
Reinforcement Learning Guided by Provable Normative Compliance
Emery A. Neufeld
a
Faculty of Informatics, Vienna, Austria
Keywords:
Reinforcement Learning, Ethical AI, Deontic Logic.
Abstract:
Reinforcement learning (RL) has shown promise as a tool for engineering safe, ethical, or legal behaviour
in autonomous agents. Its use typically relies on assigning punishments to state-action pairs that constitute
unsafe or unethical choices. Despite this assignment being a crucial step in this approach, however, there has
been limited discussion on generalizing the process of selecting punishments and deciding where to apply
them. In this paper, we adopt an approach that leverages an existing framework – the normative supervisor of
(Neufeld et al., 2021) – during training. This normative supervisor is used to dynamically translate states and
the applicable normative system into defeasible deontic logic theories, feed these theories to a theorem prover,
and use the conclusions derived to decide whether or not to assign a punishment to the agent. We use multi-
objective RL (MORL) to balance the ethical objective of avoiding violations with a non-ethical objective; we
will demonstrate that our approach works for a multiplicity of MORL techniques, and show that it is effective
regardless of the magnitude of the punishment we assign.
1 INTRODUCTION
An increasing amount of attention is being devoted
to the design and implementation of ethical and safe
autonomous agents. Among this growing body of
research are multiple approaches adapting reinforce-
ment learning (RL) methods to learn compliance with
ethical standards. (Rodriguez-Soto et al., 2021) notes
that these approaches can be split into two main tasks:
reward specification (the encoding of ethical informa-
tion into a reward function) and ethical embedding
(incorporating rewards into the agent’s learning en-
vironment). In (Rodriguez-Soto et al., 2021), the au-
thors focus on the latter; here, we will more closely
work with the former. We can identify two essen-
tial challenges with reward specification: we must de-
cide (1) when to assign rewards or punishments to the
agent, and (2) what their magnitude should be. In this
paper, we address these challenges through a mecha-
nism for identifying, and assigning punishments for,
behaviours that do not comply with a given ethical or
legal framework presented as a normative system.
The typical approach to teaching RL agents safe
or ethical behaviour is to assign punishments to non-
compliant state-action pairs, but this will not always
be a simple matter, in the context of a large or com-
plex normative system. Our approach is to model the
a
https://orcid.org/0000-0001-5998-3273
normative system with a formal language tailored to
representing and deriving conclusions from such sys-
tems, and use a theorem prover to check if a state-
action pair is compliant with the system. If it is not,
a punishment is incurred by the agent. The medium
through which we automate this process is a norma-
tive supervisor.
In (Neufeld et al., 2021), a normative supervisor
for RL agents employing a defeasible deontic logic
theorem prover is introduced to address the chal-
lenge of facilitating transparent normative reasoning
in learning agents. This external module works by fil-
tering out non-compliant actions, allowing the agent
to choose the best action out of all compliant actions;
if there are no compliant actions, the supervisor pos-
sesses a “lesser evil” submodule that can score actions
based on how much of the normative system they vio-
late, allowing the supervisor to recommend only min-
imally non-compliant actions to the agent. In this pa-
per, we describe how the supervisor can be used to
evaluate the compliance of a given action, allowing
the supervisor to guide the agent more indirectly, by
simply evaluating the agent’s actions instead of re-
stricting them, providing feedback rather than instruc-
tions. This feedback will come in the form of pun-
ishments for a reinforcement learning agent, which
we will show are effective in molding the agent’s
behaviour regardless of their magnitude. We adopt
444
Neufeld, E.
Reinforcement Learning Guided by Provable Normative Compliance.
DOI: 10.5220/0010835600003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 3, pages 444-453
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

multi-objective reinforcement learning (MORL) as a
framework for learning policies that accomplish both
the agent’s original goal and its compliance to a nor-
mative system, as discussed in in (Vamplew et al.,
2018) and (Rodriguez-Soto et al., 2021).
We demonstrate the efficacy of this approach on
an RL agent learning to play a variation of the
game Pac-Man. We employ the “Vegan Pac-Man”
case study utilized in (Noothigattu et al., 2019) and
(Neufeld et al., 2021), adapting it into a more com-
plex normative system that characterizes a concept
of “benevolence” for Pac-Man and mandates adher-
ence to it. Our results show that our more complex
formulation manifests in the same behaviour as the
“vegan” Pac-Man from the above papers – a version
of the game where Pac-Man is forbidden from eating
ghosts, even though doing so would increase its score
in the game, thus creating two competing objectives,
one ethical, and one unethical.
We engineer this desired behaviour with two ap-
proaches to single-policy MORL: the linear scalar-
ization MORL approach used in (Rodriguez-Soto
et al., 2021), and the ranked MORL first presented in
(G
´
abor et al., 1998) and later simplified in (Vamplew
et al., 2011) as thresholded lexicographic Q-learning
(TLQ-learning). Our results show these two tech-
niques producing the same optimal policy.
1.1 Related Work
There is a wealth of research on safe RL. Among
this research are several logic-based frameworks. Us-
ing linear temporal logic (LTL) specifications to con-
strain an agent’s actions is one of the most common
approaches. For instance, in (Alshiekh et al., 2018)
and (Jansen et al., 2020), a shield is synthesized from
LTL specifications and abstractions of the environ-
ment, which prevents the agent from moving into un-
safe states. In (Hasanbeig et al., 2019), (Hasanbeig
et al., 2019), and (Hasanbeig et al., 2020) the authors
translate LTL specifications into automata and learn
a policy based on a reward function defined by the
non-accepting states of the automata. In (Kasenberg
and Scheutz, 2018), LTL specifications are similarly
translated into automata which are tailored for direct
conflict resolution between specifications. (Kasen-
berg and Scheutz, 2018) is the only one of these ap-
proaches that explicitly addresses normative reason-
ing, and it restricts itself to solving direct conflicts
between strictly weighted prescriptive norms. Other
subtleties of normative reasoning are not so simple to
represent with LTL; LTL is ideal for straightforward
safety constraints, but less well suited for legal or eth-
ical norms (Governatori and Hashmi, 2015).
