
An Implemented System for Cognitive Planning
Jorge Fernandez
1 a
, Dominique Longin
2 b
, Emiliano Lorini
2 c
and Frédéric Maris
1 d
1
IRIT, Toulouse University, France
2
IRIT, CNRS, Toulouse University, France
Keywords:
Knowledge Representation, Epistemic Logic, Satisfiability, Epistemic Planning, Cognitive Planning,
Persuasion.
Abstract:
We present a system that implements a framework for cognitive planning. The system allows us to represent
and reason about the beliefs, desires and intentions of other agents using an NP-fragment of a multiagent
epistemic logic. The system has three components: the belief revision, the planning and the translator modules.
They work in an integrated way to firstly capture new information about the world, secondly to plan a sequence
of speech acts aimed at achieving a persuasive goal and, finally, to verify satisfiability of the formulas generated
at each step of the process. We illustrate how our system can be used to implement a persuasive artificial agent
interacting with a human user.
1 INTRODUCTION
Automated planning is at the center of AI research
with a variety of applications ranging from control
traffic and robotics to logistics and services. Epis-
temic planning extends automated planning incorpo-
rating notions of knowledge and beliefs (Bolander
and Andersen, 2011; Löwe et al., 2011; Kominis
and Geffner, 2015; Muise et al., 2015; Cooper et al.,
2021). Cognitive planning is a generalization of epis-
temic planning, where the goal to be achieved is not
only a belief state but a cognitive state of a target in-
cluding not only beliefs but also intentions. More-
over, we are particularly interested in persuasive goals
of the planning agent, aimed at influencing another
agent’s beliefs and intentions.
The increasing number of applications in social
robotics, social networks, virtual assistants together
with sentiment analysis techniques allow us to col-
lect data related to humans’ beliefs and intentions. In
(Akimoto, 2019) a framework for modeling mental
attitudes of an agent, based on her narratives, is pro-
posed. In addition, cognitive models can be used to
predict agents’ decision-making by taking psycholog-
ical factors like motivation and emotions into account
(Prezenski et al., 2017). Nonetheless, few approaches
a
https://orcid.org/0000-0001-9328-1670
b
https://orcid.org/0000-0002-3138-2262
c
https://orcid.org/0000-0002-7014-6756
d
https://orcid.org/0000-0002-1084-1669
exist which leverage this information about humans’
cognitive states for changing their attitudes and be-
haviors through persuasion.
Our work aims to fill this gap by introducing a
system
1
based on a simple framework detailed in
(Fernandez et al., 2021) in which we can represent
an agent’s cognitive state in a compact way, rea-
son about it and planning a sequence of speech acts
aimed at changing it. Our approach is based on an
epistemic logic introduced in (Lorini, 2018; Lorini,
2020), which allows us to represent an agent’s ex-
plicit beliefs, as the information in the agent’s belief
base, and the agent’s implicit beliefs, as the informa-
tion which is deducible from the agent’s belief base.
Given that the satisfiability problem for the full logic
is PSPACE-hard, we focus on an NP-fragment that
makes the logic suitable for implementing real-world
applications.
The core components of the system are the belief
revision, the planning and the translator modules. The
formulas representing the rules and constraints for a
specific problem domain are loaded into the system.
We encode these rules using the NP-fragment pre-
sented in (Fernandez et al., 2021). The system takes
this information as the initial state and some actions
— which are of type speech act — to build a plan
that leads to the goal. An important feature is that
actions have preconditions that impose constraints on
their execution order. We illustrate the implementa-
1
https://github.com/CognitivePlanning/sw
492
Fernandez, J., Longin, D., Lorini, E. and Maris, F.
An Implemented System for Cognitive Planning.
DOI: 10.5220/0010846300003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 3, pages 492-499
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

tion of our system in a human-machine interaction
(HMI) scenario in which an artificial agent has to per-
suade a human agent to practice a sport based on her
preferences.
2 A LANGUAGE FOR EXPLICIT
AND IMPLICIT BELIEF
This section describes the basics of the Logic of Dox-
astic Attitudes (LDA) introduced in (Lorini, 2018;
Lorini, 2020). It is a multiagent epistemic logic which
supports reasoning about explicit and implicit beliefs.
Assume a countably infinite set of atomic proposi-
tions Atm and a finite set of agents Agt = {1, . . . , n}.
We define the language in two steps.
We first define the language L
0
(Atm, Agt) by the
following grammar in Backus-Naur Form (BNF):
α ::= p | ¬α | α
1
∧ α
2
| α
1
∨ α
2
| 4
i
α,
where p ranges over Atm and i ranges over Agt.
