
A Feature Engineering Focused System for Acoustic UAV Payload
Detection
Yaqin Wang
1
, Facundo Esquivel Fagiani
2
, Kar Ee Ho
1
and Eric T. Matson
1
1
Computer and Information Technology, Purdue University, West Lafayette, IN, U.S.A.
2
Renard Analytics, San Miguel de Tucum
´
an, Argentina
Keywords:
Audio Classification, UAV Classification, Machine Learning, Drone Security, Payload Detection, Acoustic
Classification, Neural Network, Feature Extraction.
Abstract:
The technology evolution of Unmanned Aerial Vehicles (UAVs) or drones, has made these devices suitable
for a wide new range of applications, but it has also raised safety concerns as drones can be used for carrying
explosives or weapons with malicious intentions. In this paper, Machine Learning (ML) algorithms are used
to identify drones carrying payloads based on the sound signals they emit. We evaluate and propose a feature-
based classification. Five individual features, and one combinations of features are used to train four different
standard machine learning models: SupportVector Machine (SVM), Gaussian Naive Bayes (GNB), K-Nearest
Neighbor (KNN) and a Neural Network (NN) model. The training and testing dataset is composed of sound
samples of loaded drones and unloaded drones collected by the team. The results show that the combination
of features outperforms the individual ones, with much higher accuracy scores.
1 INTRODUCTION
Unmanned Aerial Vehicles (UAVs), also called
drones, have seen an exponential increase in popu-
larity in recent years (Intelligence, 2021). As the
technology evolves, drones have become cheaper and
smaller, which allows a wide range of new applica-
tions, from filming sporting events to homeland secu-
rity, the possibilities are endless. On the negative side,
the increase accessibility to these devices also poses a
threat. Smaller and more potent UAVs allow them to
invade restricted zones without being detected, and to
carry potentially harmful payloads, such as weapons
and explosives. Alarming examples of UAV threats
can be cited, such as the case of a drone landing in-
side the perimeter of the U.S. White House in 2015
(Schmidt and Shear, 2015), the attacks to German
chancellor Angela Merkel in 2013 (Lee, 2013), and
Venezuelan president Nicol
´
as Maduro in 2018 (Koettl
and Marcolin, 2018). Under this context, it is of spe-
cial interest to be able to identify the presence of
loaded drones, since they usually represent a higher
risk than an unloaded drone.
The topic to be addressed in this study is the clas-
sification of loaded and unloaded drones, and acoustic
detection is the chosen approach. It is a cost-effective
solution, and despite the limitation in noise in the real
scenarios, such as bird singing or wind, (Case et al.,
2008). The acoustic method has provided promis-
ing results on drone sound classification (Bernardini
et al., 2017; Seo et al., 2018). Regarding loaded and
unloaded drone classification, when a drone carries a
payload, its rotors have to unfailingly increase the ro-
tational speed in order to keep its height, this produces
a different sound profile, which can potentially be
identified by an acoustic recognition model(Li et al.,
2018).
This study was developed from (Fagiani, 2021;
Wang et al., 2021), by using acoustic signals to detect
UAVs and to map their exact location. However, this
study focuses on using features (and combinations of
features) as inputs for the ML models, and compare
their performances. The selected feature extraction
methods include mfcc, chroma, mel, contrast,and ton-
netz (librosa Development Team, 2021). We also used
a combination of the five features to compare with
their individual performance. Features from these dif-
ferent methods are used to feed into four different
standard machine learning models: Support Vector
Machine (SVM), Gaussian Naive Bayes (GNB), K-
Nearest Neighbor (KNN) and a Neural Network (NN)
model. The dataset we use for training and testing was
collected by the team. The two drones that are used
to collect audio recordings are DJI Phantom 4 and an
470
Wang, Y., Fagiani, F., Ho, K. and Matson, E.
A Feature Engineering Focused System for Acoustic UAV Payload Detection.
DOI: 10.5220/0010843800003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 3, pages 470-475
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

EVO 2 Pro.
The contribution of this paper is to provide an al-
ternative approach in building an audio-based payload
classification for drones, using feature extraction. We
also built a small size drone audio database that will
be available to the public. We used the same ML
model structures for different feature extraction set-
tings, and the results showed that the combination
of features have a better performance than individual
ones. The rest of this paper is organized in the sec-
tions as follow. Section 2 reviews the current sound
detection methods for drone classification, and the
payload classification. Section 3 shows the methodol-
ogy proposed for the feature extraction methods and
three different ML models. Section 4 describes our
experiments and results. Lastly, section 5 presents the
conclusion and future works.