Nevertheless, RL is not an uncommon way to ad-
dress the learning of ethical behaviour in autonomous
agents. Many examples of this have popped up
in recent years, such as the framework outlined in
(Abel et al., 2016), the reward-shaping approach in
(Wu and Lin, 2018), or the MORL with contextual
multi-armed bandits presented in (Noothigattu et al.,
2019) and (Balakrishnan et al., 2019). More recently,
(Rodriguez-Soto et al., 2021) used an “ethical multi-
objective Markov decision process” to design an eth-
ical environment for teaching an agent ethical be-
haviour. While all the above approaches to ethically-
compliant agents include assigning rewards and pun-
ishments to the actions taken by an agent in order to
induce compliant behaviour, there is limited discus-
sion as to how or why the rewards are assigned where
they are. Additionally, in work focusing on reinforce-
ment learning, there has been a lack of consideration
that the agent may not be subject to simple constraints
on behaviour. It may not be immediately obvious
what situations are compliant with a normative sys-
tem and which are not; often we require contextual
definitions within the relevant normative systems, and
we may not be able to give an exhaustive description
of all instances that qualify as non-compliant.
2 BACKGROUND
In this section we review some background topics that
will be necessary building blocks of our approach to
learning compliant behaviour.
2.1 Multi-objective Reinforcement
Learning
The underlying environment of a reinforcement learn-
ing problem is formalized as a Markov decision pro-
cess (MDP), defined below:
Definition 2.1. An MDP is a tuple
hS, A,R,Pi
where S is a set of states, A is a set of actions,
R : S × A → R is a scalar reward function over states
and actions, and P : S × A× S → [0,1] is a probability
function that gives the probability P(s,a, s
0
) of transi-
tioning from state s to state s
0
after performing action
a.
The goal of reinforcement learning is to find a pol-
icy π : S → A which designates optimal behaviour;
this optimality is determined with respect to a value
Reinforcement Learning Guided by Provable Normative Compliance
445

function defined as:
V
π
(s) = E
"
∞
∑
t=0
γ
t
r
i+t+1
|s
i
= s
#
which represents the expected accumulated value on-
ward from state s if policy π is followed. In the above
function, r
t
is the reward earned from the reward func-
tion R at timestep t and γ ∈ [0, 1] is a discount factor
(so that rewards in the future do not have as much
weight as the current reward). We can similarly de-
fine a Q-function:
Q
π
(s,a) = E
"
∞
∑
t=0
γ
t
r
i+t+1
|s
i
= s,a
i
= a
#
which predicts the expected cumulative reward from
R given that the agent is in state s taking action a.
The goal of RL, then, is to find an optimal policy
π
∗
such that
V
π
∗
(s) = max
π∈Π
V
π
(s)
where Π is the set of all policies over the MDP. This
is accomplished by learning a Q-function such that
π
∗
(s) ∈ argmax
a∈A
Q(s,a).
Multi-objective RL (MORL) differs from regular
RL only in that instead of learning over an MDP, we
want to learn over a multi-objective MDP (MOMDP);
an MDP that has instead of a single reward function
R, a vector of reward functions
~
R = (R
1
,..., R
n
)
T
, each
corresponding to a different objective, and therefore a
different value function. There are a plethora of meth-
ods for choosing an action in the presence of com-
peting objectives, two of which will be discussed in
Sect. 3.1 and 3.2
2.2 Normative Reasoning
In this paper our goal is to influence the learning of an
agent with normative reasoning. Normative reasoning
differs from classical logical reasoning in that its fo-
cus is not only on the truth or falsity of a given state-
ment, but also the application of the modality of obli-
gation – and the related modalities of permission and
prohibition – to it. Normative reasoning introduces
challenging dynamics that cannot be effectively cap-
tured by classical logic. There is debate as to the na-
ture of these dynamics and what tools can or should be
used to model them (Broersen et al., 2013); suggested
crucial characteristics of normative reasoning include
the capability to represent both constitutive and regu-
lative norms and defeasibility (Palmirani et al., 2011).
As noted above, normative reasoning often entails
dealing with two types of norms: constitutive and reg-
ulative norms (see (Boella and van der Torre, 2004)).
Regulative norms describe the obligations, prohibi-
tions and permissions an agent is subject to. Typi-
cally, these are represented as: O(p|q) (p is oblig-
atory when q), F(p|q) (p is forbidden when q), and
P(p|q) (p is strongly permissible when q). Prohibi-
tion can be seen as merely the obligation of a negative,
i.e., F(p|q) ≡ O(¬p|q), and strong permission occurs
when we express the permissiveness of an action ex-
plicitly, and this explicit permission overrides the pro-
hibition of such an action. In other words, strong per-
missions work as exceptions to prohibitions and obli-
gations – this is one place where the defeasibility con-
dition mentioned in the above paragraph comes in.
On the other hand, constitutive norms typically
take the form “in context c, concept A counts as con-
cept B” (Jones and Sergot, 1996), where A generally
refers to a more concrete concept (e.g., turning right)
and B to a more abstract one (e.g., proceeding). When
we have a constitutive norm that informs us that x
counts as y, we will here denote it as C(x,y). Con-
stitutive norms can be used to define more complex
concepts like “safety” or “benevolence” within a spe-
cific normative system:
Definition 2.2. A normative system is a tuple N =
hC ,R , >i where C is a set of constitutive norms, R
is a set of regulative norms, and > is a priority re-
lation that resolves conflicts between norms, should
they exist.