L
0
(Atm, Agt) is the language for representing agents’
explicit beliefs. The formula 4
i
α is read “i explicitly
believes that α”. The language L(Atm, Agt) extends
the language L
0
(Atm, Agt) by modal operators of im-
plicit belief and is defined by the following grammar:
ϕ ::= α | ¬ϕ | ϕ
1
∧ ϕ
2
| ϕ
1
∨ ϕ
2
|
i
ϕ | ♦
i
ϕ,
where α ranges over L
0
(Atm, Agt) and i ranges over
Agt. For notational convenience we write L
0
instead
of L
0
(Atm, Agt) and L instead of L(Atm, Agt), when
the context is unambiguous. The formula
i
ϕ is read
“i implicitly believes that ϕ” and ♦
i
ϕ is read “ϕ is
compatible (or consistent) with i’s explicit beliefs”.
The other Boolean constructions >, ⊥, → and ↔ are
defined in the standard way.
The language is interpreted with respect to a for-
mal semantics using belief bases whose details are
given in (Lorini, 2018; Lorini, 2020). Checking sat-
isfiability of L formulas relative to this semantics is a
PSPACE-hard problem. For that reason, in (Fernan-
dez et al., 2021), we looked for an interesting NP-
fragment of L that we called L
Frag
:
ϕ ::= α | ¬ϕ | ϕ
1
∧ ϕ
2
| ϕ
1
∨ ϕ
2
|
m
α | ♦
m
α,
where α ranges over L
0
and m is a special agent in Agt
called the ‘machine’. In L
Frag
, all agents have explicit
beliefs but only agent m has implicit beliefs. There-
fore, formulas including nesting implicit belief oper-
ators are not allowed (e.g.,
m
¬
m
p is not a well-
formed formula). Moreover the latter are restricted to
L
0
formulas of type α.
Agent m is the artificial planning agent. In order
to represent agents’ belief dynamics, language L
Frag
L
+
Frag
red
99K L
Frag
nnf
99K L
NNF
Frag
tr
1
99K L
Mod
tr
2
99K L
Prop
Figure 1: Summary of reduction process.
is extended by belief expansion operators. Such an
extension will allow us to represent the actions of
the planning agent in the cognitive planning prob-
lem. Specifically, we introduce the following lan-
guage L
+
Frag
:
ϕ ::=α|¬ϕ|ϕ
1
∧ϕ
2
|ϕ
1
∨ϕ
2
|
m
α|♦
m
α|[+
i
α]ϕ,
where α ranges over L
0
and i ranges over Agt. The
formula [+
i
α]ϕ is read “ϕ holds after agent i has pri-
vately expanded her belief base with α”. Event of
type +
i
α are generically called informative actions.
3 COGNITIVE PLANNING
The planning problem in the context of the logic L
+
Frag
is to find a sequence of informative actions for agent
m of type +
m
α which guarantees that agent m will
knowingly achieve its goal. Let Act
m
= {+
m
α : α ∈
L
0
} be agent m’s set of informative actions and let the
elements of Act
m
be noted ε, ε
0
, . . . Agent m’s infor-
mative actions have executability preconditions that
are specified by the following function: P : Act
m
−→
L
Frag
. So, we can define the following operator of suc-
cessful occurrence of an informative action:
hhεiiϕ
def
= P (ε)∧ [ε]ϕ
with ε ∈ Act
m
. The formula hhεiiϕ has to be read
“agent m’s informative action ε can take place and ϕ
holds after its occurrence”.
Informative actions of type ‘speech act’ are of in-
terest here. In particular, we consider speech acts
of type ‘to inform’, where m is assumed to be the
speaker and j ∈ Agt such that j 6= m is assumed to be
the hearer. We define the speech act “agent m informs
agent j that α” as follows:
inform(m, j,α)
def
= +
m
4
j
α.
In (Fernandez et al., 2021) the planning problem
is defined as a tuple hΣ, Op, α
G
i where:
• Σ ⊂ L
0
is a finite set of agent m’s available infor-
mation,
• Op ⊂ Act
m
is a finite set of agent m’s operators,
• α
G
∈ L
0
is agent m’s goal.
The planning problem has a solution if the formula
¬
(
V
α∈Σ
m
α) → hhε
1
ii . . . hhε
k
ii
m
α
G
is unsatisfi-
able. Checking plan existence for a L
+
Frag
-planning
problem is in NP
NP
= Σ
P
2
.
