
Scenario-assisted Deep Reinforcement Learning
Raz Yerushalmi
1
, Guy Amir
2 a
, Achiya Elyasaf
3 b
, David Harel
1
, Guy Katz
2
and Assaf Marron
1 c
1
Department of Computer Science and Applied Mathematics, Weizmann Institute of Science, Rehovot 76100, Israel
2
School of Computer Science and Engineering, The Hebrew University of Jerusalem, Givat Ram, Jerusalem 91904, Israel
3
Software and Information Systems Engineering, Ben-Gurion University of the Negev, Beer-Sheva 8410501, Israel
Keywords:
Machine Learning, Scenario-based Modeling, Rule-based Specifications, Domain Expertise.
Abstract:
Deep reinforcement learning has proven remarkably useful in training agents from unstructured data. However,
the opacity of the produced agents makes it difficult to ensure that they adhere to various requirements posed
by human engineers. In this work-in-progress report, we propose a technique for enhancing the reinforcement
learning training process (specifically, its reward calculation), in a way that allows human engineers to di-
rectly contribute their expert knowledge, making the agent under training more likely to comply with various
relevant constraints. Moreover, our proposed approach allows formulating these constraints using advanced
model engineering techniques, such as scenario-based modeling. This mix of black-box learning-based tools
with classical modeling approaches could produce systems that are effective and efficient, but are also more
transparent and maintainable. We evaluated our technique using a case-study from the domain of internet
congestion control, obtaining promising results.
1 INTRODUCTION
Deep neural networks (DNNs) have proven highly
successful in addressing hard-to-specify cognitive
tasks. Deep reinforcement learning (DRL) is a par-
ticular method for producing DNNs, which is appli-
cable in cases where the training data is unstructured
— e.g., in games (Ye et al., 2020), in autonomous
driving (Kiran et al., 2021), smart city communi-
cations (Xia et al., 2021), manufacturing (Li et al.,
2022), chat bots (Mohamad Suhaili et al., 2021),
context-aware systems (Elyasaf, 2021), and many
others. As this trend continues, it is likely that DRL
will gain a foothold in many systems of critical im-
portance.
Despite the success of DRL, and in particular
its generally superior performance to that of hand-
crafted code in many kinds of applications, vari-
ous problematic aspects of this paradigm have be-
gun to emerge. One issue is that DRL agents are
typically trained on some distribution of inputs (de-
scribed, e.g., using a Markov Decision Process), but
this distribution might differ from the distribution
a
https://orcid.org/0000-0002-7951-7795
b
https://orcid.org/0000-0002-4009-5353
c
https://orcid.org/0000-0001-5904-5105
that the agent encounters after deployment (Eliyahu
et al., 2021). Another issue is various vulnerabilities
that exist in many DNNs, and in particular in DRL
agents (Szegedy et al., 2013), such as sensitivity to
adversarial perturbations. When such issues are dis-
covered, the DRL agent often needs to be modified
or enhanced; but unfortunately, such routine actions
are known to be extremely difficult for DRL agents,
which are largely considered “black boxes” (Goodfel-
low et al., 2016). Specifically, their underlying DNNs
are opaque to the human eye, making them hard to
interpret; and the DRL training process itself is com-
putationally expensive and time-consuming, making
it infeasible to retrain the agent whenever circum-
stances, or requirements, change. Much research is
being conducted on DNN interpretability and explain-
ability (Ribeiro et al., 2016; Samek et al., 2018) as
well as on using formal methods to facilitate reason-
ing about DRL agents (Kazak et al., 2019), but these
efforts are still nascent, and typically suffer from lim-
ited scalability.
In this paper, we advocate a direction of work for
addressing this important gap, by integrating model-
ing techniques into the DRL training process. The
idea is to leverage the strengths of classical specifica-
tion approaches, which are normally applied in pro-
cedural or rule-based modeling, and carry these ad-
310
Yerushalmi, R., Amir, G., Elyasaf, A., Harel, D., Katz, G. and Marron, A.
Scenario-assisted Deep Reinforcement Learning.
DOI: 10.5220/0010904700003119
In Proceedings of the 10th International Conference on Model-Driven Engineering and Software Development (MODELSWARD 2022), pages 310-319
ISBN: 978-989-758-550-0; ISSN: 2184-4348
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

vantages over to the training process of DRL agents.
More specifically, we propose to sometimes override
the computation of the DRL agent’s reward func-
tion (Sutton and Barto, 2018), which is then reflected
in the return that the agent is being trained to maxi-
mize. By creating a connection that will allow model-
ers to formulate a specification in their modeling for-
malism of choice, and then have this specification af-
fect the computed reward so that it reflects how well
the specification is satisfied, we seek to generate a
DRL agent that better conforms to the system’s re-
quirements.
Our proposed approach is general, in the sense
that numerous modeling formalisms could be inte-
grated into the DRL process. As a proof-of-concept,
and for evaluation purposes, we focus here on a par-
ticular brand of modeling schemes, collectively re-
ferred to as scenario-based modeling (SBM) (Damm
and Harel, 2001; Harel et al., 2012b). In SBM, a
modeler creates small, stand-alone scenarios, each re-
flecting a certain desirable or undesirable behavior of
the system under development. These scenarios are
fully executable, and when interwoven together bring
about an executable model of the desired global sys-
tem behavior. A key feature of SBM is the ability
of each scenario to specify forbidden behavior, which
the system as a whole should avoid. SBM has been
shown to be quite effective in modeling systems from
varied domains, such as web-servers (Harel and Katz,
2014), cache coherence protocols (Katz et al., 2015),
games (Harel et al., 2011), production control (Harel
et al., 2005), biological systems (Kugler et al., 2008),
transportation (Greenyer et al., 2016a) and others.
During DRL training, the agent may be regarded
as a reactive system: it receives an input from the en-
vironment, reacts, observes the computed reward that
its actions have produced, and optionally adjusts its
behavior for the future. In order to integrate SBM and
DRL, we suggest to execute the scenario-based model
in parallel to the DRL agent’s training. Then, when-
ever the agent performs an action that the SBM model
forbids, we propose to reflect this by penalizing the
agent, through its reward values. We argue that this
process would increase the likelihood that the agent
learns, in addition to its original goals, the constraints
expressed through the scenario-based model.
