
Towards a Lightweight Model-driven Smart-city Digital Twin
Jean-S
´
ebastien Sottet, Pierre Brimont, Christophe Feltus, Benjamin Gateau and Jean-Francois Merche
Luxembourg Institute of Science and Technology (LIST), 5 Avenue des Hauts Fourneaux, Esch-Alzette, Luxembourg
Keywords:
Digital Twin, System Model Prototype, Executable Models, Flexible Modelling.
Abstract:
In this article we consider the use of digital twin for representing open physical system, notably smart-cities.
In this context everything is not necessarily defined or sensed; as a result a pure data-driven approach is not
possible and should be completed by expert knowledge, hence through models. We propose an approach to
design a model-driven digital twins MDDT that supports this context. It allows to 1/ quickly prototype digital
twins, 2/ integrate various information from different kind of sources (diverse expertise, data, etc.) 3/ support
evolution and enhancement all along the system’s life-cycle.
1 INTRODUCTION
Amongst the many existing definitions of Digital twin
(Barricelli et al., 2019) (DT) we propose to adopt this
one: digital twin is “a digital replica of a physical sys-
tem”. The DT should behave similarly to the physical
system if a similar event occurs to it. Conversely, ac-
tion on the DT could have an impact on the physical
system if it is designed as such
1
.
Existing commercial approaches are proposing
data-based DT and are focusing on data collection,
for instance the generic platform Microsoft Azur
DT
2
. Mainly dedicated to smart-city cases, it focuses
on heterogeneous data collection and harmonization
through a standardized single data model. Some ini-
tiatives try to add semantic (Singh et al., 2020) and ad-
ditional information to the initial pure data-based DT.
The current approaches mainly focuses on building
DT from data obtained from the physical system only.
As a result they are heavy weight and relying on com-
plex infrastructure for data collection (e.g., Fiware
3
)
and advances Machine Learning (ML) (Chakraborty
and Adhikari, 2021) plus Data Analytics to build a
digital twin; additional technologies are to be used to
complete the view, like large 3D representations (see
Unreal Engine for 3D digital twins
4
). However this
view may remain only partial as all the knowledge
1
In smart-city cases the automated loop back from digi-
tal twin to the physical system is not always possible
2
https://azure.microsoft.com/en-us/services/digital-
twins/
3
https://www.fiware.org/
4
https://www.unrealengine.com/en-US/digital-twins
about the physical system is not necessarily available
through data/sensors.
From our perspective, we think that digital twins
are rather hybrid entities (alike ideas expressed in
(Lektauers et al., 2021)) composed by either human
knowledge (technical blue prints, equations, etc.) or
data information and machine inferred models, all
being part of the definition of Model-driven Digital
Twin (MDDT). The need of having more than only
data-based approaches for digital twins construction
is emphasized when twining beyond the classical in-
dustrial use-case (Raj and Surianarayanan, 2020) sys-
tems :
• which are more open like Smart Cities (Ketzler
et al., 2020),
• which include a lot of assumptions of their bor-
ders (and behavior) with other systems,
• with part of the information which cannot be
given by data collection (e.g., no sensors for this
kind of data).
This is where models, as human construction for rep-
resenting the reality, come into play.
Moreover, under this open system assumption, an
approach would be to build incrementally a DT re-
lying on model-driven engineering. In this approach
we take an excerpt or a specific aspect of the phys-
ical system and first build a partial MDDT
5
. Then
we extend it all along the discovery of the system
facets, whilst improving the twin with the physical
5
Other definition of partial digital twin can be given like
digital shadow or digital models as partial construction of
the reality or abstraction of the reality (Ladj et al., 2021)
320
Sottet, J., Brimont, P., Feltus, C., Gateau, B. and Merche, J.
Towards a Lightweight Model-driven Smart-city Digital Twin.
DOI: 10.5220/0010906100003119
In Proceedings of the 10th International Conference on Model-Driven Engineering and Software Development (MODELSWARD 2022), pages 320-327
ISBN: 978-989-758-550-0; ISSN: 2184-4348
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

system feedback (e.g., data). The excerpt can be a
complex sub-system, like the electricity consumption
of a quarter of a given city. It acts as a lens, helping to
start with a concrete aspect of the physical system; it
can be for instance later extended with the local elec-
trical production of the quarter allowing to gradually
build a more complete MDDT. This extension can be
realised by combining different MDDT coming from
other perspectives, thus calling for a federation of DT,
close to the initial vision followed by Cambridge Uni-
versity’s Center for the Digital Built Britain
6
. In this
article, we promote the use of lightweight modeling
support that would ease the development of such dig-
ital twins. Under such modelling support, parts of
the model should also be easily replaced or extended
when a more precise element is available: e.g., a re-
finement of the system behavior by analyzing actual
data.
This paper is organised as follow: we first con-
front the MDE approach used with traditional Data
Driven solutions to identify specific requirements for
a lightweight Model processing platform, calibrated
for smart-city open worlds. Then we expose those
requirements through our approach to design a flexi-
ble MDDT, applied to a proof of concept in the con-
text of smart city, and through snapshots of the cur-
rently developing prototype. We notably highlight
the static and dynamic (action language) modelling
aspects and, more importantly, the life-cycle of a
MDDT, following the refinement on its relations to
physical system: reducing the modeling gap.
