
A Formal Framework for Designing Boundedly Rational Agents
Andreas Br
¨
annstr
¨
om
1 a
, Timotheus Kampik
1 b
, Ramon Ruiz-Dolz
2 c
and Joaquin Taverner
2 d
1
Ume
˚
a University, Ume
˚
a, Sweden
2
Valencian Research Institute for Artificial Intelligence (VRAIN), Universitat Polit
`
ecnica de Val
`
encia, Valencia, Spain
Keywords:
Rational Agents, Socially Intelligent Systems, Engineering Multi-agent Systems.
Abstract:
Notions of rationality and bounded rationality play important roles in research on the design and implementa-
tion of autonomous agents and multi-agent systems, for example in the context of instilling socially intelligent
behavior into computing systems. However, the (formal) connection between artificial intelligence research on
the design and implementation of boundedly rational and socially intelligent agents on the one hand and for-
mal economic rationality – i.e., choice with clear and consistent preferences – or instrumental rationality – i.e.,
the maximization of a performance measure given an agent’s knowledge – on the other hand is weak. In this
paper we address this shortcoming by introducing a formal framework for designing boundedly rational agents
that systematically relax instrumental rationality, and we propose a system architecture for implementing such
agents.
1 INTRODUCTION
In the Artificial Intelligence (AI) research community,
a key line of research is concerned with the design
and implementation of rational agents, i.e., agents
that work towards goals they intend to achieve under
consideration of the beliefs they hold about their en-
vironment (Wooldridge, 1997). To advance engineer-
ing perspectives on this line of research (and to fa-
cilitate application potential), a broad variety of tools
and frameworks have been introduced over the past
two decades (Kravari and Bassiliades, 2015); a no-
table example that enjoys popularity is Jason (Bor-
dini et al., 2007) (as well as the JaCaMo frame-
work (Boissier et al., 2013) that make use of Jason),
an interpreter of a dialect of the AgentSpeak program-
ming language (Rao, 1996), which combines logic
and agent-oriented programming paradigms. Gener-
ally, the state of the art of research and development
of tools and frameworks for implementing rational
agents is well-surveyed (Cardoso and Ferrando, 2021;
Kravari and Bassiliades, 2015), and the community
frequently reflects on shortcomings and ways to ad-
dress them (Mascardi et al., 2019; Logan, 2018).
While the notion of rationality that the AI research
community has is notably broader than the precise
formal properties of rationality that are a cornerstone
a
https://orcid.org/0000-0001-9379-4281
b
https://orcid.org/0000-0002-6458-2252
c
https://orcid.org/0000-0002-3059-8520
d
https://orcid.org/0000-0002-5163-5335
of economic theory (Osborne and Rubinstein, 2020),
a central element is goal-orientation, i.e., the abil-
ity of an agent to maximize goal attainment, while
potentially compromising between several conflicting
goals. Analogously to how formal models of bounded
rationality like Tversky’s and Kahneman’s prospect
theory (Kahneman and Tversky, 1979) systematically
relax the properties (in particular the maximization of
expected utility), some models, tools, and frameworks
for designing and implementing intelligent agents try
to relax the rationality constraints of these agents.
However, these approaches are typically not grounded
in a formal model of rationality or in a systematic
relaxation thereof: a generic, abstract formal frame-
work for boundedly rational agents that can serve as
a point of departure does not exist. This paper works
towards addressing this issue by answering the fol-
lowing questions:
1. What notions of rationality and bounded rational-
ity exist in the literature, and how are these no-
tions reflected by practical approaches to engi-
neering boundedly rational agents and multi-agent
systems?
2. How can we create a more precise formal frame-
work of a boundedly rational agent as a point of
departure for engineering efforts?
3. Based on this formal framework, how can
we devise a holistic, engineering-centered, yet
technology-agnostic meta-model for the design
and implementation of boundedly rational agents?
Brännström, A., Kampik, T., Ruiz-Dolz, R. and Taverner, J.
A Formal Framework for Designing Boundedly Rational Agents.
DOI: 10.5220/0010895500003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 3, pages 705-714
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
705

The rest of this paper is organized as follows. Sec-
tion 2 provides an overview of different notions of
rationality and bounded rationality to then proceed
with a survey of approaches and frameworks for de-
signing and implementing boundedly rational agents.
Section 3 addresses some shortcomings of existing re-
search by introducing a formal framework of bound-
edly rational agents and by proposing a meta-model
(technology-agnostic architecture) therefor. Section 4
then discusses how the formal framework and archi-
tectural meta-model can be integrated with existing
approaches to designing and implementing somewhat
boundedly rational agents, before Section 5 concludes
the paper.
2 DESIGNING AND
IMPLEMENTING BOUNDEDLY
RATIONAL AGENTS
In this section, we first provide a formal definition of
the notions of rationality and bounded rationality to
then give an overview of existing approaches to de-
signing and implementing boundedly rational agents.
2.1 Rational Agents
The notion of a rational actor or agent comes from
economic rationality and has a well-defined formal
meaning (see, e.g. (Osborne and Rubinstein, 2020)).
Given a set of choice options A, a rational agent’s
choice selects an element a
∗
∈ A, which then estab-
lishes a partial order
1
on A, such that ∀a ∈ A,
a
∗
a, i.e., a
∗
is preferred over all (other) possible
choices from A. When the set of choices A is ex-
panded to A
0
(i.e., new elements are added, A ⊂ A
0
or
technically A ⊆ A
0
), the new choice of a
0
∗
∈ A
0
must
establish preferences that are consistent with respect
to the preferences established by the previous choice,
which can be concisely summarized as if a
0
∗
∈ A then
a
0
∗
= a
∗
, ceteris paribus (assuming all else remains
the same, i.e., the agent’s knowledge of the world did
not evolve).
However, in the AI community, economic ratio-
nality is less prominent than the notion of rational-
ity as agent behavior that strives to maximize a per-
formance measure, which is often not formally de-
fined, but which boils down to the maximization of
expected utility, given the knowledge at hand (and
1
Recall that a partial order on a set S is reflexive, anti-
symmetric, and transitive, i.e., ∀a, b, c ∈ S, the following
statements hold true: i) a a; ii) if a b and b a then
a = b; iii) if a b and b c then a c.
hence can be traced back to Von Neumann’s and Mor-
genstern’s utility theory). To separate these two no-
tions of rationality, Gintis distinguishes between for-
mal (economic) rationality and instrumental rational-
ity (Gintis, 2018). Beyond these two notions, some
symbolic AI researchers formally define rationality in
the form of rationality postulates, e.g. for belief re-
vision (Alchourr
´
on et al., 1985) and formal argumen-
tation (Caminada, 2017). In these cases, entirely new
notions of rationality have been introduced that rely
on the authors’ intuitions and are unrelated to eco-
nomic and instrumental rationality. To conclude, the
notion of rationality is ambiguous in symbolic artifi-
cial intelligence research, which may render the sys-
tematic treatment of bounded rationalitiy a challenge
as well.