As a case study, we chose to focus on the Aurora
system (Jay et al., 2019), which is a DRL-based In-
ternet congestion control algorithm. The algorithm is
deployed at the sender node of a communication sys-
tem, and controls the sending rate of that node, with
the goal of optimizing the communication system’s
throughput. As part of our evaluation, we demonstrate
how a scenario-based specification can be used to in-
fluence the training of the Aurora DRL agent, in order
to improve its fairness by preventing it from repeat-
edly increasing its sending rate at the possible expense
of other senders on the same link. Our experiments
show that an agent trained this way is far less likely
to exhibit the unwanted behavior, when compared to
an agent trained by DRL alone, thus highlighting the
potential of our approach.
The rest of the paper is organized as follows. In
Section 2 we provide background on scenario-based
modeling and deep reinforcement learning. In Sec-
tions 3 and 4 we describe the integration between
SBM and DRL, first conceptually and then techni-
cally. In Section 5 we describe our case study. We
follow with a discussion of related work in Section 6
and conclude in Section 7.
2 BACKGROUND
2.1 Scenario-based Modeling
Scenario-based modeling (SBM) (Damm and Harel,
2001; Harel and Marelly, 2003; Harel et al., 2012b) is
a modeling paradigm, designed to facilitate the devel-
opment of reactive systems from components that are
aligned with the way humans perceive and describe
system behavior. The focus of SBM is on inter-object,
system-wide behaviors, thus differing from the more
conventional, object-centric paradigms. In SBM, a
system is comprised of components called scenario
objects, each of which describes a single desired or
undesired behavior of the system. This behavior is
formalized as a sequence of events. A scenario-based
model is fully executable: when it runs, all its sce-
nario objects are composed and run in parallel, in
a synchronized fashion, resulting in cohesive system
behavior. The resulting model thus complies with the
requirements and constraints of each of the participat-
ing scenario objects (Harel and Marelly, 2003; Harel
et al., 2012b).
More concretely, each scenario object in a
scenario-based model can be regarded as a transition
system, whose states are referred to as synchroniza-
tion points. The scenario object transitions between
synchronization points according to the triggering of
events by a global event selection mechanism. At each
synchronization point, the scenario object affects the
triggering of the next event by declaring events that it
requests and events that it blocks. These declarations
encode, respectively, desirable and forbidden actions,
as seen from the perspective of that particular sce-
nario object. Scenario objects can also declare events
that they passively wait-for, thus asking to be notified
Scenario-assisted Deep Reinforcement Learning
311
when these occur. After making its event declarations,
the scenario object is suspended until an event that it
requested or waited-for is triggered, at which point
the scenario resumes and may transition to another
synchronization point.
At execution time, all scenario objects are run in
parallel, until they all reach a synchronization point.
Then, the declarations of all requested and blocked
events are collected by the event selection mecha-
nism, which first selects, and then triggers one of the
events that is requested by at least one scenario object
and is blocked by none.
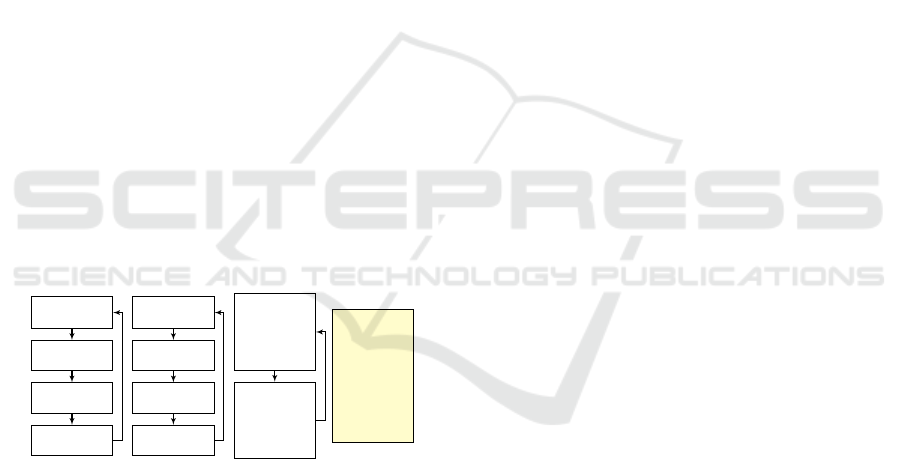
Fig. 1 (borrowed from (Harel et al., 2012a)) de-
picts a scenario-based model of a simple system for
controlling the temperature and fluid level in a water
tank. Each scenario object is depicted as a transition
system, in which the nodes represent synchronization
points. The transition edges are associated with the
requested or waited-for events in the preceding node.
The scenarios ADDHOTWATER and ADDCOLDWA-
TER repeatedly wait for WATERLOW events and then
request three times the event ADDHOT or ADDCOLD,
respectively. Since, by default, these six events may
be triggered in any order, a new scenario STABILITY
is introduced, with the intent of keeping the tempera-
ture more stable. It enforces the interleaving of AD-
DHOT and ADDCOLD events by alternately blocking
them. The resulting execution trace is depicted in the
event log.
wait for
WATERLOW
request
ADDHOT
request
ADDHOT
request
ADDHOT
ADDHOTWATER
wait for
WATERLOW
request
ADDCOLD
request
ADDCOLD
request
ADDCOLD
ADDCOLDWATER
wait for
ADDHOT
while
blocking
ADDCOLD
wait for
ADDCOLD
while
blocking
ADDHOT
STABILITY
···
WATERLOW
ADDHOT
ADDCOLD
ADDHOT
ADDCOLD
ADDHOT
ADDCOLD
···
EVENT LOG
Figure 1: (Borrowed from (Harel et al., 2012a)) A scenario-
based model for controlling water temperature and level.
Selecting the next event to be triggered, from
among all events that are requested and not blocked,
can be customized to fit the system at hand. Com-
mon policies include arbitrary selection, randomized
selection, a selection based on predefined priorities,
or a selection based on look-ahead for achieving cer-
tain outcomes (Harel et al., 2002).
For our present purposes, it is convenient to think
of scenario objects in terms of transition systems. In
practice, SBM is supported in a variety of textual
and visual frameworks. Notable examples include the
language of live sequence charts (LSC), where SBM
concepts are applied to produce modal sequence dia-
grams (Damm and Harel, 2001; Harel and Marelly,
2003); implementations in various high level lan-
guages, such as Java, C, C++, Erlang, JavaScript, and
Python (see, e.g., (Harel et al., 2012b)); and various
domain specific languages (Greenyer et al., 2016a)
and extensions (Harel et al., 2020; Katz et al., 2019).
