
Compact, Accurate and Low-cost Hand Tracking System based on LEAP
Motion Controllers and Raspberry Pi
Giuseppe Placidi
1 a
, Alessandro Di Matteo
1
, Filippo Mignosi
2 b
, Matteo Polsinelli
1 c
and Matteo Spezialetti
2 d
1
A
2
VI-Lab, c/o Dept. MeSVA, University of L’Aquila, Via Vetoio Coppito, 67100 L’Aquila, Italy
2
Dept. DISIM, University of L’Aquila, Via Vetoio Coppito, 67100 L’Aquila, Italy
Keywords:
Hand Tracking, Virtual Glove, Raspberry Pi, Occlusions, Remote Operating.
Abstract:
The large diffusion of low-cost computer vision (CV) hand tracking sensors used for hand gesture recognition,
has allowed the development of precise and low cost touchless tracking systems. The main problem with CV
solutions is how to cope with occlusions, very frequent when the hand has to grasp a tool, and self-occlusions
occurring when some joint obscures some other. In most cases occlusions are solved by using synchronized
multiple stereo sensors. Virtual Glove (VG) is one of the CV-based systems that uses two orthogonal LEAP
sensors integrated into a single system. The VG system is driven by a Personal Computer in which both a
master operating system (OS) and a virtual machine have to be installed in order to drive the two sensors
(just one sensor at a time can be driven by a single OS instance). This is a strong limitation because VG has
to run on a powerful PC, thus resulting in a not properly low-cost and portable solution. We propose a VG
architecture based on three Raspberry Pi (RP), each consisting of a cheap single board computer with Linux
OS. The proposed architecture assigns an RPi to each LEAP and a third RP to collect data from the other two.
The third RP merges, in real time, data into a single hand model and makes it available, through an API, to
be rendered in a web application or inside a Virtual Reality (VR) interface. The detailed design is proposed,
the architecture is implemented and experimental benchmark measurements, demonstrating the RPi-based
VG real-time behaviour while containing costs and power consumption, are presented and discussed. The
proposed architecture could open the way to develop modular hand tracking systems based on more than two
LEAPs, each associated to one RP, in order to further improve robustness.
1 INTRODUCTION
Computer vision (CV) (Voulodimos et al., 2018) is
actually applied with success for the development of
touchless hand tracking systems due to the low cost,
increasing precision, fastness and high versatility in
recognizing every hand size and silhouette (Oudah
et al., 2020). On the contrary, wearable gloves (WG)
use devices installed directly on the hand and fingers
(Battaglia et al., 2015; Luzhnica et al., 2016; Wang
et al., 2020) which make them haptic and precise.
However, WG expensive, need to be specifically de-
signed for a hand size and shape and could be very
limiting for the movements. CV-based approaches
a
https://orcid.org/0000-0002-4790-4029
b
https://orcid.org/0000-0001-9599-5730
c
https://orcid.org/0000-0002-4215-2630
d
https://orcid.org/0000-0001-5786-3999
(Placidi, 2007; Placidi et al., 2013; Erden and Cetin,
2014; Marin et al., 2016; Placidi et al., 2017; Placidi
et al., 2018; Kiselev et al., 2019; Shen et al., 2019;
Yang et al., 2020; Ameur et al., 2020; Placidi et al.,
2021) use the interpretation of video-collecting de-
vices, usually sensors operating also in the visible or
in the infrared (IR) range, placed at a certain distance
from the hand. The key advantage of CV-based sys-
tems is that no physical contact is required and the
movements are free, fluid and natural, being the hand
unforced to wear anything, and it could naturally grip
specialized tools to carry on specific procedures. For
these reasons, CV hand tracking systems are grow-
ing especially in human-system interaction, to im-
prove the communication between users and comput-
ers, virtual reality environments, devices and robots,
also from remote, to perform medical procedures and
for rehabilitation (Ankit et al., 2011; Avola et al.,
2013; Placidi et al., 2015; Imran and Raman, 2020;
652
Placidi, G., Di Matteo, A., Mignosi, F., Polsinelli, M. and Spezialetti, M.
Compact, Accurate and Low-cost Hand Tracking System based on LEAP Motion Controllers and Raspberry Pi.
DOI: 10.5220/0010880900003122
In Proceedings of the 11th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2022), pages 652-659
ISBN: 978-989-758-549-4; ISSN: 2184-4313
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Mahdikhanlou and Ebrahimnezhad, 2020; Chen et al.,
2015; Jin et al., 2016; Erden and Cetin, 2014; Liu and
Zhang, 2014; Carrieri et al., 2016; Zhang et al., 2019;
Petracca et al., 2015; Moro et al., 2016).
Among the CV based gloves, those implemented
with the LEAP (LEAP
1
) sensor are the most diffuse
(Placidi et al., 2017; Placidi et al., 2018; Kiselev et al.,
2019; Shen et al., 2019; Yang et al., 2020; Ameur
et al., 2020) due to the fact that LEAP is accurate,
low-cost, compact (Bachmann et al., 2014) and can
effectively be used for hand tracking.