Below, we describe a formal language that can
model the dynamics of such normative systems.
2.2.1 Defeasible Deontic Logic
Defeasible deontic logic (DDL) is a computation-
ally feasible, albeit expressive logic that addresses the
challenges with normative reasoning discussed above.
DDL facilitates reasoning over literals (proposi-
tional atoms p and their negations ¬p), modal liter-
als (literals subject to a modality, for example obli-
gation O(p)), and rules defined over them. Rules
can be strict (→), defeasible (⇒), or defeaters ( ).
In strict rules, the consequent strictly follows from
the antecedent without exception, whereas the con-
sequents of defeasible rules typically follow from the
antecedent, unless there is evidence to the contrary.
This evidence can come in the form of conflicting
rules or defeaters, which cannot be used to derive a
conclusion; rather, they prevent a conclusion from be-
ing reached by a defeasible rule. Rules can be consti-
tutive (bearing the subscript C) or regulative (bearing
the subscript O)
To provide the examples of the above types of
rules, consider the constitutive norm C(x, y) which
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
446

holds without fail. This will be expressed as
x →
C
y
Also consider the prohibition F(p|q
1
); this can be ex-
pressed as
q
1
⇒
O
¬p
A strong permission acting as an exception to the
above prohibition, P(p|q
2
), can be expressed as
q
2
O
p
If we have a collection of facts F and a normative
system (sets of constitutive and regulative norms) de-
fined in the language above, we can form a defeasible
theory:
Definition 2.3 (Defeasible Theory (Governatori,
2018)). A defeasible theory D is defined by the tuple
hF, R
O
,R
C
,>i, where F is a set of facts in the form of
literals, R
O
is a set of regulative rules, R
C
is a set of
constitutive rules, and > is a superiority relation over
conflicting rules.
The theorem prover for DDL, SPINdle (Lam and
Governatori, 2009) takes a defeasible theory and out-
puts a set of conclusions, which is the set of literals
occurring in the defeasible theory tagged according
to their status as provable or not provable. There are
several types of conclusions we can derive from a de-
feasible theory; conclusions can be negative or posi-
tive, definite or defeasible, or factual or deontic. The
proof tags are:
• +∆
∗
: definitely provable conclusions are either
facts or derived only from strict rules and facts.
• −∆
∗
: definitely refutable conclusions are neither
facts nor derived from only strict rules and facts.
• +∂
∗
: defeasibly provable conclusions are not re-
futed by any facts or conflicting rules, and are im-
plied by some undefeated rule.
• −∂
∗
: defeasibly refutable conclusions are conclu-
sions for which their complemented literal is de-
feasibly provable, or an exhaustive search for a
constructive proof for the literal fails.
(Governatori, 2018)
Note that for factual conclusions, ∗ := C, and
for deontic conclusions, ∗ := O. So, for example,
if we were to derive “p is forbidden” from a de-
feasible theory D, we would have D ` +∆
O
¬p or
D ` +∂
O
¬p, depending on whether or not the con-
clusion was reached definitely or defeasibly. These
conclusions can be computed in linear time. (Gover-
natori et al., 2013)
2.2.2 The Normative Supervisor
The normative supervisor – introduced in (Neufeld
et al., 2021) – is an external reasoning module capable
of interfacing with a reinforcement learning agent. It
is composed primarily of a normative system, an auto-
matic translation submodule to transform facts about
the environment and the normative system into a de-
feasible theory, and a theorem prover to reason about
said defeasible theory. The logic and associated the-
orem prover used both in (Neufeld et al., 2021) and
here are DDL and SPINdle respectively.
The normative supervisor monitors the agent and
its environment, dynamically translating states and
the normative system into defeasible theories; gener-
ally, facts about the environment (e.g., the locations
of objects the agent observes) are translated to liter-
als, and compose the set of facts of the defeasible the-
ory. Note that to perform this translation, we do not
need to have any kind of model of the environment
(e.g., we do not need to have learned an MDP), we
only need, for example, a simple labelling function
that maps states to atomic propositions which are true
in that state.
Meanwhile, the constitutive norms and regulative
norms are translated into DDL rules and added to the
defeasible theory. The final addition to the defeasible
theory will be sets of non-concurrence constraints:
C(a,¬a
0
) ∈ C , ∀a
0
∈ A − {a}
These constraints establish that only one action can
be taken; if we have an obligation of a, it effectively
forbids the agent from choosing another action.
We will use T h(s, N ) to denote the theory gener-
ated for state s, the normative system N , and the set of
non-concurrence constraints. Based on the output of
the theorem prover, the supervisor filters out actions
that do not comply with the applicable normative sys-
tem, and constructs a set of compliant solutions (see
(Neufeld et al., 2021) for a full description).
However, we are not here interested in finding an
entire set of compliant solutions. Our task is simpler;
given an action a and a current state s, we only want
to know if the prohibition of a is provable from the
theory; that is, if +∂
O
¬a is output by SPINdle given
the input T h(s,N ). This procedure is much simpler
than the supervisor’s main function, as we only need
to search a set of conclusions for a single specific con-
clusion.
Reinforcement Learning Guided by Provable Normative Compliance
447

3 NORM-GUIDED
REINFORCEMENT LEARNING
Here we discuss how the mechanisms of the norma-
tive supervisor explained in Sect. 2.2.2 can be uti-
lized within a MORL framework to learn compliant
behaviour, in a process we will call norm-guided re-
inforcement learning (NGRL). NGRL is a customiz-
able approach to implementing ethically compliant
behaviour, that blends techniques and tools from both
logic and reinforcement learning.