A particularly useful trait of SBM is that the
resulting models are amenable to model checking,
and facilitate compositional verification (Harel et al.,
2011; Harel et al., 2013b; Harel et al., 2015c; Katz
et al., 2015; Katz, 2013; Harel et al., 2015b). Thus,
it is often possible to apply formal verification to
ensure that a scenario-based model satisfies various
criteria, either as a stand-alone model or as a com-
ponent within a larger system. Automated analy-
sis techniques can also be used to execute scenario-
based models in distributed architectures (Harel et al.,
2015a; Steinberg et al., 2018; Steinberg et al., 2017;
Greenyer et al., 2016b; Harel et al., 2013a), to au-
tomatically repair these models (Harel et al., 2014;
Harel et al., 2012a; Katz, 2021b), and to augment
them in various ways, e.g., as part of the Wise Com-
puting initiative (Harel et al., 2018; Marron et al.,
2016; Harel et al., 2016a; Harel et al., 2016b).
For our work here, namely the injection of
domain-specific knowledge into the DRL training
procedure, SBM is an attractive choice, as it is for-
mal, executable, and facilitates incremental develop-
ment (Gordon et al., 2012; Alexandron et al., 2014).
Furthermore, its natural alignment with how experts
may describe the specification of the system at hand
helps in transparently highlighting important parts of
the training procedure. Indeed, using SBM to comple-
ment DRL was demonstrated in the past, although the
focus so far has been on guarding an already-trained
DRL agent, rather than affecting what the agent actu-
ally learns (Katz, 2020; Katz and Elyasaf, 2021).
2.2 Deep Reinforcement Learning
Deep reinforcement learning (Sutton and Barto,
2018) is a method for automatically producing a
decision-making agent, whose goal during training is
to achieve a high return (according to some function)
through interactions with its environment.
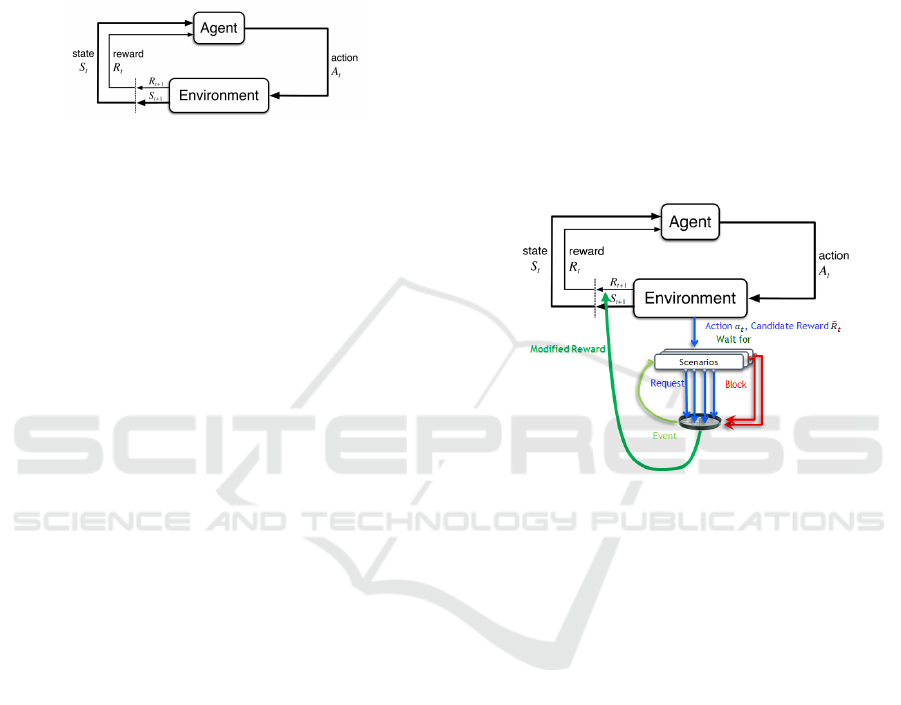
Fig. 2 depicts the basic DRL learning cycle. The
agent and its environment interact at discrete time
steps t ∈ {0, 1, 2, 3, . . .}. At each time step t, the agent
observes the environment’s state s
t
, and selects its
action a
t
accordingly. In the subsequent time step
t + 1, and as a result of its action a
t
at time t, the
agent receives its reward R
t
= R(s
t
, a
t
), the environ-
ment moves to state s
t+1
, and the process repeats.
Through this interaction, the agent gradually learns a
MODELSWARD 2022 - 10th International Conference on Model-Driven Engineering and Software Development
312
policy function f : s
t
→ a
t
that maximizes its return
G
t
, the future cumulative discounted reward:
G
t
=
∞
∑
k=0
γ
k
R
t+k+1
where R
t
is the reward at time t, and γ is a discount
rate parameter, 0 ≤ γ ≤ 1.
Figure 2: (Borrowed from (Sutton and Barto, 2018)) The
agent-environment interaction in reinforcement learning.
It is commonly accepted that specifying an appro-
priate reward function R
t
(as function of the action a
t
in state s
t
) is crucial to the success of the DRL train-
ing process. Consequently, this topic has received sig-
nificant attention (Ng et al., 1999; Zou et al., 2019;
Sutton and Barto, 2018). As we later explain, the ap-
proach that we advocate here is complementary to this
line of research: we propose to augment the reward
function with constraints and specifications provided
by domain experts.
3 INTEGRATING SBM INTO THE
REWARD FUNCTION
Our proposed approach is to integrate a scenario-
based model into the DRL training loop, in order to
instruct the agent being trained to follow the con-
straints and specifications embodied in those sce-
narios. Specifically, we create a one-to-one map-
ping between the DRL agent’s possible actions and
a dedicated subset of the events in the scenario-based
model, so that the scenario objects may react to the
agent’s actions.
We execute the scenario-based model alongside
the agent under training, and, if at time step t we
denote the model’s state ˜s
t
, the agent’s reward func-
tion R
t
is computed as follows: (i) at time step t, the
agent selects an action a
t
; (ii) the environment reacts
to a
t
, transitions to a new state s
t+1
, and computes
a candidate reward value
˜
R
t
; (iii) the scenario-based
model also receives a
t
, and transitions to a new state
˜s
t+1
; (iv) if a
t
is blocked in state ˜s
t
, the scenario-based
model penalizes the agent by decreasing the reward:
R
t
=
(
α ·
˜
R
t
− ∆ ; if ˜s
t
a
t
−→ ˜s
t+1
is blocked
˜
R
t
; otherwise
(1)
for some constants α ∈ [−1, 1] and ∆ ≥ 0; and (v) R
t
is
returned to the agent as the reward value at this step.