2 LITERATURE REVIEW
2.1 Sound Recognition Solution
A variety of methods have been provided to detect
drones using sound detection (Mezei et al., 2015; Jeon
et al., 2017; Fagiani, 2021; Kim et al., 2017). The
rotation of the drone’s rotor blades create an audible
signature that can be sensed and recorded, even within
the range of human hearing, but the question is if and
how these signatures can be distinguished from other
sounds. In one particular study, two different methods
to achieve drone sound detection included mathemat-
ical correlation and audio fingerprinting (Mezei et al.,
2015).
In the first case, the researchers employed a
method similar to global positioning systems (GPS)
work. To apply this methodology to the sound of
drones, the researchers created a library of sounds
by taking audio recordings of a lawnmower, hair
dryer, music, a model airplane, and two drones.
The sounds were dismantled to isolate their indi-
vidual components. The samples were then com-
pared through the process of correlation using two
techniques: Pearson’s correlation coefficient and nor-
malized maximum correlation. In summary, the
researchers demonstrated that the correlation tech-
niques worked with the system correctly identifying
the drones sounds versus other sounds at a level of
65.6% and 77.9% accuracy. For reference, the drone
sounds were recorded at a distance of approximately
3 meters or less and in a relatively sound proof room.
In the second case, the researchers employed a
technique called audio fingerprinting, which is ba-
sically the algorithm that operates the popular mo-
bile device application called Shazam. Shazam op-
erates by allowing the user to record a short audio
sample from the ambient sound of a song playing
nearby using the mobile device’s built-in microphone.
To simulate this capability, the researchers used an
open source tool called MusicG from GitHub. Then
they recorded samples of drone sounds, but this time
within 1 meter distance and again in a sound con-
trolled room. Overall, the researchers found both
methods to achieve acceptable results. Future work
intends to overcome limitations with regards to equip-
ment quality and distance from subject to micro-
phone.
Another promising study to detect drone sounds
was conducted by (Jeon et al., 2017) using MFCC
with GMM and two types of deep neural networks
(DNN), convolutional neural network (CNN) and re-
current neural network (RNN). The unique aspect of
this research was the emphasis on using polyphonic
sound data from real-life environments. In other
words, the focus was on identifying and classifying
drone sounds from a diverse background of compet-
ing noises in the environment. One significant chal-
lenge that the research team faced was the paucity
of publicly available drone sound data. To remedy
this problem, the team implemented a novel technique
by synthesizing tracks of drone sounds with tracks
of background noise to create a coherent audio clip.
In this case, the sample drone sounds were gener-
ated from DJI Phantom 3 and Phantom 4, with the
background noise of people talking, car traffic, and
airplane noise. The drone sounds were recorded at
distances of 30m, 70m, and 150m while both hov-
ering and approaching. Overall, RNN achieved the
best performance with F-score being (RNN > CNN
> GMM: 0.8809 > 0.6451 > 0.5232) coming from
240 ms of audio input. Precision and recall were also
highest with RNN at (0.7953, 0.8066).
In (Kim et al., 2017), the researchers sought to de-
velop a real-time drone detection and analysis sys-
tem using sound data from DJI Phantom 1 and 2
drones and environmental noise from a European
football stadium. Two different machine learning al-
gorithms were employed. The plotted image machine
learning (PIL) technique resulted in 83% accuracy
and K-nearest neighbor (KNN) achieved 61% accu-
racy. These self-learning techniques also resulted in
improvements of detection efficiency as well. The
downsides of using PIL is that it requires large data
sets and has a tendency to reveal bias in the result.
For KNN, the limitation includes a difficulty to distin-
guish between similar but different drone targets, de-
spite it being a fast and simple approach. The study’s
intent to produce a general UAV detection system
A Feature Engineering Focused System for Acoustic UAV Payload Detection
471

were also limited by not being able to test both al-
gorithms with the same drone types.
2.2 Loaded and Unloaded Drones
Recognition
In recent years, drones are becoming more and more
popular in both recreational and commercial pur-
poses. A micro-drone is relatively cheap and not too
difficult to use. It can be used for recreational ac-
tivities, such as filming, as well as in farming, pack-
age deliveries, and more (Ritchie et al., 2017; Pallotta
et al., 2020). However, the popularity of using drones
has led to potential criminal and dangerous activities,
including privacy invasion, illegal flying in restricted
areas such as airports, interference in public events,
and terrorist attacks with armed drones. Hence, to
detect and classify drones with different payloads is
crucial in terms of security and safety.
