering engines responsible for encoding the world
information into a synthetic image and scripts are de-
veloped to perform batch generation. Figure 1 il-
lustrates a fire simulation attempt using Corona Ren-
derer
4
for Autodesk 3ds Max.
Figure 1: Three-dimensional fire rendering using Corona
for Autodesk 3ds Max (MographPlus, 2018).
Approaches based on rendering of CAD models,
despite being proven to produce realistic high-quality
images, require heavy computational resources and
are very dependent on human intervention for image
customization and rendering (Arcidiacono, 2018).
2.2 Image Compositing
Another technique, known as image compositing,
consists of extracting foreground objects from images
and pasting them on new backgrounds (Rother et al.,
2004). In comparison to image rendering, it is less
demanding when ensuring global image high quality
and local consistency.
Driven by the lack of annotated images, Dwibedi
et al. presented Cut, Paste and Learn, in 2017,
a method to generate synthetic images by applying
this concept while focusing on patch-level realism
(Dwibedi et al., 2017). This advancement was signifi-
cant, considering placing features over image back-
grounds may create pixel artifacts at a local level,
which, when propagated into the neural classifier,
may induce it to ignore the introduced features, fail-
ing their detection.
1
Available at: https://www.autodesk.com/products/3ds-
max/overview
2
Available at: https://www.blender.org/
3
Available at: https://unity.com/
4
Available at: https://corona-renderer.com/
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
274

The literature does not provide much insight into
fire image synthesis using image compositing tech-
niques. This can be explained by the difficulty of
segmenting flames and smoke and obtaining viable
masks for accurate overlapping.
2.3 Generative Neural Networks
First proposed by Ian Goodfellow, generative adver-
sarial networks are deep generative models consist-
ing of two deep neural networks, a generator G and
a discriminator D, opposing each other in a min-max
zero-sum game (Goodfellow et al., 2014). The gen-
erator is responsible for creating synthetic data out of
a latent vector p
z
(z), while the discriminator evalu-
ates whether data is real or fake, when in comparison
with real samples from the same domain. The two
networks are connected, considering the output of the
generator is, along with the real dataset, provided as
input to the discriminator. GANs are trained to min-
imize the generator’s error rate, until convergence is
reached, with the improvement of the generator’s data
creation skills and the increasing inability of the dis-
criminator for detecting the forged imagery. Figure 2
portrays a schematic representation of a GAN.
Figure 2: GANs are comprised of generator and discrim-
inator networks. The generator produces fake data for a
target domain. The discriminator provides feedback on its
outcome by comparing it to real training data (Silva, 2017).
Unpaired Image-to-Image Translation using
Cycle-Consistent Adversarial Networks (Cycle-
GANs), presented in 2017, is a type of generative
neural network which enables the construction of
two bijective mappings, reverse of one another,
between two image domains (Zhu et al., 2017). Data
augmentation techniques using CycleGANs have
appeared in domains where imagery is difficult or
expensive to acquire, as is the case of fire detection
(Park et al., 2020).
Park et al. identified the problem of class imbal-
ance in the wildfire detection domain and presented
a solution based on synthetic fire image generation
(Park et al., 2020), employing CycleGANs (Zhu et al.,
2017) and DenseNets (Densely Connected Convolu-
tional Network) (Huang et al., 2017). CycleGANs
enable the creation of fire images from previously col-
lected non-fire images, by allowing the conversion
of domain and the respective introduction of fire vi-
sual features. Cycle consistency and identity mapping
losses are considered to prevent the model from per-
forming unintended changes of shape and color to the
original image backgrounds, while maintaining them.
This procedure allowed for a better balance between
image classes to be fed into the neural network. Wild-
fire images support increased from 43% to over 49%
and allowed to almost double the total number of im-
ages on the dataset. Figure 3 presents a sample of
wildfire images generated by this approach.
Figure 3: The images of mountains in the top row are suc-
cessfully translated to the fire domain using a CycleGAN,
with the respective results portrayed in the bottom row (Park
et al., 2020).
2.4 Image Inpainting
Neural networks have also intervened in image in-
painting, the process which focuses on restoring de-
teriorated images. It can include filling missing parts,
repairing casual damage and removing unintended ar-
tifacts such as noise, scratches and other distortions
(El Harrouss et al., 2020). These techniques aim to
leave no trace of reconstruction to increase image re-
alism and make tampering as undetectable as possi-
ble. As a consequence, they are also considered for
introducing new features into imagery.
Liu et al. proposed a novel approach with a gen-
eration phase subdivided into rough and refinement
sub-networks combined with a feature patch discrim-
inator, as seen in Fig. 4.
Figure 4: Architecture of the Coherent Semantic Attention
network. The first sub-network creates rough pixel predic-
tions while the second refines them to obtain better correla-
tion of pixels between patches (Liu et al., 2019).
Aerial Fire Image Synthesis and Detection
275
The rough network predicts initial rough features
for unknown patches based on known neighbour-
ing regions, advocating global semantic consistency.
These are afterwards refined, in the sub-network
where an auxiliary coherent semantic attention (CSA)
layer is included. It allows generated patches to have
a better correlation with neighbouring patches of the
same unknown region, largely increasing coherency
between pixels at a local level. This layer is located at
resolution 32x32, as it appears to optimize model per-
formance and needed computing requirements. Mov-
ing the layer to shallower positions may cause loss of
information and increase the computational overhead
due to the operations being performed at higher reso-
lutions, while shifting it to deeper positions enhances
execution times at the expense of image quality. A
pretrained VGG-16 (Simonyan and Zisserman, 2015)
network is also of use to extract features from the
original images, introducing them as input on down-
sampling layers of the refinement network to speed up
and optimize feature generation.
2.5 Optical Fire Detection
Many fire detection approaches using UAVs still rely
on the communication with ground stations for data
processing. These stations are usually equipped with
high-end computing hardware capable of executing
the heaviest of prediction models. However, in re-
ality, UAVs performing missions on disaster con-
trol are subject to very limited visibility and con-
nectivity. As a consequence, scientists are encour-
aged to pursue the development of self-contained,
fully autonomous embedded systems for fire detec-
tion based on lightweight implementations of state-
of-the-art deep learning methods.
Kyrkou and Theocharides developed a custom
CNN (Convolutional Neural Network) architecture
named ERNet, for emergency response and disaster
management, highlighted in this work (Kyrkou and
Theocharides, 2019). Their approach opposes that of
many techniques, which adapt pre-trained networks,
such as that of ResNet-50 (Residual Neural Network)
(He et al., 2016) and VGG-16, in a process of transfer
learning for image classification, resorting to the use
of high-performance GPUs. They limited the number
of filters applied in order to speed up computations
and reduced parameter size, according to the scarce
memory available onboard of such vehicles. Residual
connections on the computational blocks were also
useful to improve model accuracy, while not hinder-
ing performance significantly.