The new training process is illustrated in Fig. 3. The
motivation for these changes in the training process
is to allow the DRL agent to learn a policy that satis-
fies the requirements encoded in the original reward
function, while at the same time learning to satisfy
the specifications encoded as scenarios. This is done
without changing the interface between the agent and
its learning environment. Observe that the scenario-
based model is currently aware of its own internal
state and of the actions selected by the DRL agent; but
is unaware of the environment state s
t
. Allowing the
scenario objects to view also the environment state,
which may be required in more complex systems, is
left for future work.
Figure 3: The agent-environment interaction in DRL inte-
grated with SBM: At each time-step, the environment cal-
culates a candidate reward
˜
R
t
based on its state s
t
, and the
agent action a
t
. The scenario-based model is executed in
parallel, and may reduce
˜
R
t
if a
t
is a forbidden action in its
state ˜s
t
.
Selecting an appropriate penalty policy, i.e. se-
lecting the α and ∆ constants, can of course have a
significant impact on the learned policy. Considera-
tion should be given to the balance between allow-
ing the agent to learn a policy that solves the original
problem, and encouraging it to follow the SBM spec-
ifications.
Let us consider again the “hot/cold” example of
Fig. 1, this time from a DRL perspective. Suppose
we want to train a DRL agent whose goal is to keep
the water temperature steady, by mixing hot and cold
water. There are many strategies that would achieve
this goal; but suppose we also wish to introduce a con-
straint that the agent should avoid two consecutive ad-
ditions of hot water or of cold water. We can achieve
this by creating a simple scenario-based model com-
prised of the Stability scenario (Fig. 1), and integrat-
ing it into the training process. This scenario object
would then penalize the DRL agent whenever it per-
forms the undesirable sequence of actions, pushing it
Scenario-assisted Deep Reinforcement Learning
313

towards learning the desired policy.
4 PROOF-OF-CONCEPT
IMPLEMENTATION
We have created a simple proof-of-concept imple-
mentation of our approach, by extending the AI-
Gym Python framework for training DRL agents
(Brockman et al., 2016). Specifically, we connected
the AI-Gym environment object (env) to the BP-Py
framework for specifying scenario-based models in
Python (Yaacov, 2020), in a way that allows scenario
objects to affect the computation of the reward func-
tion by the env, as previously described.
The main connection point is AI-Gym env’s step
method, which is invoked in every iteration of the
DRL training process, and which eventually com-
putes the reward value. We altered the method so that
it communicates with the SBM core, to inform the
scenario objects of the agent’s selected action, and in
turn to receive instructions on how to modify the re-
ward value, if needed.
Recall that normally, a scenario-based model will,
in each iteration: (i) trigger an event that is requested
and not blocked; and (ii) wake up all scenario ob-
jects that requested or waited-for the triggered event,
allowing them to react by transitioning to a new
state and updating their respective declarations of re-
quested, blocked and waited-for events. This high-
level loop appears in Fig. 4. The execution terminates
once there are no enabled events, e.g., events that are
requested and not blocked.
# Main loop
while True:
if noEnabledEvents ():
terminateExecution ()
event = selectEnabledEvent ()
advanceAllBThreads ( event)
Figure 4: Pseudo code of the main execution loop in a reg-
ular scenario-based model. The execution will terminate
once there are no enabled events.
In order to support integration with AI-Gym, and
allow the scenario-based model to execute in paral-
lel to the training of the DRL agent, we modified the
execution scheme to run in super steps (Harel et al.,
2002): the SBM model runs until it has no additional
enabled events, and then, instead of terminating, it
waits for a new action event to be selected by the DRL
agent. Once such an event is triggered by the agent,
it is processed by the scenario objects (like any other
triggered event). However, if the event triggered by
the agent happens to be blocked by the scenarios, in-
formation is passed back to the AI-Gym env to pe-
nalize the agent’s reward value. The scenario objects
then carry out another super step, and the process re-
peats. Fig. 5 shows a pseudo code of the modified,
high-level loop.
# Modified main loop , with super steps
while True:
# Perform super step
while haveEnabledEvents():
event = selectEnabledEvent ()
advanceAllBThreads ( event )
# Handle an agent action
action = waitForAgentAction ()
if isBlocked ( action ):
penalizeAgentReward()
else:
keepOriginalAgentReward ()
advanceAllBThreads ( action )
Figure 5: Pseudo code of the main loop of the scenario-
based execution integrated with the DRL training. After
each super step, the model waits for an action from the
agent, and penalizes the agent if that action was blocked.
5 CASE STUDY: THE AURORA
CONGESTION CONTROLLER
As a case study, we chose to focus on the Aurora sys-
tem (Jay et al., 2019) — a DRL-based Internet con-
gestion control algorithm. The algorithm is deployed
at the sender node of a communication system, and
controls the sending rate of that node, with the goal of
optimizing the communication system’s throughput.
The selection of sending rate is based on various pa-
rameters, such as previously observed throughout, the
link’s latency, and the percent of previously lost pack-
ets. Aurora is intended to replace earlier hand-crafted
algorithms for obtaining similar goals, and was shown
to achieve excellent performance (Jay et al., 2019).
The authors of Aurora raised an interesting point
regarding its fairness, asking: Can our RL agent be
trained to “play well” with other protocols (TCP,
PCC, BBR, Copa)? (Jay et al., 2019). Indeed, in the
case of Aurora, and more generally in DRL, it is often
hard to train the agent to comply with various fairness
properties. In our case study, we set out to add spe-
cific fairness constraints to the Aurora agent, using
SBM. Specifically, we attempted to avoid the situa-
MODELSWARD 2022 - 10th International Conference on Model-Driven Engineering and Software Development
314
tion where the algorithm becomes a “bandwidth hog”
— i.e., to train it not to increase its sending rate con-
tinuously, thus providing other senders on the same
link with a fair share of the bandwidth.
5.1 Evaluation Setup
Using the BP-Py environment (Yaacov, 2020), we
created a simple scenario-based model. This model,
comprised of a single scenario, is designed to penalize
the Aurora agent for k consecutive increases in send-
ing rate. The SBM code for k = 3 appears in Fig. 6.
def S B P a v o id k in a r ow ():
k = 3
counter = 0
blockedEvList = []
waitforEvList = [BEvent ("IncreaseRate "),
BEvent ("DecreaseRate "),
BEvent ("KeepRate")]
while True:
lastEv = yield{ waitFor:waitforEvList ,
block:blockedEvList }
if lastEv != None :
if lastEv == BEvent (" DecreaseRate")
or lastEv == BEvent (" KeepRate"):
counter = 0
blockedEvList = []
else:
if counter == k − 1:
#Blocking !
blockedEvList . append (
BEvent ("IncreaseRate " ))
else:
counter += 1
Figure 6: The Python implementation of a scenario that
blocks the IncreaseRate event after k − 1 consecutive oc-
currences.