LEAP sensor uses 3 IR light sources and two de-
tectors to obtain 3D visual information saved and re-
produced almost simultaneously (more than 60fps)
from the server. One of its advantages is that it is
appropriate for different hand sizes (adults and chil-
dren), as well as for different hand shapes (healthy
people and patients with residual infirmities).
However, all CV hand tracking systems, including
LEAP-based, have to face the problem of occlusions,
occurring when some hand joints are invisible to the
sensors, being occlusions either produced by external
objects grasped by the hand or by parts of the hand
itself (self-occlusions).
Due to occlusions, CV-based tracking systems can
fail to correctly reproduce position/trajectory of the
hand or parts of it because the position of the invisible
parts are guessed, thus resulting in inaccurate and un-
stable representations. This could be negligible when
just raw gestures need to be reproduced, but crucial
when finer movements are used in tele-operated ap-
plications, such as tele-surgery or operations in dan-
gerous environments (Choi et al., 2018; Mueller et al.,
2019; Smith et al., 2020).
The only way to reduce the impact of occlusions
is to use multiple sensors surrounding the scene, in a
multiple-view arrangement, all sensors synchronized
each-other and all contributing to recover the hand
model in real-time (occlusions are solved because
points which are invisible to one sensor can probably
be visible to another).
Recently, several works have been published with
the aim of improving hand tracking accuracy by
combining LEAP data with those of other devices
or data from multiple LEAPs (Marin et al., 2016;
Mahdikhanlou and Ebrahimnezhad, 2020; Yang et al.,
2020; Kiselev et al., 2019; Shen et al., 2019; Placidi
et al., 2017; Placidi et al., 2018; Placidi et al., 2021).
In particular, in (Marin et al., 2016) a LEAP is
supported by a Depth camera. The system has very
good accuracy (regarding gesture recognition) but low
frame rate (15fps) making it not suitable for applica-
tions that requires higher frequency (30fps or greater)
1
https://www.ultraleap.com/
to track natural hand movements. Moreover, due to
the occlusions between fingers (self-occlusions), the
method performs well only when the hand is in ideal
orientations/positions.
In (Mahdikhanlou and Ebrahimnezhad, 2020) a
LEAP is supported by an RGB webcam to improve
the quality of the recognition of symbols in the 3D
American sign language datasets. Aim of the pro-
posed system is to reduce the ambiguities in gesture
recognition: the RGB webcam is used as an auxiliary
system, being it unable to furnish specific spatial in-
formation. The same gesture recognition problem for
identification of American sign language and Handi-
craftGesture is solved accurately with just one LEAP
(Yang et al., 2020).
Kiselev et al. (Kiselev et al., 2019) use three
LEAPs for gesture recognition. The Authors show
that by increasing the number of sensors, the accu-
racy also increases due the fact that the number of
occlusions decreases. Moreover, the use of multiple
sensors of the same type greatly improves the perfor-
mance of the data integration strategy due to the eas-
iness in comparing similar models. However, since
just one LEAP at time can be driven by a single op-
erating system instance, the used client/server archi-
tecture described in the paper suggests that at least
three different computers have been used (expensive
and critical in terms of synchronization). In addition,
as two of the three LEAPs are coplanar, they mostly
contribute to increase the active region but have low
influence in reducing occlusions. Finally, the perfor-
mance of the system, in terms of frame rate, has not
been discussed.
Shen et al. (Shen et al., 2019), solve the problem
of occlusions in gesture recognition by proposing the
use of three LEAPs placed with their long axes on the
medium points of the sides of an equilateral triangle.
Though the paper deeply discusses on the system as-
sembly, calibration, data-fusion and results in terms
of position/orientation accuracy, no mention is dedi-
cated to the resulting efficiency of the system in terms
of fps.
Virtual Glove (VG) (Placidi et al., 2017; Placidi
et al., 2018; Placidi et al., 2021) is a system based
on the synchronized use of two orthogonal LEAPs
(Fig. 1) for reducing the probability of occlusions.
In particular, in (Placidi et al., 2017), VG was first
presented in a raw assembly; in (Placidi et al., 2018)
it was refined and calibrated and, finally, in (Placidi
et al., 2021) a new strategy for real time data integra-
tion from both sensors was presented and discussed.
Better results regarding occlusions reduction
could have been obtained with three LEAPs on a equi-
lateral configuration, as in (Shen et al., 2019), but
Compact, Accurate and Low-cost Hand Tracking System based on LEAP Motion Controllers and Raspberry Pi
653

with serious problems with the real-time maintenance
(at least 30fps) on a low-cost computer. Though, in
principle, the paradigm of VG (Placidi et al., 2017)
is applicable to any number of sensors placed in any
angular configuration, the choice of two orthogonal
sensors represents a good compromise between opti-
mization/positioning of the region of interest (ROI),
precision and efficiency. In fact, position/dimensions
of the ROI and precision with respect to the angle are
leaved to project-related considerations: what is crit-
ical in VG is the possibility of maintaining the real
time (at least 30 fps are necessary for hand motion
fluidity).