2 THE REQUIREMENTS FOR
OPEN MODEL-DRIVEN
DIGITAL TWIN
As exposed in the introduction, we focus on open-
world digital twins, with potentially few sensors
and/or with a lot of human interventions. This is
typically the context of a smart-city; where some of
the information have been first designed (e.g., build-
ing information models) and where the knowledge
evolves during its life-cycle. We set the requirements
of a MDDT with the following capabilities:
• Simulation Capabilities: evaluate and store re-
silience of the physical system when extreme con-
ditions occur.
• Monitoring Capabilities: direct connection to
the physical twin: MDDT should be a mirror of
what happens in the reality.
6
https://www.cdbb.cam.ac.uk/
• Alignment Capabilities: learn from the physical
system in order to be updated and to better fit with
reality: coping with twin-physical system gap.
2.1 Need for Rapid Prototyping Digital
Twins
Digital twin supporting systems can be complex like
the one described in (Kaur et al., 2020): it encom-
passes a lot of domains and technologies like internet
of things, edge and cloud computing architectures, ar-
tificial intelligence, machine learning, big data analy-
sis, etc. However, for some specific situations, such a
complex architecture is not always desirable, notably
under the following circumstances:
• When considering a new domain, or at the early
phases of designing a digital twin, it may be nec-
essary to cope with very few data and complete
it with models. In addition, even with a partial
MDDT we should be able to validate the hypoth-
esis we made in it.
• Within an existing digital twin, some aspects are
not connected to sensors: They are done by hu-
man or not yet taken in account because of their
novelty. Thus, no pre-existing and complete
model of this physical part can be defined. Con-
sequently, it requires to rapidly design an approx-
imate but realistic model (according to human
knowledge) in order to avoid blind spots when
twining the system (for e.g., simulation or predic-
tion purpose).
• the digital twin is also used as a simulation envi-
ronment where it is important to be able to quickly
test specific up to extreme scenario and proto-
type innovative ideas for the physical system (e.g.,
”what-if” scenario).
• Finally, we may have to deal with different digi-
tal twins, each completing the other and acting in
a federated way; So we need to take into account
that some are still missing in the twins constella-
tion.
As a result, it is necessary to be able to quickly sketch
models and model manipulations (e.g., model trans-
formation, model processing) to build those digital
twins from a human knowledge. It is also essential to
have flexibility to discover the data and information
coming from the physical system. Finally, it is also
requisite to ensure interoperability with other twins
at the border of the considered one like e.g., (Grace
et al., 2016).
Towards a Lightweight Model-driven Smart-city Digital Twin
321

2.2 Need for Supporting Evolution and
Flexibility
As stated in (Bordeleau et al., 2020), there is a
strong need to interconnect models when dealing with
MDDT. It is also necessary to interconnect those
models with the physical system sensors and even
sometimes to discover the sensors themselves (value,
semantic). Thus, we should rely on a flexible model-
ing framework, enough permissive to relax modelling
language constraints (Salay and Chechik, 2013) to al-
low those interconnections. Moreover, as their physi-
cal counter parts evolve, the underlying models of the
MDTT should also be able to evolve easily. The mod-
els remains open to new event, sensors, modification,
alteration of the physical system.
We should also take into account, as any designed
model, that the MDDT may be at a certain point of
time of its lifecycle, partially defined with potentially
uncertainty. This uncertainty is part of the process
of building a twin that mimics more effectively the
reality.
Finally, we consider that, beyond data, the MDDT
content is provided by different human profiles: dif-
ferent kind of users, different domain experts, etc.
This is where flexibility also comes into play when
capturing, as models, the knowledge provided by
the experts. Notably, this flexibility is part of natu-
ral modelling approach (Zarwin et al., 2014) and is
important to ease the capture of expert knowledge
through models from a wide range of expertise do-
mains.
2.3 Need for Executable Model and
Action Languages
Some of the models composing a digital twin are
by essence executable (e.g., machine learning mod-
els, scientific models), others are more static repre-
sentation of the system, like UML models, or in-
cludes static representation of the dynamic, like state-
charts. Defining behavior of the models part is crucial
notably for supporting our prototyping approach of
MDDT. Typically model execution is ensured through
scripting (Peltonen and Selonen, 2001), generic ac-
tion languages (e.g., AlF, FUML (Guermazi et al.,
2015), xUMl,Scrall
7
etc.), business rules or through
domain-specific action language (Mayerhofer et al.,
2013).
In order to exploit the MDDT we should be able
to execute it for:
7
https://github.com/modelint/scrall
• replaying past scenario and thus test and validate
MDDT prototype,
• make simulation to see the physical system re-
silience,
• align itself with actual physical system state (as
for monitoring goal).
Finally, to provide a coherent context and allow for
continuity of execution (notably supporting the evo-
lution), we should relate the executable part (i.e., dy-
namic) with their static counter-parts modeling ele-
ment and we also need to provide backup solutions to
the execution. For instance, an approximation func-
tion of required value for the execution is one of the
possible backup solutions when some of the model
elements are suppressed.