2.2 Boundedly Rational Agents
From an engineering perspective, a boundedly ratio-
nal agent is an agent whose “rationality degree” (col-
loquially speaking) has been deliberately and system-
atically relaxed. Depending on the requirements of
the application domain, an agent implementation can
benefit from the relaxation of pure economic or in-
strumental rationality. For example, when interacting
with humans, the integration of the emotional aspect
of human nature into an agent’s behavior can improve
human perception of AI. This “humanization” of in-
telligent agents’ reasoning is reflected in the three ma-
jor components of a boundedly rational agent: (i) the
affective/emotional modeling (e.g., social cognition
(Seyfarth and Cheney, 2015)), (ii) the explainability
of an agent’s decisions, and (iii) the Human-Aware
Planning (Chakraborti, 2018). All these three com-
ponents are covered under the umbrella of Compu-
tational Argumentation, the research area that stud-
ies the integration of human (argumentative) reason-
ing into an intelligent system (e.g., agent), making
it an interesting and powerful approach to undertake
the implementation of a complete boundedly ratio-
nal agent. Thus, prior to creating our formal frame-
work and architectural meta-model for implementing
boundedly rational agents, we review the most promi-
nent existing works on affective/emotional agents, ex-
plainable agents, human-aware planning techniques,
and computational argumentation approaches.
As discussed above, in the agent-oriented com-
puting paradigm, traditional proposals have gen-
erally focused on economic theory or Aristotelian
practical reasoning to define the behavior of
agents (Wooldridge, 1997). However, these ap-
proaches have certain disadvantages when it comes
to modeling human social or affective behavior as
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
706

well as when modeling human social organizations.
This is because human beings are not always follow-
ing a logical reasoning process, aimed at maximizing
or minimizing their benefits, but rather follow a rea-
soning process that is biased in part by emotions, so-
cial context, or other individual characteristics such
as personality, gender, or age (Segerstrom and Smith,
2019). In humans, these factors are closely related
to other cognitive processes commonly used in the
field of artificial intelligence such as reasoning, plan-
ning or decision making processes (Davis et al., 2007;
Grecucci et al., 2020). Considering this, a natural ap-
proach to the concept of bounded rational agents can
be found in the field of affective computing (Picard,
1997). Affective computing studies the modeling of
affective and social factors to improve models for rep-
resenting, processing, understanding, and simulating
human affective behavior. Most of the models pro-
posed in this field try to simulate the influence of cog-
nitive processes related to the agent’s affective abil-
ities on deliberation processes (Gebhard, 2005; Tav-
erner et al., 2021; Paiva et al., 2017). Thus, emotions
and affective characteristics are used to relax the level
of rationality of the agents to reach a more human-
like level of affective behavior simulation. For exam-
ple, in (Dias et al., 2014), the FAtiMA architecture is
presented. This architecture is based on the Belief-
Desire-Intention (BDI) model and uses different af-
fective factors, such as emotions or personality, to in-
fluence the cognitive reasoning process of the agent.
To select the emotion according to the agent’s situa-
tional context, a model based on appraisal theories is
used (Ojha and Williams, 2017). Once the emotion is
determined, the agent’s decision making processes is
altered, influencing agent’s rational processes. Simi-
larly, ALMA, A Layered Model of Affect, is described
in (Gebhard, 2005). The authors estimate the agent’s
mood when an event occurs and then use it to deter-
mine the action the agent should execute. Another
interesting approach is the one described in (Alfonso
et al., 2017), in which the GenIA
3
architecture is pre-
sented. GenIA
3
is a general-purpose architecture that
extends the AgentSpeak language for the develop-
ment of affective agents. That architecture combines
both affective (based on different appraisal, cognitive,
and affective theories) and rational deliberation pro-
cesses (based on the BDI architecture). The affective
responses elicited when appraising events influence
the agent’s inference and decision making processes
(considering factors such as mood, emotions, expec-
tations, or personality) to a greater or lesser extent de-
pending on a parameter that determines the level of
rationality of the agent. GenIA
3
is currently being im-
plemented as an extension of Jason and is developed
using a modular design that allows for the adaptation
to other emotion theories.
Recently, research on explainable agents and
multi-agent systems has emerged as a high-profile
topic within the community during the last years (An-
jomshoae et al., 2019)
2
. To facilitate human-agent
explainability, one key idea is to design artificial
agents whose deliberation processes resemble – to
some limited extent – human reasoning and decision-
making (Broekens et al., 2010). More broadly speak-
ing, explainable artificial intelligence is expected to
rely on social science insights as a necessary re-
quirement for long-term break-troughs (Miller, 2019).
This assumption is reflected in a range of works that
i) study agent explainability from a behavioral psy-
chology/behavioral economics perspective (Kampik
et al., 2019a; Tulli et al., 2019) and ii) apply cogni-
tive architectures, such as architectures based on the
Belief-Desire-Intention deliberation approach, that
have their roots in cognitive science, psychology,
or philosophy to empirically study explainability in
human-agent/human-MAS interaction (Mualla et al.,
2021; Broekens et al., 2010).
On the formal side, machine reasoning explain-
ability is commonly considered a formal property (or
set thereof) that allows to provide a set of explana-
tions (e.g., beliefs in an agent’s belief base) of why
a certain decision has been made or a certain infer-
ence has been drawn (
ˇ
Cyras et al., 2020). However,
symbolic reasoners and planners are typically consid-
ered rational. For instance, in the context of formal
argumentation (see the previous subsection, as well
as (
ˇ
Cyras et al., 2021)), the argumentation approaches
that are to be explained are typically considered ra-
tional; no explanations as to why an agent is merely
boundedly rational – i.e., why rationality is violated –
need to be provided. Still, to facilitate explainability,
or more precisely: human interpretability, a symbolic
reasoner or planner will adjust its behavior so that it is
easier to explain to a human user, or better aligns with
human intuition without an explanation being neces-
sary, an empirical characteristic that is often referred
to as explicability (Zhang et al., 2017). Therefore, the
overlap of explainable and boundedly rational agents
is the need for human-like decision-making to facili-
tate explainability and explicability in the context of
human-aware planning.
