
Developing a Successful Bomberman Agent
Dominik Kowalczyk, Jakub Kowalski, Hubert Obrzut, Michał Maras, Szymon Kosakowski
and Radosław Miernik
University of Wrocław, Faculty of Mathematics and Computer Science, Poland
mmaras1999@gmail.com, szymon.kosu@gmail.com, radoslaw.miernik@cs.uni.wroc.pl
Keywords:
Bomberman, Beam Search, Monte Carlo Tree Search, Rolling Horizon Evolutionary Algorithm, CodinGame.
Abstract:
In this paper, we study AI approaches to successfully play a 2–4 players, full information, Bomberman variant
published on the CodinGame platform. We compare the behavior of three search algorithms: Monte Carlo
Tree Search, Rolling Horizon Evolution, and Beam Search. We present various enhancements leading to
improve the agents’ strength that concern search, opponent prediction, game state evaluation, and game engine
encoding. Our top agent variant is based on a Beam Search with low-level bit-based state representation and
evaluation function heavy relying on pruning unpromising states based on simulation-based estimation of
survival. It reached the top one position among the 2,300 AI agents submitted on the CodinGame arena.
1 INTRODUCTION
Games were always used as testbeds for Artificial In-
telligence, being a motivation for the development of
new methods and showcase of the current advance-
ments. From the classic boardgames like Backgam-
mon (Tesauro, 1994), Checkers (Schaeffer et al.,
2007), Chess (Campbell et al., 2002), Go (Silver et al.,
2016), to video games like Pac-Man (Rohlfshagen
et al., 2017), Mario (Togelius et al., 2010), Hearth-
stone (Dockhorn and Mostaghim, 2019), Atari games
(Mnih et al., 2015), and Starcraft (Ontanón et al.,
2013; Vinyals et al., 2019). These approaches re-
sulted in the development and advancements of many
algorithms such as alpha-beta pruning, temporal dif-
ference learning, Monte Carlo Tree Search, Rolling
Horizon Evolutionary Algorithm, Deep Neural Net-
works, etc. (Russell and Norvig, 2020).
At the same time, thousands of commercially pub-
lished video games were developed relying solely
on “less advanced” techniques to control believable
agents and player opponents – such as BFS, DFS,
A
∗
, Finite State Machines, Decision Trees, Behavior
Trees, and Hierarchical Task Networks (Rabin, 2013;
Millington and Funge, 2009). Still, there are games
where the speed and relative simplicity of these ap-
proaches allow them to solve challenges posed by
academic research – just to mention Mario AI Com-
petition beaten by Robin Baumgarten’s A
∗
(Togelius
et al., 2010).
In this paper, we study AI approaches to suc-
cessfully play a Bomberman-like game (Hudson Soft,
1983), called Hypersonic. We present our compari-
son of three different algorithmic approaches (Monte
Carlo Tree Search, Rolling Horizon Evolution, and
Beam Search), various constructions of the evalua-
tion function, and the influence of the game engine
efficiency on the obtained results. Apart from inter-
nal testing, we have validated our agent on the online
arena provided by the CodinGame platform, contain-
ing currently about 2,300 AI agents. Our best agent is
stably (since about half a year) ranked in the top one
position on the leaderboard.
The paper is structured as follows. In the next sec-
tion, we briefly introduce game tree search algorithms
used, Bomberman in AI research, and the CodinGame
platform. The following section describes the Hy-
personic game in more detail. In Section 4 we con-
cisely compare the efficiency of our two engine rep-
resentations. Next, we present the components we
used to evaluate the game state. Section 6 describes
our algorithm implementations. The following sec-
tion contains the results of the cross-algorithms ex-
periments and the description of our submissions on
the CodinGame arena. Finally, we conclude in Sec-
tion 8.
Kowalczyk, D., Kowalski, J., Obrzut, H., Maras, M., Kosakowski, S. and Miernik, R.
Developing a Successful Bomberman Agent.
DOI: 10.5220/0010840200003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 2, pages 335-344
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
335

2 BACKGROUND
2.1 Algorithms
2.1.1 Beam Search
Beam Search
1
is a classic greedy algorithm merging
the breadth-first search approach with a heuristic eval-
uation function to prune nodes on each level of the
tree. In the standard implementation, at each level we
store at most beam width states, and only those nodes
are further expanded. Their descendants are evalu-
ated using a heuristic function and only the best beam
width are stored for the next round.
Beam Search is considered a good choice for
games that have limited interaction with the oppo-
nent(s), so the planning part is more important than
the exact opponent prediction. At the cost of losing
the optimality, the algorithm allows us to easily trade
branching factor for increased search depth – thus
gain an advantage on future planning. For this base
variant, multiple extensions have been proposed, e.g.
Beam Stack Search that makes the algorithm optimal
(Zhou and Hansen, 2005). Other standard enhance-
ments, such as transposition tables
2
, can be success-
fully applied as well.
2.1.2 Monte Carlo Tree Search
Monte Carlo Tree Search (MCTS) is a stochastic, any-
time, asymmetric, knowledge-free search algorithm
popular in a wide range of games and non-games
problems (Browne et al., 2012;
´
Swiechowski et al.,
2021). It has been especially successful in the do-
mains of computer Go (Silver et al., 2016) and various
challenges of General Game Playing (Perez-Liebana
et al., 2019b; Finnsson and Björnsson, 2010).
The algorithm gradually builds a partial game tree
combining random simulations of the game with a se-
lection of nodes (usually based on the UCB1 formula
(Kocsis and Szepesvári, 2006)) that guides search to-
wards promising paths.
Conceptually, the algorithm is knowledge-free. It
does not require heuristic knowledge about the game,
and the statistical data is gathered using true game
rewards obtained in the terminal states. However in
practice, for many games, it is impossible (or un-
profitable) to perform full game simulations, and it
is more beneficial to use a heuristic evaluation func-
tion to estimate the quality of game states at a certain
depth.