2.4 Need for Considering Data as Model
When we try to make sense of the data, i.e., not to
consider the data as simple binary values, we already
consider the data as an element of the model. To sup-
port this claim, we get inspired by (B
´
ezivin, 2004):
the execution of a given program is also considered
as a model (in the MDE definition) if it is conform to
a metamodel. By extension, we can say that the data
handled by this program is also a model (since we can
express a metamodel to which it conforms to). This
idea finds also an echo in the field of the semantic web
with the concept of sensor linked data (Patni et al.,
2010). In addition, when dealing with data and sen-
sors, it is important to consider the evolution through
time (beyond discrete modelling) as the approach de-
scribed in (Moawad et al., 2015).
Some current infrastructures or platforms for digi-
tal twining (e.g., Microsoft Azur DT) are already pro-
viding means to structure and gather IoT data from an
interoperable way (Conde et al., 2021). Furthermore,
like in Fiware, raw data is enhanced with meta-data to
be exchanged by applications, modules, and services
through a central ”context broker”. It is reasonable
to think, by interfacing with such infrastructure, that
a sensor producing data should have a metamodel,
which allows for a seamless integration of the data
into a MDDT. Under a simulation perspective, the
data produced by the MDDT will turn to be directly
expressed in the right metamodel (or data schema) al-
lowing the expert a better understanding of what hap-
pened (in the simulation) as it is also expressed in the
same format as real data. It can then help experts to
compare and assess design alternative in the reality by
simulation on the twin.
MODELSWARD 2022 - 10th International Conference on Model-Driven Engineering and Software Development
322
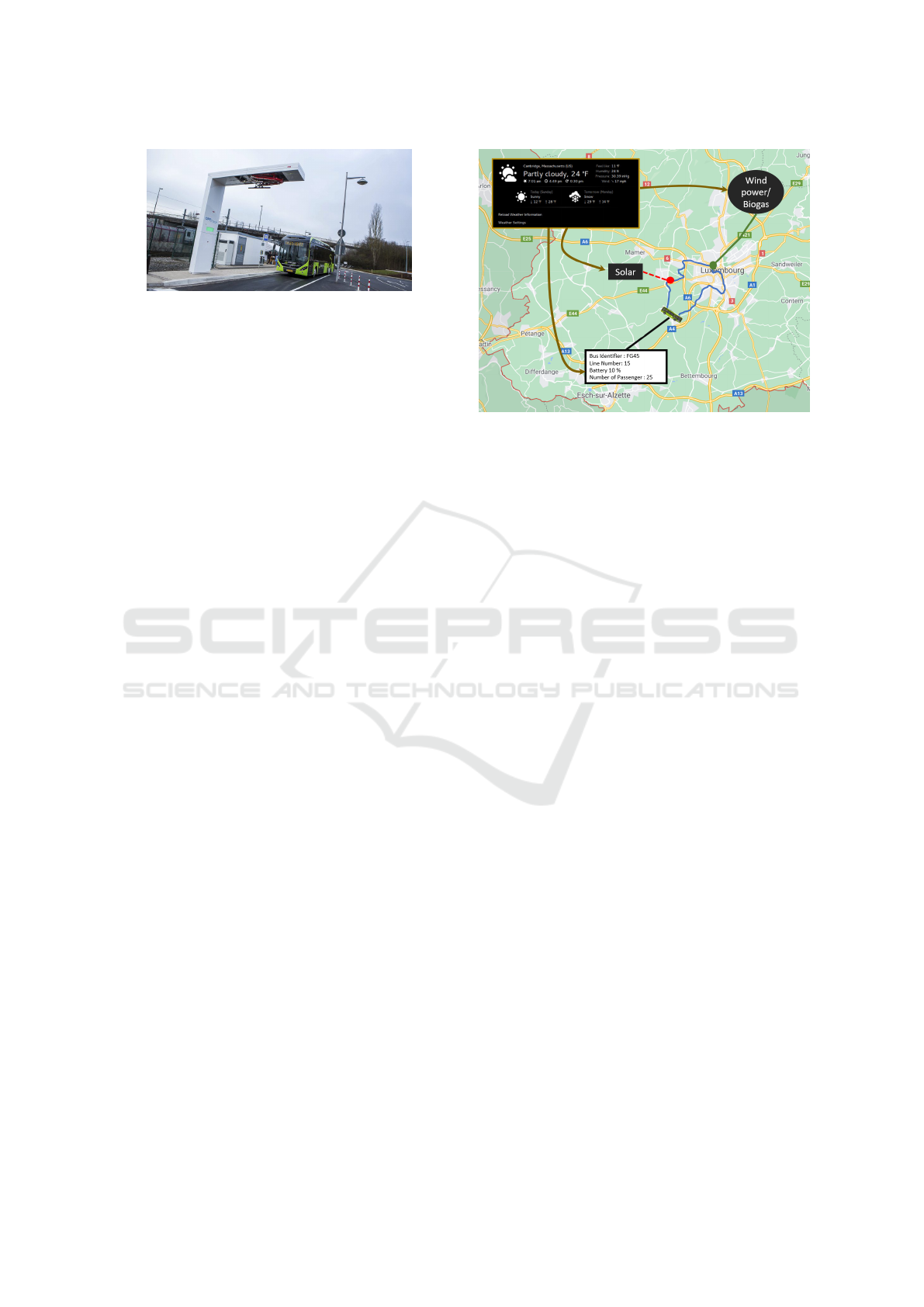
Figure 1: Current experimental reloading bus station.
