
Exploitation of Noisy Automatic Data Annotation
and Its Application to Hand Posture Classification
Georgios Lydakis
1,2
, Iason Oikonomidis
2 a
, Dimitrios Kosmopoulos
3 b
and Antonis A. Argyros
1,2 c
1
Foundation for Research and Technology - Hellas (FORTH), Greece
2
Computer Science Department, University of Crete, Greece
3
University of Patras, Greece
Keywords:
Automatic Data Annotation, Noisy Annotation, Hand Posture Classification.
Abstract:
The success of deep learning in recent years relies on the availability of large amounts of accurately annotated
training data. In this work, we investigate a technique for utilizing automatically annotated data in classifi-
cation problems. Using a small number of manually annotated samples, and a large set of data that feature
automatically created, noisy labels, our approach trains a Convolutional Neural Network (CNN) in an iterative
manner. The automatic annotations are combined with the predictions of the network in order to gradually
expand the training set. In order to evaluate the performance of the proposed approach, we apply it to the
problem of hand posture recognition from RGB images. We compare the results of training a CNN classifier
with and without the use of our technique. Our method yields a significant increase in average classification
accuracy, and also decreases the deviation in class accuracies, thus indicating the validity and the usefulness
of the proposed approach.
1 INTRODUCTION
In the past few years, deep learning methods have
revolutionized the field of Artificial Intelligence (AI),
achieving previously unattainable performance on a
plethora of challenging tasks. Examples include im-
age recognition (He et al., 2015), natural language
processing and machine translation (Cho et al., 2014)
and speech recognition (Graves et al., 2013).
In the case of supervised learning, annotating
large amounts of data can quickly become very costly
in terms of human effort, especially so if the annota-
tion procedure is itself difficult, for example, creating
pixel-level segmentation masks. For this reason, be-
sides semi-supervised and unsupervised learning, re-
search is also highly active in the field of reducing
the annotation effort required for training deep mod-
els in a supervised manner. In this work, we propose a
technique for utilizing a large number of samples that
have been automatically annotated with labels for a
classification task. Given that the annotation is au-
tomatic, it is possible that the extracted labels may
a
https://orcid.org/0000-0002-9503-3723
b
https://orcid.org/0000-0003-3325-1247
c
https://orcid.org/0000-0001-8230-3192
Figure 1: A classifier trained only on a small dataset may
fail to recognize that the hand posture depicted in these two
images is the same. We propose a method to exploit au-
tomatically annotated, noisy data in order to train a better
hand posture classifier.
be noisy. Reliable automatic annotation systems are
generally very hard if not impossible to design and
build, depending on the targeted problem. Generally,
most current Computer Vision approaches can yield
somewhat reliable results under specific, controlled
scenarios, but in general it is unavoidable to have fail-
ure cases, to a varying degree.
The method we develop is generic in nature, and
can be tailored to address any classification problem.
It assumes the existence of a small number of manu-
ally annotated samples, as well as a large set of au-
632
Lydakis, G., Oikonomidis, I., Kosmopoulos, D. and Argyros, A.
Exploitation of Noisy Automatic Data Annotation and Its Application to Hand Posture Classification.
DOI: 10.5220/0010906200003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 5: VISAPP, pages
632-641
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

tomatically annotated ones, whose labels might be
noisy. We begin by training a Convolutional Neural
Network (CNN) on the manually annotated data, re-
sulting in a classifier that might not generalize well,
given the small number of samples.
Then, we compare the predictions of the network
for all automatically annotated samples with the noisy
ground truth labels. We incorporate in the training
set a subset of those, for which the predictions of the
classifier agrees with the labels. The intuition is that
the agreement of the two predictors (classifier, noisy
automatic annotation) is probably not coincidental.
The network is then trained again on the new dataset,
and the procedure is iteratively repeated until there is
no improvement in validation accuracy. We exper-
iment with two variations of the method, based on
how conservatively/aggressively we expand the train-
ing dataset with automatically annotated data.
In order to evaluate our technique, we apply it to
the problem of hand posture recognition from RGB
images (see Figure 1). The posture and motion of
hands play an important role in conveying informa-
tion in sign languages, when combined with other
non-manual features. Motivated by the domain of
Sign Language Recognition, we formulate a clas-
sification problem for hand postures used in Greek
Sign Language. More specifically, we aim to de-
velop a lightweight, yet robust hand posture classi-
fier. We present a method that processes unlabeled
videos of subjects signing, and automatically assigns
posture labels to the frames. This is based on us-
ing a 3D hand pose estimation tool, Google’s Me-
diaPipe (Zhang et al., 2020), for estimating the pos-
ture in each frame, and comparing the 3D configura-
tions of joints to those corresponding to the problem’s
classes. Precisely because the annotation produced
in this manner is contaminated with noise, this is a
suitable problem on which to apply the techniques we
present for handling noisy ground truth data.
2 RELATED WORK
This section briefly summarizes methods for the re-
duction of annotation effort, including machine learn-
ing approaches, and related ideas. A general tech-
nique which is comonly used both for annoatation ef-
fort reduction, and impeoved generalization is data
augmentation (Shorten and Khoshgoftaar, 2019). A
domain-specific technique is presented by Voigtlaen-
der et al. (Voigtlaender et al., 2021), for the prob-
lem of semi-supervised video object segmentation.
The authors propose a network to extract pixel-level
pseudo-labels given bounding boxes.