1
https://en.wikipedia.org/wiki/Beam_search
2
https://www.chessprogramming.org/Transposition_
Table
2.1.3 Rolling Horizon Evolutionary Algorithm
Rolling Horizon Evolutionary Algorithm (RHEA) ap-
proaches game tree search as a planning problem
and encodes sequences of actions as genomes (Perez
et al., 2013). It uses standard evolutionary operators
(recombination and mutation) to sparsely search for
good sequences in the domain of possible agent ac-
tions up to some depth. RHEA has been success-
fully used in multiple domains, outperforming MCTS
in games with continuous space (Samothrakis et al.,
2014), multi-action games (Justesen et al., 2016), and
also in General Video Game AI (Gaina et al., 2020).
A search performed by RHEA is less “methodi-
cal”, and in contrast to MCTS, rather than on accu-
mulated statistics, RHEA relies on (hopefully exist-
ing) similarities between good sequences of actions.
The algorithm is highly parameterizable and versa-
tile, depending on the choice of representation and
operators. As it does not rely on statistical signifi-
cance, it often requires less computations than MCTS
to find a good plan to follow. On the downside, using
operators may lead to illegal action sequences; thus,
usually, some repair procedure is required. Also, op-
ponent handling is less standardized – but also more
customizable – with multiple approaches that can be
used (Liu et al., 2016). RHEA is often combined with
heuristic functions that evaluate the game states’ qual-
ity after applying actions from the genome.
2.2 Pommerman
Pommerman is a variant of Bomberman developed
as a benchmark for AI agents, featuring competitive
and cooperation skills in multi-agent partially observ-
able scenario (Resnick et al., 2018). The game can be
played in three modes: free-for-all (FFA), team, and
team with communication. Also, the observations re-
ceived by the agents can be limited by their vision
range – a number of tiles around the players with the
visible content (everything else is hidden). The vision
can be set to infinity, resulting in a fully observable
game variant. Pommerman, in a partially observable
team variant without communication, has been used
as a NeurIPS 2018 competition.
In this competition, top agents were based on the
MCTS algorithm, including the winner and the agent
that placed third, described in (Osogami and Taka-
hashi, 2019). A comparison in playing strength of
some simple agents against MCTS, BFS, and Flat
Monte Carlo has been shown in (Zhou et al., 2018).
More comprehensive analysis focusing on statisti-
cal forward planning algorithms, namely MCTS and
RHEA, can be found in (Perez-Liebana et al., 2019a).
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
336

Additionally, various deep learning methods were
applied to learn how to play the game offline: e.g.,
Relevance Graphs obtained by a self-attention mech-
anism (Malysheva et al., 2018), or continual learn-
ing to train the population of advantage-actor-critic
agents (Peng et al., 2018). The runner-up of the learn-
ing track of the NeurIPS competition is described in
(Gao et al., 2019). Its network is trained using Prox-
imal Policy Optimization and improved with reward
shaping, curriculum learning, and action pruning.
Before the NeurIPS competition, a smaller one
was launched, focusing on the FFA mode (Resnick
et al., 2018). The winner used Finite State Machine
Tree Search, while the runner-up was a handcrafted,
rule-based agent.
2.3 CodinGame
CodinGame
3
is a challenge-based learning/coding
platform created in 2015 that contains multiple types
of activities, mainly related to AI programming.
These include a long list of algorithmic problems to
solve (as usual for such type of platform (Combéfis
et al., 2016)) and competitive programming, which re-
quires writing an agent that directly competes against
programs written by other players. Currently, the plat-
form supports 27 programming languages that may be
used to solve all of the available tasks.
Most of the proposed activities are game-like and
interactive, i.e., the user program sends actions and
gets responses from the system with the observations
that can be used to compute the next action. Also,
tasks on CodinGame usually have pleasant visualiza-
tions, making them more appealing and easier to de-
bug. Thus, the site generally receives positive feed-
back as a tool for education (Butt, 2016).
A few times per year, CodinGame organizes con-
tests based on newly released games. Two compe-
titions launched in 2020 gathered about 7,000 and
5,000 programmers respectively. Available problems
and games are developed not only by the CodinGame
team, but also by the community.
Some of them were created for research purposes,
e.g., TotalBotWar described in (Estaben et al., 2020).
The Strategy Card Game AI Competition
4
running
since 2019 with IEEE COG and CEC conferences is
based on a past CodinGame contest. Related research
focuses on choosing the right deck to play (Kowal-
ski and Miernik, 2020; Vieira et al., 2020) as well as
optimizing heuristic policies to select proper actions
(Montoliu et al., 2020).
3
https://www.codingame.com
4
https://legendsofcodeandmagic.com
Figure 1: A visualization of the Hypersonic game.
Figure 2: Playing Hypersonic in the CodinGame online
IDE. Top left – game visualization, bottom left – informa-
tion about current turn and debug, top right – agent source
code, bottom right – opponent setup for testing.
3 HYPERSONIC
Hypersonic is an adaptation of Bomberman (Hudson
Soft, 1983) as a programming game available on
the CodinGame platform (Fig. 1). It was initially
public for a competition held in September 2016. The
game attracted over 2,700 participants and was very
well-received by the community. After the contest
ended, Hypersonic became available as always ongo-
ing multiplayer activity
5
. Thus, everyone can write
his agent using an online CodinGame IDE (Fig. 2)
and test it on a public arena that currently contains
about 2,300 players. About 500 of them belong to the
highest, Legend league, which requires writing a pro-
gram that is better than a predefined agent called boss.
Game Rules. The game is played by 2 to 4 players
on 13×11 grids. Grid cells may be floors (passable by
the players), walls, or boxes (impassable). Walls are
always placed in the same way (every odd cell in both
directions), while boxes are placed randomly but sym-
metrically across the grid. Boxes can be destroyed by
bombs (in contrast to walls, which are indestructible).
5
https://www.codingame.com/multiplayer/
bot-programming/hypersonic
Developing a Successful Bomberman Agent
337

They may contain items inside, and destroying a box
with an item makes this item appear on the map.
Players start in corners of the map. Possible ac-
tions are to place a bomb on the current cell (or
not) and independently to move towards a given cell
(which on an atomic level is equal to move left, right,
up, down, or stay in place), so there are up to 10 pos-
sible actions per player. Players cannot move on a
cell containing a wall, box, or bomb. All players per-
form their moves simultaneously, and multiple play-
ers can occupy the same cell. If a player moves on
a cell containing an (unboxed) item, they collects it
(several players can collect the same item if they ar-
rived simultaneously).