Human-aware planning is an algorithmic ap-
proach for an autonomous system to plan its actions
to cohabit in an environment that is populated and/or
affected by humans (Chakraborti, 2018). This re-
quires a system to estimate what future actions hu-
2
Note that we consider the domain of explainable ma-
chine learning as out of the scope of this work.
A Formal Framework for Designing Boundedly Rational Agents
707

mans might take in that environment (Cirillo et al.,
2010). In order to achieve shared and personal goals,
a system needs ways to recognize the human’s plan
(sequence of actions) and goal, and align its own plan
(another sequence of actions) with the human’s plan.
This can mean to not go for the optimal plan in terms
of traditional efficiency measures (e.g., time, shortest
route, etc.), but a sub-optimal plan that aligns with
human behavior and reasoning.
The human-aware planning problem has, in gen-
eral, been explored in scenarios where a robot is sit-
uated in an environment involving humans, where
the robot perceives the human through sensors and,
through a model of human behavior, it adjusts its de-
liberative (planning) process. This produces a merged
plan where the robot adapts its plan to comply with
the constraints of the human plan (Chakraborti et al.,
2018; Cirillo et al., 2010). For example, the work
proposed in (K
¨
ockemann et al., 2014), addresses the
challenge of automatically generating plans that have
to accommodate scheduled activities, features and
preferences of humans. The planning algorithm uses
causal reasoning to create a plan using heuristic for-
ward planning together with a causal graph (Helmert
and Geffner, 2008). Another work (Floyd et al., 2018)
explores goal reasoning agents that are able to dynam-
ically reason about their goals, and modify them in re-
sponse to unexpected events or opportunities. The ap-
proach allows for agents that are members of human-
agent teams to use the partially specified preferences
of the human to estimate the utility of goals and guide
goal selection. The work utilizes the SapaReplan
framework (Talamadupula et al., 2010).
In contrast to typical applications of human-aware
planning where a robot is situated in an environ-
ment populated by humans, the research conducted
in (Br
¨
annstr
¨
om et al., 2020), explores how a software
agent can influence a human’s behavior by adapting
aspects of the human’s environment, introducing HA-
TPB, a human-aware planning architecture based on
the theory of planned behavior (TPB) (Ajzen et al.,
1991). According to TPB, a mental model can be
derived from three sources of human beliefs (atti-
tude, subjective norm, and perceived behavior con-
trol) which are linked to motivation, intention and
goals. The HA-TPB architecture captures the casual
relation between a human’s beliefs and behavior by a
transition system modeled in action reasoning (Gel-
fond and Lifschitz, 1998) to deliberate about the hu-
man’s behavior. An example use-case of the HA-TPB
architecture is a Virtual Reality (VR) game, in which
an agent is used for providing assistance in a social
scenario to children with autism by adapting the vir-
tual environment. The software agent evaluates the
human’s plan and adapts its actions by considering
human reasoning. In the case of autism, this requires
the system to understand the child’s limitations and
what assistance the child may need, in order to per-
form a wanted behavior successfully. This can be seen
as a type of relaxation of the agent’s rationality, since
the agent does not follow a classical reasoning pat-
tern aimed at achieving a goal, but rather the agent
modifies its behavior to adapt it to the behavior of its
human interlocutor.
Finally, the idea of bounded rationality has also
been studied and analyzed from different perspectives
within computational argumentation theory. Compu-
tational argumentation is one of the main branches
of AI that explores the integration of rationality
into computer systems through the use of arguments
and argumentation semantics (Dung, 1995; Atkinson
et al., 2017; Ruiz-Dolz, 2020). However, as we have
discussed above, human behavior does not always fol-
low a rational argumentative pattern, but in most cases
is guided by other affective or social factors.
Still, from a technical perspective, most (abstract)
argumentation semantics (Baroni et al., 2011) do not
satisfy the consistent preferences principle of eco-
nomic rationality, and the systematic treatment of
economic rationality and bounded rationality in the
context of computational argumentation is an emerg-
ing research frontier (Kampik and Gabbay, 2021). In
this context, the relation between systematically re-
laxing (economic) rationality and the systematic re-
laxation of monotony of entailment can be considered
of particular interest.
Several approaches explore how bounded ratio-
nality can be integrated within the frame of formal
computational argumentation research. The main ob-
jective of such approaches is the relaxation of the no-
tion of acceptance for an argument (i.e., when an ar-
gument can be considered valid or not from an ar-
gumentative viewpoint). The main differences be-
tween the observed approaches can be found in the
reasoning aspect that it is relaxed in the definition of
acceptance. For example, in Defeasible Logic Pro-
gramming (DeLP) argumentation (Garc
´
ıa and Simari,
2004; Pollock, 1987), the authors propose an alterna-
tive paradigm for computational argumentation where
arguments may be brought into consideration even if
their deductive validity is not provided (but need to
be rationally compelling). Thus, DeLP-based argu-
mentative approaches relax the internal reasoning as-
pect of argument structures so that they can be used
in less informed environments. A different theoret-
ical approach for bounded rationality in computa-
tional argumentation was introduced with the defini-
tion of (epistemic) probabilistic argumentation frame-
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
708

works (Thimm, 2012). Combining argumentation
frameworks and probabilistic reasoning, these proba-
bilistic frameworks include uncertain information re-
lated to the credibility of arguments in their formal-
ization. In an argumentative dialogue, it is hard to
model whether an argument can be believed or not.
Hence, these frameworks define the acceptance of an
argument based on their expected believability (i.e., a
probability distribution) rather than relying uniquely
on purely rational aspects. Finally, an important view-
point on bounded rationality for the theory of compu-
tational argumentation is the consideration of human
mental properties, such as emotions. Emotions are
a characteristic feature of humans, where emotional
and rational behaviors coexist. Human rationality is
usually influenced by the activation of emotions, so
it can be an important dimension to be brought into
consideration when defining computational models of
bounded rationality. Emotional argumentation frame-
works (Dalib
´
on et al., 2012) integrate the emotional
aspect into the abstract argumentation (Dung, 1995)
theory. Furthermore, within this approach, emotions
are taken into account during the formal evaluation
of argumentation. Thus, an emotional state can in-
fluence the acceptability of an argument under this
paradigm. In brief, bounded rationality in computa-
tional argumentation has been theoretically explored
from the point of view of the relaxation of the accept-
ability notion (e.g., regarding the internal structure of
arguments, credibility/believability, or emotional as-
pects of humans).