The scenario waits for three possible events that
represent the three different actions of the Aurora
agent: IncreaseRate, DecreaseRate, and KeepRate,
representing the agent’s decision to increase the send-
ing rate, decrease it or keep it steady, respectively.
Whenever the IncreaseRate event is triggered k − 1
times consecutively, the scenario will block it, until
a different action is selected by the agent. Once the
execution environment detects that a requested agent
action maps to a blocked event, it will override the re-
ward with a penalty, thus signaling to the agent that it
is not a desirable behavior.
For training the Aurora agent, we used the origi-
nal training framework provided in (Jay et al., 2019).
We compared an agent trained using the original
framework, A
O
, to an agent trained using our SBM-
enhanced framework, A
E
. All Aurora-related con-
figurable parameters were identical between the two
agents.
For computing the penalty when training A
E
, we
empirically selected the penalty function parameters
(as described by equation 1) to be α = 0, ∆ = −4.5.
These parameters allowed the agent to effectively
learn both the main goals and the additional con-
straints specified by the scenario-based model. Values
of ∆ in the range (−2, 0] proved to be too small (the
agent failed to address the SBM constraints), whereas
values in the range (−∞, −10] resulted in a disruption
to the process of the agent learning its main goals.
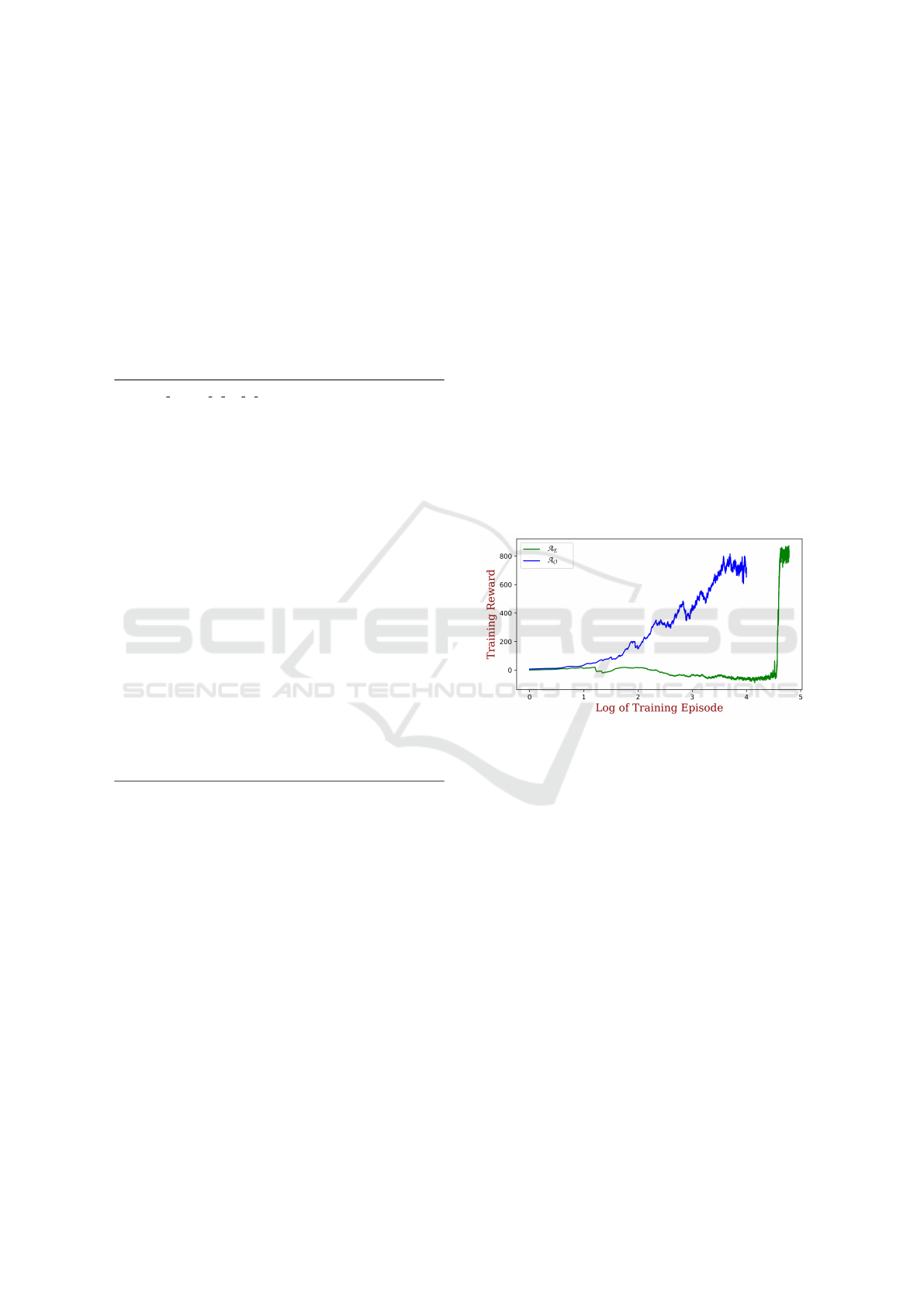
5.2 Evaluation Results
We begin by comparing the two agents employing the
evaluation metrics used by (Jay et al., 2019). Fig. 7
shows the training performance of both A
O
and A
E
as
a function of the time-step (in log scale).
Figure 7: The average training reward obtained by A
O
and
A
E
, as a function of time (log scaled).
These results reveal a significant difference in the
training times of the two agents. Specifically, it takes
A
E
significantly more epochs to learn an “adequate”
policy, i.e. to reach a similar reward level to that ob-
tained by A
O
. We observe that A
E
converges to a
good policy after about 40,000 epochs (a little after
4.5 in the logarithmic time-step scale), compared to
about 3000 epochs of A
O
(around 3.5 in the logarith-
mic time-step scale).
Next, we compare the frequency of the two agents
choosing to increase their sending rate three consec-
utive times or more (performing a “violation”). For
A
O
, the average frequency of such violations is 9%-
11%, as can be seen in Fig. 8.
In contrast, for A
E
, the average frequency of per-
forming a violation is about 0.34%, as can be seen in
Fig. 9.
Scenario-assisted Deep Reinforcement Learning
315

Figure 8: Each line shows the number of times A
O
chose to
increase the sending rate three consecutive times or more,
during the training process. Each training episode is com-
prised of 400 time steps, and the agent performed on aver-
age 35-45 violations per episode, which translates to a fre-
quency of about 9%-11%. The resulting linear regression
line is y = −0.00077701x + 39.47343569.