Placed bombs explode after 8 turns, creating blasts
horizontally and vertically up to range cells. If a blast
encounters another bomb its explosion is automati-
cally triggered, causing a chain reaction. Such ex-
plosions eliminate players, destroy boxes, and remove
unboxed items. Explosions are computed and applied
before players’ actions.
Initially, players may place one bomb with a range
of 3. Items that may drop from boxes can give a player
additional bombs or increase his bombs’ range.
Players have full knowledge about the game state
and the moves of the opponents. This includes a
full visibility range and knowing the content of un-
destroyed boxes (if any).
Finally, players are ranked by the order of elimi-
nation (the winner is the last one standing). Ties are
resolved by counting the number of boxes destroyed
by the player’s bombs – a higher number wins. If all
boxes are gone, the game ends automatically after 20
turns. The turn limit is set to 200, but for the top tier
bots’ games usually take between 90–120 turns for
two players, and 70–100 turns for four-player games.
The time limits required by the CodinGame arena
are 1000 ms for the first turn and 100 ms for each
of the following turns. The communication protocol
is based on standard input/output streams – each turn
player reads the information about the actual game
state and outputs a single line with an action to per-
form.
The general rules of Hypersonic are roughly com-
parable to Pommerman free-for-all mode played in a
fully observable variant. However, note that certain
small differences have a significant impact on how
the game is actually played, e.g. varying number of
players, no bomb kicking action, destroyed boxes de-
ciding on player ranking.
4 ENGINE
In order to allow game tree search, we require a game
engine. It has to efficiently simulate the course of the
game, and support the following operations:
• Computing the legal actions for a given player,
which is used both in computing our agent’s best
actions and simulating enemies.
• Keeping the current game statistics, which are
used in the state evaluation; mainly for our agent
(more in Section 5).
• Computing the next game state given a set of ac-
tions of all the players (as all players perform their
actions simultaneously).
Usually, the game engine is also responsible for
detecting terminal states and returning the players’ re-
wards. In our approach, however, we treat the game
as potentially infinite and simulate the future without
taking into account the earlier endgame. This is due
to the fact that after all boxes in Hypersonic are gone,
then the secondary score is set and the only goal be-
comes survival. Moreover, most of the top bots be-
come passive at this stage avoiding risky actions.
Since the speed of the engine has a significant
impact on the performance of the algorithms, every-
thing was implemented in the C++ language. We
have developed two versions of the engine: one is
a very straightforward implementation of the game
rules, while the other relies heavily on bitwise opera-
tions and additional preprocessing.
The bitwise version reduces the complexity of
many engine functions, including blast propagation,
to constant time (instead of depending on the number
of items and the board size) thus it gives a significant
boost in performance. To show the scale of the im-
provement, we presented a comparison of simulation
speed between both engines in Table 1.
Table 1: The total number of actions performed by a ran-
dom agent during 500ms starting from example midgame
situation with 2, 3, and 4 players, resetting every 15 actions
or death.
Number of players 2 3 4
Naive engine 90k 79k 80k
Bitwise engine 1.45m 1.3m 1.28m
5 STATE EVALUATION
Besides standard engine functions related to the game
simulation, we implemented a few evaluation-related
helper functions that are calculated along the way.
They typically require a couple of additional fields
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
338

(increasing the size of the stored game state) but are
very helpful in determining a more precise state eval-
uation. Overall, it translates to a higher quality of the
agent.
The majority of these helper functions refer to the
“survivability problem” as this is a very common is-
sue in Hypersonic, especially when playing against
more players. Determining if a state is survivable for
our agent, allows us to prune bad states early and con-
centrate on more promising ones.
These helper state evaluation functions are:
• estimated_bombs(gamestate) – estimates
score for destroyed boxes. For each box de-
stroyed during the simulation, we add γ
d
, where
d is the number of turns in the future when the
bomb will explode.
• is_survivable(gamestate, player) – re-
turns true if the player can survive, assuming the
opponents will not place any new bombs. It is
checked using an eight-turns deep BFS.
• can_kill(gamestate, player, enemy) – re-
turns true if the enemy can successfully trap and
eliminate the player within the next two rounds.
This is calculated through an exhaustive search.
Then, we may calculate the evaluation function,
which is used to estimate the quality of the final (not
necessarily terminal in terms of the game rules) state
reached by the simulation. The value of the function
for the game state state is the sum of:
1. 1 point for each destroyed box,
2. 0.9 × min(5, range)+0.4 × range points
3. 3.4 × min(2, extra_bombs) +
1.7 × min(4, extra_bombs) +
0.7 × extra_bombs points
4. estimated_bombs(state) with γ = 0.95,
5. 0.05 × distance_to_other_players,
6. if there are more than 20 boxes remaining:
−0.04 × distance_to_center,
otherwise −0.1 × average_distance_to_boxes
7. −1000 points if the player is dead.
6 IMPLEMENTED ALGORITHMS
We have tried a few conceptually different ap-
proaches – evolutionary (RHEA), statistical (MCTS),
and greedy (Beam Search). Each approach has its
roadblocks that we had to overcome. From the pre-
liminary carried out experiments, it seems that the
best choice for Hypersonic is based on a greedy ap-
proach – Beam Search agent performed considerably
better than both MCTS and RHEA agents. This aligns
with the experience of the majority of other contes-
tants, as the best bots in CodinGame leaderboard use
a modified Beam Search algorithm.
For this reason, the development of the Beam
Search version received most of our attention, and we
tuned this algorithm carefully to work well against the
opponents on the CodinGame arena.
All algorithm parameters were chosen exper-
imentally, based on local testing, as well as the
performance on the CodinGame arena.
Opponent Prediction. Each of the algorithms ap-
plies a similar strategy to predict the opponents’ be-
havior. At the beginning of every turn, we run the
same algorithm as for our agent to simulate each of
the opponents. These opponents plan their actions
with the assumption that every other agent does not
move. Then, we apply the search for our agent with
the enemies following the approximated action se-
quences instead of standing still.
Application of this general opponent prediction
schema slightly differs between algorithms. MCTS
and RHEA simulate each opponent for 10ms, and
Beam Search allocates 15ms in total for all the op-
ponents. MCTS and RHEA need more time to find
any reasonable sequence of moves, when 5ms for each
player seemed enough for Beam Search.