The basic approach is this: given an agent with
an objective x (and an associated reward function
R
x
(s,a)), we define a second reward function that as-
signs punishments when an agent violates a norma-
tive system N . We call this second reward function a
non-compliance function:
Definition 3.1 (Non-compliance Function). A non-
compliance function for the normative system N is
any function of the form:
R
N ,p
(s,a) =
(
p T h(s,N ) ` +∂
O
¬a
0 otherwise
where p ∈ R
−
.
In the above definition, p is called the penalty, and
T h(s,N ) is a normative system translated together
with a state s into a defeasible theory, for example by
the translators used by the normative supervisor. The
automated derivation of conclusions from T h(s, N )
solves the first challenge of reward specification, al-
lowing us to dynamically determine the compliance
of an action in a given state and thereby assign a pun-
ishment. As for the second challenge, we will discuss
the magnitude of p in Sect. 3.3. Summarily, what
this non-compliance function R
N ,p
does is, for each
state-action pair (s,a), assign a fixed punishment if
and only if a violates N in state s.
Now, suppose we have an agent we want to learn
objective x with the reward function R
x
(s,a); it can
learn to do so over the MDP
M = hS, A,R
x
,Pi
If we have a normative system N we wish to have
the agent adhere to while it fulfills objective x, we can
build an MOMDP we will call a compliance MDP:
Definition 3.2 (Compliance MDP). Suppose we have
a single-objective MDP M = hS,A, R
x
,Pi. Then we
can create an associated compliance MDP by intro-
ducing a non-compliance function R
N ,p
(s,a) to form
the MOMDP:
M
N ,p
= hS, A, (R
x
,R
N ,p
)
T
,Pi
The goal of NGRL is to find an optimal-ethical
policy for a compliance MDP, where the terminology
optimal-ethical is taken from (Rodriguez-Soto et al.,
2021). We adapt their definitions below:
Definition 3.3 (Ethical Policy (Rodriguez-Soto et al.,
2021)). Let Π be the set of all policies over the com-
pliance MDP M
N ,p
. A policy π
∗
∈ Π is ethical if and
only if it is optimal with respect to the value function
V
π
N ,p
corresponding to R
N ,p
. In other words, π
∗
is
ethical for M
N ,p
iff
V
π
∗
N ,p
(s) = max
π∈Π
V
π
N ,p
(s) (1)
for all s.
Definition 3.4 (Ethical-optimal Policy (Rodriguez–
Soto et al., 2021)). Let Π
N
be the set of all ethical
policies for M
N ,p
. Then π
∗
∈ Π
N
is ethical-optimal
for M
N ,p
iff
V
π
∗
x
(s) = max
π∈Π
N
V
π
x
(s) (2)
for all s.
There are a plethora of MORL techniques for
learning optimal solutions for MOMDPs; there will
be multiple ways to learn ethical-optimal solutions for
some compliance MDP M
N ,p
. Below we will dis-
cuss two different MORL algorithms that we adopt to
solve M
N ,p
for ethical-optimal policies. After defin-
ing these methods we will prove some useful proper-
ties of NGRL.
3.1 Linear Scalarization
A common approach to MORL is scalarizing the vec-
tor of Q-functions associated with the multiplicity of
objectives by weighting each function with positive
values (Roijers et al., 2013). Here, we will use an ap-
proach similar to (Rodriguez-Soto et al., 2021); how-
ever, we simplify their case slightly by having only
one function associated with ethical behaviour, R
N ,p
.
Given a weight vector ~w ∈ R
+
n
, the approach we
take is to learn Q
N ,p
(s,a) and Q
x
(s,a) concurrently,
and scalarize the vector of Q-functions via the inner
product of the weight and Q-value vector. In other
words, we want to maximize
V
scalar
(s) = ~w ·
~
V (s) (3)
where
~
V (s) = (V
x
(s),V
N ,p
(s))
T
, by selecting actions
through the scalarized Q-function be defined as
Q
scalar
(s,a) = ~w ·
~
Q(s,a) (4)
where
~
Q(s,a) = (Q
x
(s,a), Q
N ,p
(s,a))
T
. In the case of
the compliance MDP M
N ,p
defined above, we can as-
sume without loss of generality that this weight vector
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
448

is of the form (1, w)
T
for some w ∈ R
+
. (Rodriguez-
Soto et al., 2021)
How do we find an appropriate w? (Rodriguez-
Soto et al., 2021) describes a method using Convex
Hull Value Iteration (Barrett and Narayanan, 2008).
For the sake of brevity, we will not discuss this al-
gorithm in detail, and only relay the results from
(Rodriguez-Soto et al., 2021):
Proposition 3.1. If at least one ethical policy exists,
there exists a value w ∈ R
+
such that any policy max-
imizing V
scalar
(s) is ethical-optimal.
Proof sketch: This proposition follows from Theorem
1 of (Rodriguez-Soto et al., 2021).
3.2 TLQ-learning
(G
´
abor et al., 1998) describes a MORL approach
where certain objectives can be prioritized over oth-
ers. (Vamplew et al., 2011) gives what they describe
as a naive approach to the work in (G
´
abor et al.,
1998), which we will follow here.
This approach is tailored in particular to problems
where there is a single objective that must be max-
imized, while all other objectives don’t need to be
maximized, as such, but rather must satisfy a given
threshold. For us, implementing this framework is
quite simple, as we have only two objectives: the ob-
jective represented by R
x
(which we want to maxi-
mize) and the objective represented by R
N ,p
, which
we would like to prioritize and constrain. Thus, we
need to set a constant threshold C
N ,p
for the objec-
tive represented by R
N ,p
, while the threshold for the
objective represented by R
x
is set to C
x
= +∞.
When we select an action, instead of Q-values, we
consider CQ-values defined as
CQ
i
(s,a) = min(Q
i
(s,a),C
i
)
which takes the thresholds into account. The next step
in this approach is to order actions based on their CQ-
values. Again, since we only have two objectives, we
were able to simplify the procedure given in (Vam-
plew et al., 2011) to:
1. Create a set eth(s) = {a ∈ A|CQ
N ,p
(s,a) =
max
a
0
∈A
CQ
N ,p
(s,a
0
)} of actions with the highest
CQ
N ,p
-values for the current state s.