3 MODEL DRIVEN DIGITAL
TWIN IN ACTION
As we have shown in the requirements section (see
Section 2), it is necessary to have a modelling in-
frastructure that has the following functionalities: 1/
sketch easily a first MDDT either on its static parts
(the models) or dynamic parts (actions) involving ex-
pert knowledge;// 2/ easily test and validate (e.g., us-
ing a scripting-like approach) the different models of
knowledge available on a digital twin;// 3/ align this
first MDDT with the physical system coping with re-
ality gap and potential evolution of the physical sys-
tem properties;// 4/ make this MDDT flexible enough
to connect to the physical system and other potential
twins.// In the following of this section we will ad-
dress the functionalities 1, and partially 2 and 3. The
fourth one is out of the scope of this position paper.
3.1 Case Study
Our case study addresses to electric public transporta-
tion. This is a first step into a smart-city-wise prob-
lem that can be extended to all the electricity produc-
tion, traffic management, etc. Thus, we focus on an
electric bus line which aims at optimising its electric-
ity consumption and still offering a good quality of
service. The electricity can be reloaded during the
bus tour at local reloading stations see Figure 1. The
buses should try to keep-up with their schedule with
regards to e.g., potential work, traffic jam, meteoro-
logical conditions, while avoiding emptying their bat-
teries and getting stuck.
In this case-study, a DT should be used to assess
the resilience of such full electric buses on a given
pathway simulating potential traffic jam, works and
drastic change in weather conditions. It can also an-
swer about the best stop to reload using only green
energy, thus depending on weather condition and lo-
cal energy consumption. Finally it can help in assess-
ing if new bus stops or alternative tracks still remain
compliant with the service quality requirements.
Figure 2: Electro-mobility with hybrid bus scenario includ-
ing weather forecast, green electricity production.
3.2 Designing a First MDDT
During our prototyping phase of MDDT, we consider
a first abstraction of the physical system, i.e., the bus
electro-mobility case. So, we first design a digital
model (among others) that serves as a basis of the
MDDT and that as the ability to evolve as data col-
lection and knowledge about the system progress. In
this first step, several sources of information are to be
taken into account:
1. we know (from the bus company experts) the bus
stops, reloading stations and routes.
2. we know from past data and/or the expert knowl-
edge, the potential impact on electricity consump-
tion on each route portion (e.g., high climbing
percentage, dedicated bus portion) between two
stops.
3. we know, from the company designing the bus,
an average consumption of the bus according to
its load (passengers), and the weather (tempera-
tures).
4. we can extrapolate based on expert feedback the
impact of works, traffic jams, etc. on each route
portion.
Within this context, we propose to use JSMF (Sottet
and Biri, 2016), a JavaScript-based modeling frame-
work, that aims at being flexible and make model-
based application prototyping easy. In its current
implementation JSMF partially supports the identi-
fied requirements on Section 2. We aims to rely on
this modeling language to describe the static part of
the model and we illustrate the dynamic part with
JavaScript functions that manipulates JSMF Models.
Those JSMF models are processed by elaborated spe-
cific languages on top of JavaScript.
Towards a Lightweight Model-driven Smart-city Digital Twin
323

Figure 3: Visual of bus route modelling, including event
like work or traffic jam, reloading stations are special kind
of bus stop.
3.2.1 Static Information
JSMF can be directly used to represent elements 1
and 2 of the previous enumeration: they can be repre-
sented as a graph (see Figure 3) of routes (the edges)
connecting the stops (the nodes). On each route
the impact on the consumption is an attribute factor.
Reloading stations are subclass of bus stops. We first
establish a JSMF metamodel to support the definition
of the buses and the pathway graph. The JSMF allows
to define a metamodel in multiple (sub)modules and
combines them together in a seamless way.
The bus is defined in Listing 1 as follow: a bus has
an identifier, a line number, a battery level (from 0 to
100) and a number of passengers.
1 v ar Bus = Cl ass . n ew In st a nc e ( ’ Bus ’)
2 B us . s et A t t ri b u t e ( ’ i d en ti fi e r ’ , Str in g
)
3 B us . s et A t t ri b u t e ( ’ l i ne Nu mb e r ’ , Num be r
)
4 B us . s et A t t ri b u t e ( ’ b a tt e ry Le v el ’ , JS M F
. R ang e (0 , 100) ) // Bat te ri e from 0
to 100
5 B us . s et A t t ri b u t e ( ’ p a ss en ge r s ’ , Num be r
)
Listing 1: Bus metamodel definition.
The metamodel for the stops and routes that forms
a graph is defined in Listing 2. A Stop is defined
by its name and its geographical coordinates (latitude
and longitude). The Route class joins the stops using
the fromStop and toStop relations. In this case study
we only focus on a given line pathway: alternative
route will necessary modify the original routing. The
consumption attribute, defines the consumption factor
to be applied to the given route according to expert
knowledge with regards to slope and length.
Figure 4: Map User Interface on top of JSMF.