There are only limited number of research in the
topic of loaded drones recognition, and most of them
are focusing on using micro-Doppler radar to de-
tect and classify loaded and unloaded drones (Ritchie
et al., 2017; Pallotta et al., 2020). Palotta et al. pro-
posed a new micro-Doppler feature extraction proce-
dure based on spectral kurtosis to classify UAVs with
different payloads. Both of the narrowband and wide-
band spectrograms from the radar are used in calculat-
ing spectral kurtosis, which is used as input to a classi-
fier after a dimensionality reduction stage using prin-
cipal component analysis (PCA). They have reached
an average accuracy of 92.61% for different payloads
on the proposed feature extraction procedure.
3 METHODOLOGY
In order to evaluate using feature-based methods for
UAV’s payload classification, we compared features
and ML methods. Using UAV audio recording files
as input, we extracted five features (mfcc, chroma,
mel, contrast, and tonnetz). In addition one combi-
nations of these features is used. These 5 individual
and 1 combinations of features are used to train four
ML models. We compared four different ML models,
which are SVM, GNB, KNN and NN.
We used a DJI Phantom 4 and an EVO 2 Pro
to collect audio recordings, with and without pay-
load. UAV samples were collected at McAllister Park,
Lafayette, IN, 47904. We collected a total of 1232
number of samples for loaded and unloaded data, for a
total of 204.5 minutes long, as shown in Table 1. The
payload we used for both UAVs is a bottle of water
with 500ml capacity, which is about 16.9 oz. All the
Table 1: UAV Audio Recording Data.
UAV Type Quantity Total Time
Loaded DJI Phantom 4 343 57.16 min
Unloaded DJI Phantom 4 302 50.33 min
Loaded EVO 2 Pro 297 49.50 min
Unloaded EVO 2 Pro 290 48.33 min
Total 1232 204.5 min
Table 2: Feature Extraction Methods.
Feature Shape
chroma stft 12
chroma cqt 12
chroma cqt 12
mel 128
mfcc 40
rms 1
centroid 1
bandwidth 1
contrast 7
flatness 1
bandwidth 1
rolloff 1
poly shape 2
tonnetz 6
zero crossing 1
data processing and ML models training are done on
a Macbook Air, with 1.1 GHz Quad-Core Intel Core
i5 and 8 GB memory.
3.1 Features Extraction
When a human is asked to identify the sound of an ob-
ject, they might try to recognize melodic or rhythmic
patterns and use them to differentiate them, e.g. traffic
sounds, bird singing, and music. Using features for
classification may provide “explanations” to under-
stand on how the ML classification was produced. In
analyzing and preparing audio files for machine learn-
ing training, the process of learning the patterns is fea-
ture extraction. In this project, we used the python
library, Librosa, for audio feature processing (librosa
Development Team, 2021).
Table 2 shows 12 different feature extraction tools
in Librosa (librosa Development Team, 2021). The
right column is the number of features on each
method calculated. All of the feature extraction meth-
ods in this table are spectral features except the last
two, which are rhythmic features. Spectral features
represent sound based on the amount of vibration at
each individual frequency.