Since now, also in its final ensemble (Placidi et al.,
2021), VG was limited to the use of just two LEAP
sensors because of maintaining efficiency in driving
the LEAP sensors with a single powerful personal
computer.
Aim of the present paper is to design and test a
different hardware architecture to drive LEAP sensors
in VG in order to allow, in the future, the extension of
its concept to more than 2 sensors while maintaining
both cost and power consumption low.
The rest of the manuscript is structured as follows:
Section 2 reviews VG assembly. Section 3 details the
proposed architecture. Section 4 presents experimen-
tal benchmark data and discussion. Finally, Section 5
concludes the manuscript and delineates future devel-
opments.
2 ORIGINAL VG
CONFIGURATION
As discussed above, and referenced in (Placidi et al.,
2018), VG is composed by two orthogonal LEAP
sensors each lodged on a side of a square-angle alu-
minium support of side 25 cm (see Figure 1). The
centre of each LEAP was positioned at 18.5cm from
the internal part of the corner of the support: this
was established to optimize the signal in a cylindri-
cal region of interest (ROI) of radius 10cm and height
21cm while also reducing the effects of IR interfer-
ence between sensors. The two sensors were cali-
brated to allow data integration between them and to
construct a single hand model with data coming from
both sensors in real time (about 60 fps). Different fu-
sion strategies were presented: the original, simple,
used data from just one sensor at a time, those hav-
ing the most favourable view of the hand, in mutual
exclusion (Placidi et al., 2018); the second, smarter
than the first (but slower), used data from both sensors
in each frame and merged the joints from one sensor
with those from the other according to the calculation
of temporal behaviour (temporal smoothness) of each
joint (Placidi et al., 2021).
In either cases, data from the sensors had to be
collected by different machines. In fact, a limitation
of the LEAP sensor is that an instance of the Oper-
ating System (OS) can drive no more than one sen-
sor. The simultaneous management of multiple LEAP
sensors was solved by using a virtual machine. The
virtual machine (Slave) was installed on the physical
machine (Master): one sensor was assigned to Master
and the other to Slave, thus allowing to each machine
to instantiate its own, single, driver. Data provided by
both machines were rerouted towards a server (hosted
on the Master) that provided to send data of both de-
vices to the Master machine.
The server driven data from both LEAP sensors
and provided data fusion: data fusion strategy is also
implemented on the Master OS.
The previous stratagem allowed to drive 2 LEAP
sensors in a single machine: however, the host com-
puter was required to be powerful. Another choice
would be to use different PCs for different sensors,
but this would make VG architecture even more com-
plex, expensive and cumbersome than the one used,
at least until now.
Figure 1: Orthogonal LEAP sensors assembly in VG.
3 RPi-BASED VG
CONFIGURATION
Recent advances in the field of microprocessors has
allowed the development of cheap, compact and
powerful computers to be used in several applica-
tions. Raspberry Pi (RP) 4 model B (https://www.
raspberrypi.org/) is a single board computer equipped
with a 64 bits quad-core ARM8 Broadcom BCM2711
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
654
VG
SW
HW
1
Mongo
Database
Server
API
Application
2
3
RPi Box
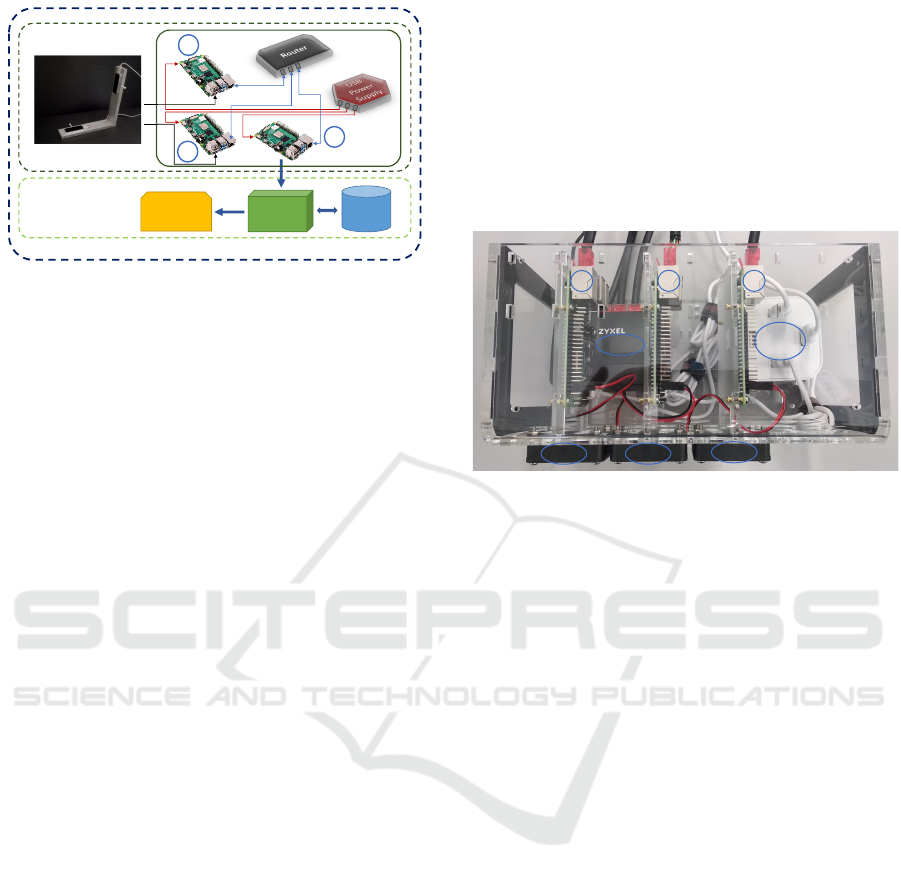
Figure 2: VG architecture based on RPi: each LEAP sen-
sor is associated to one RPi (1 and 2) and data from hand
models of both sensors are passed RP3. On each RPi an
instance of Linux OS runs. Besides OS, RP1 and RP2 just
collect data from the respective sensor; RP3 executes the
software to merge the two hand models into a single one (to
resolve the occlusions) and the graphic interface for the user
interaction.