Reducing annotation effort is also desirable in the
field of active learning, the field of machine learning
where an algorithm repeatedly queries a user, known
as the oracle, for labeling new data. Sun et al. (Sun
and Loparo, 2020) argue that even though several au-
tomatic or semi-automatic annotation methods can re-
duce the number of instances that need to be labeled,
the queries to the oracle which offer the most to the
learning algorithm remain the most difficult cases to
label. The authors attempt to alleviate this issue by
leveraging available metadata that can give the ora-
cle “hints” for the labeling process, by clustering data
points with similar metadata attributes. In contrast to
active learning approaches, our work does not assume
perfect on-demand annotation of samples, but rather
estimates the most probable class label of samples,
closer to the semi-supervised learning paradigm.
Semi-supervision refers to a family of machine
learning techniques which operate on a small set of
manually labeled data combined with a larger set of
unlabeled data. These techniques are also relevant
to the problem of reducing annotation effort. Semi-
supervised learning refers to methods that are trained
on a combination of a small amount of manually an-
notated data and a large amount of unlabeled data.
Honari et al. (Honari et al., 2018) develop two tech-
niques for landmark localization based on partially
annotated datasets. The authors leverage the lim-
ited samples with landmark annotation, as well as a
more abundant set of samples for which only a more
general, high-level label is available. This label can
be either for a classification or regression task, and
serves as an auxiliary guide towards localization of
landmarks on the unlabeled data. Wan et al. (Wan
et al., 2017) present a semi-supervised approach for 3-
D hand posture estimation from single depth images.
The approach creates two generative models which
share a feature space, such that any point in this space
can be mapped to a unique depth image, and a unique
3-D hand pose.
Another approach related to semi-supervision and
active learning is that of label propagation (Zhu and
Ghahramani, 2002). Label propagation starts with a
small set of labeled samples, and a larger, unlabeled
set. The key idea is to progressively label samples
from the unlabeled set, based initially only on the
knowledge of the labeled samples, but gradually la-
beling more unlabeled ones, hence “propagating” the
known labels. Our approach is similar to label propa-
gation in the sense that it also begins by only using a
small set of "trusted" samples. In contrast, however,
we assume that all of the other samples are labeled as
well, with labels that feature noise.
Exploitation of Noisy Automatic Data Annotation and Its Application to Hand Posture Classification
633
D
manual
(initial
training set)
Train CNN
D (many
unlabeled
samples)
Use M to label
Predict labels for D
Select some
samples where
labels agree
Add to training
set
Repeat while
accuracy on
D
validation
increases
D
auto
(noisy)
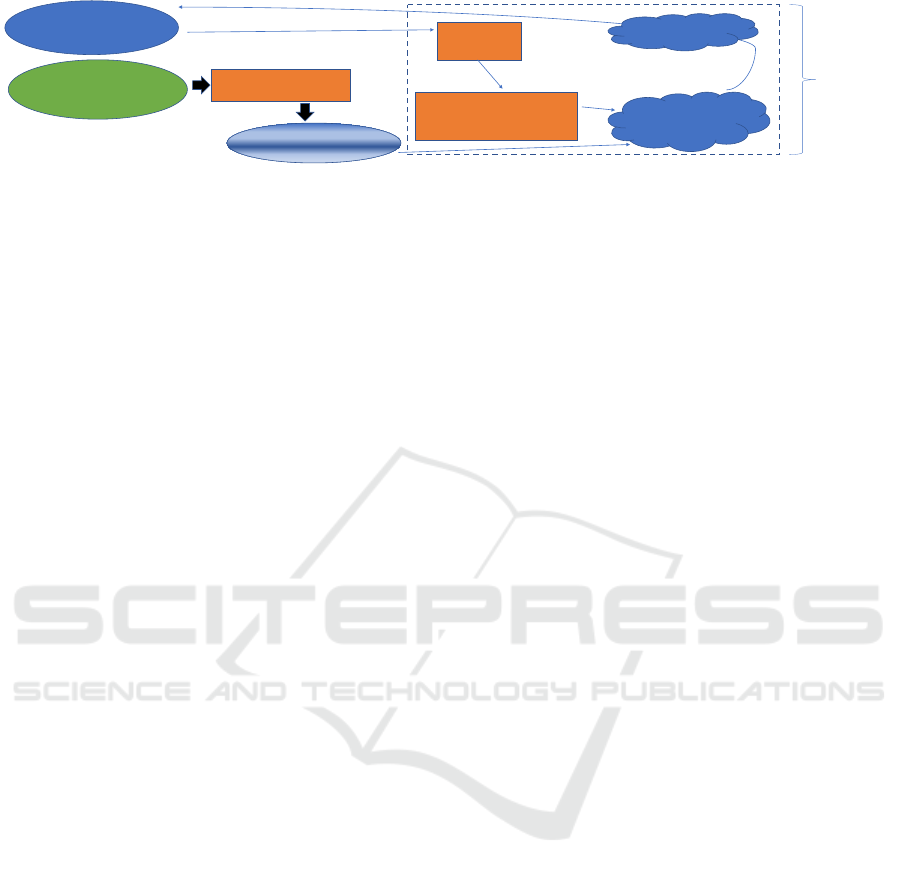
Figure 2: Overview of the proposed approach. We assume the availability of a small, manually labeled and therefore reliable
dataset D
manual
(top left), and a larger unlabeled one D (bottom) left. Furthermore, an automatic method is assumed to provide
noisy labels for D, yielding D
auto
(bottom middle). We start by training a classifier on the reliable dataset D
manual
, and proceed
to iteratively expand the training set by adding samples from D where the prediction of the trained classifier agrees with the
automatic annotation in D
auto
.