This network was trained to classify disasters ac-
cording to 4 different incident types, in which fire is
included. AIDER (Aerial Image Dataset for Emer-
gency Response) is the augmented dataset created for
this purpose. The detector achieved a mean accuracy
of 90% at 53 FPS (Frames Per Second) and it con-
sumed no more than 300 KB of memory, allowing for
onboard real-time detection and on-chip storage.
3 PROPOSED SOLUTION
The proposed solution comprises the development of
an external service, designated Fire Module, capable
of interacting with vehicles to perform fire generation
and detection in images captured from an aerial per-
spective. In a real environment, considering it is em-
bedded in the firmware of actual aircraft, and given
that aircraft shall be provided with onboard cameras
for image acquisition on assessment missions, this
module is most helpful in performing detection. In a
simulated environment, however, the solution consid-
ers the existence of a service that simulates said cam-
eras by generating aerial imagery of a specific type of
disturbance. Consequently, one may require an addi-
tional module to simulate the actual behaviour of the
disturbance over the terrain.
We integrate this architecture within The Plat-
form, a multi-agent distributed system that provides
a simulation environment based on Microsoft Flight
Simulator X (FSX) for fleets of autonomous, hetero-
geneous vehicles. These vehicles intervene in the pro-
cess of assessing disturbances in missions that range
from pollution source identification to fire detection in
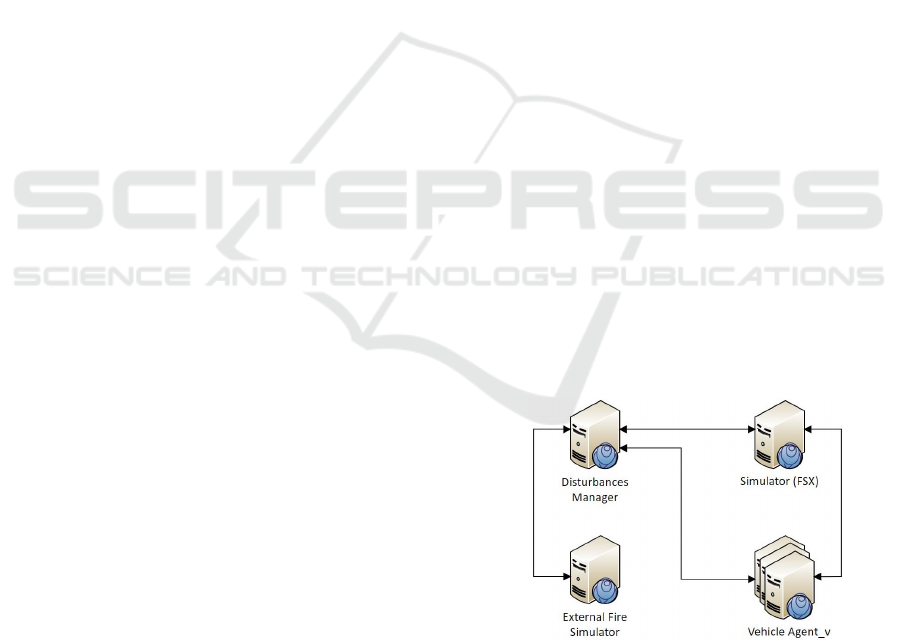
outdoor environments (Silva, 2011). Figure 5 depicts
the relevant components of The Platform’s architec-
ture for this work and their respective relationships.
Figure 5: Relevant entities of The Platform and their respec-
tive interactions. The Disturbances Manager generates dis-
turbances that affect the simulation environment where ve-
hicles perform missions. The External Fire Simulator helps
to reproduce the realistic behaviour of fire. (adapted from
(Damasceno, 2020)).
The Vehicle Agent is responsible for the simula-
tion of an aircraft in FSX, enabling, for instance, nav-
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
276
igation control (Silva, 2011). The Disturbances Man-
ager (DM) creates and manages all disturbances in the
simulation environment. ForeFire intervenes as an ex-
ternal disturbance simulator that more accurately and
realistically simulates the fire spread behaviour over
the terrain (Filippi et al., 2014).
The solution congregates therefore five interact-
ing entities: the previously existing Vehicle Agents,
DM and ForeFire, and the new Fire Module, com-
prised of a Camera Simulator and a Fire Detector, and
the Maps API (Application Programming Interface),
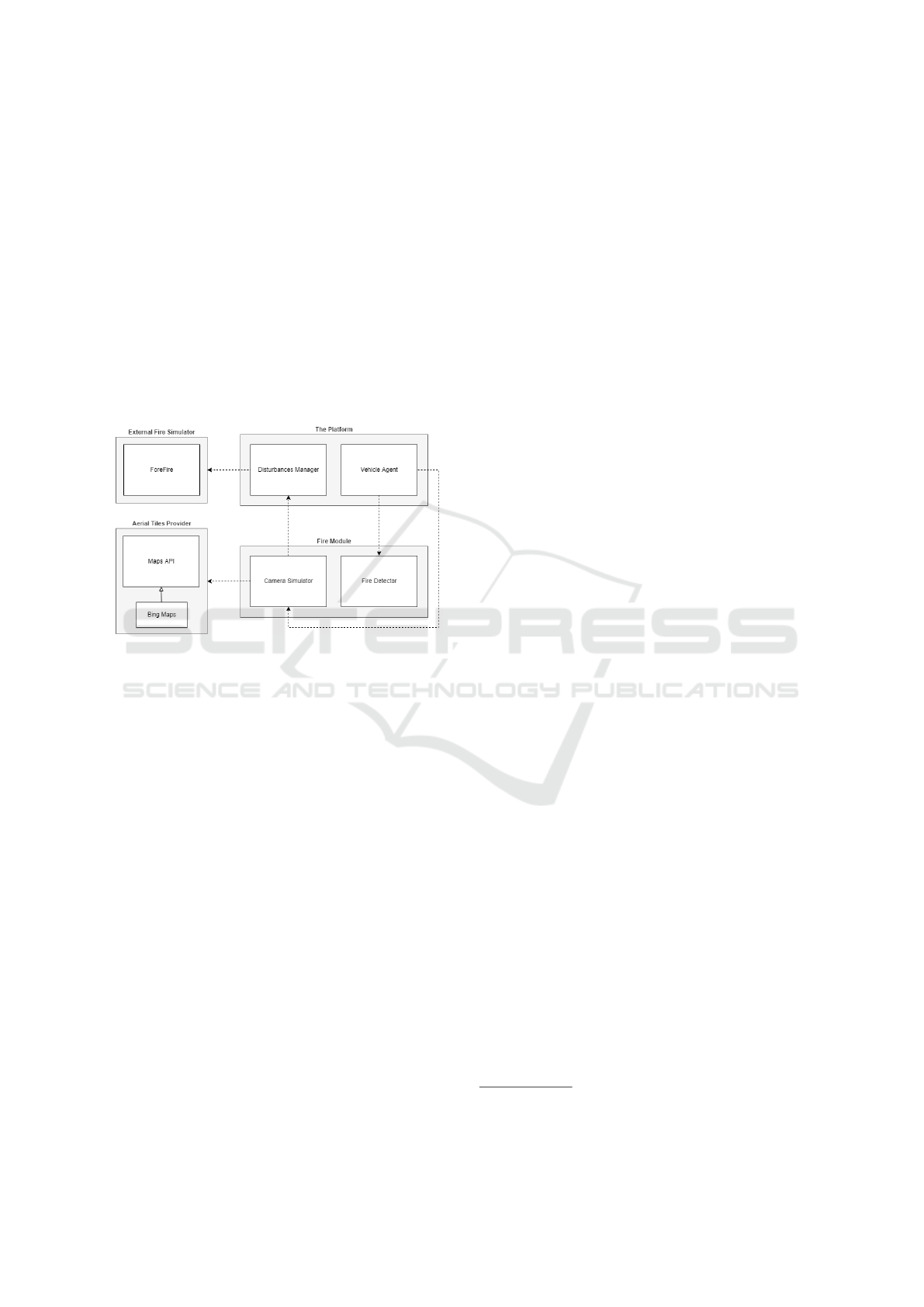
an external aerial tiles provider. The container dia-
gram of Fig. 6 depicts the integration of the micro-
service within this simulation platform, the most rel-
evant components and their relationships.