1.5 Ghz processor, 4GB LPDDR4 Ram and an exten-
sible MicroSD. The operating system is derived from
Linux and it is called Raspberry Pi OS. The cost of
each RP is about 60 USD and the dimensions of the
board are 60mm x 90mm. There also exist more re-
cent and powerful versions but the previous one is that
we have integrated into our project. The new hard-
ware architecture of VG is based on three RPi (i=1:3),
as reported in Figure 2. Instead of using a single pow-
erful PC, we have used three RP: two assigned to drive
the LEAP sensors and the other, in cascade, to collect
data from the others, to perform data fusion in a single
hand model and to run the virtual reality environment.
The RPs are interconnected through a small router us-
ing Ethernet cables. Data from the RP1 and RP2 are
collected into the RP3 by using a web socket commu-
nication protocol.
Since the LEAP driver is available just for X86
processors, we have used the emulator Box86 to em-
ulate X86 instructions into an ARM processor. In fact,
it allows to execute Linux x86 applications on Linux
not X86, as the ARM case. In order to run Box86, the
OS has to be 32-bits. Further, Box86 uses native ver-
sions of some OS libraries, thus ensuring good perfor-
mance. Box86 integrates the dynamic re-compilation
(Dynarec) for the ARM platforms: in this way the ex-
ecution time is from 5 to 10 time faster than using an
interpreter. Box86 source code is released by GitHub
(https://github.com/ptitSeb/box86).
The other two processes necessary to be run on the
RPi are Leapd and Visualizer.
Leapd is a daemon process responsible for the cre-
ation of the numerical hand model to be made avail-
able for the other processes. A connection to Leapd is
possible either from a proprietary SDK or from a web-
socket client. In fact, the daemon hosts a websocket
server. Leapd allows the hand model formation and
its transfer outside the board (we use websocket to
transfer it to RP3).
Visualizer is an application, furnished by the
SDK, which allows to visualize the hand model gen-
erated from the LEAP sensor. The final ensemble of
the RPi-box is reported in Figure 3.
3
Router
Power
Supply
Fan 3
2 1
Fan 2
Fan 1
Figure 3: Upper side view of the RPi-box: it hosts the three
RPi (1, 2 and 3), a multiple USB power supply on the right
(to reduce the number of wires exiting from the box) and a
modem to switch data between RPi (left side, on the floor).
The cooling system is composed by three fans (black com-
ponents in the bottom). The transparent box is specifically
produced to host a maximum of 4 RPi.
Each RPi is equipped wit a 64 GB Sandisk SD
card, transfer rate of 120 MB/sec.
The installation procedure starts by compiling
Box86 on the RPi s(in the proprietary OS of RPi, the
installation requires the use of the apt package man-
ager, being the command ”cmake” absent). In order to
save the execution file of Box86 in the OS, the com-
mand ”make install” has to be executed followed by a
restart of the system.
Once Box86 is installed, it is possible to execute
the deamon of the LEAP sensor first by download-
ing the file ”LeapDeveloperkit” for Linux from the
proprietary site ( https://developer.leapmotion.com/
sdk-leap-motion-controller). The executable file has
to be in the path x86/usr/sbin: its execution is possible
by running the command ”sudo box86 leapd”.
A similar procedure needs to be executed to in-
stall the process Visualizer. However, it requires the
Qt library: for this reason, Qt has to be installed on
the OS before running the Visualizer. After that, the
command ”sudo box86 Visualizer” is sufficient to run
the Visualizer (as shown in Figure 5).