2. Return a subset opt(s) = {a ∈ eth(s)|CQ
x
(s,a) =
max
a
0
∈eth(s)
CQ
x
(s,a
0
)} of the actions of eth(s),
with the highest CQ
x
-values.
Our policy must select, for a state s, an action from
opt(s).
Summarily, we always take an action that is max-
imal for CQ
N ,p
, and within the actions that maximize
CQ
N ,p
, we take the action with a value that is maxi-
mal for Q
x
.
Proposition 3.2. If an ethical policy exists, when
C
N ,p
= 0, any policy such that π(s) ∈ opt(s) for all
s designates an ethical-optimal policy for M
N ,p
.
Proof sketch: Since the value of R
N ,p
(s,a) is either
strictly negative (when a violation takes place) or zero
(when the action is compliant), Q
N ,p
(s,a) ≤ 0 for all
state-action pairs. Therefore, if we set the threshold
C
N ,p
= 0, we get CQ
N ,p
(s,a) = Q
N ,p
(s,a). This
means that any policy π that only follows actions from
eth(s) fulfills Definition 3.3. Likewise, any policy π
∗
that only follows actions from opt(s) will fulfill Def-
inition 3.4 for an ethical-optimal policy.
3.3 Features of NGRL
In the above subsections, we have referenced
R
N ,p
(s,a) without specifying a penalty p. As
promised, we now address the magnitude of p. In
order to address the issue of what p should actually
be, in practise, we will need the following lemma:
Lemma 3.1. Let M = hS, A,R, Pi be an MDP, with
two compliance MDPs M
N ,p
= hS,A, (R,R
N ,p
)
T
,Pi
and M
N ,q
= hS, A,(R, R
N ,q
)
T
,Pi. Then for any policy
π ∈ Π
M
:
V
π
N ,p
(s) = c ·V
π
N ,q
(s)
for some positive coefficient c, where V
π
N ,p
(s) and
V
π
N ,q
(s) are the value functions associated with R
N ,p
and R
N ,q
respectively.
Proof sketch: it follows directly the linearity of con-
ditional expectation that the above property holds for
the value c =
p
q
∈ R
+
.
With this lemma it is a simple matter to prove the
following useful feature of NGRL:
Theorem 3.2. If a policy π is ethical for the compli-
ance MDP M
N ,p
for some constant p ∈ R
−
, it is eth-
ical for the compliance MDP M
N ,q
for any q ∈ R
−
.
Proof: Let p ∈ R
−
be a penalty and π
∗
be an ethi-
cal policy for M
N
= hS,A, (R
x
,R
N ,p
)
T
,Pi. Then we
know that V
π
∗
N ,p
(s) = max
π∈Π
M
V
π
N ,p
(s). However, for
any arbitrary penalty q ∈ R
−
, there is a c ∈ R
+
such
that V
π
N ,p
(s) = c ·V
π
N ,q
(s) for any π ∈ Π
M
. Therefore
V
π
∗
N ,q
(s) = max
π∈Π
M
V
π
N ,q
(s).
So if π
∗
is an ethical policy for the compliance
MDP M
N ,p
= hS,A, (R
x
,R
N ,p
)
T
,Pi it is ethical for
the compliance MDP M
N ,q
= hS, A, (R
x
,R
N ,q
)
T
,Pi
as well.
Thus, the value of p is irrelevant, so for the re-
mainder of the paper we will only deal with the non-
compliance function R
N
:= R
N ,−1
. This solves the
Reinforcement Learning Guided by Provable Normative Compliance
449

second essential challenge we identified for reward
specification.
3.4 Limitations of NGRL
NGRL may fail to capture some desired subtleties in
the form of normative conflicts and contrary-to-duty
obligations; this is discussed below.
DDL facilitates non-monotonic reasoning, which
makes it suitable for handling normative systems that
may at first glance seem to be inconsistent. Take, for
instance, a normative system N = hC , R ,>i, where
R = {O(b|a),F(b|a)} and >= {(O(b|a), F(b|a))}.
In DDL, we would represent the rules as r
1
: a ⇒
O
b
and r
2
: a ⇒
O
¬b, where r
1
> r
2
. If we assume as a
fact a, we will be able to derive the conclusion: +∂
O
b.
This dictates the behaviour we would desire from the
system – the agent sees to it that b, or else is pun-
ished. However, r
2
(that is, F(b|a)) is still violated
by this course of action, and we might want to assign
the agent a (albeit lesser) punishment for this viola-
tion. In our framework, however, taking action b is
considered, for all intents and purposes, compliant.
In some cases, where the conflict occurs for reasons
completely out of the agent’s control, our framework
is the more appropriate approach. However, in cases
where the agent’s own actions have resulted in a sce-
nario where it cannot obey all applicable norms, we
might want to assign punishments to any action the
agent takes, albeit of different magnitudes.
A second, more problematic scenario can be
found in contrary-to-duty obligations. Contrary-to-
duty obligations are obligations that come into force
when another norm is violated. The classic exam-
ple can be found in (Chisholm, 1963). Below, con-
sider a normative system N = hC , R ,>i, where R =
{O(b|¬a),O(a|>)}. In DDL these norms are: r
1
:
⇒
O
a and r
2
: ¬a ⇒
O
b. Suppose further that the
agent has 3 actions available to it: a, b, c. The first
problem arises in that r
2
is triggered by the agent
not taking action a, and when we construct T h(s,N ),
this information is not included. This can be reme-
died; we construct a new theory which takes into ac-
count which action is taken. However, a new problem
then arises; the obligation of a along with the non-
concurrence constraints over a imply the prohibition
of b and c. These constraints will be strict rules, and
will therefore defeat any defeasible rules with con-
flicting consequent. In other words, r
2
, even if trig-
gered, will be defeated and we will be able to derive
both +∂
O
¬b and +∂
O
¬c. Thus, the agent will be as-
signed identical punishments for performing actions
b and c, though it may be desirable to incentivize the
agent to, given the choice between b and c, choose b.