Figure 6: Container diagram depicting the Fire Module
within the system and its respective dependencies.
The Fire Module has been designed as a micro-
service based on a RESTful architecture, as it shall
provide independent, loosely coupled features to sev-
eral vehicle instances cooperating simultaneously.
This approach aims to increase modularity, increase
resilience to faults, and ease the deployment process
for devices on the edge. This decision preaches bet-
ter isolation of concerns and the integration of solu-
tions using diversifying technologies, valuing flexi-
bility and, most importantly, the system’s scalability.
The module is synchronised with the DM and there-
fore portrays the disturbances consistently for all ve-
hicles participating in the same mission, advocating
better management of resources.
When a Vehicle Agent is performing a fire assess-
ment mission, it connects to the Camera Simulator
and requests the aerial image of its own point of view.
This image, originally collected from the aerial tiles
provider (ATP), at the vehicle’s position, may or may
not contain flames and smoke, depending on both the
distance of the vehicle to the fire area and the orien-
tation of the camera in relation to it. For that, the
fires’ location is always provided to the Camera Sim-
ulator by the DM. In case the simulated camera does
not capture the fire, the image returned to the vehi-
cle corresponds to the tile just as it was obtained from
its provider, meaning it does not undergo any change.
Otherwise, a residual neural network trained using
CycleGAN proves its ability of performing non-fire to
fire image domain translation, on demand, and returns
the synthetic image with the fire features in place. The
Vehicle Agent then provides the received image to the
lightweight neural network of the module’s Fire De-
tector which performs binary classification on the re-
ceived aerial tile and evaluates the presence of fire.
The aircraft requests images of the simulated camera
for every position of its trajectory and repeats this pro-
cess without ever knowing the ground truth of the fire
detection problem.
The generation of fire by the model is highly de-
pendent on the scenario its training has targeted. The
focus in this work lies in the particular synthesis of
fire for images of forests even though it can also be of
use for urban environments.
4 IMPLEMENTATION DETAILS
The Fire Module provides vehicles with camera simu-
lation and detection services. It was developed using
FastAPI, a high performance tool for building APIs
in Python, and its communication with The Platform
is performed using HTTP. The generation service is
reached using a GET request to ”/camera”, and its re-
sponse includes the synthetic aerial image, in JPEG
format, for the aircraft’s position. On the other end,
the detection service is reached using a POST request
to ”/detector”, whose body shall carry an image of
JPEG format as well. The API takes care of feeding
the image into the ERNet classification network and
returns a boolean regarding the presence of fire in it.
The camera simulator must therefore be capa-
ble of acquiring the aerial tiles corresponding to the
positions of the aircraft from a preestablished maps
API. Bing Maps REST Services
5
is developed by Mi-
crosoft and provides free licensing plans offering 125
thousand API requests a year and up to 50 thousand
within any 24-hour period, for educational purposes
(Microsoft, 2021). Apart from the traditional top-
down satellite imaging, 45
◦
angle aerial views resem-
bling captures taken by UAVs are also available in this
API and exerted much influence in its selection. Fig-
ure 7 portrays sample tiles of the two perspectives.
The CycleGAN network was trained for 110
epochs, following a learning rate of 0.0002 up to
epoch 100, from which it linearly decreased, and us-
5
More information at: https://docs.microsoft.com/en-
us/bingmaps/rest-services/
Aerial Fire Image Synthesis and Detection
277

Figure 7: Samples of satellite and bird’s eye perspectives,
as taken from Microsoft Bing Maps.
ing the Adam solver (β
1
= 0.5) as optimizer, as speci-
fied by default (Zhu et al., 2017). Also, taking advan-
tage of the fact that the Bing Maps service uses tiles
of size 256x256 pixels for rendering, the network’s
input size matches this value. The batch size is set
to 1 to enable very frequent parameter updates and it
is used with Instance Normalization layers, which are
recommended for styling transfer tasks (Huang and
Belongie, 2017).
The insertion of fires in the images is spatially
restricted, according to the evolution of the burning
area, and the procedure takes this factor into consider-
ation. Initially, the camera simulator performs the re-
quest of the aerial image for the desired location and
calculates the planar coordinates of the fire polygon
(as provided by the DM) on the image. For that, an
internal service of the Bing Maps API is used to draw
the polygon in the appropriate location, in an easily
identifiable color such as fuchsia and, as observed in
Fig. 8, it is then extracted using HSV segmentation.
Figure 8: Polygon extraction using an edge detection tech-
nique. The generation of a binary mask allows to extract the
polygonal coordinates of the designated fire region.
After translating the image collected from the ATP
to the fire domain, and having the binary mask of the
fire polygon, the Cut-and-Paste technique is applied
and the desired result is obtained. Observe the exam-
ple in Fig. 9. Note that the resulting image may or
may not contain fire features, even if one is occurring,
depending on the distance of the aircraft to the fire’s
location and the orientation of the camera in relation
to it, in the case of bird’s eye perspective.