6.1 MCTS
There are multiple variants of MCTS that seem el-
igible for the Bomberman-type game, most notably
Single-Player Monte-Carlo Tree Search (SP MCTS)
(Schadd et al., 2008) and Monte Carlo Tree Search
for Simultaneous Move Games (Lanctot et al., 2014).
The second one requires heavy computational power
– each player has up to 10 moves during a turn, so ev-
ery node might have up to 10
4
children. Even with the
highly optimized engine, we were not able to achieve
a reasonable amount of iterations, hence we aban-
doned this method.
In order to use the Single-Player MCTS algorithm,
one can completely ignore enemy players – given an
initial game state, the opponents never change their
position nor plant any bombs. In that way, the num-
ber of children for each node in the search tree is sig-
nificantly reduced, but the agent is unable to predict
any incoming traps from the enemy players and de-
tect which boxes will most likely be destroyed by the
enemies in the following turns.
As previously described, to address the issue with
predicting enemies, we run SP MCTS for each one
of them and generate an approximated sequence of
Developing a Successful Bomberman Agent
339

their future moves. Additionally, to avoid any possi-
ble traps, for each possible agent’s action in the initial
state we run an exhaustive search for two turns in the
future and check if any opponent is able to eliminate
the agent. If so, we omit that action in the search tree.
According to the rules, each game may have up
to 200 turns. In 100 ms the SP MCTS tree usually
reaches depth around 12 for the agent and 9 for the
opponents. Since the approximated action sequences
for the enemies are shorter and the enemies may
not even follow them, very deep simulations are not
reliable. Thus, we limit the depth of the random
simulations. If during the simulation the game did
not end, we use a heuristic function to evaluate the
value of the state. In addition, we completely ignore
the 200 round limit in the rules – the game ends only
if all players but one are eliminated.
Evaluation. Defining a good heuristic function for
the state evaluation poses a great challenge. Because
the state values for the MCTS need to be well bal-
anced, we were not able to use the same state evalua-
tion as described in the previous section. Most of the
random simulations end with the agent getting elim-
inated, so the penalty for the agent’s death cannot be
too high – otherwise, the MCTS will prefer states with
the least probability of death following a random pol-
icy, and the agent will be highly discouraged to plant
any bombs. We reward the agent for each box it de-
stroyed. We apply exponential decay to the points
achieved from destroying the boxes so that the agent
is encouraged to do it as soon as possible.
Because the depth of the simulations is rather
small, the agent may have a hard time finding se-
quences of actions to destroy boxes that are far away.
To obtain better results, the agent is rewarded for be-
ing close to the remaining boxes on the game board.
The experimentally chosen parameters for the MCTS
and the heuristic function were as follows:
• In the selection phase of the MCTS the classic
UCT method was used, with c constant set to 1.
• In each node we store two values: the mean and
the maximum of the results of random simula-
tions.
• When choosing the action to perform in the actual
play, the one with the highest maximum is taken.
• Depth of the random simulations is 15.
• For each round r of the simulation, reward
r
is
equal to the number of boxes the agent destroyed
and an additional point for each extra bomb
power-up until the agent has at least 4 bombs.
• The value of the final simulation state is 0 if the
agent died during a simulation. Otherwise, it is
calculated as
1
400
× (
15
∑
r=1
reward
r
× 50 × γ
r
+ 200 − box_dist),
where γ = 0.98, and box_dist is the sum of the
Manhattan distances between the agent and each
box on the game board.
6.2 RHEA
The main algorithm schema looks like this:
1. Maintain population_size of chromosomes,
each is a sequence of actions of length
chromosome_length.
2. Select parents based on fitness and use crossover
operators to create offspring_size children.
3. Mutate children with mutation_probability.
4. Create a new population using replacement oper-
ator.
One challenge in order for RHEA to work is to
properly evaluate an individual. It has to be noticed
that not every sequence of moves is a valid one, e.g.
we could have a wall ahead, we could have no bombs
in the inventory, or another bomb blocking a path.
This becomes especially true when we apply evo-
lutionary operators which are generally game rules
agnostic. The other problem is that performing an
action could lead us to death, which could be easily
avoidable. Thus, in our solution, we ignore actions
that are invalid or result in the agent’s death. Also,
additional effort was made to discourage individuals
which, although end up living, are not in a survivable
state. So the evaluation score of the individual is
the game state evaluation after all valid actions are
performed, reduced by punishment value. The further
in the future the first moment in which we are in a
not survivable state the smaller the punishment. If
we end up in a survivable state the punishment is zero.
The following evolutionary operators were used:
1. crossover: we have considered standard one-
point crossover and uniform crossover opera-
tors. Performed tests indicated that the one-point
crossover was much better. One explanation could
be that the one-point crossover is very natural
when it comes to problems related to pathfinding
(which our game has a lot in common).
2. mutation: we replace every gene of every
child with a random value with probability
mutation_probability.
3. selection: parents are selected using roulette
wheel method based on their fitness.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
340
4. replacement: we have considered (µ, λ) and (µ +
λ) replacement with full elitism. It seems that
(µ + λ) replacement is much more efficient as it
keeps previously found good solutions.
The parameter values we have used are
mutation_probability = 0.5, population_size = 50,
offspring_size = 50, chromosome_length = 17.
6.3 Beam Search
We extended a vanilla Beam Search schema by adding
a few enhancements. Notably:
• Zobrist hashing (ZH). At each level we re-
move duplicates by computing a hash function of
every state using Zobrist hashing.
• Opponent prediction (OP). We approximate
the enemies’ future actions as previously de-
scribed.
• Local beams (LB). We group states by the
player position and restrict that for each position
we can store at most local_beam_width best states
(according to our evaluation function). This al-
lows to maintain diversity and improve the qual-
ity of the search while preserving the greediness
of the algorithm. Still, the global restriction of
storing at most beam_width states at each level re-
mains.
• First move pruning (FMP). We prune all the
actions available in the initial state which are not
survivable. Additionally, if there is at least one
action that leads to enemy death, we prune all
the others. Those computations are done using
is_survivable and can_kill functions.