Figure 9: Each line shows the number of times A
E
chose to
increase the sending rate three consecutive times or more,
during the training process. This time the agent performed
only 1-2 violations on average per training episode, which
translates to a frequency of about 0.34%. The resulting lin-
ear regression line is y = −0.000012245x + 2.1856.
Summary. The results above demonstrate a highly
significant change in behavior between A
O
and A
E
when it comes to the frequency of performing a vio-
lation: whereas A
O
would perform a violation about
9-11% of the time, for A
E
this rate drops to 0.34%.
Both agents, however, achieve a similar overall re-
ward level, indicating that they both learned an ad-
equate policy with respect to the main goal’s of the
system. While the enhanced agent took longer to con-
verge to this policy (as it had to learn additional con-
straints), these results showcase the feasibility and po-
tential of our approach.
6 RELATED WORK
Several approaches have been proposed in recent
years for using hand-crafted software components to
enhance the run-time functionality and performance
of DNNs, or to improve their training process. One
notable family of approaches calls for composing
DNNs and hand-crafted components. See for exam-
ple (Shalev-Shwartz et al., 2017) where the decisions
of an autonomous driving systems can be overridden
by rules. This composition can be parallel, where a
DNN and hand-crafted code run side by side, each
handling different tasks; sequential, where a DNN’s
output feeds as input into hand-crafted code, or vice-
versa; or ensemble-based, where DNNs and hand-
crafted code attempt to solve the same problem and
agree on an output.
Another notable family of approaches contains
those that are reflection-based, where both hand-
crafted code and DNN gradually adjust themselves
according to their past performance (Kang et al.,
2017; Milan et al., 2017; Ray and Chakrabarti, 2020).
The approach we propose here can be viewed as
a bridge between composition-based and reflection-
based approaches: a hand-crafted model is run along-
side a DRL agent, with the purpose of improving the
latter’s training process.
Prior work has explored the potential synergies
between SBM and DRL. In one attempt, Elyasaf et
al. (Elyasaf et al., 2019) used DRL to fine-tune the ex-
ecution strategy of an existing scenario-based model.
Using a game of RoboSoccer as a case-study, they
demonstrated how the DRL agent could learn to guide
a scenario-based player to more effectively grab the
soccer ball. In a separate attempt, Katz (Katz, 2020;
Katz, 2021a) focused on using SBM models to guard
an existing DRL agent — that is, to override decisions
made by the DRL agent that violate the scenario-
based model. The technique that we propose here
is different from and complementary to both of these
approaches: instead of using DRL to guide a hand-
crafted model or using SBM to guard an existing DRL
agent, we propose to use SBM to improve the DRL
agent, a-priori, so that it better abides by a scenario-
based specification.
7 CONCLUSION AND FUTURE
WORK
Deep reinforcement learning is an excellent tool for
addressing many real-world problems; but it is lack-
ing, in the sense that it does not naturally lend itself
to the integration of expert knowledge. Through our
proposed approach, we seek to bridge this gap, and
allow the integration of classical modeling techniques
into the DRL training loop. The resulting agents, as
we have demonstrated, are more likely to adhere to
the policies, goals and restrictions defined by the do-
main experts. Apart from improving performance,
this approach increases the transparency and explain-
MODELSWARD 2022 - 10th International Conference on Model-Driven Engineering and Software Development
316

ability of DRL agents, and can be regarded as docu-
menting and explaining these agents’ behavior.
Turning to the future, we intend to apply the tech-
nique to more complex case-studies, involving more
intricate agents and more elaborate scenario-based
specifications — and use them to also study the scal-
ability of the approach. Another angle we intend to
pursue is to enhance the DRL-SBM interface, either
by changing the SBM semantics or by defining an
event-based protocol so that it can allow manipulat-
ing the agent’s reward function in more subtle ways.
Thus, the SBM feedback will be able to distinguish
actions that are slightly undesirable from those that
are extremely undesirable. We also intend to explore
adding constructs for encouraging an agent to take de-
sirable actions, in addition to penalizing it for taking
undesirable ones. As discussed earlier, we are also in-
terested in exploring generalizable criteria for choos-
ing penalty values that will be conducive to learning
the desired properties, while preserving the overall
learning of the task at hand.
Another angle for future research is to measure
additional effects that scenario-assisted training may
have on DRL, such as accelerating the learning of
properties that could, in principle, be learned with-
out such assistance. It is also interesting to see on
a variety of case studies if SBM-specified expert ad-
vice that is aimed at improving system performance
(as opposed to complying with new requirements) in-
deed accomplishes such improvement over what the
system could learn on its own.
ACKNOWLEDGEMENTS
The work of R. Yerushalmi, G. Amir, A. Elyasaf and
G. Katz was partially supported by a grant from the Is-
raeli Smart Transportation Research Center (ISTRC).
The work of D. Harel, A. Marron and R. Yerushalmi
was partially supported by a research grant from the
Estate of Ursula Levy, the Midwest Electron Micro-
scope Project, Dr. Elias and Esta Schwartz Instru-
mentation Fund in Memory of Uri and Atida Litauer,
and the Crown Family Philanthropies.
REFERENCES
Alexandron, G., Armoni, M., Gordon, M., and Harel, D.
(2014). Scenario-Based Programming: Reducing the
Cognitive Load, Fostering Abstract Thinking. In Proc
36th Int. Conf. on Software Engineering (ICSE), pages
311–320.
Brockman, G., Cheung, V., Pettersson, L., Schneider, J.,
Schulman, J., Tang, J., and Zaremba, W. (2016).
OpenAI Gym. Technical Report. http://arxiv.org/abs/
1606.01540.
Damm, W. and Harel, D. (2001). LSCs: Breathing Life
into Message Sequence Charts. Journal on Formal
Methods in System Design (FMSD), 19(1):45–80.
Eliyahu, T., Kazak, Y., Katz, G., and Schapira, M. (2021).
Verifying Learning-Augmented Systems. In Proc.
Conf. of the ACM Special Interest Group on Data
Communication on the Applications, Technologies,
Architectures, and Protocols for Computer Commu-
nication (SIGCOMM), pages 305–318.
Elyasaf, A. (2021). Context-Oriented Behavioral Program-
ming. Information and Software Technology, 133.
Elyasaf, A., Sadon, A., Weiss, G., and Yaacov, T. (2019).