1 v ar Stop = Cl ass . ne wI n st an c e ( ’ Stop ’ )
2 Stop . se tA t t r ib u t e ( ’ n ame ’ , St rin g )
3 Stop . se tA t t r ib u t e ( ’ lat it ud e ’ , St ri n g )
4 Stop . se tA t t r ib u t e ( ’ lo n g it ud e ’ , St r in g
)
5
6 v ar Route = Class . ne wI n st an c e ( ’ Rou te ’
)
7 Rou te . se t A tt r i b ut e ( ’ co n s um pt i on ’ ,
Num be r )
8 Rou te . se t R ef e r e nc e ( ’ t oS to p ’, Stop , 1,
’ f ro mR ou te ’)
9 Rou te . se t R ef e r e nc e ( ’ fro mS to p ’ , Stop ,
1, ’ toR ou te ’ )
10
11 v ar Rel oa de r = C las s . n e wI ns t a n ce ( ’
Re lo ad er ’ )
12 Re lo ad er . su p er Cl a ss es = [ Rou te ]
Listing 2: Stops and route definition.
Then, in order to actually represent (and abstract)
the physical system, a model conforms to this meta-
model has to be instantiated. Here, multiple experts
can come into play. For a better user experience with
the model it is crucial to propose a simple yet efficient
user interface on top of the JSMF model. In smart-
city systems, a geographical representation (poten-
tially including building in 3D) is the best way to
interact with domain experts. It is easy to interface
technologies like leaflet
8
and mapbox
9
with JSMF.
Through this interface (see Figure 4) the city bus
responsible defines the bus stops (position, naming)
as well as the actual routes between two stops. On
top of each route, a consumption factor should be set.
In the absence of actual data (e.g., starting a new line,
using new kind of buses, etc.), it can be derived from
the route path characteristic like the slope and length
applying them a consumption factor on the battery
(KwH/kilometers) and a mean consumption given by
the bus constructor. It constitutes a first approxima-
8
https://leafletjs.com/
9
https://www.mapbox.com/
MODELSWARD 2022 - 10th International Conference on Model-Driven Engineering and Software Development
324
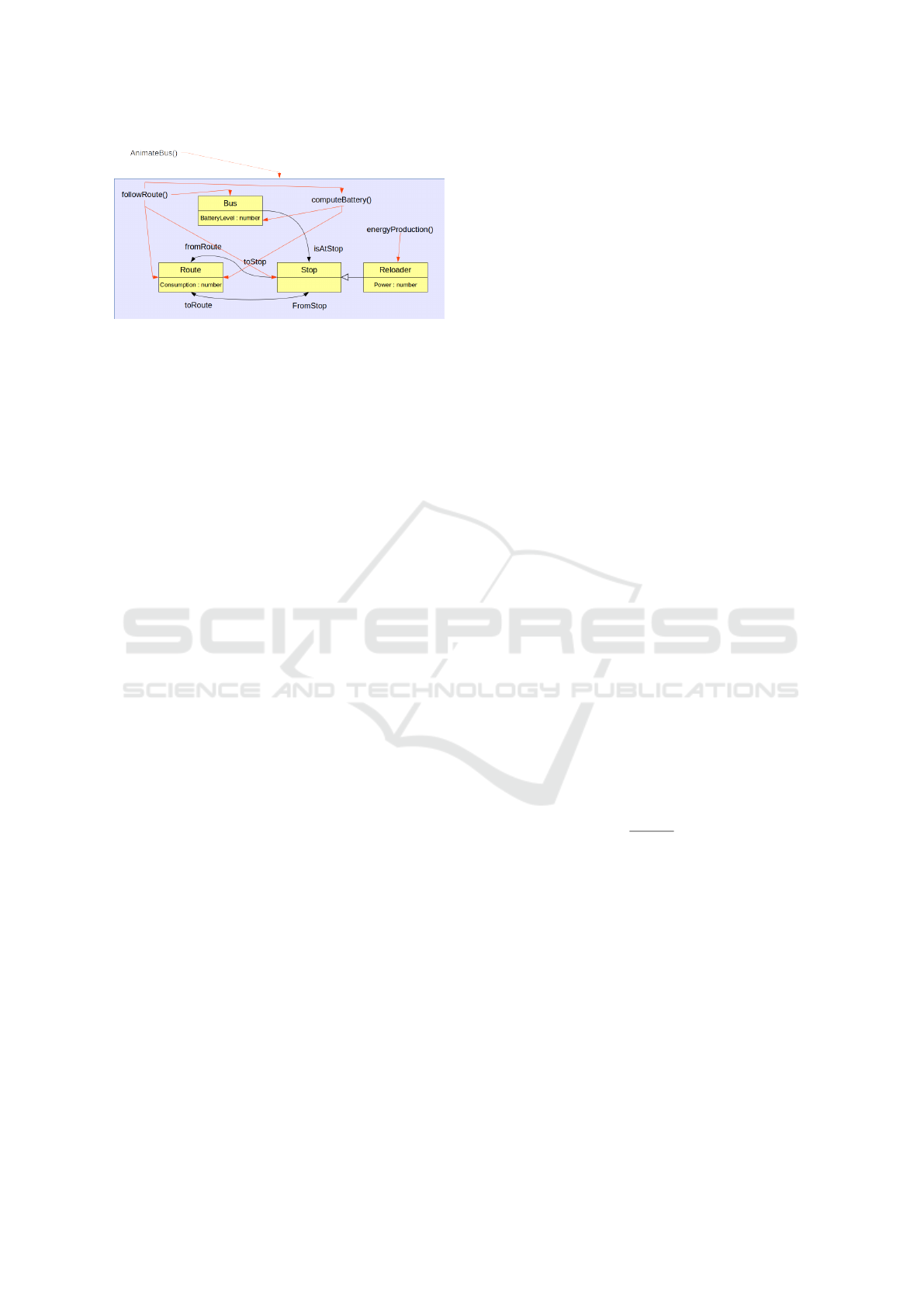
Figure 5: Dependencies relation between dynamic (func-
tions) and metamodel elements.
tion for simulations and be update later with actual
data.