On some rare occasions it may be beneficial for
the agent to kill both the enemy and itself – ac-
cording to the rules, if every player is eliminated
from the game, the one that destroyed more boxes
wins. Whenever the agent is able to commit sui-
cide while also killing the last enemy, we calculate
the number of points each player is able to obtain
and if the win is certain, we force the agent to ap-
ply this action.
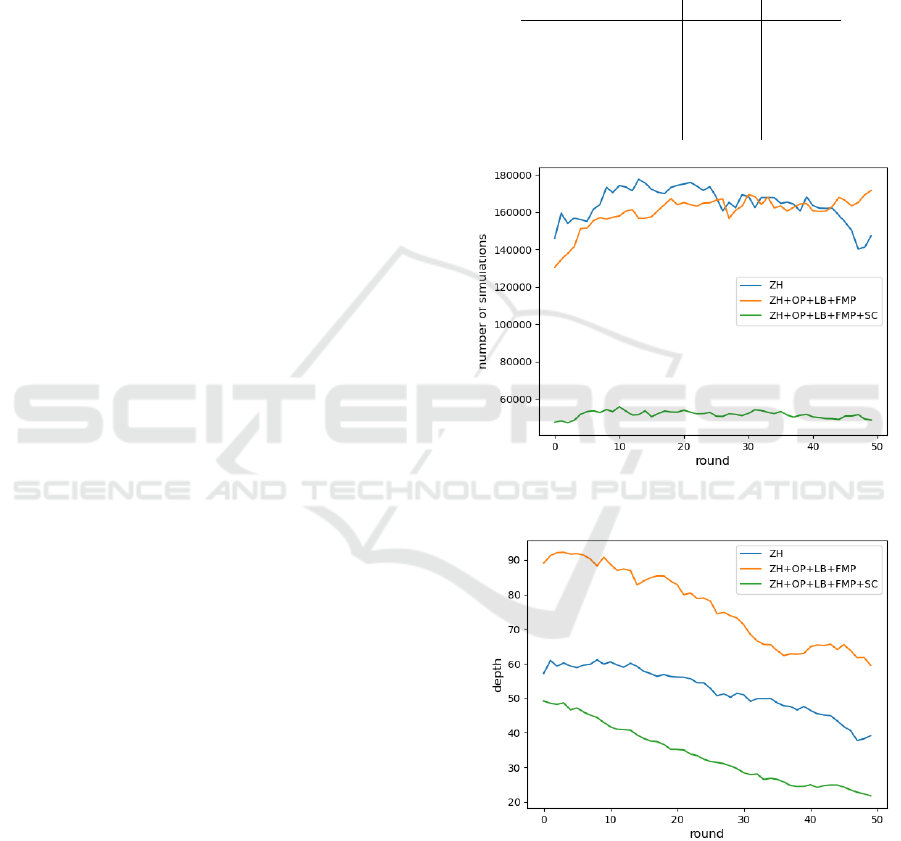
• Survivability checking (SC). We highly
discourage states in the beam that are not sur-
vivable, by decreasing their scores. Survivabil-
ity, similarly as in first move pruning, is detected
with is_survivable function. Although this im-
poses great computational costs (see Figures 3 and
4), it allows us to get rid of the bad states quickly
and focus more on the high-quality ones.
The parameter values we have used are
beam_width = 500 and local_beam_width = 12.
We have tested agent versions with each fea-
ture OP, LB, FMP against a vanilla version (ZH only,
beam_width increased to 1000). The comparison of
the above improvements is presented in Table 2.
Table 2: Influence of Beam Search improvements on
agent’s strength compared to the vanilla (i.e. containing
only ZH) version. The first row provides a baseline (ZH vs
ZH). 500 games per pair.
Enhancement WIN LOSE
ZH 19.00% 19.00%
ZH+OP 44.80% 19.60%
ZH+LB 45.20% 36.20%
ZH+FMP 45.00% 29.20%
ZH+OP+LB+FMP 57.60% 22.60%
ZH+OP+LB+FMP+SC 59.40% 23.40%
Figure 3: Number of simulations per game round for partic-
ular sets of features (100ms per round).
Figure 4: Depth reached by the Beam Search per game
round for particular sets of features (100ms per round).
Note that result of the ZH-only version is due to the twofold
increase of the beam width.
We did not test a single SC feature, as survivability
checking does not work standalone, only when com-
bined with the other improvements. Moreover, it is a
very special feature given its computational overhead.
Developing a Successful Bomberman Agent
341
We had to turn SC off in the other algorithms, as it was
too costly to be beneficial there. However in Beam
Search, given the speed achieved by the bit-based en-
gine, computations above a certain threshold do not
transfer to the improved player’s strength meaning-
fully, making some computational power “free”.
Thus, even sacrificing half of the simulations per-
formed is worth obtaining a small improvement on
the win ratio, especially that this feature seems more
beneficial on the CodinGame arena than in the local
algorithm comparison.
7 EXPERIMENTS
We have performed a direct comparison of each algo-
rithm in its best-performing version we encoded. The
experiments were run using the cg-brutaltester tool
6
,
under the standard limitation of 100ms per game
round. Table 3 shows the results of one versus one
games, while in Table 4 we put results of three-player
games with all agents playing against each other.
As we can see, the advantage of the Beam Search
version is tremendous. However, the performance on
the three-player games is noticeably smaller, as these
games are more unpredictable. Although the Beam
Search approach was put the most consideration in
our development, even a plain version without en-
hancements easily scores above 80% against the other
two. Comparing MCTS and RHEA, the former per-
forms clearly better in both duels and three-player ex-
periments.
Table 3: Win percentages for each algorithm in 1 vs 1 set-
ting. A single cell shows the win ratio of the row agent
versus the column agent. Each pair of agents was evaluated
on 500 matches.
MCTS RHEA Beam Search
MCTS — 67.80% 2.20%
RHEA 22.40% — 1%
Beam Search 96.60% 99% —
Table 4: Win percentages of the algorithms in 1 vs 1 vs
1 setting. A single cell shows in how many games the
row agent obtained a higher score than the column agent.
Agents were evaluated on 1000 matches.