An old paradigm in semi-supervised learning is
self-learning, or self-training (Chapelle et al., 2009),
which is based on the repeated use of a supervised
method. Initially, the supervised algorithm is trained
on labeled data only, and on each step some of the un-
labeled data is labeled using the trained model. The
procedure is repeated, and the training set gradually
expands to feature data labeled by the algorithm it-
self. Also relevant to the topic of reduced annotation
effort is the concept of learning from data where the
ground truth is noisy. Automatically created ground
truth has a greater chance of featuring noise. There-
fore, techniques that tackle this issue also facilitate
the use of automatic annotation methods. Jiang et
al. (Jiang et al., 2018) develop a strategy for training
on noisy ground truth based on Curriculum Learn-
ing. Curriculum Learning, developed by Bengio et
al. (Bengio et al., 2009), is a technique for guid-
ing the optimization of a neural network by present-
ing the training examples in an order which encour-
ages it to progressively learn more complex features.
Jiang et al. (Jiang et al., 2018) apply this concept
by simultaneously training two networks, one which
learns the actual task featuring the noisy ground truth,
and another which learns how to guide the first by
presenting samples that are deemed correct. While
the second network undergoes a training process, the
curriculum adapts to the data at hand. Hacohen et
al. (Hacohen and Weinshall, 2019) investigate Cur-
riculum Learning with two strategies. The first one
involves a “teacher” network which transfers knowl-
edge it has accumulated from some other dataset. The
second is a type of bootstrapping, where the network
is first trained on the target dataset without any cur-
riculum. Han et al. (Han et al., 2018) also tackle the
problem by coining the method “Co-teaching”. It in-
volves training two networks simultaneously, where
each one teaches the other about what data it con-
siders correctly labeled. The intuition is that a net-
work tends to learn correct samples in the first stages
of optimization, and memorize the wrong ones at a
later point (Arpit et al., 2017). Mirzasoleiman et
al. (Mirzasoleiman et al., 2020) address the same is-
sues by developing a method that can select subsets of
the data that are likely to be free of noise. Their selec-
tion is based on inspecting the Jacobian matrix of the
loss function being optimized, and choosing medoid
data points in the gradient space. By choosing the
samples in this fashion, they avoid overfitting on cor-
rupted ground truth samples.
Li et al. propose DivideMix (Li et al., 2020),
an approach to learn from noisy labels by leverag-
ing semi-supervised techniques. Specifically, a mix-
ture model on the loss is used to divide the train-
ing data into a labeled set with clean samples and
an unlabeled set. Northcutt et al. propose Confi-
dent Learning (Northcutt et al., 2021), an approach
to estimate the confidence/uncertainty of dataset la-
bels. We choose this approach to experimentally com-
pare against our work, since it is a recent, state-of-
the-art work, with an easy to use and actively devel-
oped code base. Overall, on the topic of learning from
noisy labels, Song et al. present a comprehensive
overview (Song et al., 2020).
We propose an approach for working with noisy
ground truth data that have been automatically an-
notated. Our approach exhibits similarities to the
approaches presented here, especially to Curriculum
Learning (CL) and self-training approaches. This is
because it attempts to select appropriate subsets of the
automatically annotated training data. Furthermore,
this is done in an iterative manner, exploiting the pre-
dictions of the trained classifier itself. Overall, the
most suitable learning paradigm fitting our approach
is that of semi-supervised learning, and more specifi-
cally self-training. In contrast to self-training, our ap-
proach explicitly focuses on cases with large amounts
of noisy data. To the best of our knowledge, no sim-
ilar approaches on self-training with noisy labels or
on related areas have been proposed in the relevant
literature.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
634

3 METHODOLOGY
In this Section we describe the proposed approach in
detail, and also the method we followed to prepare
data for the target task of hand posture recognition.
3.1 Exploiting Automatic Ground Truth
We assume a classification problem featuring K
classes, and a method which is capable of automat-
ically classifying a sample in one of these classes.
However, it is assumed that this method is imperfect,
yielding some erroneous annotations. It is expected
that training a CNN model on a dataset with misla-
beled samples will affect its ability to discriminate
among the classes of the problem. It is therefore use-
ful to investigate techniques that can take advantage
of this noisy automatic labeling.
Among all candidate techniques, the simplest way
to utilize automatically annotated data is to consol-
idate large numbers of such samples, potentially re-
ducing the impact of failure cases on the performance
of the classifier. One could also treat those sam-
ples as completely unlabeled, combining them with
a small number of manually annotated samples and
thus adopt a semi-supervised approach. However, it
is our intuition that the utilization of a noisy ground
truth label can be beneficial, and therefore a more
sophisticated approach can be devised. Specifically
we assume the availability of a large dataset, D
auto
for which automatically produced ground truth labels
are available. We also have a small set of samples,
D
manual
which we have annotated manually, and thus
their labels are expected to be significantly less noisy.
Training a model only on D
manual
is likely to yield a
classifier that does not generalize effectively. How-
ever, an important observation is that it can still pro-
vide a noisy estimate of the likelihood of a sample be-
longing in a particular class. For a novel sample, the
commonly employed “one-hot encoding” for classifi-
cation tasks will yield continuous values in the range
[0 − 1] (one per class), which can serve as estimates
of such likelihoods.
Therefore, we can train a model on D
manual
, com-
pute its predictions on all samples of D
auto
, and se-
lect only those samples where the prediction agrees
with the labeling produced by automatic annotation.
This yields D
auto,0
⊆ D
auto
, a set of samples which are
more likely to be correctly labeled, since we are con-
servatively selecting only the samples for which two
noisy predictors agree. We expect a model trained on
D
manual
∪ D
auto,0
to generalize better than one trained
on D
manual
only, since it has a larger number of sam-
ples from which to extract useful classification fea-
tures. Furthermore, the increased number of samples
is more likely to prevent overfitting.