Different implementations of argumentation-
based systems and agents have been applied to var-
ious domains: for assisting with privacy manage-
ment in online social networks (K
¨
okciyan et al., 2017;
Ruiz-Dolz et al., 2019); for automatically generat-
ing explanations and recommendations (Cocarascu
et al., 2019; Heras et al., 2020); for assisting with ne-
gotiation protocols (Amgoud et al., 2007; de Jonge
and Sierra, 2017; Bouslama et al., 2020); and for
healthy eating assistance (Thomas et al., 2019) among
others. Some of these works have been comple-
mented with field studies that analyse the variations
on the perceived strength of an argument depend-
ing on non-rational human features (e.g., personal-
ity or social features) (Thomas et al., 2017; Cio-
carlan et al., 2019; Ruiz-Dolz et al., 2021). De-
spite these efforts, we were not able to identify any
work focusing exclusively on the implementation of
an argumentation-based boundedly rational agent or
system. Furthermore, many tools and libraries for
argumentation-based reasoning exist (Alviano, 2017;
Cerutti et al., 2016a; Cerutti et al., 2016b; Craandijk
and Bex, 2020), but bounded rationality is not thor-
oughly brought into consideration.
In this section, different approaches to bounded
rationality in agents and AI have been reviewed,
and a classification of the identified approaches into
the major components of a boundedly rational agent
has been provided. These components define the
three pillars that group most of previous research in
bounded rationality from the AI viewpoint. How-
ever, we observe that no generic frameworks for de-
signing and implementing boundedly rational agents
exist, neither formal frameworks, nor architectural
meta-models. Most of the reviewed research focuses
on a very specific aspect or domain (e.g., affective
computing or human assistance), ignoring the formal
definitions of economic and instrumental rationality,
and without considering their general implications for
bounded rationality in AI.
3 FORMAL FRAMEWORK AND
ARCHITECTURAL
META-MODEL
To address two of the shortcomings identified in Sec-
tion 2, i.e., the lack of generic formal and architectural
frameworks for bounded instrumental rationality, this
Section first introduces an abstract formal framework
for modeling boundedly rational agents, and then an
architectural meta-model for implementing them.
3.1 Formal Framework
Let us introduce an abstract, generic formal frame-
work for a boundedly rational agent. As a prerequi-
site, we introduce a (rational) agent function, which
in turn maximizes an expected utility function, given
a specific percept sequence, in which sets of percepts
are typically temporally ordered.
Definition 1 (Percept Sequence). A percept sequence
S is a sequence hP
0
, ..., P
t
i, where for 0 ≤ i ≤ t, P
i
is a
set of elements (which we call “percepts”).
Let us introduce the expected utility function,
which given a percept sequence and an action a, re-
turns an agent’s expected utility of this action. In this
context, we consider an action a logical literal.
Definition 2 (Expected Utility Function). Let S be a
set of percept sequences (our percept sequence space)
and let A be a set actions (our action space). The ex-
pected utility function u : S × A → R takes a percept
sequence S ∈ S and an action a ∈ A and returns the
action’s expected utility u
e
∈ R given the percept se-
quence.
A Formal Framework for Designing Boundedly Rational Agents
709

Note that for the sake of simplicity, we assume the
expected utility of an action is represented as a real
number. However, we concede that other representa-
tions, like rankings in a preference order, are possible
and indeed preferable in some contexts.
Now, we can define the rational agent function.
Definition 3 (Rational Agent Function). Let S be a
set of percept sequences, let A be a set of actions,
and let u be an expected utility function. The ratio-
nal agent function f
u
: S → A takes a precept se-
quence S ∈ S and returns an action a ∈ A, such that
a ∈ argmax
a
0
∈A
u(a
0
, S).
Given a utility function u and a rational agent
function f
u
: S → A , we call S the percept sequence
space of f
u
and A the action space of f
u
.
To allow for the specification of boundedly ratio-
nal agent, we extend the rational agent function.
Definition 4 (Boundedly Rational Agent Function).
Let S be a set of percept sequences, let A be a set
of actions, let u be an expected utility function, and
let f
u
be a rational agent function. The boundedly
rational agent function g
f
u
, p,q
: S → A takes a per-
cept sequence S ∈ S and returns an action a ∈ A ,
such that for every S ∈ S , it holds that g
f
u
, p,q
(S) =
q( f
u
(p(S)), p(S)), where:
• p : S → S is the percept sequence pre-processing
function;
• q : A × S → A is the action post-processing func-
tion.
Let us introduce three simplistic examples that il-
lustrate how the boundedly rational agent function
can be applied. For all examples, we assume an ac-
tion space A, a percept sequence space S , an expected
utility function u
e
: S × A → R, and a rational agent
function f
u
: S → A.
Example 1: Forgetful Agent. A forgetful bound-
edly rational agent only considers the most recent
percept sequences when deciding on an action.
We define the forgetful agent’s boundedly ratio-
nal agent function g
f
u
, p,q
: S → A , such that for
every S = hP
0
, ..., P
t
i ∈ S , a ∈ A:
p(S) =
(
hP
t−1
, P
t
i, if |S| ≥ 2;
hP
t
i, otherwise;
q(a, S) = a.
Example 2: Imprecisely Utilitarian Agent. An im-
precisely utilitarian agent always take the action
with the “second best” utility, considering its util-
ity function. We define the imprecisely agent’s
boundedly rational function g
0
f
u
, p
0
,q
0
: S → A , such
that for every S = hP
0
, ..., P
t
i ∈ S , a ∈ A:
p
0
(S) = S;
q
0
(a, S) = arg max
a
0
∈A\{a}
u(a
0
, S).
Example 3: Forgetful, Imprecisely Utilitarian
Agent. We can combine the forgetful agent and
the imprecisely utilitarian agent by defining the
boundedly rational agent function g
00
f
u
, p,q
0
: S → A.