An example of an instantiated metamodel is given
in Listing 3, for sake of simplicity we have removed
some of the attributes like the geographical coordi-
nates.
1 v ar b1 = Bus . n e wI n s t an ce ({ id en ti f i e r :
’B1 ’ , l in eN u mb er :11 , b at t e r ie L ev e l
:10 0} )
2
3 v ar sA = St op . n e wI ns t a n ce ({ n a me : ’A ’ })
4 v ar sB = St op . n e wI ns t a n ce ({ n a me : ’B ’ })
5
6 v ar ro ut eA = ro ute . ne wI n s t an ce ({
co ns u m p ti on :7 , f ro mS to p :sA ,
toS to p : sB })
Listing 3: Example of the model: bus b1 and the first stops
and routes.
3.2.2 Dynamic Information
Once we have defined the static content of the MDDT,
we need to provide, thanks to the diverse domain ex-
pertise, the way to animate our model and potentially
provide simulation. We choose a function approach
on top of our metamodel. The first demonstrator aims
at simulating the buses route based on the previous
model and metamodel. We have thus identified some
of the function required to process or first (and partial)
MDDT. As we work in a potentially evolving environ-
ment, at least the dependencies between the dynamic
function and their corresponding metamodel elements
should be modeled. The Figure 5 summarizes the de-
pendencies relations.
The Listing 4 shows a simple JavaScript that ma-
nipulates the Route, Bus and Stop classes: since the
bus is on duty, it follows the predefined path. We
focus peculiarly on the followRoute function, which
computes a new battery level at each followed route,
time (and potentially time lost), and passengers en-
tering and leaving the bus. It relies directly on the
JSMF model with dot notation: going to the next
destination is then simple as given by the model:
b1.isAtStop[0].toRoute[0].toStop[0].
1 fu nc ti on a ni m a t eB us () {
2 whi le ( b1 . is On Du ty () ) {
3 var fol lo we d = fol lo wR o ut e ( b1 )
4 b1 . b a t t er y Le ve l = fol lo we d .
ne w B a t t e ry L ev e l
5 b1 . i sA tS to p = fo ll ow ed .
de st i n a ti on
6 ...
7 }
8 fu nc ti on f ol l ow Ro u t e ( b1 ) {
9 va r rou te = b1 . i sA tS to p [ 0 ]. t oR ou te
[0]
10 res ul t . d e st in a t i on = rout e . t o St op
[0]
11 res ul t . n e wB a tt e ry L ev e l =
co m p u te B at t er y ( b1 . ba tte ry Lev el ,
rou te . con s um pt io n )
12 .. .
Listing 4: Animation/Simulation of the model using a
simple script.
The function that computes the (estimated) new
battery level regarding the route can be given by a tex-
tual DSL that is representing a business rule or by an
average consumption factor applied on the route con-
sumption. At this stage of our prototype implementa-
tion, we have directly written the javascript function
from general information estimated by experts values
from a given formula.
For each segment of length (Le), the slope (Sl), the
weather (We), the average weight (Pe) depending on
the number of people (Pa) in the bus, possible road-
works (Wo) and traffic (Tr) are taken into account.
Each parameter is expressed as a variable, allowing
to approximate the emulated consumption. Knowing
that an electric bus consumes on average 0.165 kW
per kilometer, we defined the following equation:
Co = 0.165 ∗ (
Le
Sl ∗We
+Wo + Tr)
The Slope is a coefficient in the interval ]0, 7 − 1.3[
Sl ∈ R with 0.7 ≤ Sl ≤ 1.3
The Length of the segment is expressed in km ]3−10[
Le ∈ R with 3 ≤ Le ≤ 10
The Weather is a coefficient in the interval ]0 − 1]
We ∈ R with 0 < We ≤ 1
Which gives in pseudo-JavaScript:
We = Math. f loor(Math.random() ∗ 0.49) + 0;5
People is the coefficient of the over-consumption
depending on the total weight (average 70 kgs) of all
the Passengers including the driver [1-60]
Pa ∈ R with 1 ≤ Pa ≤ 60, Pe = 70 ∗ Pa ∗ 1, 01
Towards a Lightweight Model-driven Smart-city Digital Twin
325

Road Works are triggered by and event (Boolean) and
a time length (min) [1,15], weighted by the coefficient
of a stopped engine consumption
∀E 6= 0 and t ∈ Rwith1 ≤ t ≤ 15Wo = E ∗ 1, 02 ∗ t
Which gives in pseudo-JavaScript:
Wo = 1.02 ∗ (Math.round(Math.random()) ∗
Math. f loor(Math.r andom() ∗ 14) + 1
Traffic is triggered by an event (Boolean) and a
length (km) [1, 10], weighted by the coefficient of an
idled engine consumption
∀E 6= 0 and l ∈ R with 1 ≤ l ≤ 10Tr = E ∗ 1.03 ∗ l
Which gives in pseudo JavaScript:
Tr = 1.03 ∗ (Math.round(Math.random()) ∗
Math. f loor(Math.r andom() ∗ 10) + 1
We have very shortly illustrated that there are
many kind of input in modeling such a system. As
stated in (Bucchiarone et al., 2020), it can be very
broad: scientists can provide advanced mathemati-
cal models, domain experts can deliver business rules,
regulatory experts can restrict or scope with laws, etc.