In order to disguise discontinuities created by this
technique, the Poisson blending method (P
´
erez et al.,
2003) was implemented. The results generated were
more realistic yet much more discrete. Figure 10
Figure 9: Example of applying the Cut-and-Paste technique
for a fire polygon. The binary mask allows to select the pix-
els from the first image belonging to the desired fire region.
They are then superimposed on the original image.
portrays an image sample with a simple superimpo-
sition of the fire polygon and the respective image
when mixed seamless cloning is applied. This solu-
tion combines the gradients of the original image with
those of the fire polygon to form the blended region
of interest.
Figure 10: Sample image with a simple fire polygon overlay
and a sample image subject to mixed seamless cloning.
At the same time, the fact that no smoke emerges
from the fire polygon is odd. Looking for a solution
to recreate this behaviour, we noticed that fires in con-
fined indoor spaces are better documented as the num-
ber of variables to assess is smaller when in compari-
son to fires in the open. In that type of closed environ-
ment, the energy released by fires is characterised by
four steps: Incipient, Growth, Fully Developed and
Decay stages, as seen in Fig. 11 (Hartin, 2008).
Figure 11: Stages of fire development in a compartment
(Hartin, 2008).
For lack of better judgement, the method we
implemented for calculating the size of the smoke
columns follows a na
¨
ıve approach where the energy
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
278

release, in each iteration of the fire front, is directly
proportional to the size of its smoke columns. We de-
cided that they would initially grow at a constant rate
for two iterations, stay in the fully-developed phase
for one iteration, and decay for over the last four it-
erations of the simulation, from which the fire is ex-
tinguished. Using an exclusively manual procedure,
smoke vectors collected by web scraping were re-
sized and blended into the image with the fire fea-
tures. These were displayed in varying shades of grey
and assuming the direction of the wind obtained di-
rectly from the simulator. Figure 12 presents a se-
quence of tiles representing a terrain with fire and the
respective smoke progression.
Figure 12: Example of smoke progression during a simu-
lated fire. The direction of the smoke columns is that of
the wind provided by the simulator, while their sizes vary
according to the respective fire stage.
Each tile represents an iteration of the generation
pipeline, meaning that the speed of smoke simulation
is directly proportional to the the cadence of requests
made to the API. For a certain tile the smoke columns
are also considered to be subject to the same wind
intensity and direction. This is an approximation to
what happens in reality because, as is well known,
fires can tamper with local environmental conditions,
and it is hardly viable to take into account the actual
wind behaviour for this specific scenario.
4.1 Experiments using Coherent
Semantic Attention
The image painting strategy indicates, although there
is yet no scientific evidence, that there should be a
possibility of filling the unknown regions of a non-
fire image with flame and smoke features, as a human
painter would. This assumption led to experiments
that produced detailed textures and whose insertion
generated little to no discontinuity. It was also ob-
served that the application of red filters on the images
directly influences the amount of flames produced,
which allows to increase their variability. Figure 13
reveals some of the results. The top row depicts the
original aerial images layered with a red filter and the
respective fire polygons, in gray, while the bottom
row depicts the same polygons filled with the flames
and smoke features.
Figure 13: Samples of fire generation using CSA for images
with overlay red filters and random polygonal masks. The
respective results are portrayed in the bottom row.
Although appealing, this method was disregarded
because the generation for large masks is unfeasible.
More specifically, in this scenario, it is hardly possi-
ble to recreate the key features of the original images,
which end up being stripped from their own context.
5 VALIDATION AND RESULTS
The generated fire images were evaluated according
to their degree of realism, quantitatively using qual-
ity and image similarity metrics, and qualitatively by
subjective and manual analysis. The adaptation of a
model for fire detection, proven to be good in the real
domain, also allows assessing the good performance
of the synthetic generation model.
5.1 Synthetic Image Quality
The Fr
´
echet Inception Distance (FID) allows assess-
ing the degree of quality and similarity between the
images created by the generation model and the real
fire images (Heusel et al., 2017). It is based on the
activations of the penultimate layer of the pre-trained
InceptionV3 network and it evaluates the distance be-
tween the Gaussian distributions of the two sets of
images. The FID scores, depicted in Fig. 14 for the
last five training iterations, depict a minimum value
of 42.0 which is part of a decreasing trend. Since the
lower the FID score, the better the image quality, we
may conclude that the generator is producing increas-
Aerial Fire Image Synthesis and Detection
279
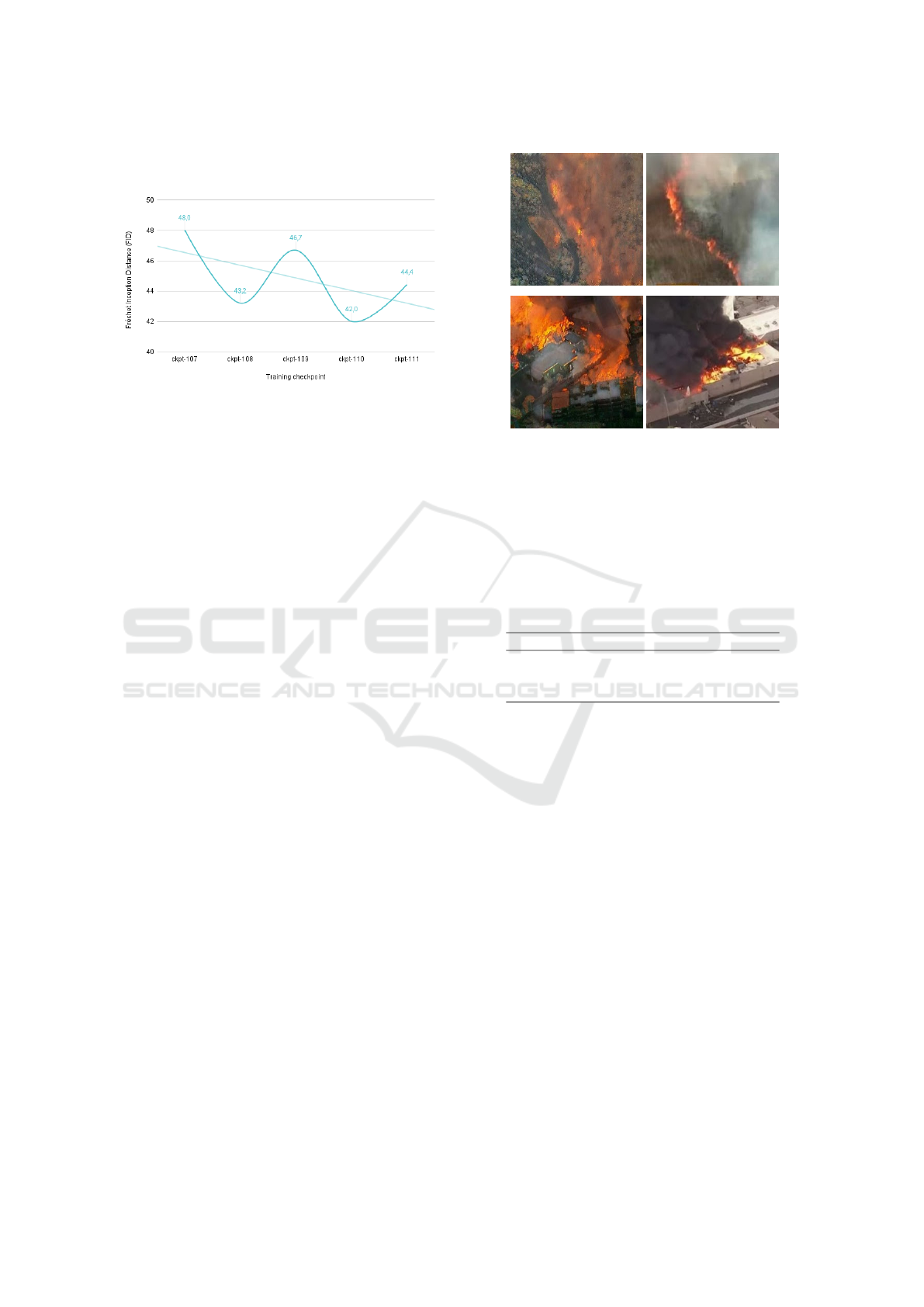
ingly more realistic images and with fewer artefacts
(noise, blur and distortions).