MCTS RHEA Beam Search
MCTS — 68.70% 10.30%
RHEA 23.80% — 3.70%
Beam Serach 84.20% 94.90% —
6
https://github.com/dreignier/cg-brutaltester
7.1 Agents Behavior
The Beam Search approach is definitely the most
successful and shows stable “inhuman” performance.
The complexity and depth of the search make analyz-
ing the games by humans very hard.
Thus, it is not possible to tell the reason a bot won
or lost in each game. Other algorithms are easier to
examine, as they sometimes show clear tendencies to
some unexpected behaviors.
For example, the MCTS agent feels a strong need
to place bombs every turn when it seems safe and it
does not see their clear use in the future. We have
to admit that we miserably failed to unlearn him this
quirk. On a serious note, despite the opponent’s pre-
diction, the MCTS agent still from time to time can be
trapped by the enemies bombs blocking his way out.
Also, given how the values computed by the evalua-
tion function influence the node selection in the UCT,
tuning the proper weights is much harder than for the
other two approaches.
On the other hand, RHEA suffers mostly from
highly influential nondeterminism. With unlucky ini-
tial sequences, it may waste many generations un-
til producing something useful (and each generation
is costly as any chromosome modification requires
reevaluation) or get stuck at some local optimum that
is very hard to get out of. This algorithm has a ten-
dency to often produce sequences with oscillating ac-
tions that are not so easy to prune because of the
unknown in advance bomb blast possibilities. Also,
because of the illegality of the produced action se-
quences, the actual search horizon is often signifi-
cantly smaller than the declared chromosome length.
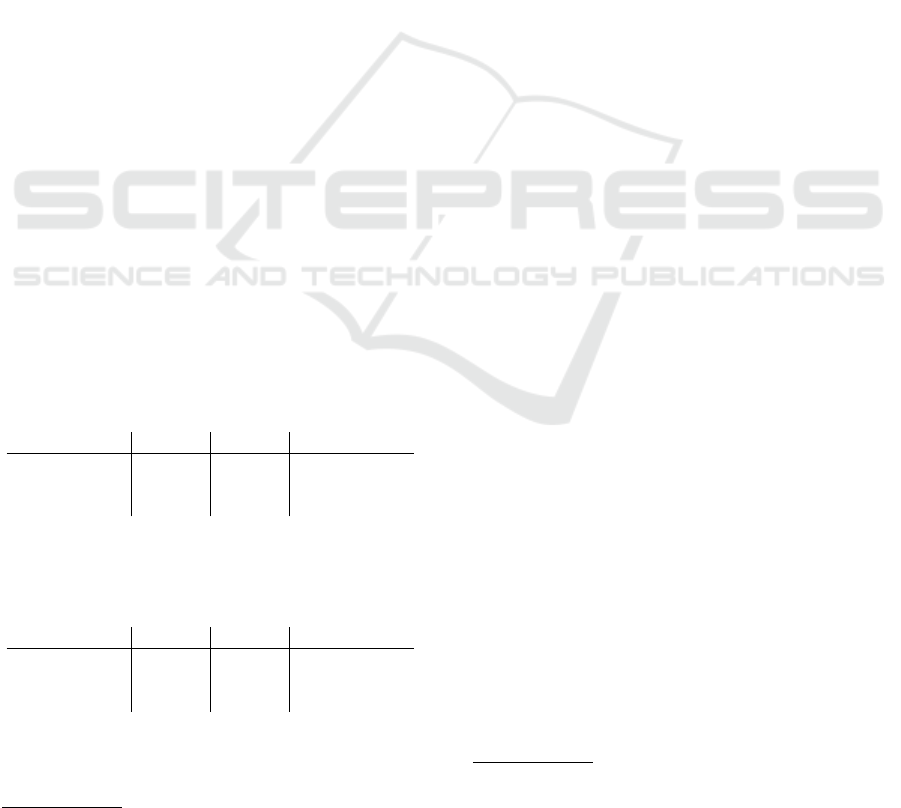
7.2 CodinGame Ranking
To present our work in a wider context, we show in
Figure 5 the results from the CodinGame Hypersonic
leaderboard
7
, with our best-performing Beam Search
agent ranked in the first place. Our agents based on
MCTS and RHEA were placed at positions 183 and
204 respectively. The agent scores are computed us-
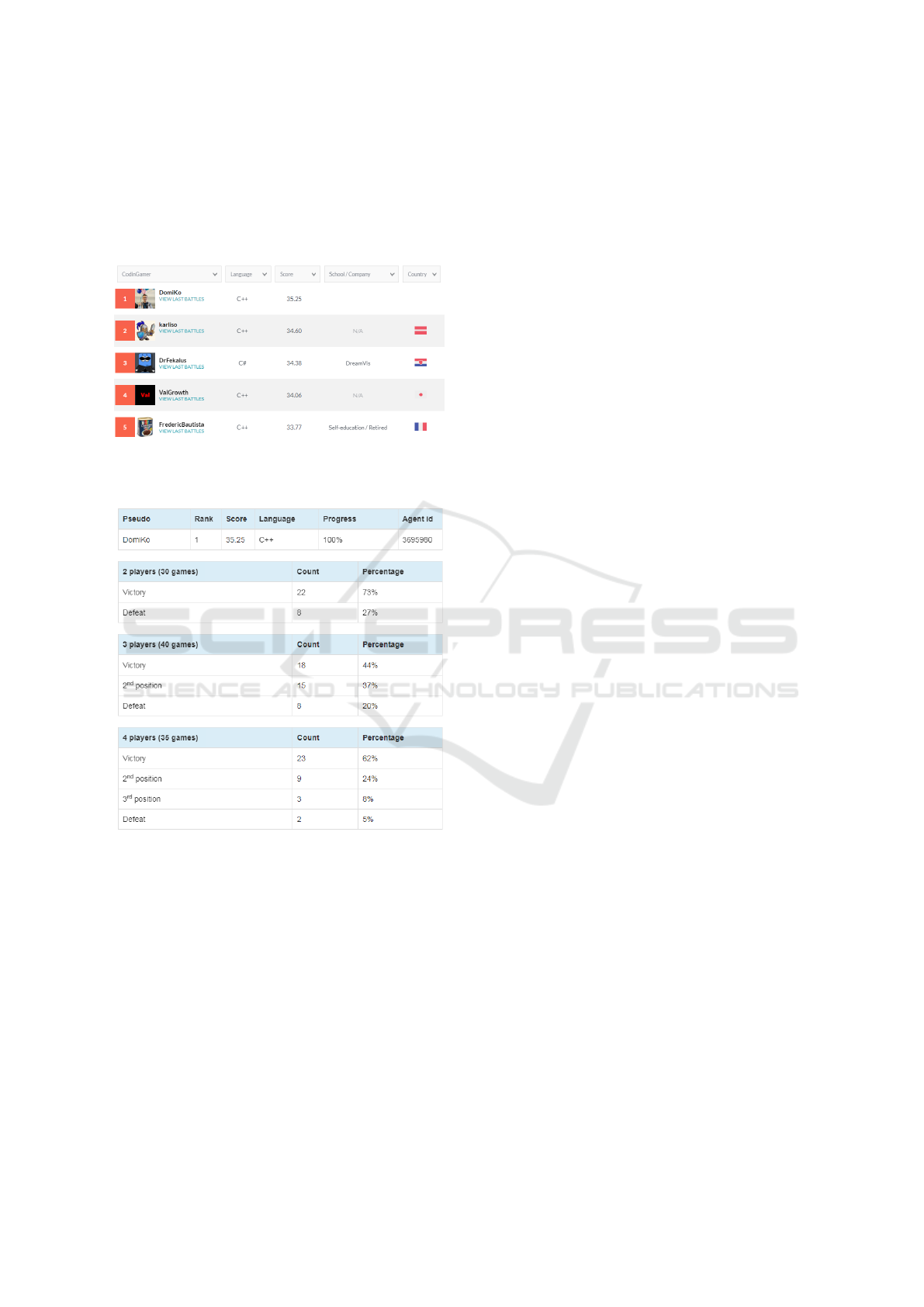
ing the True Skill algorithm. To show specific win-
rates of the agent, depending on the number of play-
ers, in Figure 6 we show an excerpt of the statistics
provided by the CGStats tool
8
.
The source code of our agents is not publicly
available. The CodinGame code of behavior forbids
posting full source codes to avoid copying it by other
members of the community. (Just to note that in Hy-
7
https://www.codingame.com/multiplayer/
bot-programming/hypersonic/leaderboard
8
http://cgstats.magusgeek.com/
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
342
personic many places in high legend are occupied by
the clones of one agent that broke this rule.) In the
future, we plan to release partial code that will con-
tain as much useful information as possible, without
providing an easy way to be copy-pasted as a working
agent.
Figure 5: A screenshot from the CodinGame Hypersonic
leaderboard (taken 29.11.2021), with our Beam Search al-
gorithm variant on the first position.
Figure 6: A screenshot from the CGStats showing detailed
win-rates depending on the number of players.