Finally, the client/server software developed in
(Placidi et al., 2018) with the fusion strategy pre-
sented in (Placidi et al., 2021) has been tested on the
new architecture. As discussed above, the web-based
Compact, Accurate and Low-cost Hand Tracking System based on LEAP Motion Controllers and Raspberry Pi
655
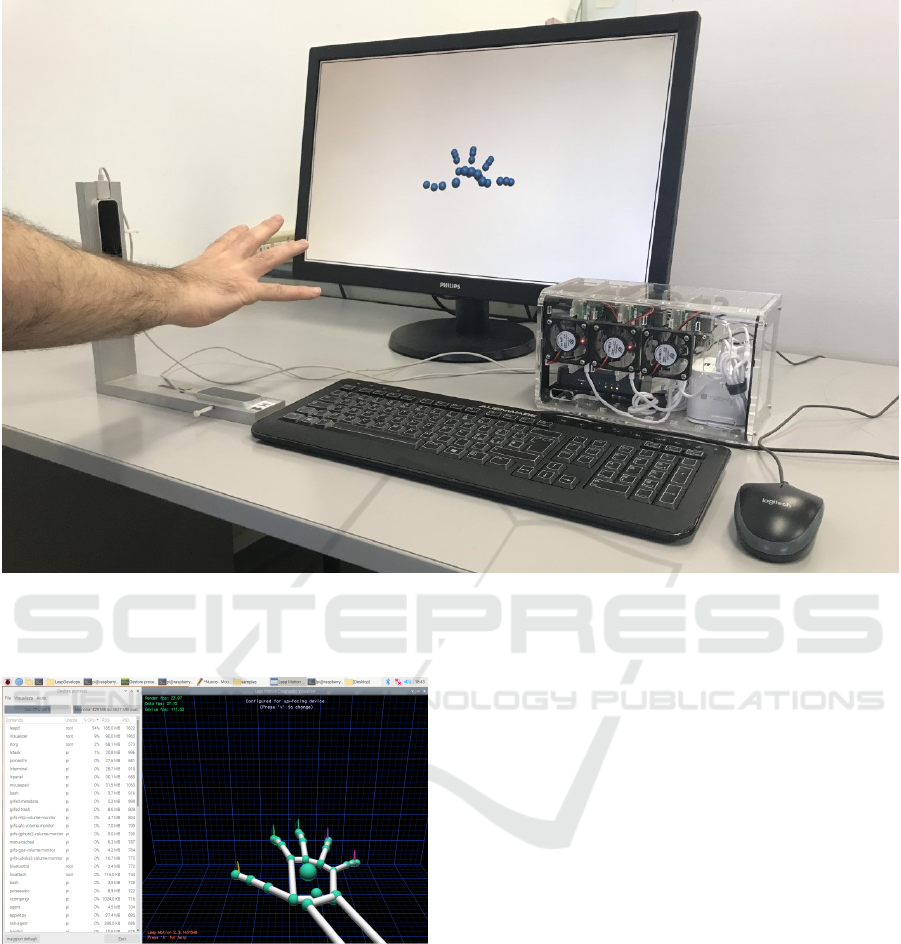
Figure 4: RPi-based VG in its final embodiment, composed by: RPi-box (lateral view, the cooling system is now visible),
sensor support, wide-screen, keyboard and mouse.
Figure 5: A screenshot collected from the RP1. The system
resources are shown alongside the Leap Visualizer which
renders a stick model of the hand. In order to represent the
hand movement, colored lines at the tips of the fingers were
added. This negatively affects the Frame Rate.
rendering software is only necessary on RP3. In fact,
the data models from RP1 and RP2 have just to be
passed to RP3 for model fusion and visualization in
the virtual environment.