Using Behavioural Programming with Solver, Con-
text, and Deep Reinforcement Learning for Playing
a Simplified RoboCup-Type Game. In Proc. 22nd
ACM/IEEE Int. Conf. on Model Driven Engineering
Languages and Systems Companion (MODELS-C),
pages 243–251.
Goodfellow, I., Bengio, Y., and Courville, A. (2016). Deep
Learning. MIT Press.
Gordon, M., Marron, A., and Meerbaum-Salant, O. (2012).
Spaghetti for the Main Course? Observations on
the Naturalness of Scenario-Based Programming. In
Proc. 17th ACM Annual Conf. on Innovation and
Technology in Computer Science Education (ITCSE),
pages 198–203.
Greenyer, J., Gritzner, D., Katz, G., and Marron, A.
(2016a). Scenario-Based Modeling and Synthesis for
Reactive Systems with Dynamic System Structure in
ScenarioTools. In Proc. 19th ACM/IEEE Int. Conf.
on Model Driven Engineering Languages and Systems
(MODELS), pages 16–23.
Greenyer, J., Gritzner, D., Katz, G., Marron, A., Glade,
N., Gutjahr, T., and K
¨
onig, F. (2016b). Distributed
Execution of Scenario-Based Specifications of Struc-
turally Dynamic Cyber-Physical Systems. In Proc.
3rd Int. Conf. on System-Integrated Intelligence: New
Challenges for Product and Production Engineering
(SYSINT), pages 552–559.
Harel, D., Kantor, A., and Katz, G. (2013a). Relaxing Syn-
chronization Constraints in Behavioral Programs. In
Proc. 19th Int. Conf. on Logic for Programming, Arti-
ficial Intelligence and Reasoning (LPAR), pages 355–
372.
Harel, D., Kantor, A., Katz, G., Marron, A., Mizrahi, L.,
and Weiss, G. (2013b). On Composing and Proving
the Correctness of Reactive Behavior. In Proc. 13th
Int. Conf. on Embedded Software (EMSOFT), pages
1–10.
Harel, D., Kantor, A., Katz, G., Marron, A., Weiss, G., and
Wiener, G. (2015a). Towards Behavioral Program-
ming in Distributed Architectures. Journal of Science
of Computer Programming (J. SCP), 98:233–267.
Harel, D. and Katz, G. (2014). Scaling-Up Behavioral Pro-
gramming: Steps from Basic Principles to Applica-
tion Architectures. In Proc. 4th SPLASH Workshop
on Programming based on Actors, Agents and Decen-
tralized Control (AGERE!), pages 95–108.
Scenario-assisted Deep Reinforcement Learning
317

Harel, D., Katz, G., Lampert, R., Marron, A., and Weiss, G.
(2015b). On the Succinctness of Idioms for Concur-
rent Programming. In Proc. 26th Int. Conf. on Con-
currency Theory (CONCUR), pages 85–99.
Harel, D., Katz, G., Marelly, R., and Marron, A. (2016a).
An Initial Wise Development Environment for Behav-
ioral Models. In Proc. 4th Int. Conf. on Model-Driven
Engineering and Software Development (MODEL-
SWARD), pages 600–612.
Harel, D., Katz, G., Marelly, R., and Marron, A. (2016b).
First Steps Towards a Wise Development Environ-
ment for Behavioral Models. Int. Journal of Informa-
tion System Modeling and Design (IJISMD), 7(3):1–
22.
Harel, D., Katz, G., Marelly, R., and Marron, A. (2018).
Wise Computing: Toward Endowing System Devel-
opment with Proactive Wisdom. IEEE Computer,
51(2):14–26.
Harel, D., Katz, G., Marron, A., Sadon, A., and Weiss, G.
(2020). Executing Scenario-Based Specification with
Dynamic Generation of Rich Events. Communica-
tions in Computer and Information Science (CCIS),
1161.
Harel, D., Katz, G., Marron, A., and Weiss, G. (2012a).
Non-Intrusive Repair of Reactive Programs. In Proc.
17th IEEE Int. Conf. on Engineering of Complex Com-
puter Systems (ICECCS), pages 3–12.
Harel, D., Katz, G., Marron, A., and Weiss, G. (2014). Non-
Intrusive Repair of Safety and Liveness Violations in
Reactive Programs. Transactions on Computational
Collective Intelligence (TCCI), 16:1–33.
Harel, D., Katz, G., Marron, A., and Weiss, G. (2015c). The
Effect of Concurrent Programming Idioms on Veri-
fication. In Proc. 3rd Int. Conf. on Model-Driven
Engineering and Software Development (MODEL-
SWARD), pages 363–369.
Harel, D., Kugler, H., Marelly, R., and Pnueli, A. (2002).
Smart Play-Out of Behavioral Requirements. In Proc.
4th Int. Conf. on Formal Methods in Computer-Aided
Design (FMCAD), pages 378–398.
Harel, D., Kugler, H., and Weiss, G. (2005). Some Method-
ological Observations resulting from Experience us-
ing LSCs and the Play-In/Play-Out Approach. In Sce-
narios: Models, Transformations and Tools, pages
26–42. Springer.
Harel, D., Lampert, R., Marron, A., and Weiss, G. (2011).
Model-checking behavioral programs. In Proc. 9th
ACM Int. Conf. on Embedded Software (EMSOFT),
pages 279–288.
Harel, D. and Marelly, R. (2003). Come, Let’s Play:
Scenario-Based Programming using LSCs and the
Play-Engine, volume 1. Springer Science & Business
Media.
Harel, D., Marron, A., and Weiss, G. (2012b). Behavioral
Programming. Communications of the ACM (CACM),
55(7):90–100.
Jay, N., Rotman, N., Godfrey, B., Schapira, M., and Tamar,
A. (2019). A Deep Reinforcement Learning Perspec-
tive on Internet Congestion Control. In Proc. 36th
Int. Conf. on Machine Learning (ICML), pages 3050–
3059.
Kang, C., Kim, G., and Yoo, S.-I. (2017). Detection and
Recognition of Text Embedded in Online Images via
Neural Context Models. In Proc. 31st AAAI Conf. on
Artificial Intelligence (AAAI).
Katz, G. (2013). On Module-Based Abstraction and Re-
pair of Behavioral Programs. In Proc. 19th Int. Conf.
on Logic for Programming, Artificial Intelligence and
Reasoning (LPAR), pages 518–535.
Katz, G. (2020). Guarded Deep Learning using Scenario-
Based Modeling. In Proc. 8th Int. Conf. on
Model-Driven Engineering and Software Develop-
ment (MODELSWARD), pages 126–136.