Based on examples like those above, we might
find it appropriate to assign graded penalties to viola-
tions of a normative system, depending on how much
of it is violated. It remains to be seen if an agent can
learn how to handle cases like this without the further
interference of the normative supervisor.
4 EXPERIMENTAL RESULTS
We now review an evaluation of the methods dis-
cussed in Sect. 3. In Sect. 4.1 we will describe our
agent’s environment and the normative system it is
subject to, and in 4.2 we discuss the results of training
an agent using the methods above for 9000 episodes
and testing over 1000.
1
In the below tests, we use the normative supervi-
sor in two different ways: its original mode of oper-
ation, performing real time compliance checking dur-
ing testing (when it is in use, this will be designated
by a yes in the Monitored? column of the table in
Sect. 4.2), and to facilitate NGRL.
4.1 Benevolent Pac-Man
In (Neufeld et al., 2021), the performance of the su-
pervisor used in conjunction with a Q-learning agent
with function approximation was evaluated with a
simulation of the arcade game Pac-Man. Since most
of the work in this paper is built on Q-learning without
function approximation, the agents we discuss cannot
handle such a complex environment, so we have made
a simplified version of the game for them to play.
In this simplified game Pac-Man is located on a
small 5 × 3 grid with only a single ghost and power
pellet located in opposite corners. Pac-Man gains 500
points if he wins the game (by eating all the food pel-
lets), and loses 500 if he loses the game (by being
eaten by the ghost, which moves randomly). There
are 11 food pellets in this simplified game and Pac-
Man loses 1 point per time step; thus, the maximum
score (without eating the ghost) is 599 points. When
Pac-Man eats the power pellet and the ghost becomes
scared, Pac-Man can eat the ghost for an additional
200 points.
The normative system we use is built around the
imposition of the “duty” of “benevolence” onto Pac-
Man. This is represented by the norm
O(benevolent|>) ∈ R (5)
1
Tests were run on a laptop with a Intel i7-7500U CPU
(4 cores, 2.70 GHz) and 8GB RAM, Ubuntu 16.04, Java 8,
Python 2.7
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
450
which means that Pac-Man should be benevolent at all
times. What does it mean for Pac-Man to be benev-
olent? We don’t have an explicit definition, but we
have a description of non-benevolent behaviour:
C(eat(person), ¬benevolent) ∈ C (6)
where eat(person) is a description of the act of eating
an entity designated as a person. That is, we know
that Pac-Man is not being benevolent if he eats a per-
son. Additional constitutive norms could expand our
definition of benevolence. We next add a second con-
stitutive norm,
C(eat(blueGhost), eat(person)) ∈ C (7)
asserting that eating a blue ghost counts as eating a
person.
This concept of eating the ghost also needs to be
further specified in our normative system. We use
the same formalization used in (Neufeld et al., 2021),
with additional constitutive norms asserting that mov-
ing into the same cell as a ghost while the ghost is
scared counts as eating the ghost. For a full descrip-
tion of the structure of constitutive norms required to
establish these concepts, see (Neufeld et al., 2021).
This normative system produces the same behaviour
as the “vegan” norm set used in (Neufeld et al., 2021)
– that is, it manifests as a prohibition from eating the
blue ghost – the difference lies in how it is formal-
ized, using a more abstract set of concepts to govern
behaviour.
4.2 Results
We ran the tests summarized in Table 1 on three
kinds of agents: a regular Q-learning agent, and the
two NGRL agents we described in Sect. 3 (the linear
scalarization agent and the TLQ-learning agent).
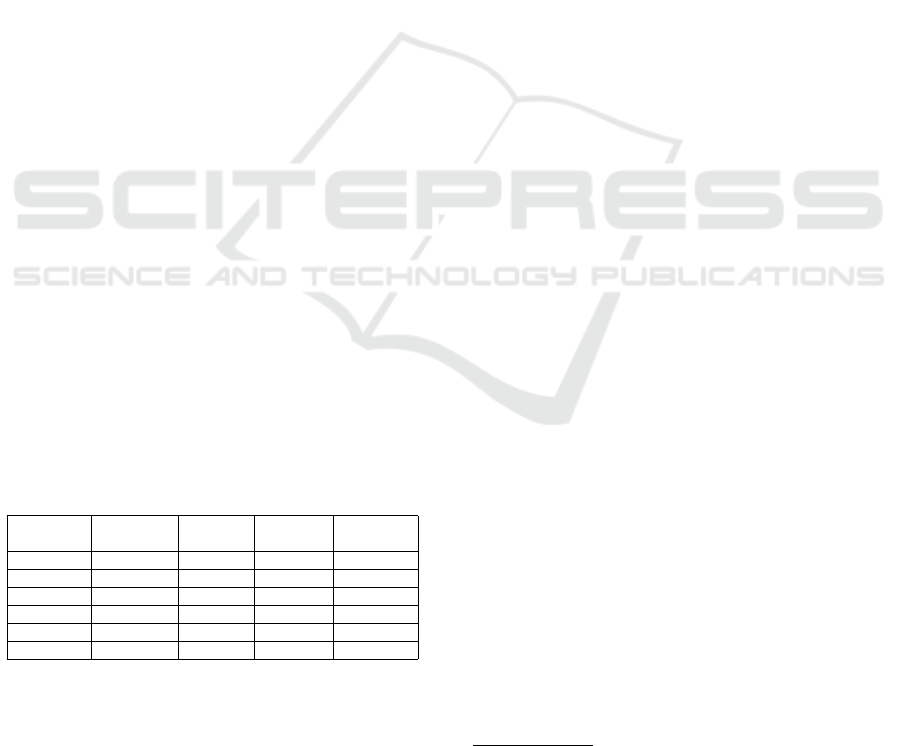
Table 1: Results with 3 different agents, with and without
normative supervision.