By continuing this iterative process, increasingly
robust classifiers are formed, and we expect a better
utilization of D
auto
, since the combination of the two
predictors will filter out some of the noise of the au-
tomatic annotation, as shown in Figure 2. Assuming
a validation set, we can continue this iterative process
until the validation accuracy of the classifier trained
on the selected data no longer increases, or starts to
decrease. The latter could potentially occur if the au-
tomatic labeling results in many similar samples with
the same incorrect label. Even if only a few of those
samples are added in the training set, the capacity of
the model to memorize could result in more wrongly
annotated samples “contaminating” the training set
later on. We call this iterative scheme “Greedy Itera-
tive Dataset Expansion Algorithm”, or “G-IDEA”.
Furthermore, we expect the classifier’s predictions
to become more trustworthy as the iterations progress,
since it has more data available for training. Further-
more, as previously discussed, if many similar incor-
rect samples exist in D
auto
, a model trained on a few
of them can end up memorizing them. Subsequently,
it is more likely to introduce more similarly incorrect
samples in its dataset as the iterations progress.
Motivated by these observations, we can modify
G-IDEA: On each iteration, only a portion of the data
where the predictions agree with the automatic la-
beling is included in the training set, as illustrated
in Figure 2. To select this portion, we assume that
the model outputs K numbers representing the likeli-
hoods of a sample belonging in each of the K classes.
For each of the classes we can then order the pre-
dicted samples by decreasing likelihood. Intuitively,
we are ordering the samples by a measure of how cer-
tain the model is of its predictions. We can then select
only a conservative percentage of each class’ data,
and then gradually increase this percentage as the it-
erations progress. We call this modification “Con-
servative Iterative Dataset Expansion Algorithm”, or
“C-IDEA”. Algorithm 1 outlines a simplified version
of C-IDEA, with the addition of new samples per-
formed over the whole dataset, for clarity of the pre-
sentation. This approach, C-IDEA, is the proposed
method to exploit noisy, automatically annotated la-
bels. Apart from motivating the development of C-
IDEA, G-IDEA serves as a baseline in the quantita-
tive evaluation.
3.2 Hand Posture Recognition
As already mentioned, the algorithms presented
above are applicable in any classification problem.
Exploitation of Noisy Automatic Data Annotation and Its Application to Hand Posture Classification
635

Algorithm 1: Simplified version of C-IDEA: In practice the
addition of samples is performed per class to avoid class
imbalance in later iterations.
Input:
D
manual
, a set of manually annotated samples
D
auto
, a set of automatically annotated samples
D
validation
, validation set, also manually annotated
sel_r, initial training data selection ratio ( ∈ (0, 1] )
inc_ f actor, ratio increase factor per iteration
Output:
m, a CNN model trained on selected input data
D
selected
, the selected training data
m ← train a model on D
manual
D
selected
← D
manual
while accuracy on D
validation
increases do
new_data ← all samples of D
auto
\ D
selected
where the predicted class output of m agrees with
the label given in D
auto
l ← per sample likelihoods of all samples in
new_data, as estimated by m
new_data ← sort new_data according to de-
creasing likelihood l
sel_data ←first bsel_r · size(new_data)c ele-
ments of new_data
D
selected
← D
selected
∪ sel_data
m ← train a model on D
selected
sel_r ← min(1, sel_r · inc_ f actor)
m ← m
best
(the best performing model among all
trained models according to validation accuracy)
D
selected
← D
best
(similarly to above, the training
set of m
best
)
return m, D
selected
For the current work, we choose to apply and evalu-
ate them on the problem of hand posture recognition
from RGB images. Given a single RGB image of a
human hand, the task here is to output a label indicat-
ing which of the K postures appears on the image.
Experimental evaluation of the proposed tech-
niques requires us to specify a set of hand postures
which we are interested in recognizing. Motivated by
the general problem of Sign Language Recognition,
we apply our methods to a set of hand postures that
convey semantic information in Greek Sign Language
(GSL). Although recognition and translation of GSL
cannot be performed with hand posture information
only, the configuration of each hand can serve as a
useful feature in the general task.
3.3 Automatic Hand Posture Extraction
As already outlined, the proposed approach assumes
an automatic way to label a large part of the dataset,
D
auto
. Therefore, in the following we outline the
approach we used to automatically label images of
sign language. As already mentioned, this approach
doesn’t need to estimate perfect labels, in fact the
annotation is assumed to be noisy. Our approach is
based on extracting the 3-D keypoint structure of the
hands. Then, each frame is assigned the label of the
posture that best matches this structure, among a pre-
defined set of postures we are interested in recog-
nizing. In order to represent 3-D hand postures, we
adopt a hand model commonly used in relevant litera-
ture (Panteleris et al., 2018; ?; ?). This model consists
of 21 keypoints, the joints of the palm and fingers.
The first step in assigning one of K labels to any
subset of the frames is extracting this 3-D structure
for all classes and all frames. To achieve this, we used
MediaPipe Hands (Zhang et al., 2020), a software de-
veloped by Google, capable of extracting 2.5-D hand
landmarks from RGB images.
Given an input image of dimensions W × H, the
scheme (Zhang et al., 2020) utilized by Mediapipe
represents each hand posture as a 21-tuple of 3-tuples,
P = ((x
1
, y
1
, z
1
), (x
2
, y
2
, z
2
), . . . , (x
21
, y
21
, z
21
)).