Among the 12 different extraction methods, we re-
moved the ones with the shape of 1 or 2 because indi-
vidually they would not provide enough information
for classification purposes. The selected methods in-
clude: mfcc, mel, contrast, chroma, and tonnetz. We
explored the individual features and the combination
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
472
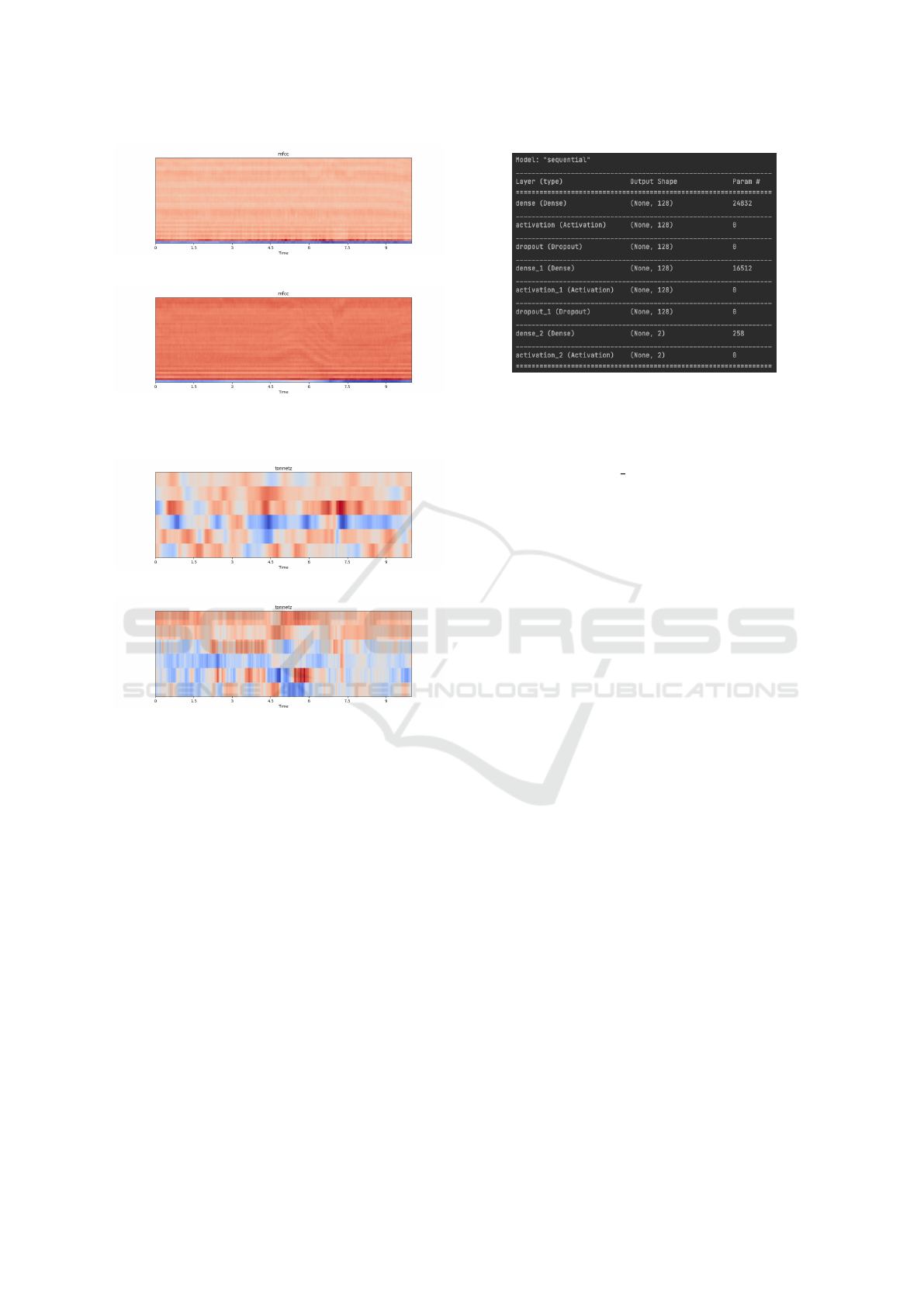
(a) Loaded drone mfcc.
(b) Unloaded drone mfcc.
Figure 1: MFCC Feature Plot.
(a) Loaded drone tonnetz.
(b) Unloade drone tonnetz.
Figure 2: Tonnetz Feature Plot.
of them to see how they perform with different ma-
chine learning models. By using the Librosa feature
extraction methods, the features from the audio files
are saved into numpy array format.
It is difficult for a human to see and understand
how these features (a vector of numbers) represent the
audio features. Spectral display functions enable vi-
sualization of the features. Figure 1 and Figure 2 com-
pare the visualized feature between two audio record-
ings from loaded and unloaded drones. It is visually
obvious that the two audio files are different in sound.
3.2 ML Models
The four models used for training are: SVM, GNB,
KNN, and neural network (NN). In these three linear
models, we used all default settings for all parameters.
The neural network has 3 dense layers, 2 activation
layers, and 2 dropout layers, as shown in Figure 3.
Figure 3: Neural Network Model Structure.
In the SVM model, the parameter C is set to 10,
and the kernel we chose is linear. For GNB model, we
used all default parameters for model training. And in
KNN, the parameter n neighbors is set to 6, with all
other ones as default.
4 EXPERIMENTS AND RESULTS
4.1 Experiments
The loaded and unloaded drones audio recordings
dataset contains 1232 samples, and each one of them
has a sample length of 10 seconds. Experiments on
the dataset we collected will provide valid informa-
tion about which feature extraction method or combi-
nation works the best, as well as which machine learn-
ing model has the best performance.