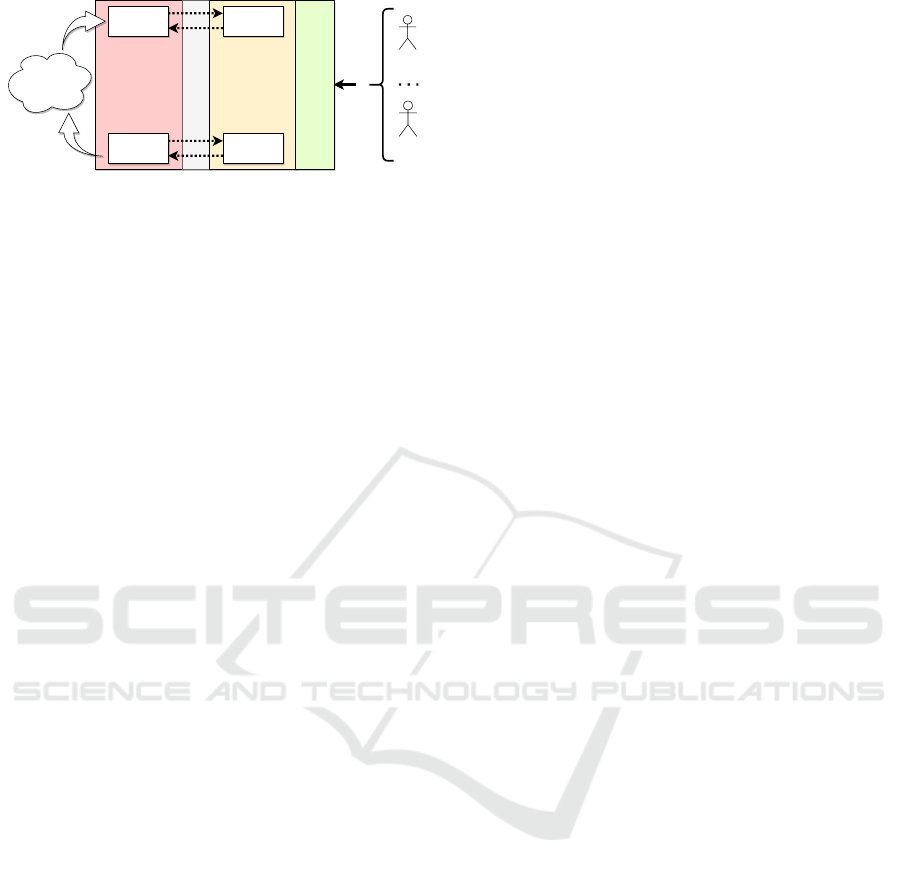
3.2 Architectural Meta-model
Considering the variety of tools and frameworks for
implementing somewhat boundedly rational agents
that have emerged over the years in the literature, we
argue that presenting a generic, technology-agnostic
architecture, as well as a technology-specific instan-
tiation thereof is valuable. The conceptual boundely
rational agent architecture can be described as fol-
lows (see Figure 1). As usual, the architecture mod-
els the interaction of agents with their environment
(and with each other through the environment). In
contrast to other prominent conceptual architectures
like the JaCaMo meta-model (Boissier et al., 2013),
the boundely rational agent architecture does not ex-
plicitly model artifacts and organizations, as they are
considered out of scope. Instead, the focus lies on i)
particular agent internals and ii) the novel concept of
agent-to-agent cognitive theory discovery.
Agent Internals. From an agent internals perspec-
tive, we split the mind of a boundedly rational
agent into two modules: a rational agent module
that may, for example, implement a classical BDI
reasoning loop, and a boundedly rational module,
that constraints the perception, reasoning steps,
and actions of the agent. These modules commu-
nicate via an abstraction layer that serves as a mid-
dleware between the two modules, in particular
in case of technological/implementation-specific
differences. In this way, the boundedly rational
module allows for the systematic relaxation of ra-
tional agent behavior, as defined more precisely
by our formal framework.
Cognitive Theory Discovery. A boundedly rational
agent should be able to make its cognitive theory
discoverable so that other agents can potentially –
if equipped accordingly – interact with the agent
in a way that considers the relaxation of rational-
ity. To allow for this, the boundedly rational agent
architecture features a discovery module for cog-
nitive theory specifications. For example, when
dealing with interactions with human agents, a
discovery module can be specified in terms of the
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
710
Abstraction Layer
Rational
Agent
Module
Agent 1
Agent n
Cognitive Theory Discovery
Percepts
Actions
Boundedly
Rational
Constraint
Module
Action
Constraints
Cognitive Theory
Specification
Percept
Constraints
Environment
Figure 1: Conceptual architecture for boundedly rational
agents.
theory of planned behavior (Ajzen et al., 1991),
a cognitive theory that links a human agent’s be-
liefs to its behavior. The theory manages three
sets of beliefs: attitude, subjective norm, and per-
ceived behavioral control, which together can ex-
pose a human agent’s behavioral intentions. Still,
an agent may choose to not expose all aspects of
its cognitive theory to the environment, for exam-
ple for privacy or cultural reasons; analogously,
a human may opt to not disclose their cognitive
characteristics, e.g., to avoid an exploitation by
malicious parties.
Note that our architecture can be considered as or-
thogonal to rational agents architecture and meta-
models, i.e., it abstains from specifying aspects
that rational agent architectures already cover (like
reasoning-loops) and instead focuses on novel fea-
tures that are central to boundedly rational agents and
to the multi-agent systems in which they (inter)act.
4 DISCUSSION
The objective of the formal framework and meta-
model that we have introduced in the previous sec-
tion is to facilitate precise and nuanced perspectives
on bounded instrumental rationality when designing
and implementing autonomous agents. Research di-
rections that to some extent assume a relaxation of ra-
tionality (either in the formal economic or the instru-
mental sense), i.e., the ones that have been summa-
rized in Section 2, can potentially be integrated with
our work.
Affective Agents. Human-machine interaction, the
simulation of human behavior, or the simulation
of human social organizations are some of the ar-
eas that can benefit from the advances made in the
field of affective computing and affective agents.
Models that allow to constrain the level of instru-
mental rationality of the agents, such as the one
proposed in this paper, contribute to improve the
simulation of human-like affective behaviors.
Explainable Agents. With an increasing demand for
transparency/explainability in intelligent systems,
a need for techniques to create two-way explana-
tory interaction systems arises. In this context, the
boundedly rational agent framework can provide
i) an understanding of human behavior to the arti-
ficial agent and ii) an understanding of the sys-
tem’s behavior to humans in a human-readable
format; in this way, human-AI interaction capabil-
ities can be improved and greater levels of trans-
parency in AI systems can be provided.