Katz, G. (2021a). Augmenting Deep Neural Networks
with Scenario-Based Guard Rules. Communica-
tions in Computer and Information Science (CCIS),
1361:147–172.
Katz, G. (2021b). Towards Repairing Scenario-Based
Models with Rich Events. In Proc. 9th Int. Conf.
on Model-Driven Engineering and Software Develop-
ment (MODELSWARD), pages 362–372.
Katz, G., Barrett, C., and Harel, D. (2015). Theory-Aided
Model Checking of Concurrent Transition Systems. In
Proc. 15th Int. Conf. on Formal Methods in Computer-
Aided Design (FMCAD), pages 81–88.
Katz, G. and Elyasaf, A. (2021). Towards Combining Deep
Learning, Verification, and Scenario-Based Program-
ming. In Proc. 1st Workshop on Verification of Au-
tonomous and Robotic Systems (VARS), pages 1–3.
Katz, G., Marron, A., Sadon, A., and Weiss, G. (2019).
On-the-Fly Construction of Composite Events in
Scenario-Based Modeling Using Constraint Solvers.
In Proc. 7th Int. Conf. on Model-Driven Engineering
and Software Development (MODELSWARD), pages
143–156.
Kazak, Y., Barrett, C., Katz, G., and Schapira, M. (2019).
Verifying Deep-RL-Driven Systems. In Proc. 1st
ACM SIGCOMM Workshop on Network Meets AI &
ML (NetAI), pages 83–89.
Kiran, B., Sobh, I., Talpaert, V., Mannion, P., Sallab, A.,
Yogamani, S., and Perez, P. (2021). Deep Reinforce-
ment Learning for Autonomous Driving: A Survey.
IEEE Transactions on Intelligent Transportation Sys-
tems, pages 1–18.
Kugler, H., Marelly, R., Appleby, L., Fisher, J., Pnueli, A.,
Harel, D., Stern, M., Hubbard, J., et al. (2008). A
Scenario-Based Approach to Modeling Development:
A Prototype Model of C. Elegans Vulval Fate Specifi-
cation. Developmental biology, 323(1):1–5.
Li, J., Pang, D., Zheng, Y., Guan, X., and Le, X. (2022). A
Flexible Manufacturing Assembly System with Deep
Reinforcement Learning. Control Engineering Prac-
tice, 118.
Marron, A., Arnon, B., Elyasaf, A., Gordon, M.,
Katz, G., Lapid, H., Marelly, R., Sherman, D.,
Szekely, S., Weiss, G., and Harel, D. (2016). Six
(Im)possible Things before Breakfast: Building-
Blocks and Design-Principles for Wise Computing. In
MODELSWARD 2022 - 10th International Conference on Model-Driven Engineering and Software Development
318

Proc. 19th ACM/IEEE Int. Conf. on Model Driven En-
gineering Languages and Systems (MODELS), pages
94–100.
Milan, A., Rezatofighi, H., Dick, A., Reid, I., and Schindler,
K. (2017). Online Multi-Target Tracking using Recur-
rent Neural Networks. In Proc. 31st AAAI Conf. on
Artificial Intelligence (AAAI).
Mohamad Suhaili, S., Salim, N., and Jambli, M. (2021).
Service Chatbots: A Systematic Review. Expert Sys-
tems with Applications, 184:115461.
Ng, A., Harada, D., and Russell, S. (1999). Policy Invari-
ance Under Reward Transformations: Theory and Ap-
plication to Reward Shaping. In Proc. 16th Int. Conf.
on Machine Learning (ICML), pages 278–287.
Ray, P. and Chakrabarti, A. (2020). A Mixed Approach
of Deep Learning Method and Rule-Based Method to
Improve Aspect Level Sentiment Analysis. Applied
Computing and Informatics.
Ribeiro, M., Singh, S., and Guestrin, C. (2016). Why
Should I Trust You?: Explaining the Predictions of
any Classifier. In Proc. 22nd ACM SIGKDD Int. Conf.
on Knowledge Discovery and Data Mining, pages
1135–1144.
Samek, W., Wiegand, T., and M
¨
uller, K. (2018). Explain-
able Artificial Intelligence: Understanding, Visual-
izing and Interpreting Deep Learning Models. ITU
Journal: The Impact of Artificial Intelligence (AI) on
Communication Networks and Services, 1(1):39–48.
Shalev-Shwartz, S., Shammah, S., and Shashua, A. (2017).
On a Formal Model of Safe and Scalable Self-Driving
Cars. Technical Report. http://arxiv.org/abs/1708.
06374.
Steinberg, S., Greenyer, J., Gritzner, D., Harel, D., Katz,
G., and Marron, A. (2017). Distributing Scenario-
Based Models: A Replicate-and-Project Approach. In
Proc. 5th Int. Conf. on Model-Driven Engineering and
Software Development (MODELSWARD), pages 182–
195.
Steinberg, S., Greenyer, J., Gritzner, D., Harel, D., Katz,
G., and Marron, A. (2018). Efficient Distributed Exe-
cution of Multi-Component Scenario-Based Models.
Communications in Computer and Information Sci-
ence (CCIS), 880:449–483.
Sutton, R. and Barto, A. (2018). Introduction to Reinforce-
ment Learning. MIT press Cambridge.
Szegedy, C., Zaremba, W., Sutskever, I., Bruna, J., Erhan,
D., Goodfellow, I., and Fergus, R. (2013). Intrigu-
ing Properties of Neural Networks. Technical Report.
http://arxiv.org/abs/1312.6199.
Xia, Z., Xue, S., Wu, J., Chen, Y., Chen, J., and Wu, L.
(2021). Deep Reinforcement Learning for Smart City
Communication Networks. IEEE Transactions on In-
dustrial Informatics, 17(6):4188–4196.
Yaacov, T. (2020). BPPy: Behavioral Programming in
Python. https://github.com/bThink-BGU/BPPy.
Ye, D., Liu, Z., Sun, M., Shi, B., Zhao, P., Wu, H., Yu, H.,
Yang, S., Wu, X., Guo, Q., Chen, Q., Yin, Y., Zhang,
H., Shi, T., Wang, L., Fu, Q., Yang, W., and Huang, L.
(2020). Mastering Complex Control in MOBA Games
with Deep Reinforcement Learning. In Proc. 34th
AAAI Conf. on Artificial Intelligence (AAAI), pages
6672–6679.
Zou, H., Ren, T., Yan, D., Su, H., and Zhu, J. (2019). Re-
ward Shaping via Meta-Learning. Technical Report.
http://arxiv.org/abs/1901.09330.
Scenario-assisted Deep Reinforcement Learning
319