8 CONCLUSION
We presented our investigations over creating an
AI playing Hypersonic, a CodinGame adaptation of
Bomberman, that finally lead us to develop a top-
performing agent. Along the way, we tested few ap-
proaches, including various algorithms, engine codi-
fication, and components of the evaluation function.
In this paper, we show some of our findings that we
think might be useful for people applying described
algorithms for similar games.
Finally, we focused on a Beam Search with
low-level bit-based state representation and evalua-
tion function heavily relying on pruning unpromising
states using simulation-based estimation of survival.
Our best version of the algorithm was able to reach
the first position among the 2, 300 AI agents posted
on the CodinGame Hypersonic arena.
As future work, we plan to perform a more ex-
haustive parameter search to make sure the agent is
optimized against the other top leaderboard contes-
tants. In the extended version, we want to describe
in detail the bitwise state representation and how to
achieve constant-time blast propagation, as well as
provide more interesting figures regarding the behav-
ior of each of the algorithms tested and the influence
of particular elements of our evaluation function.
REFERENCES
Browne, C. B., Powley, E., Whitehouse, D., Lucas, S. M.,
Cowling, P. I., Rohlfshagen, P., Tavener, S., Perez, D.,
Samothrakis, S., and Colton, S. (2012). A Survey of
Monte Carlo Tree Search Methods. IEEE TCIAIG,
4(1):1–43.
Butt, P. (2016). Students’ perceptions of game-based learn-
ing using CodinGame. In International conference on
ICT in Education.
Campbell, M., Hoane, A. J., and Hsu, F. (2002). Deep Blue.
Artificial intelligence, 134(1):57–83.
Combéfis, S., Beresnevi
ˇ
cius, G., and Dagien
˙
e, V. (2016).
Learning programming through games and contests:
overview, characterisation and discussion. Olympiads
in Informatics, 10(1):39–60.
Dockhorn, A. and Mostaghim, S. (2019). Introduc-
ing the Hearthstone-AI Competition. arXiv preprint
arXiv:1906.04238.
Estaben, A., Díaz, C., Montoliu, R., and Pérez-Liebana,
D. (2020). TotalBotWar: A New Pseudo Real-time
Multi-action Game Challenge and Competition for
AI. arXiv preprint arXiv:2009.08696.
Finnsson, H. and Björnsson, Y. (2010). Learning simula-
tion control in general game-playing agents. In AAAI,
volume 24.
Gaina, R. D., Devlin, S., Lucas, S. M., and Perez-Liebana,
D. (2020). Rolling Horizon Evolutionary Algorithms
for General Video Game Playing. arXiv preprint
arXiv:2003.12331.
Gao, C., Hernandez-Leal, P., Kartal, B., and Taylor, M. E.
(2019). Skynet: A top deep rl agent in the inau-
gural pommerman team competition. arXiv preprint
arXiv:1905.01360.
Hudson Soft (1983). Bomberman.
Justesen, N., Mahlmann, T., and Togelius, J. (2016). Online
evolution for multi-action adversarial games. In Euro-
pean Conference on the Applications of Evolutionary
Computation, pages 590–603. Springer.
Developing a Successful Bomberman Agent
343

Kocsis, L. and Szepesvári, C. (2006). Bandit based monte-
carlo planning. In European conference on machine
learning, pages 282–293. Springer.
Kowalski, J. and Miernik, R. (2020). Evolutionary Ap-
proach to Collectible Card Game Arena Deckbuilding
using Active Genes. In IEEE CEC.