Human-aware Agents. One goal in the field of
human-AI interaction is to create cognitive inter-
active systems that are human-aware and whose
actions and deliberative processes are restricted
by interaction constraints that reflect human be-
havior. In such systems, the boundedly ratio-
nal agent framework can serve as a foundation
for modeling humans. This can provide systems
a theory of mind (ToM) (Frith and Frith, 2005)
of the human, through which systems can under-
stand and predict human reasoning and behavior,
and plan their actions in a human-aware manner
(e.g., by considering emotional, motivational and
behavioral constraints in their interactions).
Argumentation-enabled Agents. Argumentation
can be applied to boundedly rational agent
internals for belief revision purposes. Also,
argumentation can be used to facilitate coopera-
tion between agents whose cognitive theories or
instantiations thereof are not fully aligned, for
example as outlined in (Kampik et al., 2019b).
Our research can be extended into different direc-
tions. i) Formally, the framework can be integrated
with particular cognitive theories, such as prospect
theory (Kahneman and Tversky, 1979) and theory of
planned behavior (Ajzen et al., 1991). Also, the ab-
stract framework can be filled with structure, for ex-
ample using logic-based approaches that treat belief
revision as a first-class abstraction. ii) From an engi-
neering perspective, reference implementations of the
architectural meta-model in different programming
languages (agent-oriented or agent-agnostic) can be
provided. iii) Empirically, the value the framework
may provide for particular use cases, for example
to facilitate the explainability of boundedly rational
agents, can be analyzed.
5 CONCLUSION
In this paper, we have introduced a generic, abstract
formal framework for designing boundedly rational
A Formal Framework for Designing Boundedly Rational Agents
711

agents, as well as an architectural meta-model for im-
plementing such agents in practice, or as engineering
research artifacts. These models can potentially fa-
cilitate systematic approaches to engineering bound-
edly rational agents, from both formal foundations-
oriented and applied perspectives. Particularly rele-
vant future works are the integration of the abstract
formal framework with cognitive theories, for exam-
ple prospect theory (Kahneman and Tversky, 1979)
and the theory of planned behavior (Ajzen et al.,
1991), as well as the implementation of the architec-
tural meta-model.
ACKNOWLEDGEMENTS
This work was partially supported by the Wallen-
berg AI, Autonomous Systems and Software Pro-
gram (WASP) funded by the Knut and Alice Wal-
lenberg Foundation, the Spanish Government project
PID2020-113416RB-I00, and GVA-CEICE project
PROMETEO/2018/002.
REFERENCES
Ajzen, I. et al. (1991). The theory of planned behavior. Or-
ganizational behavior and human decision processes,
50(2):179–211.
Alchourr
´
on, C. E., G
¨
ardenfors, P., and Makinson, D.
(1985). On the logic of theory change: Partial meet
contraction and revision functions. Journal of Sym-
bolic Logic, 50(2):510–530.
Alfonso, B., Vivancos, E., and Botti, V. (2017). Toward
formal modeling of affective agents in a BDI archi-
tecture. ACM Transactions on Internet Technology
(TOIT), 17(1):5.
Alviano, M. (2017). The pyglaf argumentation reasoner. In
Technical Communications of the 33rd International
Conference on Logic Programming, ICLP 2017, vol-
ume 58, pages 2:1–2:3. Schloss Dagstuhl - Leibniz-
Zentrum f
¨
ur Informatik.
Amgoud, L., Dimopoulos, Y., and Moraitis, P. (2007). A
general framework for argumentation-based negotia-
tion. In Argumentation in Multi-Agent Systems, 4th In-
ternational Workshop, ArgMAS, volume 4946, pages
1–17. Springer.
Anjomshoae, S., Najjar, A., Calvaresi, D., and Fr
¨
amling,
K. (2019). Explainable agents and robots: Results
from a systematic literature review. In Proceedings
of the 18th International Conference on Autonomous
Agents and MultiAgent Systems, AAMAS ’19, page
1078–1088, Richland, SC. International Foundation
for Autonomous Agents and Multiagent Systems.
Atkinson, K., Baroni, P., Giacomin, M., Hunter, A.,
Prakken, H., Reed, C., Simari, G. R., Thimm, M., and
Villata, S. (2017). Towards artificial argumentation.
AI Mag., 38(3):25–36.
Baroni, P., Caminada, M., and Giacomin, M. (2011). An
introduction to argumentation semantics. Knowl. Eng.
Rev., 26(4):365–410.
Boissier, O., Bordini, R. H., H
¨
ubner, J. F., Ricci, A., and
Santi, A. (2013). Multi-agent oriented programming
with jacamo. Science of Computer Programming,
78(6):747 – 761.
Bordini, R. H., H
¨
ubner, J. F., and Wooldridge, M. (2007).
Programming Multi-Agent Systems in AgentSpeak Us-
ing Jason (Wiley Series in Agent Technology). John
Wiley & Sons, Inc., Hoboken, NJ, USA.
Bouslama, R., Jord
´
an, J., Heras, S., and Amor, N. B. (2020).
Strategies in case-based argumentation-based negotia-
tion: An application for the tourism domain. In High-
lights in Practical Applications of Agents, Multi-Agent
Systems, and Trust-worthiness. The PAAMS Collec-
tion - International Workshops of PAAMS, volume
1233, pages 205–217. Springer.
Br
¨
annstr
¨
om, A., Kampik, T., and Nieves, J. C. (2020). To-
wards human-aware epistemic planning for promoting
behavior-change. In Workshop on Epistemic Planning
(EpiP)@ ICAPS, Online, October 26-30, 2020.
Broekens, J., Harbers, M., Hindriks, K., van den Bosch,
K., Jonker, C., and Meyer, J.-J. (2010). Do you get
it? user-evaluated explainable bdi agents. In Dix, J.
and Witteveen, C., editors, Multiagent System Tech-
nologies, pages 28–39, Berlin, Heidelberg. Springer
Berlin Heidelberg.
Caminada, M. (2017). Rationality postulates: applying
argumentation theory for non-monotonic reasoning.
Journal of Applied Logics, 4(8):2707–2734.
Cardoso, R. C. and Ferrando, A. (2021). A review of agent-
based programming for multi-agent systems. Comput-
ers, 10(2):16.