All x
i
, y
i
are in the range [0, 1], and x
i
W , y
i
H equal the
horizontal and vertical pixel coordinates of landmark
i in the image, respectively. Furthermore, z
i
repre-
sents the relative depth of landmark i: the wrist joint
is positioned at depth 0 by convention, and the re-
maining depths are appropriately assigned. In order
to compare hand postures via their corresponding 3-
D keypoints, we first have to transform all poses to a
common coordinate system
1
.
For translation and rotation normalization we as-
sume that the wrist joint and the base joints of all
fingers and thumb can be considered approximately
rigid in the human hand. Let P = ( j
0
, j
1
, . . . , j
21
) be
a hand posture in an image of dimensions W × H as
described previously, with j
i
= (x
i
, y
i
, z
i
) correspond-
ing to the i-th landmark as described above. Then,
P
0
= ( j
0
− j
0
, j
1
− j
0
, . . . , j
21
− j
0
) is the same pos-
ture translated so that the wrist lies at the origin.
We continue by rotating all the points of P
0
so that
the vector from the wrist to the base of the index
finger is lying on the x axis, and the palm is ly-
ing on a predefined plane. It is now partially mean-
ingful to define the distance of two hand postures,
P
1
= ( j
1,1
, j
1,2
, . . . , j
1,21
), P
2
= ( j
2,1
, j
2,2
, . . . , j
2,21
) as
the sum of the Euclidean distances of all correspond-
ing joints, as in Equation 1. However, the character-
istics of each individual hand (e.g. finger lengths) can
1
For this work, we make the simplifying assumption
that no two classes can differ from one another solely by
a common rotation of all their landmarks.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
636

adversely affect this sum: two different hands per-
forming the same posture may end up having a dis-
tance significantly larger than zero if their anatomical
structures are different.
Therefore, it is necessary to also normalize the in-
dividual hand characteristics. To this end, we chose
a predefined hand model, H
0
= ( j
0,1
, j
0,2
, . . . , j
0,21
),
and apply the following transformation on all pos-
tures, in order to match their structure with H
0
. We
first replace all the finger base joints in the normalized
pose by their respective ones in H
0
, effectively forcing
an identical palm size. Then, for each “bone” (that is,
segment of consecutive joints in the kinematic chain),
we change its length to match the respective one of
H
0
, while preserving its direction in space.
We can now proceed to compare hand poses. To
this end, as already mentioned, we employ the sum of
euclidean distances between corresponding hand key-
points, after they have been normalized as above
d(P
1
, P
2
) =
21
∑
k=1
k j
1,k
− j
2,k
k. (1)
We now have a way of comparing every hand pos-
ture of every frame with the postures that correspond
to the classes of our problem. More precisely, we are
given K input images, each corresponding to a partic-
ular hand posture (that is, to a class of the problem)
and a set of videos, each of them featuring one of sub-
jects performing these hand postures. The end goal is
to automatically label a subset
2
of the frames that can
be then be used to train the classifier we are designing.
Towards this end, the K reference hand postures
are compared with each of the frames to be automat-
ically labeled, according to the metric of Equation 1.
Each frame is then assigned the label of the reference
pose with the lowest distance. The resulting dataset is
termed D
auto
. Furthermore, we proceed to manually
or semi-automatically (with the aid of automatically
extracted labels as above) annotate a small part of the
available images into the datasets D
manual
, D
validation
,
and D
test
, paying attention to include images of differ-
ent singers in each of them, excluding also the signers
in D
auto
.
4 EXPERIMENTAL EVALUATION
We present an evaluation of our proposed methods ap-
plied to the problem of hand posture recognition from
2
In practice many of the frames of a video recording
must be discarded because the signer is in the so-called
“neutral pose”. We resort to simple heuristics such as
thresholds on hand motion to detect and reject such frames.
RGB images. Firstly, we present the datasets that are
used for model selection (validation set) and perfor-
mance estimation (test set). We then present the de-
tails of the training procedure, with respect to the net-
work’s hyperparameters and data augmentation pro-
cess. Finally, we compare the performance of CNNs
trained with and without the use of the algorithms out-
lined in section 3.1.
4.1 Employed Datasets
In order to evaluate the proposed approach in real-
world data we employ the HealthSign dataset, which
is detailed in (Kosmopoulos et al., 2020). This is
a dataset focused on communication of deaf patients
with health professionals. From an analysis of the
450 most common glosses in the HealthSign dataset
we found 38 postures being used at least once. From
these 38 postures, we selected 19, for which the au-
tomatic annotation process had yielded some initial
label, aiding the manual annotation process.
Apart from the images in the HealthSign dataset,
more data were found from YouTube videos of sign-
ing subjects, as well as some more were captured
by us. Seven male and three female volunteers per-
formed the identified hand postures under our instruc-
tions, contributing to the available images. Overall,
the HealthSign dataset features 8 signers, and from
YouTube videos and our recordings we added another
7 and 10 signers respectively to the pool.
Among these, images from the HealthSign dataset
were used for manual annotation, essentially exclu-
sively populating the D
manual
dataset. The remaining
of the data were predominantly used for automatic la-
beling (populating D
auto
) whereas some of the sign-
ers were held out, populating respectively either the
D
validation
or the D
test
parts of the dataset. Figure 3
shows three example images for posture “Y” from the
test set, each from a different signer.