Managing different aspects in such a context requires
a good coordination of models and modelling lan-
guages to ensure a coherent modelling landscape and
common understanding of stakeholders under the DT
challenges (Bjekovic et al., 2012). This is still a com-
plete open challenge that we try to partially alleviate
using a classical approach: a systematic modelling
and dedicated languages / view for experts.
3.3 MDDT Lifecycle
We have thus designed our first backbone models on
which we can play with to, e.g., simulate the physical
system. This first partial MDDT has more or less con-
sistency with the physical twin. It is assumed, in its
early design time, to be an abstraction of the physical
system. As a result, we can compare the execution
of model with the similar model coming from the ac-
tual bus data (i.e., physical system), expressed in the
same metamodel. From this comparison we can make
evolution of metamodel, model (dynamic and static),
up to a less partial digital twin. It is important to un-
derstand that we can infer refinement (Zolotas et al.,
2019; Sottet and Biri, 2016) of the originally designed
metamodel from collected information in the physical
twin: notably new attributes identification.
Consequently, it is crucial to consider the matura-
tion process of the MDDT under two axis: 1/a more
precise view on physical system (e.g., knowing its
border, better comprehension on requirements, etc.)
2/ the information collected on the physical knowl-
edge which helps to improve the initial MDDT.
We can think of the following prototypical exam-
ple situations from our case study:
• the revision of an attribute value: the route factor
consumption attribute of the Route can be updated
from the real physical system update.
• the revision of a dynamic aspect: the introduction
of time.
• the revision of metamodel elements and related
dynamic aspects taking into account the weather
and its impact on battery energy consumption.
• change the computeBattery() function with re-
gards to actual data and machine learning models.
For instance, it can be executed using tensorflowjs
(from a Keras model) inside the computeBattery()
function as in Listing 5.
1 con st mode l = a wai t tf .
lo a d L a y e rs M od e l ( ’ l o ca l s t or a ge ://
co n su m pt i o n M o d e l ’)
2 re t ur n mode l . p re d ic t ( route , we at he r ) )
Listing 5: Loading a tensorflow model in Javascript.
More generally, we gradually fix the metamod-
els and models of the MDDT for both dynamic and
static aspects. It requires the modelling framework
supporting the MDDT to be flexible enough as one
of both metamodels and models could evolve inde-
pendently. Moreover, the dynamic part may fail to
compute or simulate the model. Reasoning with the
functions dependencies (whatever they are machine
learning or written) is crucial to identify the block-
ing points. When one of this potential blocking point
is identified (e.g., the model structure has changed,
an attribute is not defined (either in the metamodel or
the model)), we should then reason with uncertainty.
Ideally, this is where approximation function based
on past data can be used to provide, e.g., an absent
attribute value. Similarly, to dynamic functions, ap-
proximation function should be modeled with regards
to the backbone metamodel elements.
Moreover, it is important to warn the stakehold-
ers and expose the modeling alternatives like (Famelis
et al., 2012) when, e.g., a new weather concept is
added, about the impact in terms of model element
and computations. This feedback to stakeholders, de-
cision making process is also an open challenge to
deal with when considering MDDT.
4 CONCLUSIONS
This position paper presented our view on the design
of a Digital Twin in a smart-city context. In such an
open context, the system may not have clear bound-
ary, this is especially true when discovering the area
MODELSWARD 2022 - 10th International Conference on Model-Driven Engineering and Software Development
326

or trying to apprehend an issue in the physical sys-
tem. As a result, we propose to complete trendy data-
driven approaches for DT with a flexible and integra-
tive modelling approach.
Through this approach we defined MDDT proto-
types; they are composed by executable models (de-
fined in a static and dynamic ways) that are captured
from a variety of inputs (e.g., different domain exper-
tise, data consolidation, machine learning, etc). Those
executable models allow notably to provide an easy
to use simulation environment. In addition, MDDT
prototypes should be able to evolve, being reinforced,
some part being replace with data-driven ones (e.g.,
machine learning).
Accordingly, there are still a lot of challenges and
future works to be tackled and implemented to fully
support our vision. Let cite amongst other: ensur-
ing the continuity during MDDT evolution, integra-
tion MDDT with a more data-driven approach (e.g.,
FiWare), multi-language and view for stakeholders in-
volvement, and integration with other DT.