An Implemented System for Cognitive Planning
493
In Algorithm 1, plan
L
+
Frag
[k, i] (line 8) is the i can-
didate plan of size k, generated from the following
elements: the belief base, the i subset in the set of
combinations C of size k from Op and the goal.
Algorithm 1: Cognitive planning.
Data: Σ
base
, Op, α
G
Result: Plan
1 Begin
2 Function combinations (Op,k)
3 C = All subsets of size k from Op;
4 return C
5 Function generatePlans (k)
6 C ← combinations(Op, k);
7 for i ← 1 to |C| do
8 plan
L
+
Frag
[k, i] =
¬(
m
Σ
base
→ [+
m
C[i]]
m
α
G
)
9 plan
L
Prop
[k, i] =
Translator(plan
L
+
Frag
[k, i])
10 if TouIST(plan
L
Prop
[k, i]) =
UnSAT then
11 Print “Plan i of size k is
valid” ;
12 success ← true;
13 return
14 end if
15 end for
16 return
17 Main
18 k = 1 ;
19 success ← false;
20 while (k <= |Op| || not(success)) do
21 generatePlans(k);
22 k ++;
23 end while
24 if not(success) then
25 Print “Plan not found” ;
26 end if
27 exit
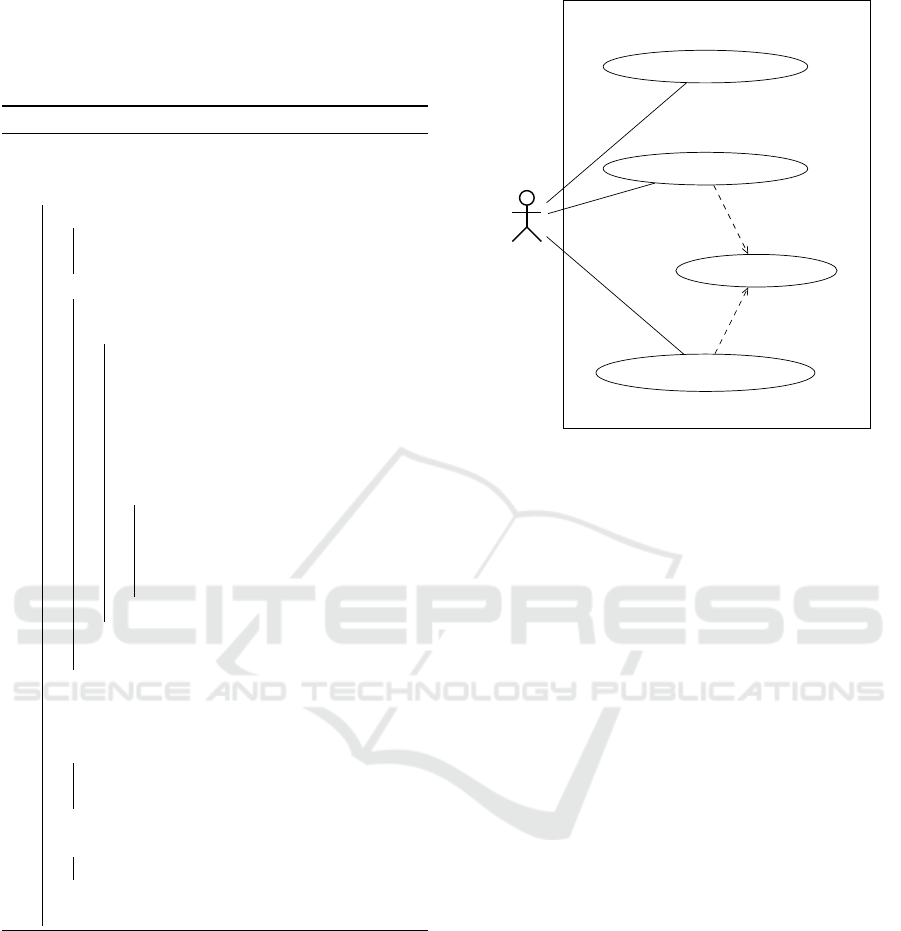
4 IMPLEMENTATION
The functionality of our integrated system for cogni-
tive planning is defined by the use case presented in
Figure 2.
Its two core modules are belief revision and cog-
nitive planning which work in an integrated way.