4.2 Classifier Architecture and Training
For all the experiments presented below, we choose
the MobileNet v2 network (Sandler et al., 2019) ar-
chitecture as the base for the classifiers we train. We
choose it because it is a recent lightweight architec-
ture that can be used in real-time conditions on smart-
phones, while also achieving high accuracy (e.g. on
the ImageNet dataset (Deng et al., 2009)). In partic-
ular, we always start with a MobileNet v2 model that
has already been trained on the ImageNet dataset. In
order to adapt the model to our classification problem,
we add a fully connected layer after the convolutional
part of the MobileNet architecture. Each of its neu-
Exploitation of Noisy Automatic Data Annotation and Its Application to Hand Posture Classification
637

Figure 3: Three examples of images included in the test set
for the posture “Y”, from three different signers.
rons has as inputs all outputs of the final layer of the
MobileNet architecture, and there are as many neu-
rons as the K classes of the problem. Finally, the K
outputs (x
1
, x
2
, . . . , x
K
) are fed through a log-softmax
layer since we are aiming for classification among K
classes. During training, the objective function is the
negative log likelihood loss function, which is com-
monly used for classification problems.
We tried both the AdaDelta (Zeiler, 2012) and
Adam (Kingma and Ba, 2017) optimizers, with
the PyTorch (Paszke et al., 2019) default learning
rates 1 and 10
−3
respectively. Preliminary exper-
iments determined that the Adam optimizer gener-
alized marginally better. The experiments detailed
below were all performed with the Adam optimizer
with this parameterization. During training we used
a batch size of 64 samples. In every experiment pre-
sented below, the corresponding CNN was trained for
120 epochs. At the end of each epoch, the accuracy
of the classifier on the validation set was measured,
and the final model for that experiment was chosen to
be the one which achieved maximum validation accu-
racy.
The fact that the classes are assumed rotationally
invariant allows us to use a random rotation between
0
◦
and 360
◦
as augmentation. Since the images fed
to the network are already tightly cropped around the
hand, we avoid using random cropping as augmenta-
tion, since it could result in obscuring parts of the im-
age that contain useful information for classification.
We do, however, use a random translation augmenta-
tion of up to 10% of the image’s dimensions. After
applying all transforms, each image that is fed to the
network is always scaled to be 224 × 224 pixels in
size, and also normalized so that its pixel values have
a mean of µ = (0.485, 0.456, 0.406) and standard de-
viation of σ = (0.229, 0.224, 0.225) (values computed
on the ImageNet dataset, and recommended for use
with a pretrained MobileNet model).
For the case of training images that originate from
the HealthSign dataset, we also apply one custom data
augmentation step before applying any of the others
described above. Specifically, because the Health-
Sign videos were recorded in a room with a mostly
green background, we can determine an approximate
Figure 4: Transforming the background of HealthSign im-
ages. On the left, one of the original images. On the right,
the same image augmented with a random background.
pixel value (r
bg
, g
bg
, b
bg
) for the background color in
an offline preprocessing step. Then, during training,
we can perform a crude segmentation of the back-
ground based on these color values. Having selected
the background pixels, we then replace them with the
corresponding pixels from an image randomly sam-
pled from the Stanford backgrounds dataset (Gould
et al., 2009). Figure 4 illustrates applying this trans-
formation to an example image. We apply this trans-
formation with a probability of 0.7 on any HealthSign
training image that is fed to the network. This serves
to provide greater variety to the HealthSign data, re-
ducing the probability of overfitting on irrelevant fea-
tures, such as learning to expect a green background
around some or all hand postures.
4.3 Experimental Evaluation
As a first, baseline experiment, we trained a classi-
fier as outlined above, only on the manually anno-
tated dataset D
manual
. In this case, the trained model
achieved an average accuracy of 46.5% on the valida-
tion set, and 41.5% on the test set.
Next, we experimented with the use of automati-
cally annotated data as a complement for our small set
of manually annotated images, naively adding them
to the training pool. This is a large pool of samples
from 17 signers. We progressively added more au-
tomatically annotated samples ordered by lowest dis-
tance (see Equation 1), only keeping the balance of
samples per class and signer. We experimented with
several values for the number of samples per class
for every signer, beginning with 15 images per signer
class, similarly to the manually annotated samples.
By the term signer class we refer to all the images
belonging in a particular class which feature the same
signer. Specifically, we experimented with the val-
ues of 30, 60, 120 and 500 images per signer class.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
638

Table 1: Validation accuracy achieved when using a vari-
able number of images per signer class. Top row: Images
per signer class, bottom row: Validation accuracy.
15 30 60 120 500
69.06% 71.33% 70.4% 72.3% 73.38%
Figure 5: Validation accuracy achieved on each iteration
when using G-IDEA.
Table 1 summarizes the highest validation accuracies
recorded with each configuration.
We observe that, even with 15 images per signer
class, there is a significant improvement (25%-30%)
over using manually annotated data only. Further-
more, increasing the number of images per signer
class is, in general, beneficial to validation accuracy.
We record the highest validation accuracy of 73.38%
when using 500 images per signer class. However,
we also observe that the increase in accuracy is rather
small in proportion to the increase in training set size.
Considering that a large number of new, correctly
labeled samples are introduced, one might expect a
larger increase in accuracy. This hints that a signif-
icant amount of mislabeled samples have gradually
been introduced in the dataset as well. We stopped
experiments at 500 images per signer class because
the increase in performance had almost plateaued at
500, and the additional computational cost didn’t jus-
tify experimenting with larger values.
Next, we experimented with G-IDEA, serving as
a baseline for C-IDEA. In this case, the training sam-
ples were iteratively selected by the proposed ap-
proach, as outlined in Section 3.1. For this reason,
we anticipated the method to result in a less noisy
dataset. Consequently, we also expected improve-
ments on validation and test accuracy. Indeed, this
was observed, as shown in Figure 5, depicting the
evolution of validation accuracy on each iteration of
the algorithm. Peak accuracy was reached on iteration
2, and the algorithm terminated on iteration 3, since
the accuracy no longer increased. We ran the algo-
rithm for two more iterations, and validation accuracy
continued to decrease very slowly.