Cerutti, F., Vallati, M., and Giacomin, M. (2016a). Efficient
and off-the-shelf solver: jargsemsat. In Computa-
tional Models of Argument - Proceedings of COMMA,
volume 287, pages 465–466. IOS Press.
Cerutti, F., Vallati, M., and Giacomin, M. (2016b). Where
are we now? state of the art and future trends
of solvers for hard argumentation problems. In
Computational Models of Argument - Proceedings of
COMMA, volume 287, pages 207–218. IOS Press.
Chakraborti, T. (2018). Foundations of Human-Aware
Planning-A Tale of Three Models. PhD thesis, Ari-
zona State University.
Chakraborti, T., Sreedharan, S., and Kambhampati, S.
(2018). Human-aware planning revisited: A tale of
three models. In IJCAI-ECAI XAI/ICAPS XAIP Work-
shops.
Ciocarlan, A., Masthoff, J., and Oren, N. (2019). Ac-
tual persuasiveness: Impact of personality, age and
gender on message type susceptibility. In Persuasive
Technology: Development of Persuasive and Behav-
ior Change Support Systems - 14th International Con-
ference, PERSUASIVE 2019, Limassol, Cyprus, April
9-11, 2019, Proceedings, volume 11433, pages 283–
294. Springer.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
712

Cirillo, M., Karlsson, L., and Saffiotti, A. (2010). Human-
aware task planning: An application to mobile robots.
ACM Transactions on Intelligent Systems and Tech-
nology (TIST), 1(2):1–26.
Cocarascu, O., Rago, A., and Toni, F. (2019). Extract-
ing dialogical explanations for review aggregations
with argumentative dialogical agents. In Elkind, E.,
Veloso, M., Agmon, N., and Taylor, M. E., edi-
tors, Proceedings of the 18th International Conference
on Autonomous Agents and MultiAgent Systems, AA-
MAS ’19, Montreal, QC, Canada, May 13-17, 2019,
pages 1261–1269. International Foundation for Au-
tonomous Agents and Multiagent Systems.
Craandijk, D. and Bex, F. (2020). Deep learning for ab-
stract argumentation semantics. In Proceedings of the
Twenty-Ninth International Joint Conference on Arti-
ficial Intelligence, IJCAI 2020, pages 1667–1673. ij-
cai.org.
ˇ
Cyras, K., Rago, A., Albini, E., Baroni, P., and Toni, F.
(2021). Argumentative XAI: A Survey. In Zhou, Z.-
H., editor, 30th International Joint Conference on Ar-
tificial Intelligence, pages 4392–4399, Montreal. IJ-
CAI.
Dalib
´
on, S. F., Martinez, D., and Simari, G. (2012). An ap-
proach to emotion-based abstract argumentative rea-
soning. In 13th Argentine Symposium on Artificial In-
telligence.
Davis, C., Patte, K., Tweed, S., and Curtis, C. (2007).
Personality traits associated with decision-making
deficits. Personality and Individual Differences,
42(2):279–290.
de Jonge, D. and Sierra, C. (2017). D-brane: a diplo-
macy playing agent for automated negotiations re-
search. Appl. Intell., 47(1):158–177.
Dias, J., Mascarenhas, S., and Paiva, A. (2014). FA-
tiMA Modular: Towards an Agent Architecture with a
Generic Appraisal Framework, pages 44–56. Springer
International Publishing, Cham.
Dung, P. M. (1995). On the acceptability of arguments
and its fundamental role in nonmonotonic reasoning,
logic programming and n-person games. Artif. Intell.,
77(2):321–358.
Floyd, M. W., Roberts, M., and Aha, D. W. (2018). Hybrid
goal selection and planning in a goal reasoning agent
using partially specified preferences. In Proceedings
of the Workshop on Goal Reasoning (held at the 27th
Int’l Joint Conf. on AI and the 23rd European Conf.
on AI).
Frith, C. and Frith, U. (2005). Theory of mind. Current
biology, 15(17):R644–R645.
Garc
´
ıa, A. J. and Simari, G. R. (2004). Defeasible logic
programming: An argumentative approach. Theory
Pract. Log. Program., 4(1-2):95–138.
Gebhard, P. (2005). Alma: a layered model of affect. In
Proceedings of the fourth international joint confer-
ence on Autonomous agents and multiagent systems,
pages 29–36.
Gelfond, M. and Lifschitz, V. (1998). Action languages.
Gintis, H. (2018). Rational Choice Explained and De-
fended, pages 95–114. Springer International Publish-
ing, Cham.
Grecucci, A., Giorgetta, C., Lorandini, S., Sanfey, A. G.,
and Bonini, N. (2020). Changing decisions by chang-
ing emotions: Behavioral and physiological evidence
of two emotion regulation strategies. Journal of Neu-
roscience, Psychology, and Economics, 13(3):178.
Helmert, M. and Geffner, H. (2008). Unifying the causal
graph and additive heuristics. In ICAPS, pages 140–
147.
Heras, S., Palanca, J., Rodriguez, P., Duque-M
´
endez, N.,
and Julian, V. (2020). Recommending learning objects
with arguments and explanations. Applied Sciences,
10(10):3341.
Kahneman, D. and Tversky, A. (1979). Prospect Theory:
An Analysis of Decision Under Risk, chapter Chapter
6, pages 99–127.
Kampik, T. and Gabbay, D. (2021). Explainable reason-
ing in face of contradictions: From humans to ma-
chines. In Calvaresi, D., Najjar, A., Winikoff, M., and
Fr
¨
amling, K., editors, Explainable and Transparent
AI and Multi-Agent Systems, pages 280–295, Cham.
Springer International Publishing.
Kampik, T., Nieves, J. C., and Lindgren, H. (2019a).
Explaining sympathetic actions of rational agents.
In Calvaresi, D., Najjar, A., Schumacher, M., and
Fr
¨
amling, K., editors, Explainable, Transparent Au-
tonomous Agents and Multi-Agent Systems, pages 59–
76, Cham. Springer International Publishing.
Kampik, T., Nieves, J. C., and Lindgren, H. (2019b). Im-
plementing argumentation-enabled empathic agents.
In Slavkovik, M., editor, Multi-Agent Systems, pages
140–155, Cham. Springer International Publishing.
K
¨
ockemann, U., Pecora, F., and Karlsson, L. (2014).
Grandpa hates robots-interaction constraints for plan-
ning in inhabited environments. In Twenty-Eighth
AAAI Conference on Artificial Intelligence.