Lanctot, M., Lisý, V., and Winands, M. H. M. (2014).
Monte carlo tree search in simultaneous move games
with applications to goofspiel. In Computer Games,
pages 28–43. Springer.
Liu, J., Pérez-Liébana, D., and Lucas, S. M. (2016).
Rolling Horizon Coevolutionary planning for two-
player video games. In 2016 8th Computer Science
and Electronic Engineering (CEEC), pages 174–179.
Malysheva, A., Sung, T. T., Sohn, C.-B., Kudenko, D., and
Shpilman, A. (2018). Deep multi-agent reinforce-
ment learning with relevance graphs. arXiv preprint
arXiv:1811.12557.
Millington, I. and Funge, J. (2009). Artificial Intelligence
for Games. CRC Press.
Mnih, V., Kavukcuoglu, K., Silver, D., Rusu, A. A., Ve-
ness, J., Bellemare, M. G., Graves, A., Riedmiller, M.,
Fidjeland, A. K., Ostrovski, G., et al. (2015). Human-
level control through deep reinforcement learning. na-
ture, 518(7540):529–533.
Montoliu, R., Gaina, R. D., Pérez-Liebana, D., Delgado,
D., and Lucas, S. (2020). Efficient heuristic policy
optimisation for a challenging strategic card game. In
EvoSTAR, pages 403–418.
Ontanón, S., Synnaeve, G., Uriarte, A., Richoux, F.,
Churchill, D., and Preuss, M. (2013). A survey of
real-time strategy game AI research and competition
in Starcraft. IEEE TCIAIG, 5(4):293–311.
Osogami, T. and Takahashi, T. (2019). Real-time tree
search with pessimistic scenarios. arXiv preprint
arXiv:1902.10870.
Peng, P., Pang, L., Yuan, Y., and Gao, C. (2018). Contin-
ual match based training in Pommerman: Technical
report. arXiv preprint:1812.07297.
Perez, D., Samothrakis, S., Lucas, S., and Rohlfshagen, P.
(2013). Rolling horizon evolution versus tree search
for navigation in single-player real-time games. In
GECCO, pages 351–358.
Perez-Liebana, D., Gaina, R. D., Drageset, O., Ilhan, E.,
Balla, M., and Lucas, S. M. (2019a). Analysis of sta-
tistical forward planning methods in pommerman. In
AIIDE, volume 15, pages 66–72.
Perez-Liebana, D., Liu, J., Khalifa, A., Gaina, R. D., To-
gelius, J., and Lucas, S. M. (2019b). General Video
Game AI: a Multi-Track Framework for Evaluating
Agents, Games and Content Generation Algorithms.
IEEE Transactions on Games, 11(3):195–214.
Rabin, S. (2013). Game AI pro: collected wisdom of game
AI professionals. CRC Press.
Resnick, C., Eldridge, W., Ha, D., Britz, D., Foerster, J.,
Togelius, J., Cho, K., and Bruna, J. (2018). Pommer-
Man: A multi-agent playground. In MARLO Work-
shop, AIIDE-WS Proceedings, pages 1–6.
Rohlfshagen, P., Liu, J., Perez-Liebana, D., and Lucas,
S. M. (2017). Pac-man conquers academia: Two
decades of research using a classic arcade game. IEEE
Transactions on Games, 10(3):233–256.
Russell, S. J. and Norvig, P. (2020). Artificial Intelligence:
A Modern Approach. Pearson Education, 4 edition.
Samothrakis, S., Roberts, S. A., Perez, D., and Lucas, S. M.
(2014). Rolling horizon methods for games with con-
tinuous states and actions. In IEEE CIG, pages 1–8.
IEEE.
Schadd, M. P. D., Winands, M. H. M., van den Herik,
H. J., Chaslot, G. M. J. B., and Uiterwijk, J. W. H. M.
(2008). Single-Player Monte-Carlo Tree Search. In
Computers and Games, pages 1–12. Springer.
Schaeffer, J., Burch, N., Björnsson, Y., Kishimoto, A.,
Müller, M., Lake, R., Lu, P., and Sutphen, S. (2007).
Checkers is solved. science, 317(5844):1518–1522.
Silver, D., Huang, A., Maddison, C. J., Guez, A., Sifre, L.,
van den Driessche, G., Schrittwieser, J., Antonoglou,
I., Panneershelvam, V., Lanctot, M., Dieleman, S.,
Grewe, D., Nham, J., Kalchbrenner, N., Sutskever, I.,
Lillicrap, T., Leach, M., Kavukcuoglu, K., Graepel,
T., and Hassabis, D. (2016). Mastering the game of
Go with deep neural networks and tree search. Na-
ture, 529:484–503.
´
Swiechowski, M., Godlewski, K., Sawicki, B., and Ma
´
ndz-
iuk, J. (2021). Monte Carlo Tree Search: A Re-
view on Recent Modifications and Applications. arXiv
preprint arXiv:2103.04931.
Tesauro, G. (1994). Td-gammon, a self-teaching backgam-
mon program, achieves master-level play. Neural
computation, 6(2):215–219.
Togelius, J., Karakovskiy, S., and Baumgarten, R. (2010).
The 2009 Mario AI Competition. In IEEE CCEC,
pages 1–8. IEEE.
Vieira, R., Tavares, A. R., and Chaimowicz, L. (2020).
Drafting in collectible card games via reinforce-
ment learning. In Brazilian Symposium on Com-
puter Games and Digital Entertainment, pages 54–61.
IEEE.
Vinyals, O., Babuschkin, I., Czarnecki, W. M., Mathieu,
M., Dudzik, A., Chung, J., Choi, D. H., Powell, R.,
Ewalds, T., Georgiev, P., et al. (2019). Grandmaster
level in StarCraft II using multi-agent reinforcement
learning. Nature, 575(7782):350–354.
Zhou, H., Gong, Y., Mugrai, L., Khalifa, A., Nealen, A., and
Togelius, J. (2018). A hybrid search agent in pommer-
man. In FDG, pages 1–4.
Zhou, R. and Hansen, E. A. (2005). Beam-Stack Search: In-
tegrating Backtracking with Beam Search. In ICAPS,
pages 90–98.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
344