Figure 6: Validation accuracy achieved on each iteration
when using C-IDEA.
Average accuracy was increased over the naive ap-
proach by approximately 5% both on the validation
and test set. Furthermore, we observed in the re-
spective confusion matrices that cases of confusion
between specific classes decreased compared to the
naive approach. Also, without the use of this algo-
rithm the lowest class accuracy recorded on both val-
idation and test sets was 25%, even if the average
accuracy was in the order of 70%. When using G-
IDEA, the lowest class accuracy was 44%. Filtering
noisy ground truth samples therefore apparently con-
tributes to the performance of a trained classifier, al-
though there is still potential for further improvement.
Finally, the proposed approach, C-IDEA was ex-
perimentally assessed, which also selects new train-
ing samples iteratively, but makes its selections in a
more conservative manner. We assessed whether this
more conservative strategy could yield improvements.
In particular, we used the aforementioned algorithm
with parameters sel_rat = 0.1 and inc_ f actor = 0.15.
The evolution of validation accuracy as the iterations
progress is shown in Figure 6. Compared to G-IDEA,
accuracy increased at a slower rate, which is to be ex-
pected, since the increase of training data is by design
slower. However, from iteration 5 onward, C-IDEA
achieved accuracies higher than the ones recorded in
the previous experiment, culminating in a validation
accuracy of 83.81%.
We recorded an accuracy of 83.81% on the vali-
dation set, and 85.72% on the test set, thus improving
by approximately 5% over G-IDEA. The lowest class
accuracy recorded on both validation and test set was
now 65%, and we observed once again a decreased
number of cases where one class was significantly
confused with another. Therefore, C-IDEA appears
capable of selecting mostly correct samples.
As a comparison with the state of the art, we
performed an additional experiment using the Confi-
dent Learning method by Northcutt (Northcutt et al.,
2021). In that experiment, the whole training dataset,
Exploitation of Noisy Automatic Data Annotation and Its Application to Hand Posture Classification
639

Table 2: Summary of validation and test accuracies
achieved by each method.
Technique/data Vali. Test
accuracy accuracy
Manual data 46.45% 41.52%
Manual & automatic data 73.38% 74.19%
G-IDEA (proposed) 78.83% 80.04%
C-IDEA (proposed) 83.81% 85.73%
Confident Learning
(Northcutt et al., 2021) 73.58% 74.84%
D
manual
∪D
auto
, was jointly provided to that method
3
,
which then decided which samples were to be trusted.
The resulting selection was then used to train a clas-
sifier. The validation accuracy of this model was
73.58%, marginally better than the naive approach.
Therefore, while it manages to slightly improve over
the naive approach, evidently our proposed approach
is better suited for the task at hand. One reason for
this may be the fact that our approach treats differ-
ently the parts D
manual
and D
auto
, trusting the first to
exploit the second.
The experimental analysis presented in this sec-
tion proves that automatically annotated data can be
highly beneficial in our problem. The mere inclusion
of automatically labeled samples contributes signifi-
cantly to the generalization of the network, increas-
ing average accuracy on unseen data from the range
of 40%-45% to 73%-74%. Furthermore, the cost in
human effort for gathering the data is rather small.
Additionally, the use of C-IDEA further increases ac-
curacy to 83%-85%. These results are summarized
in table 2, along with the performance of Confident
Learning (Northcutt et al., 2021) for comparison.
5 DISCUSSION
5.1 Summary
We presented a method for utilizing automatically an-
notated data in training CNNs on classification prob-
lems. The method is based on training the network on
a small subset of manually annotated data, and then
iteratively adding samples that are likely correctly la-
beled. Iteratively, the network is retrained on the new
training set, gradually becoming more accurate. We
applied these techniques on the problem of hand pos-
ture recognition from RGB images.
3
We used the implementation provided by the authors.
5.2 Limitations
A limitation that stood out during the experimental
evaluation of our approach was a sensitivity of the
proposed approach in inherently ambiguous classes.
Specifically for our test case, postures of different
classes that nevertheless were similar, for example
differing by the pose of a single finger, were more
tricky to correctly classify. This may happen because
an incorrectly labeled sample may lead to a cascad-
ing effect: after the network is trained with it, similar,
incorrectly labeled samples enter the training set, per-
petuating the initial classification error. Nevertheless,
the proposed approach still outperformed the naive
approach, probably because the selected correctly la-
beled samples outnumbered the incorrect ones in the
later iterations. More generally, spurious entries in
the early steps are problematic because they may lead
to this cascading effect. A potential mitigating strat-
egy would be to reevaluate the selection, and remove
some of the least confident samples in each iteration.
5.3 Future Work
Among the numerous future directions of this work, a
few stand out: Better heuristics to determine the most
appropriate samples to add in each iteration can po-
tentially yield further improvements. Also, the prob-
lem of hand posture recognition may benefit from dif-
ferent 3D hand pose estimation techniques, other than
MediaPipe (Zhang et al., 2020), or even in conjunc-
tion with it. Another interesting direction to investi-
gate is the possibility to train and use multiple classi-
fiers, in a boosting fashion. This would allow for more
reliable class predictions and possibly faster conver-
gence of C-IDEA. Finally, problems other than hand
posture classification are worth investigating.
ACKNOWLEDGEMENTS
This work is partially supported by the Greek Sec-
retariat for Research and Technology, and the EU,
Project HealthSign: Analysis of Sign Language on
mobile devices with focus on health services T1E∆K-
01299 within the framework of “Competitiveness,
Entrepreneurship and Innovation” (EPAnEK) Opera-
tional Programme 2014-2020.