REFERENCES
Barricelli, B. R., Casiraghi, E., and Fogli, D. (2019). A
survey on digital twin: definitions, characteristics, ap-
plications, and design implications. IEEE access,
7:167653–167671.
B
´
ezivin, J. (2004). In search of a basic principle for model
driven engineering. Novatica Journal, Special Issue,
5(2):21–24.
Bjekovic, M., Proper, E., and Sottel, J.-S. (2012). Towards a
coherent enterprise modelling landscape. In 5th Conf.
on the Practice of Enterprise Modeling, Rostock, Ger-
many, 2012, pages 1–12. [Sl]: CEUR.
Bordeleau, F., Combemale, B., Eramo, R., van den Brand,
M., and Wimmer, M. (2020). Towards model-driven
digital twin engineering: Current opportunities and
future challenges. In Conf. on Systems Modelling and
Management, pages 43–54.
Bucchiarone, A., Cabot, J., Paige, R. F., and Pierantonio, A.
(2020). Grand challenges in model-driven engineer-
ing: an analysis of the state of the research. Software
and Systems Modeling, 19(1):5–13.
Chakraborty, S. and Adhikari, S. (2021). Machine learn-
ing based digital twin for dynamical systems with
multiple time-scales. Computers and Structures,
243:106410.
Conde, J., Munoz-Arcentales, A., Alonso, A., Lopez-
Pernas, S., and Salvachua, J. (2021). Modeling dig-
ital twin data and architecture: A building guide with
fiware as enabling technology. Internet Computing.
Famelis, M., Salay, R., and Chechik, M. (2012). Partial
models: Towards modeling and reasoning with uncer-
tainty. In 2012 34th International Conference on Soft-
ware Engineering (ICSE), pages 573–583. IEEE.
Grace, P., Pickering, B., and Surridge, M. (2016). Model-
driven interoperability: engineering heterogeneous iot
systems. Annals of telecommunications.
Guermazi, S., Tatibouet, J., Cuccuru, A., Dhouib, S.,
G
´
erard, S., and Seidewitz, E. (2015). Executable mod-
eling with fuml and alf in papyrus: Tooling and exper-
iments. strategies, 11:12.
Kaur, M. J., Mishra, V. P., and Maheshwari, P. (2020). The
convergence of digital twin, iot, and machine learn-
ing: transforming data into action. In Digital twin
technologies and smart cities, pages 3–17. Springer.
Ketzler, B., Naserentin, V., Latino, F., Zangelidis, C., Thu-
vander, L., and Logg, A. (2020). Digital twins for
cities: A state of the art review. Built Environment,
46(4):547–573.
Ladj, A., Wang, Z., Meski, O., Belkadi, F., Ritou, M.,
and Da Cunha, C. (2021). A knowledge-based dig-
ital shadow for machining industry in a digital twin
perspective. Manufacturing Systems, 58:168–179.
Lektauers, A., Pecerska, J., Bolsakovs, V., Romanovs, A.,
Grabis, J., and TEILANS, A. (2021). A multi-model
approach for simulation-based digital twin in resilient
services. WSEAS Trans. Syst. Control, 16:133–145.
Mayerhofer, T., Langer, P., Wimmer, M., and Kappel, G.
(2013). xmof: Executable dsmls based on fuml. In
International conference on software language engi-
neering, pages 56–75. Springer.
Moawad, A., Hartmann, T., Fouquet, F., Nain, G., Klein,
J., and Le Traon, Y. (2015). Beyond discrete mod-
eling: A continuous and efficient model for iot. In
Conf. Model Driven Engineering Languages and Sys-
tems (MODELS), pages 90–99.
Patni, H., Henson, C., and Sheth, A. (2010). Linked sensor
data. In 2010 International Symposium on Collabora-
tive Technologies and Systems, pages 362–370. IEEE.
Peltonen, J. and Selonen, P. (2001). Processing uml models
with visual scripts. In Proceedings IEEE Symposia on
Human-Centric Computing Languages and Environ-
ments (Cat. No. 01TH8587), pages 264–271. IEEE.
Raj, P. and Surianarayanan, C. (2020). Digital twin: the
industry use cases. In Advances in Computers, volume
117, pages 285–320. Elsevier.
Salay, R. and Chechik, M. (2013). Supporting agility in mde
through modeling language relaxation. In XM 2013–
Extreme Modeling Workshop, page 21. Citeseer.
Singh, S., Shehab, E., Higgins, N., Fowler, K., Reynolds,
D., Erkoyuncu, J. A., and Gadd, P. (2020). Data man-
agement for developing digital twin ontology model.
Proc. of the Institution of Mechanical Engineers.
Sottet, J.-S. and Biri, N. (2016). Jsmf: a javascript flex-
ible modelling framework. FlexMDE@ MoDELS,
1694:42–51.
Zarwin, Z., Bjekovic, M., Favre, M., Sottet, J.-S., and
Proper, H. (2014). Natural modelling. Journal of Ob-
ject Technology, 13:4–1.
Zolotas, A., Matragkas, N., Devlin, S., Kolovos, D. S.,
and Paige, R. F. (2019). Type inference in flexi-
ble model-driven engineering using classification al-
gorithms. Software & Systems Modeling, 18(1):345–
366.
Towards a Lightweight Model-driven Smart-city Digital Twin
327