Firstly, the belief revision module reads the input,
coming from the human through the graphical user
interface (GUI) for dialog, and verifies that this input
does not contradict the core beliefs stored in the belief
Artificial Agent
Artificial Agent
include
include
GUI
Belief revision
Translations
Cognitive Planning
User
Figure 2: Use Case Artificial Agent.
base. Core beliefs are fundamental beliefs that never
change and are distinguished from volatile beliefs that
can change due to revision. If the input is in contra-
diction with the core beliefs, then the input is rejected
and the belief base is not updated. On the contrary, if
the input is not in contradiction with the core beliefs,
then the belief base is revised using a maximal con-
sistent subset (MCS) approach whereby the input has
priority over the old volatile beliefs.
Secondly, the planning module reads the initial
state, the set of actions, and the goal and starts to gen-
erate candidate plans of different size, starting with
size equal to one. During this phase, the planning
module calls the translator module which converts the
L
+
Frag
planning formula into its equivalent in propo-
sitional logic, following the sequence of reductions
detailed in Figure 1. After the reduction process per-
formed by the translator, the planning module exe-
cutes the SAT encoding tool TouIST (Fernandez et al.,
2020) to verify the validity of the propositional for-
mula. TouIST will encode the formula in CNF format
and send it to MiniSAT (this solver is set by default
in the application) for checking satisfiability. TouIST
can work with external solvers that accept standard-
ized DIMACS as input language. Figure 3 shows the
proposed system architecture.
In order to probe the potential of our implemented
system for cognitive planning we applied it to a HMI
scenario detailed in (Fernandez et al., 2021). In this
scenario agent m is the artificial assistant of the hu-
man agent h. Agent h has to choose a sport to prac-
tice since her doctor recommended her to do a regular
physical activity to be in good health. Agent m’s aim
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
494
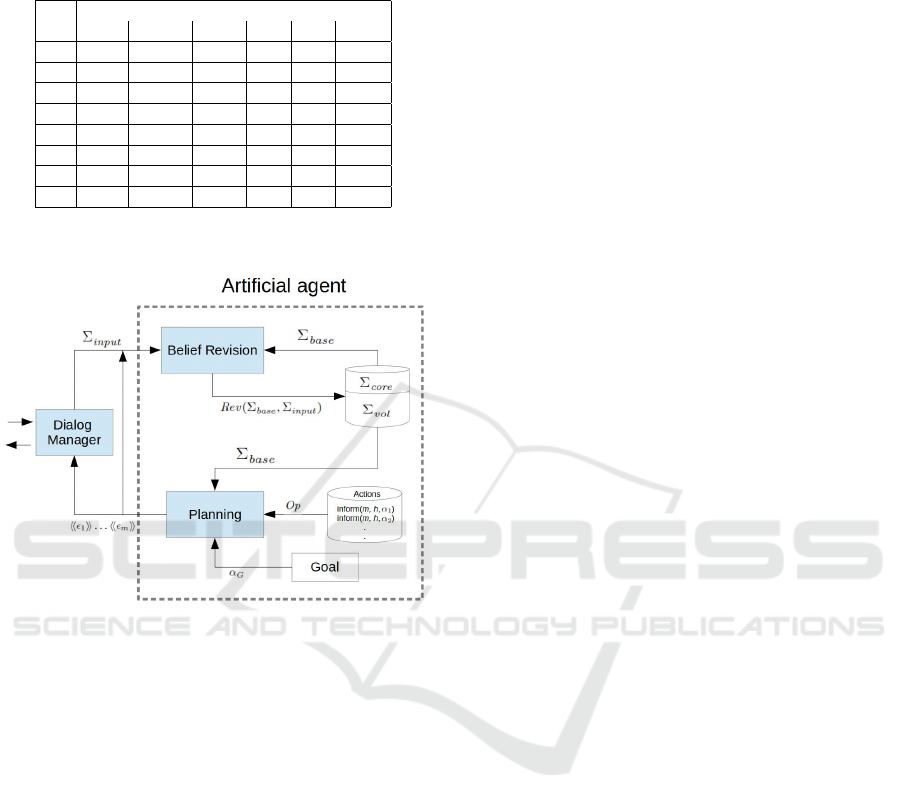
Table 1: Variable assignments. For every option o ∈ Opt
and variable x ∈ Var, we denote by v
o,x
the corresponding
entry in the table. For instance, we have v
sw,env
= water.
Opt
Var
env loc soc cost dan intens
sw water mixed single med low high
ru land outdoor single low med high
hr land outdoor single high high low
te land mixed mixed high med med
so land mixed team med med med
yo land mixed single med low low
di water mixed single high high low
sq land indoor mixed high med med
is to help agent h to make the right choice, given her
actual beliefs and desires.
Figure 3: System architecture.