The features of each recording under different
category are calculated and extracted first, and then
saved in the form of numpy arrays. Five individual
features are extracted, as well as one combination.
The extracted features are the input for the machine
learning models. The models will learn the features
from the audio files, not the raw audio data. Once the
training is done, the program evaluates the model, and
provides a test accuracy score. We split the dataset in
70% training and 30% testing then report and com-
pare on the test accuracy, recall, precision and F-1
score.
4.2 Results
Table 3 shows the results for model SVM. We cal-
culated and extracted individual features and combi-
nations described above. Accuracy on combination
of features has an obvious increase compared to in-
dividual ones. MFCC outperforms the other individ-
ual features with the highest accuracy and F-1 score.
A Feature Engineering Focused System for Acoustic UAV Payload Detection
473

Table 3: Test Results for SVM.
Feature Accuracy Recall Precision F-1
1. chroma 0.965 1.000 0.989 0.995
2. mel 0.914 0.984 0.864 0.920
3. mfcc 0.986 1.00 0.988 0.986
4. contrast 0.786 0.818 0.773 0.795
5. tonnetz 0.676 0.722 0.665 0.692
Combo 0.992 1.00 1.00 1.00
Table 4: Test Results for GNB.
Feature Accuracy Recall Precision F-1
1. chroma 0.924 0.850 1.00 0.919
2. mel 0.924 1.000 0.870 0.930
3. mfcc 0.997 1.000 0.995 0.997
4. contrast 0.546 0.107 0.952 0.192
5. tonnetz 0.689 0.765 0.668 0.713
Combo 0.997 1.000 0.995 0.997
Table 5: Test Results for KNN.
Feature Accuracy Recall Precision F-1
1. chroma 0.995 0.995 0.995 0.995
2. mel 0.954 0.947 0.962 0.954
3. mfcc 0.989 0.989 0.989 0.989
4. contrast 0.800 0.790 0.780 0.770
5. tonnetz 0.708 0.781 0.684 0.730
Combo 0.989 0.984 0.995 0.989
Table 6: Test Results for NN.
Feature Accuracy Recall Precision F-1
1. chroma stft 0.924 0.850 1.00 0.919
2. mel 0.924 1.000 0.870 0.930
3. mfcc 0.997 1.000 0.995 0.997
4. contrast 0.546 0.107 0.952 0.192
5. tonnetz 0.689 0.765 0.668 0.713
Combo 0.997 1.000 0.995 0.997
Chroma feature also performs well with a recall of 1.
Table 4 shows the test results for the model GNB.
Accuracy on combination of features has the best per-
formance in accuracy and all other scores. MFCC and
Mel are the two best individual features with the high-
est accuracy scores. Chroma also has very high accu-
racy, precision and F-1 score, but a relatively lower
recall.
Table 5 shows the results for model KNN. Sur-
prisingly, chroma feature outperforms the others, in-
cluding the combination features. The combination
feature has a slightly lower accuracy score, but still
promising.
Table 6 shows the results for the neural network
(NN) model. The combination features and MFCC
have the same accuracy, recall, precision and F-1
score. Chroma and Mel have similar performance.
In all four machine learning models, the combina-
tion of features has the better performance compared
to individual ones. MFCC is the best individual fea-
ture method for SVM, GNB and NN, while chroma
performs the best in KNN.
5 CONCLUSION AND FUTURE
WORKS
This paper explored five different feature extraction
methods and a combination to classify whether a
drone carries payload. The five selected feature ex-
traction methods are chroma, mel, mfcc, contrast, and
tonnetz, and the combinations of the five individual
ones is also applied and evaluated. Features of each
audio recording under each category (loaded and un-
loaded) are calculated and saved. The four machine
learning models that we we used for trainings are
SVM, GNB, KNN, and a Neural Network. Those
saved features are used as input to feed into the train-
ing models. The dataset was collected and labeled by
using two different brands and models of the drones.
The dataset includes 1232 audio samples of loaded
and unloaded drones. The results show that the com-
bination of features have a better performance than in-
dividual ones. The combination feature reaches about
99% average accuracy in all four ML models. The
best individual features are MFCC and chroma for all
four ML models. Our method of feature combina-
tion outperforms the research of Palotta et al, with the
average accuracy of 92.61%. And our approach re-
quires fewer computational resources, and has higher
explainability.