Agent Monitored? % Games Avg Game Avg Ghosts
Won Score Eaten
Q-learning no 68.5% 441.71 0.851
Scalarized no 82.0% 433.74 0.142
TLQL no 82.0% 433.74 0.142
Q-learning yes 46.6% 25.22 0.0
Scalarized yes 86.3% 448.23 0.001
TLQL yes 86.3% 448.23 0.001
The results of Table 1 show that for NGRL (with-
out supervision), the agents failed to comply with the
normative system about as often as they failed to win
the game. It is notable that both NGRL methods, lin-
ear scalarization and TLQL, converged to the same
policy, resulting in identical numbers. However, it is
also worth noting that though the number of ghosts
eaten was reduced significantly (in the linear scalar-
ization and TLQL tests, the number of ghosts eaten
is only one sixth of what it was for the Q-learning
agent), the behaviour of eating ghosts was not even
close to being eliminated. When using the normative
supervisor with regular Q-learning, on the other hand,
no ghosts were eaten; in the meantime, the agent’s
ability to play the game was hampered greatly.
We received the best overall results when combin-
ing NGRL with normative supervision; it was in these
tests that we saw the highest win rates/score, and an
elimination of ghosts consumed.
2
While the norma-
tive supervisor, in its original monitoring role, elim-
inates the possibility of unnecessarily violating the
norm base, it does not teach the agent to learn an opti-
mal policy within the bounds of compliant behaviour.
Consider the following example: an autonomous ve-
hicle is travelling down a road that runs through pri-
vate property, which it is forbidden from entering; if
the agent is told as soon as it encounters this private
property that it is forbidden from proceeding, it must
turn back and find another route, while it would have
been more efficient for the agent to select a compliant
route from the beginning. NGRL allows the agent to
incorporate information about which actions are com-
pliant and which are not into its learning of optimal
behaviour; as a result, the performance of the agent
in accomplishing its non-ethical goals is not compro-
mised to the same degree it might be when we employ
only real-time compliance-checking.
5 CONCLUSION
Teaching autonomous agents ethically or legally com-
pliant behaviour through reinforcement learning en-
tails assigning penalties to behaviour that violates
whatever normative system the agent is subject to.
To do so, we must determine (1) when to assign a
penalty, and (2) how steep that penalty should be. We
have addressed both of these challenges with norm-
guided reinforcement learning (NGRL), a framework
for learning that utilizes a normative supervisor that
assesses the agent’s actions with respect to a norma-
tive system. In doing so, we relegate (1) to the assess-
ments of the normative supervisor, and sidestep (2)
with techniques that produce ethical policies, show-
ing that they will do so regardless of the magnitude of
punishment given. Our approach provides us with a
framework for identifying non-compliant actions with
2
An elimination with the exception of 1. We confirmed
this to be the edge case described in (Neufeld et al., 2021),
where the agent consumes a ghost ‘by accident’, when it
collides with the ghost right as it eats the power pellet.
Reinforcement Learning Guided by Provable Normative Compliance
451

respect to a given normative system, and assigning
punishments to a MORL agent simultaneously learn-
ing to achieve ethical and non-ethical objectives.
NGRL offers more versatility with respect to the
complexity of the norms to be adhered to, than di-
rectly assigning rewards to specific events or with re-
spect to simple constraints. It may be the case that
there is no obvious or coherent way to summarize an
entire normative system by selecting specific events
and assigning punishments to them. By using NGRL,
we expand what kinds of normatively compliant be-
haviour we can learn, and are allowed to specify them
in a more natural way.
Our experimental results showed that NGRL was
effective in producing an agent that learned to avoid
most violations – even in a stochastic environment –
while still pursuing its non-ethical goal. However,
these results also revealed that we achieve optimal
results when we use NGRL in conjunction with the
normative supervisor as originally intended, as a real-
time compliance-checker. NGRL allows us to circum-
vent the weaknesses of the normative supervision ap-
proach – namely, its inability to preemptively avoid
violations – while normative supervision allows us to
maintain a better guarantee of compliance.
As discussed in Sect. 3.3.1, NGRL can be further
developed in its handling of normative conflict and
contrary-to-duty obligations. Moreover, as this ap-
proach applies only to MORL variants of Q-learning,
it will fall prey to the same scaling issues. Adapting
NGRL to be used with Q-learning with function ap-
proximation, for example, will broaden the domains
to which NGRL can applied.
REFERENCES
Abel, D., MacGlashan, J., and Littman, M. L. (2016). Rein-
forcement learning as a framework for ethical decision
making. In AAAI Workshop: AI, Ethics, and Society,
volume 16.
Alshiekh, M., Bloem, R., Ehlers, R., K
¨
onighofer, B.,
Niekum, S., and Topcu, U. (2018). Safe reinforcement
learning via shielding. In Proceedings of the AAAI
Conference on Artificial Intelligence, volume 32.
Balakrishnan, A., Bouneffouf, D., Mattei, N., and Rossi, F.
(2019). Incorporating behavioral constraints in online
AI systems. In Proceedings of the AAAI Conference
on Artificial Intelligence, volume 33, pages 3–11.
Barrett, L. and Narayanan, S. (2008). Learning all opti-
mal policies with multiple criteria. In Proceedings of
the 25th international conference on Machine learn-
ing, pages 41–47.