In order to set the initial belief base, agent m has
to be provided with information about the possible op-
tions that the user can choose (Opt) and their proper-
ties (Var). For each pair (Opt,Var) we have a valu-
ation Val. In this example, we suppose that Opt in-
cludes the following eight elements: swimming (sw),
running (ru), horse riding (hr), tennis (te), soccer (so),
yoga (yo), diving (di) and squash (sq). Moreover,
there are exactly six variables in Var which are used
to classify the available options: environment (env),
location (loc), sociality (soc), cost (cost), dangerous-
ness (dan) and intensity (intens). The variable as-
signments are shown in Table 1.
Formulas representing the rules and constraints
are loaded as part of agent m’s belief base. For ex-
ample, the implementation of the formula represent-
ing the fact that agent h explicitly believes that a sport
cannot have two different values for a given property
is formalized as follows:
^
o∈Opt
x∈Var
v
1
,v
2
∈Val
x
:v
1
6=v
2
4
h
val(o, x 7→ v
1
) →
4
h
¬val(o, x 7→ v
2
)
The syntax for writing the formulas is based on
the TouIST language, with the extension of the modal
operators for explicit and implicit belief. For exam-
ple, we use {h} for representing 4
h
. Similarly we
use [m] for
m
.
bigand
$o,$x,$v1,$v2
in $Opt,$Var,$Val($x),$Val($x)
when $v1 != $v2:
{h}val($o,ass($x,$v1))=>
{h}not val($o,ass($x,$v2))
end
Thus, this syntax allows us to represent functions
like the one included in the next formula, which states
that an option o is ideal for agent h if and only if the
option satisfies all agent h’s desires:
^
o∈Opt
ideal(h, o) ↔
W
Γ∈2
Des∗
des(h, Γ)∧
V
γ∈Γ
f
comp
(o, γ)
The function f
comp
specifies, for every option o ∈
Opt and possible desire γ ∈ Des, the condition guar-
anteeing that o satisfies (or, complies with) γ:
f
comp
(o, a) = val(o, a),
f
comp
(o, ∼a) = ¬val(o, a),
f
comp
o, [d
1
, . . . , d
k
] d
= ¬ f
comp
(o, d
1
) ∨ . . . ∨
¬ f
comp
(o, d
k
) ∨ f
comp
(o, d).
The full implementation of the formula with the
function f
comp
included, requires the capture of the
human’s desires which together with the set of rules
and constraints are used to generate the machine’s be-
lief base.
$n1 =2
$n2 =1
$n3 =1
$Delta0 = [
"ass(env,land)",
"ass(intens,med)",
"not ass(loc,indoor)",
"ass(cost,high) => ass(soc,mixed)"
]
$Delta0_1(1) = ["ass(env,land)"]
$Delta0_1(2) = ["ass(intens,med)"]
$Delta0_2(1) = ["not ass(loc,indoor)"]
$Delta0_2(1,1) = ["ass(loc,indoor)"]
$Delta0_3(1) = ["ass(cost,high) =>
ass(soc,mixed)"]
$Delta0_3(1,1) = ["ass(cost,high)"]
$Delta0_3(1,2) = ["ass(soc,mixed)"]
$Opt = [sw, ru, te, hr, so, yo, di, sq]
$Var = [env, loc, soc, cost, danger, intens]
An Implemented System for Cognitive Planning
495

$Val(env) = [land,water]
$Val(loc) = [indoor, outdoor, mixed]
$Val(soc) = [single, team, mixed]
$Val(cost) = [low, med, high]
$Val(danger) = [low, med, high]
$Val(intens) = [low, med, high]
.
.
.
bigand
$o in $Opt :
ideal(h,$o) <=>
((bigand
$d0,$i,$e
in $Delta0, [1..$n1],
$Delta0_1($i)
when $d0 in $Delta0_1($i):
val($o,$e)
end) and
(bigand
$d0,$i,$e
in $Delta0, [1..$n2],
$Delta0_2($i,1)
when $d0 in $Delta0_2($i):
not val($o,$e)
end) and
(bigand
$d0, $i, $p, $c
in $Delta0, [1..$n3],
$Delta0_3($i,1),
$Delta0_3($i,2)
when $d0 in $Delta0_3($i):
not val($o,$p) or val($o,$c)
end))
end
The set of human desires is represented by
$Delta0 in the previous syntax. The counters
$n1, $n2, $n3 specify the number of positive desires,
negative desires and conditional desires respectively.
We conceive a positive desire as the human express-
ing a valuation for a variable assignment from Table
1 (e.g., environment is land). A negative desire is a
negative valuation for a variable assignment. Finally,
a conditional desire is a conditional valuation between
variable assignments (e.g., if the cost is high then so-
ciality level should be mixed).