The limitations of our method include that we only
used the same payload for all data collecting. Also the
amount of data we have is sufficient for current re-
search purpose, but we will need more data for more
general UAV payload detection with different manu-
factures and models. We may need to increase the
complexity of the ML models after collecting more
data. With more effort in the future, accuracy is ex-
pected to improve with more data and optimized mod-
els.
ACKNOWLEDGEMENT
The authors appreciate the support and guidance from
Dr. Eric Matson.
REFERENCES
Bernardini, A., Mangiatordi, F., Pallotti, E., and Capodi-
ferro, L. (2017). Drone detection by acoustic signature
identification. Electronic Imaging, 2017(10):60–64.
Case, E. E., Zelnio, A. M., and Rigling, B. D. (2008). Low-
cost acoustic array for small uav detection and track-
ing. In 2008 IEEE National Aerospace and Electron-
ics Conference, pages 110–113. IEEE.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
474

Fagiani, F. E. (2021). UAV detection and lo-
calization system using an interconnected array
of acoustic sensors and machine learning al-
gorithms. Master thesis, Purdue University.
https://doi.org/10.25394/PGS.14502759.v1.
Intelligence, I. (2021). Drone market outlook in 2021:
industry growth trends, market stats and forecast,
“https://www.businessinsider.com/drone-industry-
analysis-market-trends-growth-forecasts”, (accessed
August 2021).
Jeon, S., Shin, J.-W., Lee, Y.-J., Kim, W.-H., Kwon, Y., and
Yang, H.-Y. (2017). Empirical study of drone sound
detection in real-life environment with deep neural
networks. In 2017 25th European Signal Processing
Conference (EUSIPCO), pages 1858–1862. IEEE.
Kim, J., Park, C., Ahn, J., Ko, Y., Park, J., and Gallagher,
J. C. (2017). Real-time uav sound detection and anal-
ysis system. In 2017 IEEE Sensors Applications Sym-
posium (SAS), pages 1–5. IEEE.
Koettl, C. and Marcolin, B. (August 10th, 2018). “A closer
look at the drone attack on maduro in venezuela,
“https://www.nytimes.com/2018/08/10/world
/americas/venezuela-video-analysis.html”, (accessed
August 2021).
Lee, T. B. (September 18th, 2013). Watch the pirate
party fly a drone in front of germany’s chance,
“https://www.washingtonpost.com/news/the-switch/
wp/2013/09/18/watch-the-pirate-party-fly-a-drone-in-
front-of-germanys-chancellor/”, (accessed August
2021).
Li, S., Kim, H., Lee, S., Gallagher, J. C., Kim, D., Park,
S., and Matson, E. T. (2018). Convolutional neu-
ral networks for analyzing unmanned aerial vehicles
sound. In 2018 18th International Conference on Con-
trol, Automation and Systems (ICCAS), pages 862–
866. IEEE.
librosa Development Team (2021). Feature extraction,
“https://librosa.org/doc/main/feature.html”, (accessed
August 2021).
Mezei, J., Fiaska, V., and Moln
´
ar, A. (2015). Drone sound
detection. In 2015 16th IEEE International Sympo-
sium on Computational Intelligence and Informatics
(CINTI), pages 333–338. IEEE.
Pallotta, L., Clemente, C., Raddi, A., and Giunta, G. (2020).
A feature-based approach for loaded/unloaded drones
classification exploiting micro-doppler signatures. In
2020 IEEE Radar Conference (RadarConf20), pages
1–6. IEEE.
Ritchie, M., Fioranelli, F., Borrion, H., and Griffiths, H.
(2017). Multistatic micro-doppler radar feature ex-
traction for classification of unloaded/loaded micro-
drones. IET Radar, Sonar & Navigation, 11(1):116–
124.
Schmidt, M. S. and Shear, M. D. (January
26th, 2015). A drone, too small for
radar to detect, rattles the white house,
“https://www.nytimes.com/2015/01/27/us/white-
house-drone.html”, (accessed August 2021).
Seo, Y., Jang, B., and Im, S. (2018). Drone detection us-
ing convolutional neural networks with acoustic stft
features. In 2018 15th IEEE International Confer-
ence on Advanced Video and Signal Based Surveil-
lance (AVSS), pages 1–6. IEEE.
Wang, Y., Fagiani, F. E., Ho, K. E., and Matson, E. T.
(2021). A feature engineering focused system for
acoustic uav detection. In ccecpted for Publica-
tion International Conference on Robotic Computing
(IRC2021). IEEE.
A Feature Engineering Focused System for Acoustic UAV Payload Detection
475