Boella, G. and van der Torre, L. (2004). Regulative and
constitutive norms in normative multiagent systems.
In Proc. of KR 2004: the 9th International Confer-
ence on Principles of Knowledge Representation and
Reasoning, pages 255–266. AAAI Press.
Broersen, J. M., Cranefield, S., Elrakaiby, Y., Gabbay,
D. M., Grossi, D., Lorini, E., Parent, X., van der Torre,
L. W. N., Tummolini, L., Turrini, P., and Schwarzen-
truber, F. (2013). Normative reasoning and con-
sequence. In Normative Multi-Agent Systems, vol-
ume 4 of Dagstuhl Follow-Ups, pages 33–70. Schloss
Dagstuhl - Leibniz-Zentrum f
¨
ur Informatik.
Chisholm, R. M. (1963). Contrary-to-duty imperatives and
deontic logic. Analysis, 24(2):33–36.
G
´
abor, Z., Kalm
´
ar, Z., and Szepesv
´
ari, C. (1998). Multi-
criteria reinforcement learning. In Proceedings of
the Fifteenth International Conference on Machine
Learning., volume 98, pages 197–205.
Governatori, G. (2018). Practical normative reasoning with
defeasible deontic logic. In Reasoning Web Interna-
tional Summer School, pages 1–25. Springer.
Governatori, G. and Hashmi, M. (2015). No time for com-
pliance. In IEEE 19th International Enterprise Dis-
tributed Object Computing Conference, pages 9–18.
IEEE.
Governatori, G., Olivieri, F., Rotolo, A., and Scannapieco,
S. (2013). Computing strong and weak permissions
in defeasible logic. Journal of Philosophical Logic,
42(6):799–829.
Hasanbeig, M., Abate, A., and Kroening, D. (2019).
Logically-constrained neural fitted q-iteration. In Pro-
ceedings of the 18th International Conference on Au-
tonomous Agents and MultiAgent Systems, AAMAS
’19, page 2012–2014.
Hasanbeig, M., Abate, A., and Kroening, D. (2020). Cau-
tious reinforcement learning with logical constraints.
In Proceedings of the 19th International Conference
on Autonomous Agents and Multiagent Systems, AA-
MAS ’20, Auckland, New Zealand, May 9-13, 2020,
pages 483–491.
Hasanbeig, M., Kantaros, Y., Abate, A., Kroening, D., Pap-
pas, G. J., and Lee, I. (2019). Reinforcement learning
for temporal logic control synthesis with probabilistic
satisfaction guarantees. In Proc. of CDC 2019: the
58th IEEE Conference on Decision and Control.
Jansen, N., K
¨
onighofer, B., Junges, S., Serban, A., and
Bloem, R. (2020). Safe Reinforcement Learning Us-
ing Probabilistic Shields (Invited Paper). In 31st Inter-
national Conference on Concurrency Theory (CON-
CUR 2020), volume 171 of Leibniz International Pro-
ceedings in Informatics (LIPIcs), pages 3:1–3:16.
Jones, A. J. I. and Sergot, M. (1996). A Formal Characteri-
sation of Institutionalised Power. Logic Journal of the
IGPL, 4(3):427–443.
Kasenberg, D. and Scheutz, M. (2018). Norm conflict
resolution in stochastic domains. In Proceedings of
the AAAI Conference on Artificial Intelligence, vol-
ume 32.
Lam, H.-P. and Governatori, G. (2009). The making of
SPINdle. In Proc. of RuleML 2009: International
Symposium on Rule Interchange and Applications,
volume 5858 of LNCS, Heidelberg. Springer.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
452

Neufeld, E., Bartocci, E., Ciabattoni, A., and Governatori,
G. (2021). A normative supervisor for reinforcement
learning agents. In Proceedings of CADE 28 - 28th
International Conference on Automated Deductions,
pages 565–576.
Noothigattu, R., Bouneffouf, D., Mattei, N., Chandra, R.,
Madan, P., Varshney, K. R., Campbell, M., Singh, M.,
and Rossi, F. (2019). Teaching AI agents ethical val-
ues using reinforcement learning and policy orchestra-
tion. In Proc of IJCAI: 28th International Joint Con-
ference on Artificial Intelligence.
Palmirani, M., Governatori, G., Rotolo, A., Tabet, S., Boley,
H., and Paschke, A. (2011). Legalruleml: Xml-based
rules and norms. In International Workshop on Rules
and Rule Markup Languages for the Semantic Web,
pages 298–312. Springer.
Rodriguez-Soto, M., Lopez-Sanchez, M., and Ro-
driguez Aguilar, J. A. (2021). Multi-objective re-
inforcement learning for designing ethical environ-
ments. In Proceedings of the Thirtieth International
Joint Conference on Artificial Intelligence, IJCAI-21,
pages 545–551. International Joint Conferences on
Artificial Intelligence Organization.
Roijers, D. M., Vamplew, P., Whiteson, S., and Dazeley,
R. (2013). A survey of multi-objective sequential
decision-making. Journal of Artificial Intelligence Re-
search, 48:67–113.
Vamplew, P., Dazeley, R., Berry, A., Issabekov, R., and
Dekker, E. (2011). Empirical evaluation methods
for multiobjective reinforcement learning algorithms.
Machine learning, 84(1):51–80.
Vamplew, P., Dazeley, R., Foale, C., Firmin, S., and Mum-
mery, J. (2018). Human-aligned artificial intelligence
is a multiobjective problem. Ethics and Information
Technology, 20(1):27–40.
Wu, Y.-H. and Lin, S.-D. (2018). A low-cost ethics shaping
approach for designing reinforcement learning agents.
In Proceedings of the AAAI Conference on Artificial
Intelligence, volume 32.
Reinforcement Learning Guided by Provable Normative Compliance
453