Similarly, the goal to be achieved by the planning
agent is captured by the following formula:
α
G
def
=
_
o∈Opt
potIntend(h, o).
Moreover, we suppose that, for agent h to have
a potential intention to choose option o, denoted by
potIntend(h, o), she must have a justified belief that o
is an ideal option for her:
potIntend(h, o)
def
= 4
h
ideal(h, o) ∧ justif(h, o).
The latter is defined using the same syntax and in our
case is expressed by the next formula:
bigor
$o in $Opt :
{h}ideal(h,$o) and justif(h,$o)
end
The set of actions are generated from Table 1. For
instance, inform(m,h,val_so_ass_env_land) is an in-
formative action. It is interpreted as the speech act
used by agent m to inform agent h that the valuation
of the property:environment for the option:soccer is
land. In order to help agent h to select an activ-
ity, agent m also needs information about h’s desires.
This information is gathered by agent m during its
interaction with agent h. The interaction interface
between h and m is shown in Figure 4. The belief
revision module is called after each agent h’s feed-
back and it restores consistency of the agent m’s be-
lief base, in case the incoming information is incon-
sistent with agent m’s pre-existent beliefs. In the ex-
Figure 4: Collecting agent h’s preferences.
ample, agent h would like to practice a land activity,
with medium intensity, which is not exclusively in-
door, and which can be practiced both in single and
team mode, if its cost is high. The next rule for
precondition states that agent h must be informed by
agent m about the dangerousness level of a sport, be-
fore presenting other properties for an option. For
a 6∈ Assign
dan
:
P
inform
m,h,val(o, a)
=
m
val(o, a)∧
^
v∈Val
dan
val(o, dan 7→ v) → 4
h
val(o, dan 7→ v)
In the next lines we illustrate how the precondition
is assigned by the planning module together with its
+
m
α operator in order to specify the successful oc-
currence of an informative action:
[m]((val_te_ass_intens_med) and
(val_te_ass_danger_med =>
{h}val_te_ass_danger_med)) and
plus({h}val_te_ass_intens_med...
The planning module generates plans with the ele-
ments contained in the action file. It starts with plans
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
496

of length 1, and enters in a loop. At each interac-
tion the planning module asks the SAT solver to ver-
ify whether the plan allows to achieve the goal. If no
plan of length k is found, the program will increase
the counter in one and look for a plan of length k + 1.
An example of an abstract plan generated by the plan-
ning module is:
plus({h}(val_te_ass_danger_med)
plus({h}(val_te_ass_intens_med)
plus({h}(val_te_ass_soc_mixed)
plus({h}(val_te_ass_loc_mixed)
plus({h}(val_te_ass_env_land)
plus({h}(ideal_h_te)
The order of speech acts is determined by the pre-
conditions. Specifically, the planning module informs
firstly about the dangerousness level of the sport. Sec-
ondly, it provides explanation of why the user’s de-
sires are satisfied. Finally, it indicates the ideal sport
for the user, in this case tennis.
Figure 5: Plan shown by the chatbot to the human.
The chatbot writes both the sequence of speech acts
and its translation into natural language expressions.
We decided to display the abstract plan in the GUI, as
shown in Figure 5, for illustrative purposes oriented
to demonstrate how the GUI transforms it into natural
language using a simple function. The abstract plan
will not be displayed by the GUI in the end-user ver-
sion of the system.
5 EXPERIMENTS
In this section, we present the experiments conducted
in order to test the cognitive planning system in the
scenario described in the previous section. The ex-
periment was devoted to evaluate the performance of
the planning module in integration with the belief re-
vision module. The GUI was not used during the test,
therefore the procedure was carried out on command
line mode.
In order to perform the test we generate firstly a set
of desires of the human in different input files. These
input files are processed by the belief revision mod-
ule sequentially in order to generate the volatile side
of the belief base. Secondly, the translator module is
called to generate the initial state and the goal. Fi-
nally, the initial state, the set of actions (repertoire of
speech acts) and the goal are used to call the planning
module.
The set of options and variables described in Table
1 were used to test the performance of the system,
expanding the table in the number of sports available.
Similarly, we vary the number of the human’s desires.
Figure 6 shows the results of the computation. The
data plotted in the previous graph are shown in table
2.
3 4
5 6
0
1
2
3
4
plan size
seconds
Opt = 3
Opt = 4
Opt = 5
Opt = 6
Opt = 7
Opt = 8
Figure 6: Processing time (in seconds) based on the number
of options.