Figure 14: The Fr
´
echet Inception Distance (FID) scores for
the last five training iterations of the fire generator depict a
declining trend.
Nevertheless, the most used metric to evaluate
the results of the generative networks still relies on
the subjective opinion of individuals, comparing real
samples with fictitious ones, in Preference Judgement
Surveys (Borji, 2019). For that purpose we developed
a survey with a medium set of 40 generated fire im-
ages, carefully collected to hold 10 samples of forest
and urban scenarios, both of top-down and bird’s eye
perspectives. We afterwards asked the respondents
to indicate their preference in relation to the scenario
and image perspective, and requested the identifica-
tion of generation anomalies. Considering the rela-
tively small population size, and for results to be ro-
bust and more representative of reality, all image sam-
ples were chosen at random for each of the previous
questions. The exception to this lies on the final ques-
tion, in which we decided to test the users’ perception
of reality. It consisted on the identification of gener-
ated samples when these were presented next to a real
one, in an environment of similar configuration. The
images we specifically selected for this case study are
depicted in Fig. 15.
The survey was disseminated by the community
and 122 responses were obtained. On a scale of 1 to
5, the subjects considered the images to have a me-
dian value (Mdn) of 4 when it comes to their degree
of realism, with ratings presenting a mean value (M)
of 3.44 and a standard deviation (SD) of 1.16. The
generated image of forest fire approximated its real
counterpart well but it was identified without much
effort, managing to mislead over 12.3% of the pop-
ulation. The corresponding question targeting urban
images deceived people similarly, with a 11.5% fail-
ure rate, but falls a bit short in its approximation to
the real counterpart, exhibiting a lower M and higher
SD. The population diverged more while providing
their opinion on images of urban scenarios, which is
Figure 15: Two pairs of generated and real fire image sam-
ples, respectively. The top row depicts a forest scenario,
while the bottom row depicts an urban scenario.
explained by a greater instability of the network for
that same type of environment. Table 1 presents a
summary of the statistics previously enumerated.
Table 1: Degree of realism of the generated fire images,
evaluated on a scale of 1 to 5. Mdn, M and SD represent the
median, the mean and the standard deviation values.
Mdn M SD
Degree of realism (Overall) 4 3.44 1.159
Approximation (Forest) 4 3.52 0.893
Approximation (Urban) 3 2.98 1.064
We conclude that the images are of good quality
and there is a particular preference for the ones gen-
erated for forest scenarios, which would be expected.
On the other hand, the preference for bird’s eye per-
spective over top-down perspective is not notorious.
Interestingly, the respondents were only 3.6% more
prone to select forestry image, of both top-down and
bird’s eye perspectives, than to select urban imagery.
At the same time, they were also just 3% more con-
fident that the images of top-down perspective were
more realistic than the ones of bird’s eye perspec-
tive. The difficulty respondents have had in making
up their mind leads one to believe that, contrary to
what one might have thought, the images from dif-
ferent scenarios and perspectives present a similar de-
gree of quality and realism.
The generation anomalies identified concern
mainly the lack of texture detail and distortions
caused by exacerbated saturation levels or by the pres-
ence of artefacts such as noise. Also, some subjects
expected a higher diversity of flames and smoke fea-
tures and a higher image resolution, which they con-
sidered to have negatively impacted their assessment.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
280
5.2 Fire Detection Performance
It was observed that the classification model main-
tains its original performance when facing the syn-
thetic fire images. To test it, 876 aerial fire images
were generated, both of urban and forest environ-
ments in the greater metropolitan areas of 4 cities,
from Europe and California, in the United States.
The model reported an accuracy of 90.2% and a
false positive rate of only 4.5%. Precision and recall
tend to be inversely proportional to one another, that
is, the increase of one usually implies the decrease
of the other. This phenomenon occurred in this case,
where for fire images the precision (94.9%) is higher
than the recall (84,9%), trend that is reversed for non-
fire images, where the precision (86.4%) is smaller
than the recall (95.4%). The F1-score presents the
harmonic mean between precision and recall and is
useful to evaluate models when there is some imbal-
ance in the class distribution. For the present case the
F1-score is highly valued too, at 91.5%.
Another metric is the Area Under Curve (AUC),
which measures the ability of the model to distinguish
between the positive and the negative class based on
the Receiver Operator Characteristic (ROC) curve,
plotted using the true positive and false positive rates
at various thresholds. The higher the value of AUC,
comprised between 0 and 1, the better the classifier is
able to distinguish between class samples and the bet-
ter its predictive power. The current classifier is close
to perfect at identifying the synthetic fire class, with
an AUC of 94.8%.
Table 2 summarizes the results for the previously
mentioned metrics.
Table 2: Classification metrics of the fire detector.