4 RESULTS
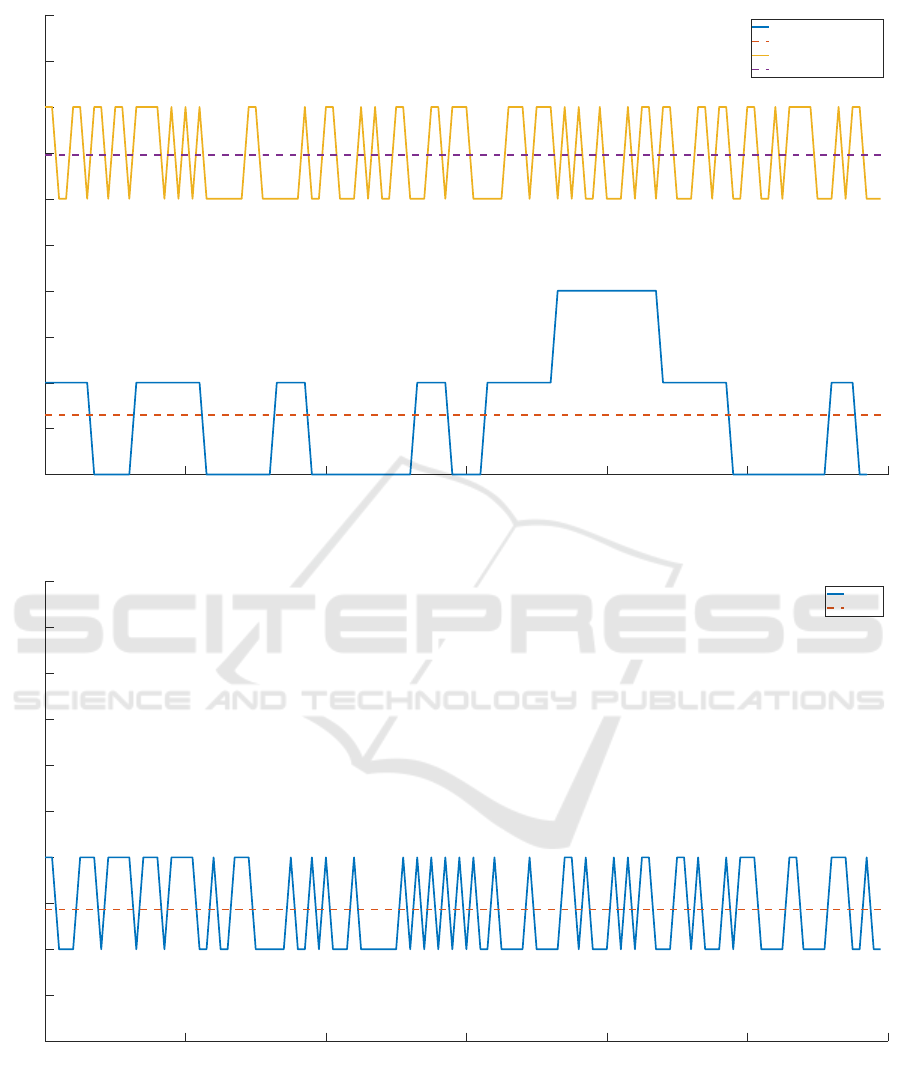
The first test was conducted on RP1 and RP2. The ex-
periment consisted on tracking a free moving hand for
a total of 10 minutes. Since RP1 and RP2 are twins
with respect to the hardware and software they use,
the results are very similar and, for this reason, re-
ported only for RP1, in Figure 6. Data in Figure 6
show that RP1 and RP2 are capable to run the whole
Leap Motion Controller software, including the Leap
Visualizer, at a frame rate which is about 33 fps. In
this configuration, the CPU is not completely used (in
the average, just 63% of the CPU is used). For our
purposes, a first for of optimization can be obtained
by excluding the Leap Visualizer from RP1 and RP2
(the model is visualized as a result of RP3). In this
case, the resulting frame rate of both RP1 and RP2
is increased to about 37 fps and the CPU usage is re-
duced to 57%, in the average. The reduced CPU usage
suggests that further optimization is possible to boost
the frame rate.
The final test was conducted on RP3 in the final
assembly for a free hand moving experiment of the
same type, and the same duration, of that used for RP1
and RP2. Figure 7 shows that RP3 is capable to ren-
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
656
0 100 200 300 400 500 600
Acquisition Time(s)
33
33.5
34
34.5
35
35.5
36
36.5
37
37.5
38
fps
fps and avg CPU for RP1 and RP2
AVG CPU 57%
AVG CPU 63%
fps with Visualizer
avg fps with Visualizer
fps with Client
avg fps with Client
Figure 6: RP1 performance, in terms of frame rate and average CPU usage. Both parameters were sampled every 5 seconds
for a total of 600 seconds.
0 100 200 300 400 500 600
Acquisition Time(s)
33
33.5
34
34.5
35
35.5
36
36.5
37
37.5
38
fps
fps and avg CPU for RP3
AVG CPU 60%
fps
avg fps
Figure 7: RP3 performance, in terms of frame rate and average CPU usage. Both parameters were sampled every 5 second
for a total of 600 seconds.
der about 34 fps in the web-based rendering software
with an average CPU usage of 60%. The final frame
rate is lower than that in RP1 and RP2 because the
merging operation among the models coming from
RP1 and RP2 is time consuming, though RP3 was free
from the driver of the LEAP device. Also in this case,
the CPU is not completely used and further optimiza-
tion is possible through, for example, the use of smart
Compact, Accurate and Low-cost Hand Tracking System based on LEAP Motion Controllers and Raspberry Pi
657

shape-based segmentation strategies (Franchi et al.,
2009). however, for our purposes, the goal of main-
taining a frame rate of at least 30 fps is completely
fit.
It is important to note that a fundamental role is
assumed by the used SD: in fact, when we tried to
change the SD with one of the same capacity but of
80 MB/s in transfer rate, the performance fell to about
17 fps. This fact authorized us to imagine that the
use an SD with a transfer rate greater than 120 MB/s
could contribute to improve the frame rate above 35
fps, though this has not been attempted and it is out
the scope of our project (our goal is to obtain a fi-
nal frame rate which is above 30fps in the final hand
model reproduced in a virtual environment).