Table 2: Processing time (in seconds) to achieve a plan
based of the number of Options.
Number of Options (Opt)
Plan
size
3
4
5 6 7 8
3 0.059
0.067 0.063 0.066 0.068 0.070
4
0.438 0.482
0.494
0.506
0.539
0.567
5 1.355 1.433 1.505 1.608 1.668 1.731
6
3.274 3.217 3.353
3.696
3.747 4.045
The experiments were conducted using an Ubuntu
64 bits linux virtual machine running on a core i7
processor with 8 gigabytes RAM. The belief revision
and cognitive planning module were implemented in
Ocaml version 4.10.0 and the chatbot interface was
programmed in Java openjdk version 1.8.0 with swing
components. The data files containing the belief base,
actions, goal and plan were stored as plain text files.
6 DISCUSSION
The architecture presented in Figure 3 works as an
integrated system. All the processes, interfaces and
An Implemented System for Cognitive Planning
497

exchange of data between the modules are working
according to the definition of the use cases displayed
in Figure 2.
The system dialogue capability is limited for the
moment. The human agent communicates her desires
to the machine, and the latter computes the most suit-
able plan. There is no feedback from the human af-
ter the sequence of speech acts performed by the ma-
chine.
The effectiveness of the computation is polyno-
mial with respect to the set of actions. Although the
algorithm for choosing the correct plan uses a brute
force technique, the experiments demonstrate that in
order to verify the validity of a single candidate plan,
the planning module takes around 66 ms on average.
The reason for choosing a brute force approach was to
allow the algorithm to be the most general as possible.
However, it would be possible to include a heuristic to
improve the performance of the general process. For
example, the planning module could consider the size
of the input (based on the human’s set of desires) as
the initial size of the plan. Thus, the planner will gen-
erate plans of that size at least. This prevents the plan-
ner from spending time to generate candidate plans of
smaller size than the number of human’s desires. In
addition, an optimization can be included in the al-
gorithm if we add a mechanism for giving priorities
to certain types of actions. For example, the actions
which are stated as preconditions should be priori-
tized to be included between the first sets of combi-
nations to be tested by the planning module.
Despite the fact that the SAT encoding is efficient
for solving the planning problem, we still need to gen-
erate one formula per candidate plan, which is time-
consuming, especially for the translation process and
the interface with the external tool TouIST. We want
to explore the possibility of using a QBF (quantified
boolean formulas) encoding of the planning problem
which will allow us to generate one single formula for
evaluating all possible candidate plans. In this case,
the preconditions are assigned if and only if there ex-
ists a plan that satisfies the goal. This alternative ap-
proach will allow us compare the efficiency of QBF
solvers against the SAT-based method in solving our
planning problem.
7 CONCLUSION
Our implementation demonstrates that the NP-
complete epistemic logic presented in (Fernandez
et al., 2021) and the cognitive planning problem for-
mulated in this logic are suitable for real-world appli-
cations in the domain of human-machine interaction.
In future work, we plan to extend the implemented
system by speech acts of type question to capture both
sides of interaction, from agent m to agent h (han-
dled by the actual implementation) and from agent
h to agent m. We expect to apply the same frame-
work to a joint activity scenario of type cooperative
boardgame (Bard et al., 2019; Longin et al., 2020)
involving the human and the machine in which they
have to exchange information and collaborate in or-
der to achieve a common goal.
We also plan to combine our implementation of
cognitive planning with machine learning and data
mining techniques, as presented in (Krzywicki et al.,
2016), in order to extract information about the hu-
man user from real data. In addition, we intend to
include a setting parameter in the artificial agent in
order to let the system select the most convenient ap-
proach (SAT or QBF) depending on the scenario. We
think that the SAT approach could be better when the
set of actions is not so big, while the QBF approach
will turn out to be well-suited for handling a large
repertoire of speech acts.
Last but not least, we intend to compare our
framework for cognitive planning with approaches
to epistemic planning closely related to ours (Muise
et al., 2015; Kominis and Geffner, 2015; Le et al.,
2018). None of these approaches presents a modular
architecture or an integration of planning and belief
revision. On the contrary, we have built our system
in a modular way by designing the different compo-
nents, including planning and belief revision, with the
interfaces that are necessary for the system working in
an integrated way. This feature allows the scalability
of the system. In fact, we are expecting to replace the
GUI with a more advanced web interface and add a
security module for granting access to the system in
a multi-user environment without altering the rest of
the modules.