Class Accuracy Precision Recall F1-score AUC
NoFire
0.902
0.864 0.954 0.907
0.948
Fire 0.949 0.849 0.896
Mean 0.902 0.916 0.915 0.915 0.948
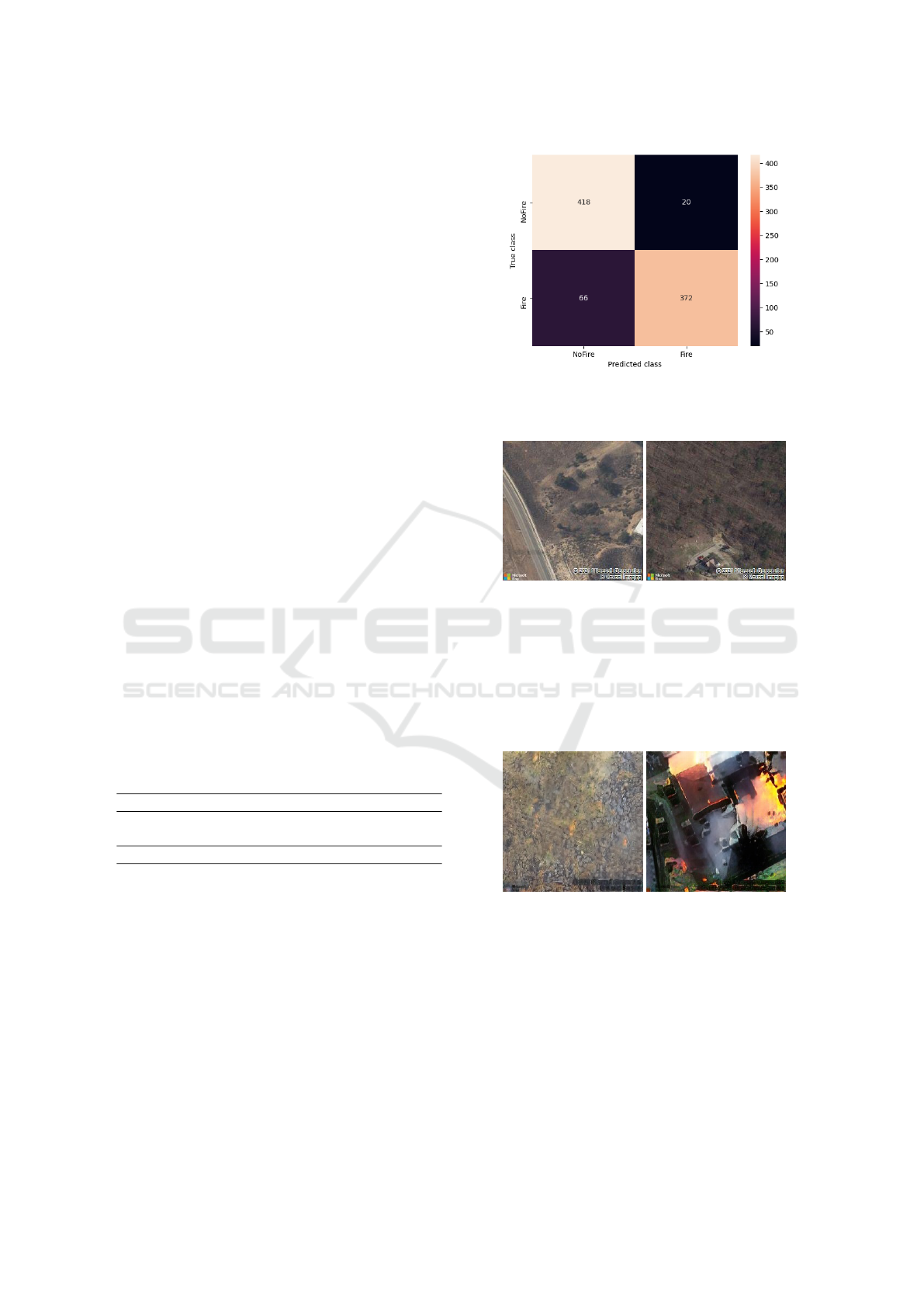
The confusion matrix of Fig. 16 shows, however,
some discrepancy between the number of false nega-
tives and false positives detected by the model. The
first represent more than 15% of predictions, while
the last only account for 4.5%.
After carefully analysing the constitution of each
set, one comes to the conclusion that false positives
are found to only contain images of forests, most
of lower quality, as acquired from the external tiles
provider, and being of bird’s eye perspective. That
may denote some overfitting of the model. Observe
two false positive examples in Fig. 17.
On the other hand, false negative samples are
mostly comprised of images of forestry with under-
Figure 16: Confusion matrix of the fire detector on images
of the validation dataset. False negatives and false positives
account for 15% and 4.5% of predictions, respectively.
Figure 17: False positive fire samples.
growth and scattered vegetation, in which the gener-
ator tends to create undesired noise and blurring arti-
facts, vestigial columns of smoke but fails to generate
flames. Some fire samples of urban scenarios suffer-
ing from color distortions are also wrongly classified
by the model. Figure 18 displays one image sample
representative of each case.
Figure 18: False negative fire samples.
The fact that the perspective of training images
was variable brings some entropy to the ability of both
the image generation and classification models. Fire
detection in urban scenarios tends to portray worse re-
sults since the training of the generator was primarily
focused on forest environments.
5.3 Performance Assessment
The processing time of the generation and detection
pipeline is, at this stage, inherently dependent on the
Aerial Fire Image Synthesis and Detection
281

generation process which, in turn, has a strong con-
nection to the Bing Maps API. The servers’ response
time strongly affects the rate at which tiles can be pro-
vided to vehicles on a mission and, as a consequence,
it has not been possible to simulate a camera as in
a real-time scenario of 25 FPS. This would require
a constant low latency connection to the Bing Maps
servers and less restrictive measures to enable a larger
number of requests for a given time interval.
We registered pipeline iterations of over 10 vehi-
cle simulations using a camera of bird’s eye perspec-
tive. With this configuration, the Camera Simulator
requests two tiles to the Bing Maps API, for each ve-
hicle’s position. One is the original aerial tile, the
other is similar but includes the fire polygon drawn
on its appropriate location, should it exist on that im-
age. The respective requests are summarized in the
plots of Fig. 19. Note that the API was running with-
out GPU in order to better approximate the behaviour
of a machine with low computational resources.
Figure 19: The processing time for the generation and de-
tection requests reveal that the real-time bottleneck lies on
the generation procedure.
In this plot we observe that the API is able to re-
turn at least an aerial tile every second for 50% of the
collected request samples. The majority of these tiles
do not contain features of fire, either because the vehi-
cle’s camera is not close enough to the burning area or
because its orientation does not allow it to capture that
region. This case, where the camera does not generate
synthetic fire, constitutes the fastest response scenario
for the vehicle and it still comprises about a second of
tile fetching, rendering inadequate the realistic cam-
era simulation and limiting the camera to a maximum
of 1 FPS right from the start. In order to prevent over-
flowing the external Fire Module API with pending
requests, especially when it comes to generating a se-
quence of fire tiles, the time interval between requests
has been carefully set to 3 seconds.