However, we have verified that the hardest role in
our project is assumed by RP3: in fact, its assigned
tasks are data fusion, model reconstruction and re-
production in the graphic interface. The final frame
also using the graphic interface was 34 fps when using
the smart fusion strategy presented in (Placidi et al.,
2021). Though still acceptable, that number is very
close to the lower limit, though a further gain in fps
can be obtained by stressing the CPU usage.
The final assembly, showing RPi-Box, LEAP sup-
port, wide-screen, keyboard and mouse is reported in
Figure 4.
In this final version, keyboard and mouse were
used: a touch-screen could allow the elimination of
both these devices.
5 CONCLUSION
We have demonstrated that a VG can be implemented
by using cheap PCs instead of a costly, bulky and
power consuming PC. In fact, we have implemented
a low-cost and compact embodiment of the VG by
using three light RP 4 model B. The results is a VG
version with a frame rate of 34 fps which is accept-
able for most of VG purposes, though it could be too
low for high (temporal) resolution procedures (such
as medical interventions). Improvements could be ob-
tained along different directions:
1. by using last, most powerful, versions of RP;
2. by using faster SDs;
3. by optimizing the software in order to better use
the CPU power;
4. by using the 64 bit version of the emulator when
it will be available;
5. by using more than three RP.
The last case could improve performance by di-
viding the tasks of RP3 among two RPi in series: one
to collect data from RP1 and RP2 and to fuse the mod-
els and the other to render the final model in the VR
environment.
Thanks to the scalability of the system, a further
extension of the proposed architecture would be to
drive more than two LEAP sensors, maybe by imple-
menting the designs proposed in (Kiselev et al., 2019;
Shen et al., 2019), for further reducing occlusions. In
that case, however, the RP acting as a hub would re-
ceive and process information from several RPi and
an efficient and smart data fusion strategy would be
necessary to maintain real-time.
REFERENCES
Ameur, S., Ben Khalifa, A., and Bouhlel, M. S. (2020). A
novel hybrid bidirectional unidirectional lstm network
for dynamic hand gesture recognition with leap mo-
tion. Entertainment Computing, 35:1–10.
Ankit, C., Jagdish, R. L., Karen, D., and Sonia, R. (2011).
Intelligent approaches to interact with machines using
hand gesture recognition in natural way: A survey. In-
ternational Journal of Computer Science & Engineer-
ing Survey, pages 122–133.
Avola, D., Spezialetti, M., and Placidi, G. (2013). Design
of an efficient framework for fast prototyping of cus-
tomized humancomputer interfaces and virtual envi-
ronments for rehabilitation. Computer Methods and
Programs in Biomedicine, 110(3):490–502.
Bachmann, D., Weichert, F., and Rinkenauer, G. (2014).
Evaluation of the leap motion controller as a new
contact-free pointing device. Sensors, 15(1):214–233.
Battaglia, E., Bianchi, M., Altobelli, A., Grioli, G., Cata-
lano, M. G., Serio, A., Santello, M., and Bicchi, A.
(2015). Thimblesense: a fingertip-wearable tactile
sensor for grasp analysis. IEEE transactions on hap-
tics, 9(1):121–133.
Carrieri, M., Petracca, A., Lancia, S., Moro, S. B., Brigadoi,
S., Spezialetti, M., Ferrari, M., Placidi, G., and
Quaresima, V. (2016). Prefrontal cortex activation
upon a demanding virtual hand-controlled task: A
new frontier for neuroergonomics. Frontiers in Hu-
man Neuroscience, 10(53):1–13.
Chen, S., Ma, H., Yang, C., and Fu, M. (2015). Hand ges-
ture based robot control system using leap motion. In
International Conference on Intelligent Robotics and
Applications, pages 581–591. Springer.
Choi, P. J., Oskouian, R. J., and Tubbs, R. S. (2018).
Telesurgery: Past, present, and future. Cureus.
Erden, F. and Cetin, A. E. (2014). Hand gesture based
remote control system using infrared sensors and a
camera. IEEE Transactions on Consumer Electron-
ics, 60(4):675–680.
Franchi, D., Gallo, P., Marsili, L., and Placidi, G. (2009). A
shape-based segmentation algorithm for x-ray digital
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
658

subtraction angiography images. Computer Methods
and Programs in Biomedicine, 94(3):267–278.
Imran, J. and Raman, B. (2020). Deep motion templates and
extreme learning machine for sign language recogni-
tion. The Visual Computer, 36(6):1233–1246.
Jin, H., Chen, Q., Chen, Z., Hu, Y., and Zhang, J.
(2016). Multi-leapmotion sensor based demonstration
for robotic refine tabletop object manipulation task.
CAAI Transactions on Intelligence Technology, 1.
Kiselev, V., Khlamov, M., and Chuvilin, K. (2019). Hand
gesture recognition with multiple leap motion devices.
In 2019 24th Conference of Open Innovations Associ-
ation (FRUCT), pages 163–169. IEEE.
Liu, Y. and Zhang, Y. (2014). Toward welding robot with
human knowledge: A remotely-controlled approach.