K
¨
okciyan, N., Yaglikci, N., and Yolum, P. (2017). An argu-
mentation approach for resolving privacy disputes in
online social networks. ACM Trans. Internet Techn.,
17(3):27:1–27:22.
Kravari, K. and Bassiliades, N. (2015). A survey of agent
platforms. Journal of Artificial Societies and Social
Simulation, 18(1):11.
Logan, B. (2018). An agent programming manifesto. In-
ternational Journal of Agent-Oriented Software Engi-
neering, 6(2):187–210.
Mascardi, V., Weyns, D., Ricci, A., Earle, C. B., Casals,
A., Challenger, M., Chopra, A., Ciortea, A., Dennis,
L. A., D
´
ıaz, A. F., El Fallah-Seghrouchni, A., Fer-
rando, A., Fredlund, L.-r., Giunchiglia, E., Guessoum,
Z., G
¨
unay, A., Hindriks, K., Iglesias, C. A., Logan, B.,
Kampik, T., Kardas, G., Koeman, V. J., Larsen, J. B.,
Mayer, S., M
´
endez, T., Nieves, J. C., Seidita, V., Teze,
B. T., Varga, L. Z., and Winikoff, M. (2019). Engi-
neering multi-agent systems: State of affairs and the
road ahead. SIGSOFT Softw. Eng. Notes, 44(1):18–28.
Miller, T. (2019). Explanation in artificial intelligence: In-
sights from the social sciences. Artificial Intelligence,
267:1–38.
A Formal Framework for Designing Boundedly Rational Agents
713

Mualla, Y., Tchappi, I., Kampik, T., Najjar, A., Calvaresi,
D., Abbas-Turki, A., Galland, S., and Nicolle, C.
(2021). The quest of parsimonious xai: a human-agent
architecture for explanation formulation. Artificial In-
telligence, page 103573.
Ojha, S. and Williams, M.-A. (2017). Emotional appraisal:
A computational perspective. In Fifth annual confer-
ence on advances in cognitive systems. ACS.
Osborne, M. J. and Rubinstein, A. (2020). Models in Mi-
croeconomic Theory. Open Book Publishers.
Paiva, A., Leite, I., Boukricha, H., and Wachsmuth, I.
(2017). Empathy in virtual agents and robots: a sur-
vey. ACM Transactions on Interactive Intelligent Sys-
tems (TiiS), 7(3):1–40.
Picard, R. W. (1997). Affective Computing. The MIT Press.
Pollock, J. L. (1987). Defeasible reasoning. Cogn. Sci.,
11(4):481–518.
Rao, A. S. (1996). Agentspeak(l): Bdi agents speak out
in a logical computable language. In Van de Velde,
W. and Perram, J. W., editors, Agents Breaking Away,
pages 42–55, Berlin, Heidelberg. Springer Berlin Hei-
delberg.
Ruiz-Dolz, R. (2020). Towards an artificial argumentation
system. In Proceedings of the Twenty-Ninth Interna-
tional Joint Conference on Artificial Intelligence, IJ-
CAI 2020, pages 5206–5207. ijcai.org.
Ruiz-Dolz, R., Alemany, J., Heras, S., and Garc
´
ıa-Fornes,
A. (2021). On the prevention of privacy threats: How
can we persuade our social network users? CoRR,
abs/2104.10004.
Ruiz-Dolz, R., Heras, S., Alemany, J., and Garc
´
ıa-Fornes,
A. (2019). Towards an argumentation system for as-
sisting users with privacy management in online so-
cial networks. In Proceedings of the 19th Work-
shop on Computational Models of Natural Argument,
CMNA@PERSUASIVE, volume 2346, pages 17–28.
CEUR-WS.org.
Segerstrom, S. C. and Smith, G. T. (2019). Personality and
coping: Individual differences in responses to emo-
tion. Annual review of psychology, 70:651–671.
Seyfarth, R. M. and Cheney, D. L. (2015). Social cognition.
Animal Behaviour, 103:191–202.
Talamadupula, K., Benton, J., Kambhampati, S., Schermer-
horn, P., and Scheutz, M. (2010). Planning for human-
robot teaming in open worlds. ACM Transactions on
Intelligent Systems and Technology (TIST), 1(2):1–24.
Taverner, J., Vivancos, E., and Botti, V. (2021). A fuzzy ap-
praisal model for affective agents adapted to cultural
environments using the pleasure and arousal dimen-
sions. Information Sciences, 546:74–86.
Thimm, M. (2012). A probabilistic semantics for abstract
argumentation. In ECAI 2012 - 20th European Con-
ference on Artificial Intelligence, volume 242, pages
750–755. IOS Press.
Thomas, R. J., Masthoff, J., and Oren, N. (2017). Adapt-
ing healthy eating messages to personality. In Per-
suasive Technology: Development and Implementa-
tion of Personalized Technologies to Change Attitudes
and Behaviors - 12th International Conference, vol-
ume 10171, pages 119–132. Springer.
Thomas, R. J., Masthoff, J., and Oren, N. (2019). Is ar-
gumessage effective? A critical evaluation of the per-
suasive message generation system. In Persuasive
Technology: Development of Persuasive and Behavior
Change Support Systems - 14th International Confer-
ence, volume 11433, pages 87–99. Springer.
Tulli, S., Correia, F., Mascarenhas, S., Gomes, S., Melo,
F. S., and Paiva, A. (2019). Effects of agents’ trans-
parency on teamwork. In Calvaresi, D., Najjar, A.,
Schumacher, M., and Fr
¨
amling, K., editors, Explain-
able, Transparent Autonomous Agents and Multi-
Agent Systems, pages 22–37, Cham. Springer Inter-
national Publishing.
ˇ
Cyras, K., Badrinath, R., Mohalik, S. K., Mujumdar, A.,
Nikou, A., Previti, A., Sundararajan, V., and Feljan,
A. V. (2020). Machine reasoning explainability. arXiv
preprint arXiv:2009.00418.
Wooldridge, M. (1997). Agent-based software engineering.
IEE Proceedings-Software Engineering, 144(1):26–
37.
Zhang, Y., Sreedharan, S., Kulkarni, A., Chakraborti, T.,
Zhuo, H. H., and Kambhampati, S. (2017). Plan ex-
plicability and predictability for robot task planning.
In 2017 IEEE International Conference on Robotics
and Automation (ICRA), pages 1313–1320.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
714