The detection performance complies, on the other
hand, with a scenario closer to real-time, averaging
100 ms per Vehicle Agent request at the same ex-
periments, with as little as 30 ms of SD. Reducing
the generation bottleneck would, according to these
metrics, make it possible for the pipeline to run at
around 10 FPS in the simulation environment, which
is more acceptable. In reality, because a real aircraft
would not need to simulate its own camera, the de-
tector would be achieving over 50 FPS and consum-
ing no more than 300 KB of memory. Therefore, it
gathers all conditions necessary to run autonomously
aboard an embedded system of low memory and stor-
age resources (Kyrkou and Theocharides, 2019).
6 CONCLUSIONS AND FUTURE
WORK
The models that are currently the reference in what
concerns fire detection highlight a widespread prob-
lem which has been affecting their performance, the
imbalance of classes in the training data, since there
is a very small number of fire images, especially of an
aerial perspective.
The generation of features of flames and smoke
in images of aerial perspective is performed for the
complete image, using a ResNet generator trained on
image-to-image translation using the CycleGAN ar-
chitecture. These are afterwards blended into the orig-
inal image using the Cut-and-Paste technique in order
to match them to the location of the burning region.
The similarity between generated and real images
was assessed using the Fr
´
echet Inception Distance.
The declining trend of this metric, during training, de-
noted a gradual improvement of the generator, which
produces images with increasingly less noise, blur
and distortion. In addition, a group of 122 respon-
dents to the conducted survey willingly provided their
subjective opinion to evaluate the generated images
qualitatively. These were considered of good quality,
with a median realism of 4 out of 5, and proved to ap-
proximate images of forests better than those of urban
environments, as initially intended and expected.
On the other hand, ERNet is a lightweight model
designed to perform disaster detections in real-time,
with good accuracy and low false positive rates on
UAVs and similar CPU-based machines. It was
adapted to perform binary classification on the exis-
tence of fire on the aerial images provided by the ve-
hicles of The Platform. Not only did the detector man-
age to process requests in under 100 ms, but reached
a high accuracy of 90.2% and confirmed the very low
rates of false positives pledged by the original imple-
mentation, this time using generated images of fire.
The false negatives accounted for 15.1% of cases and
corresponded mainly to images of sparsely vegetated
forest and urban scenarios with color distortions. The
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
282

false positives accounted for just 4.5% of predictions
and contained only images of forest, most of them of
low quality, which may evidence some overfitting of
the detection model. Yet, given its AUC of 94.8%,
we conclude that the model is able to identify very
well the generated images of synthetic fire, further re-
inforcing the quality of the generator.
Integrated into the simulation platform, this mod-
ule raises a number of questions, in particular con-
cerning the generation procedure, because it is com-
putationally more expensive than detection. An equi-
librium was found to ensure its usability, but more can
be done to improve it.
The implemented Fire Module interoperates with
the external Bing Maps REST Services by means
of HTTP requests. This communication may suffer
from overheads, mostly because of the variable la-
tency with the respective servers, which may also be
overloaded and thus subject to longer response times.
To tackle this problem it is essential to reduce the
number of requests issued by creating caches to hold
tiles of frequently used routes or by acquiring tiles
of larger resolutions. The latter cover a larger surface
area which can be segmented in order to match the on-
board camera’s field of view at the aircraft’s position.
Prefetching, a mechanism where tiles are retrieved in
advance according to the predefined trajectory, could
also prove beneficial.
The insertion of fire into bird’s eye type of frames
is currently subject to an internal functionality of the
Bing Maps API which allows to perform the drawing
of polygons on demand to be thereafter manually ex-
tracted. This implies that every drawing on the bird’s
eye perspective corresponds to an additional request
to the external tiles provider, which is unfeasible. This
issue should be resolved and considered for all other
solutions that are subsequently integrated.
Since image generation proved to perform differ-
ently according to the environment, further develop-
ments could also separate the classification task into
two specific models, training one of them on forestry
while the other is trained on urban scenarios.
The incorporated lightweight detector based on
ERNet portrays very promising results and opens up
the opportunity to generalise the pipeline concept to
other types of disturbances. It should help to identify,
for example, building collapses, floods or traffic in-
cidents already targeted by the detector. This would
enable the comparison of different multi-vehicular ap-
proaches and help acquiring a deeper understanding
on which works best for each case. One could there-
fore invest in studying the catastrophic scenarios from
the air in order to define a sequence of priority actions
to be carried out by the formation of aircraft.
REFERENCES
Almeida, J. (2017). Simulation and Management of Envi-
ronmental Disturbances in Flight Simulator X. Mas-
ter’s thesis, University of Porto, Faculty of Engineer-
ing, Porto, Portugal.
Arcidiacono, C. (2018). An empirical study on syn-
thetic image generation techniques for object detec-
tors. Master’s thesis, KTH, School of Electrical En-
gineering and Computer Science (EECS), Stockholm,
Sweden.
Borji, A. (2019). Pros and cons of GAN evaluation mea-
sures. Computer Vision and Image Understanding,
179:41–65. DOI:10.1016/j.cviu.2018.10.009.
Damasceno, R. (2020). Co-Simulation Architecture for En-
vironmental Disturbances. Master’s thesis, University
of Porto, Faculty of Engineering, Porto, Portugal.
Dwibedi, D., Misra, I., and Hebert, M. (2017). Cut, Paste
and Learn: Surprisingly Easy Synthesis for Instance
Detection. In Proceedings of 2017 IEEE Interna-
tional Conference on Computer Vision (ICCV), pages
1310–1319, Venice, Italy. IEEE Computer Society.
DOI:10.1109/ICCV.2017.146.
El Harrouss, O., Almaadeed, N., Al-ma’adeed, S., and
Akbari, Y. (2020). Image Inpainting: A Re-
view. Neural Processing Letters, 51:2007–2028.
DOI:10.1007/s11063-019-10163-0.
Filippi, J. B., Bosseur, F., and Grandi, D. (2014). Fore-
Fire: open-source code for wildland fire spread mod-
els, pages 275–282. Advances in Forest Fire Research.
Imprensa da Universidade de Coimbra, Coimbra, Por-
tugal. DOI:10.14195/978-989-26-0884-6 29.