IEEE Transactions on Automation Science and Engi-
neering, 12(2):769–774.
Luzhnica, G., Simon, J., Lex, E., and Pammer, V. (2016).
A sliding window approach to natural hand gesture
recognition using a custom data glove. In 2016 IEEE
Symposium on 3D User Interfaces (3DUI), pages 81–
90. IEEE.
Mahdikhanlou, K. and Ebrahimnezhad, H. (2020). Mul-
timodal 3d american sign language recognition for
static alphabet and numbers using hand joints and
shape coding. Multimedia Tools and Applications,
79(31):22235–22259.
Marin, G., Dominio, F., and Zanuttigh, P. (2016). Hand
gesture recognition with jointly calibrated leap motion
and depth sensor. Multimedia Tools and Applications,
75(22):14991–15015.
Moro, S. B., Carrieri, M., Avola, D., Brigadoi, S., Lan-
cia, S., Petracca, A., Spezialetti, M., Ferrari, M.,
Placidi, G., and Quaresima, V. (2016). A novel
semi-immersive virtual reality visuo-motor task ac-
tivates ventrolateral prefrontal cortex: a functional
near-infrared spectroscopy study. Journal of Neural
Engineering, 13(3):1–14.
Mueller, F., Deuerlein, C., and Koch, M. (2019). Intuitive
welding robot programming via motion capture and
augmented reality. IFAC-PapersOnLine, 52(10):294–
299.
Oudah, M., Al-Naji, A., and Chahl, J. (2020). Hand gesture
recognition based on computer vision: A review of
techniques. Journal of Imaging, 6(8):73.
Petracca, A., Carrieri, M., Avola, D., Basso Moro, S.,
Brigadoi, S., Lancia, S., Spezialetti, M., Ferrari, M.,
Quaresima, V., and Placidi, G. (2015). A virtual
ball task driven by forearm movements for neuro-
rehabilitation. In 2015 International Conference on
Virtual Rehabilitation (ICVR), pages 162–163.
Placidi, G. (2007). A smart virtual glove for the hand tel-
erehabilitation. Computers in Biology and Medicine,
37(8):1100 – 1107.
Placidi, G., Avola, D., Cinque, L., Polsinelli, M., Theodor-
idou, E., and Tavares, J. M. R. S. (2021). Data inte-
gration by two-sensors in a LEAP-based virtual glove
for human-system interaction. Multimedia Tools and
Applications, 80(12):18263–18277.
Placidi, G., Avola, D., Iacoviello, D., and Cinque, L.
(2013). Overall design and implementation of the
virtual glove. Computers in Biology and Medicine,
43(11):1927–1940.
Placidi, G., Cinque, L., Petracca, A., Polsinelli, M., and
Spezialetti, M. (2017). A virtual glove system for
the hand rehabilitation based on two orthogonal leap
motion controllers. In Proceedings of the 6th Inter-
national Conference on Pattern Recognition Applica-
tions and Methods - Volume 1: ICPRAM,, pages 184–
192. INSTICC, SciTePress.
Placidi, G., Cinque, L., Polsinelli, M., and Spezialetti, M.
(2018). Measurements by a leap-based virtual glove
for the hand rehabilitation. Sensors, 18(3):1–13.
Placidi, G., Petracca, A., Spezialetti, M., and Iacoviello, D.
(2015). A modular framework for EEG web based
binary brain computer interfaces to recover communi-
cation abilities in impaired people. Journal of Medical
Systems, 40(1).
Shen, H., Yang, X., Hu, H., Mou, Q., and Lou, Y. (2019).
Hand trajectory extraction of human assembly based
on multi-leap motions. In 2019 IEEE/ASME Inter-
national Conference on Advanced Intelligent Mecha-
tronics (AIM), pages 193–198.
Smith, R., Cucco, E., and Fairbairn, C. (2020). Robotic
development for the nuclear environment: Challenges
and strategy. Robotics, 9(4):94.
Voulodimos, A., Doulamis, N., Doulamis, A., and Protopa-
padakis, E. (2018). Deep learning for computer vi-
sion: A brief review. Computational Intelligence and
Neuroscience, 2018:1–13.
Wang, Z., Wang, D., Zhang, Y., Liu, J., Wen, L., Xu, W.,
and Zhang, Y. (2020). A three-fingered force feed-
back glove using fiber-reinforced soft bending actu-
ators. IEEE Transactions on Industrial Electronics,
67(9):7681–7690.
Yang, L., Chen, J., and Zhu, W. (2020). Dynamic hand
gesture recognition based on a leap motion controller
and two-layer bidirectional recurrent neural network.
Sensors, 20:2106–2123.
Zhang, W., Cheng, H., Zhao, L., Hao, L., Tao, M., and
Xiang, C. (2019). A gesture-based teleoperation sys-
tem for compliant robot motion. Applied Sciences,
9(24):1–18.
Compact, Accurate and Low-cost Hand Tracking System based on LEAP Motion Controllers and Raspberry Pi
659