ACKNOWLEDGEMENTS
This work is supported by the ANR project CoPains
(“Cognitive Planning in Persuasive Multimodal Com-
munication”). Support from the ANR-3IA Artificial
and Natural Intelligence Toulouse Institute is also ac-
knowledged.
REFERENCES
Akimoto, T. (2019). Narrative structure in the mind: Trans-
lating genette’s narrative discourse theory into a cog-
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
498

nitive system. Cognitive Systems Research, 58:342–
350.
Bard, N., Foerster, J. N., Chandar, S., Burch, N., Lanctot,
M., Song, H. F., Parisotto, E., Dumoulin, V., Moitra,
S., Hughes, E., Dunning, I., Mourad, S., Larochelle,
H., Bellemare, M. G., and Bowling, M. (2019). The
hanabi challenge: A new frontier for AI research.
CoRR, abs/1902.00506.
Bolander, T. and Andersen, M. B. (2011). Epistemic plan-
ning for single- and multi-agent systems. Journal of
Applied Non-Classical Logics, 21(1):9–34.
Cooper, M. C., Herzig, A., Maffre, F., Maris, F., Perrotin,
E., and Régnier, P. (2021). A lightweight epistemic
logic and its application to planning. Artificial Intelli-
gence, 298:103437.
Fernandez, J., Gasquet, O., Herzig, A., Longin, D., Lorini,
E., Maris, F., and Régnier, P. (2020). TouIST: a
friendly language for propositional logic and more.
In Bessiere, C., editor, Proceedings of the Twenty-
Ninth International Joint Conference on Artificial In-
telligence, IJCAI-20, pages 5240–5242. International
Joint Conferences on Artificial Intelligence Organiza-
tion. Demos.
Fernandez, J., Longin, D., Lorini, E., and Maris, F. (2021).
A simple framework for cognitive planning. In Pro-
ceedings of the Thirty-Fifth AAAI Conference on Arti-
ficial Intelligence (AAAI-21). AAAI Press.
Kominis, F. and Geffner, H. (2015). Beliefs in multiagent
planning: from one agent to many. In Brafman, R. I.,
Domshlak, C., Haslum, P., and Zilberstein, S., editors,
Proceedings of the 25th International Conference on
Automated Planning and Scheduling (ICAPS 2015),
pages 147–155. AAAI Press.
Krzywicki, A., Wobcke, W., Bain, M., Calvo Martinez, J.,
and Compton, P. (2016). Data mining for building
knowledge bases: Techniques, architectures and ap-
plications. The Knowledge Engineering Review, -1:1–
27.
Le, T., Fabiano, F., Son, T. C., and Pontelli, E. (2018).
EFP and PG-EFP: epistemic forward search planners
in multi-agent domains. In Proceedings of the Twenty-
Eighth International Conference on Automated Plan-
ning and Scheduling, ICAPS 2018. AAAI Press.
Longin, D., Lorini, E., and Maris, F. (2020). Beliefs, time
and space: A language for the y
¯
okai board game. In
Uchiya, T., Bai, Q., and Marsá-Maestre, I., editors,
PRIMA 2020: Principles and Practice of Multi-Agent
Systems - 23rd International Conference, Nagoya,
Japan, November 18-20, 2020, Proceedings, volume
12568 of Lecture Notes in Computer Science, pages
386–393. Springer.
Lorini, E. (2018). In praise of belief bases: Doing epistemic
logic without possible worlds. In Proceedings of the
Thirty-Second AAAI Conference on Artificial Intelli-
gence (AAAI-18), pages 1915–1922. AAAI Press.
Lorini, E. (2020). Rethinking epistemic logic with belief
bases. Artificial Intelligence, 282.
Löwe, B., Pacuit, E., and Witzel, A. (2011). DEL planning
and some tractable cases. In Proceedings of the 3rd In-
ternational International Workshop on Logic, Ratio-
nality and Interaction (LORI 2011), pages 179–192.
Springer Berlin Heidelberg.
Muise, C., Belle, V., Felli, P., McIlraith, S. A., Miller, T.,
Pearce, A. R., and Sonenberg, L. (2015). Planning
over multi-agent epistemic states: A classical plan-
ning approach. In Proceedings of the 29th AAAI Con-
ference on Artificial Intelligence (AAAI 2015), pages
3327–3334. AAAI Press.
Prezenski, S., Brechmann, A., Wolff, S., and Russwinkel,
N. (2017). A cognitive modeling approach to strategy
formation in dynamic decision making. Frontiers in
Psychology, 8:1335.
An Implemented System for Cognitive Planning
499