Goodfellow, I. J., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A., and Ben-
gio, Y. (2014). Generative Adversarial Nets. In
Proceedings of The 27th International Conference on
Neural Information Processing Systems - Volume 2,
NIPS’14, page 2672–2680, Montreal, Canada. MIT
Press. DOI:10.1145/3422622.
Hartin, E. (2008). Fire Development and Fire Behavior In-
dicators. Technical report, Compartment Fire Behav-
ior Training.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep
Residual Learning for Image Recognition. In Pro-
ceedings of 2016 IEEE Conference on Computer Vi-
sion and Pattern Recognition (CVPR), pages 770–
778, Las Vegas, Nevada, USA. IEEE Computer So-
ciety. DOI:10.1109/CVPR.2016.90.
Heusel, M., Ramsauer, H., Unterthiner, T., Nessler, B., and
Hochreiter, S. (2017). GANs Trained by a Two Time-
Scale Update Rule Converge to a Local Nash Equilib-
rium. In Proceedings of the 31st International Con-
ference on Neural Information Processing Systems,
NIPS’17, page 6629–6640, Long Beach, California,
USA. Curran Associates Inc.
Hollosi, J. and Ballagi, A. (2019). Training Neu-
ral Networks with Computer Generated Images.
In Proceedings of 2019 IEEE 15th International
Scientific Conference on Informatics, pages 155–
160, Poprad, Slovakia. IEEE Computer Society.
DOI:10.1109/Informatics47936.2019.9119273.
Aerial Fire Image Synthesis and Detection
283

Huang, G., Liu, Z., Van Der Maaten, L., and Weinberger,
K. Q. (2017). Densely Connected Convolutional Net-
works. In Proceedings of 2017 IEEE Conference on
Computer Vision and Pattern Recognition (CVPR),
pages 2261–2269, Honolulu, Hawaii, USA. IEEE
Computer Society. DOI:10.1109/CVPR.2017.243.
Huang, X. and Belongie, S. (2017). Arbitrary Style
Transfer in Real-time with Adaptive Instance Nor-
malization. In Proceedings of 2017 IEEE Interna-
tional Conference on Computer Vision (ICCV), pages
1510–1519, Venice, Italy. IEEE Computer Society.
DOI:10.1109/ICCV.2017.167.
Kyrkou, C. and Theocharides, T. (2019). Deep-Learning-
Based Aerial Image Classification for Emergency
Response Applications Using Unmanned Aerial Ve-
hicles. In Proceedings of 2019 IEEE/CVF Con-
ference on Computer Vision and Pattern Recogni-
tion Workshops (CVPRW), pages 517–525, Long
Beach, California, USA. IEEE Computer Society.
DOI:10.1109/CVPRW.2019.00077.
Liu, H., Jiang, B., Xiao, Y., and Yang, C. (2019).
Coherent Semantic Attention for Image Inpaint-
ing. In Proceedings of 2019 IEEE/CVF Interna-
tional Conference on Computer Vision (ICCV), pages
4169–4178, Seoul, Korea. IEEE Computer Society.
DOI:10.1109/ICCV.2019.00427.
Microsoft (2021). Bing Maps Licensing. Online: https://
www.microsoft.com/en-us/maps/licensing. (accessed
2021-02-11).
MographPlus (2018). Corona for 3ds Max — Ren-
dering Smoke, Fire and Explosions — Tutorial
#113. Online: https://www.youtube.com/watch?v=
DYTDNGqvPUw. (accessed 2021-11-23).
Park, M., Tran, D. Q., Jung, D., and Park, S.
(2020). Wildfire-Detection Method Using DenseNet
and CycleGAN Data Augmentation-Based Remote
Camera Imagery. Remote Sensing, 12(22):3715.
DOI:10.3390/rs12223715.
P
´
erez, P., Gangnet, M., and Blake, A. (2003). Poisson Im-
age Editing. ACM Transactions on Graphics - TOG,
22(3):313–318. DOI:10.1145/882262.882269.
PORDATA (2020). Forest fires and burn area.
Online: https://www.pordata.pt/Europa/Incłndios+
florestais+e+rea+ardida-1374. (accessed 2021-01-
27).
Rother, C., Kolmogorov, V., and Blake, A. (2004).
”GrabCut”: Interactive Foreground Extrac-
tion Using Iterated Graph Cuts. ACM Trans-
actions on Graphics - TOG, 23(3):309–314.
DOI:10.1145/1015706.1015720.
Silva, D. C. (2011). Cooperative multi-robot missions : de-
velopment of a platform and a specification language.
PhD thesis, University of Porto, Faculty of Engineer-
ing, Porto, Portugal.
Silva, T. (2017). A Short Introduction to Generative Ad-
versarial Networks. Online: https://sthalles.github.io/
intro-to-gans/. (accessed 2020-12-16).
Simonyan, K. and Zisserman, A. (2015). Very Deep Con-
volutional Networks for Large-Scale Image Recogni-
tion. In Proceedings of The 3rd International Confer-
ence on Learning Representations (ICLR), San Diego,
California, USA. arXiv: 1409.1556 [cs.CV].
Tripathi, S., Chandra, S., Agrawal, A., Tyagi, A., Rehg,
J. M., and Chari, V. (2019). Learning to Gener-
ate Synthetic Data via Compositing. In Proceed-
ings of 2019 IEEE/CVF Conference on Computer Vi-
sion and Pattern Recognition (CVPR), pages 461–
470, Long Beach, California, USA. IEEE Computer
Society. DOI:10.1109/CVPR.2019.00055.
Turco, M., Jerez, S., Augusto, S., Tar
´
ın-Carrasco, P., Ra-
tola, N., Jim
´
enez-Guerrero, P., and Trigo, R. M.
(2019). Climate drivers of the 2017 devastating
fires in Portugal. Scientific Reports, 9:13886. DOI:
10.1038/s41598-019-50281-2.
WMO (2021). WMO Atlas of Mortality and Economic
Losses from Weather, Climate and Water Extremes
(1970–2019). Technical Report WMO- No. 1267,
World Meteorological Organization. ISBN: 978-92-
63-11267-5.
Wong, M. Z., Kunii, K., Baylis, M., Ong, W. H., Kroupa,
P., and Koller, S. (2019). Synthetic dataset gen-
eration for object-to-model deep learning in indus-
trial applications. PeerJ Computer Science, 5:e222.
DOI:10.7717/peerj-cs.222.
Zhu, J., Park, T., Isola, P., and Efros, A. A. (2017). Unpaired
Image-to-Image Translation Using Cycle-Consistent
Adversarial Networks. In Proceedings of 2017 IEEE
International Conference on Computer Vision (ICCV),
pages 2242–2251, Venice, Italy. IEEE Computer So-
ciety. DOI:10.1109/ICCV.2017.244.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
284