REFERENCES
Arpit, D., Jastrz˛ebski, S., Ballas, N., Krueger, D., Bengio,
E., Kanwal, M. S., Maharaj, T., Fischer, A., Courville,
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
640

A., Bengio, Y., et al. (2017). A closer look at mem-
orization in deep networks. In International Confer-
ence on Machine Learning, pages 233–242. PMLR.
Bengio, Y., Louradour, J., Collobert, R., and Weston, J.
(2009). Curriculum learning. In Proceedings of
the 26th annual international conference on machine
learning, pages 41–48.
Chapelle, O., Scholkopf, B., and Zien, A. (2009).
Semi-supervised learning (chapelle, o. et al., eds.;
2006)[book reviews]. IEEE Transactions on Neural
Networks, 20(3):542–542.
Cho, K., van Merrienboer, B., Gulcehre, C., Bahdanau, D.,
Bougares, F., Schwenk, H., and Bengio, Y. (2014).
Learning phrase representations using rnn encoder-
decoder for statistical machine translation.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In 2009 IEEE conference on com-
puter vision and pattern recognition, pages 248–255.
Ieee.
Gould, S., Fulton, R., and Koller, D. (2009). Decomposing
a scene into geometric and semantically consistent re-
gions. In 2009 IEEE 12th International Conference
on Computer Vision, pages 1–8.
Graves, A., rahman Mohamed, A., and Hinton, G. (2013).
Speech recognition with deep recurrent neural net-
works.
Hacohen, G. and Weinshall, D. (2019). On the power of
curriculum learning in training deep networks. In In-
ternational Conference on Machine Learning, pages
2535–2544. PMLR.
Han, B., Yao, Q., Yu, X., Niu, G., Xu, M., Hu, W., Tsang,
I., and Sugiyama, M. (2018). Co-teaching: Robust
training of deep neural networks with extremely noisy
labels. arXiv preprint arXiv:1804.06872.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Deep resid-
ual learning for image recognition.
Honari, S., Molchanov, P., Tyree, S., Vincent, P., Pal, C.,
and Kautz, J. (2018). Improving landmark localiza-
tion with semi-supervised learning. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition, pages 1546–1555.
Jiang, L., Zhou, Z., Leung, T., Li, L.-J., and Fei-Fei, L.
(2018). Mentornet: Learning data-driven curricu-
lum for very deep neural networks on corrupted la-
bels. In International Conference on Machine Learn-
ing, pages 2304–2313. PMLR.
Kingma, D. P. and Ba, J. (2017). Adam: A method for
stochastic optimization.
Kosmopoulos, D., Oikonomidis, I., Constantinopoulos, C.,
Arvanitis, N., Antzakas, K., Bifis, A., Lydakis, G.,
Roussos, A., and Argyros, A. (2020). Towards a vi-
sual sign language dataset for home care services. In
2020 15th IEEE International Conference on Auto-
matic Face and Gesture Recognition (FG 2020), pages
520–524. IEEE.
Li, J., Socher, R., and Hoi, S. C. (2020). Dividemix:
Learning with noisy labels as semi-supervised learn-
ing. arXiv preprint arXiv:2002.07394.
Mirzasoleiman, B., Cao, K., and Leskovec, J. (2020). Core-
sets for robust training of deep neural networks against
noisy labels. Advances in Neural Information Pro-
cessing Systems, 33.
Northcutt, C., Jiang, L., and Chuang, I. (2021). Confi-
dent learning: Estimating uncertainty in dataset labels.
Journal of Artificial Intelligence Research, 70:1373–
1411.
Panteleris, P., Oikonomidis, I., and Argyros, A. A. (2018).
Using a single rgb frame for real time 3d hand pose
estimation in the wild. In IEEE Winter Conference on
Applications of Computer Vision (WACV 2018), also
available at CoRR, arXiv, pages 436–445, lake Tahoe,
NV, USA. IEEE.
Paszke, A., Gross, S., Massa, F., Lerer, A., Bradbury, J.,
Chanan, G., Killeen, T., Lin, Z., Gimelshein, N.,
Antiga, L., Desmaison, A., Kopf, A., Yang, E., De-
Vito, Z., Raison, M., Tejani, A., Chilamkurthy, S.,
Steiner, B., Fang, L., Bai, J., and Chintala, S. (2019).
Pytorch: An imperative style, high-performance deep
learning library. In Wallach, H., Larochelle, H.,
Beygelzimer, A., d'Alché-Buc, F., Fox, E., and Gar-
nett, R., editors, Advances in Neural Information Pro-
cessing Systems 32, pages 8024–8035. Curran Asso-
ciates, Inc.
Sandler, M., Howard, A., Zhu, M., Zhmoginov, A., and
Chen, L.-C. (2019). Mobilenetv2: Inverted residuals
and linear bottlenecks.
Shorten, C. and Khoshgoftaar, T. M. (2019). A survey on
image data augmentation for deep learning. Journal
of Big Data, 6(1):1–48.
Simon, T., Joo, H., Matthews, I., and Sheikh, Y. (2017).
Hand keypoint detection in single images using mul-
tiview bootstrapping.
Song, H., Kim, M., Park, D., Shin, Y., and Lee, J.-G. (2020).
Learning from noisy labels with deep neural networks:
A survey. arXiv preprint arXiv:2007.08199.
Sun, Y. and Loparo, K. (2020). Context aware im-
age annotation in active learning. arXiv preprint
arXiv:2002.02775.
Voigtlaender, P., Luo, L., Yuan, C., Jiang, Y., and Leibe,
B. (2021). Reducing the annotation effort for video
object segmentation datasets. In Proceedings of
the IEEE/CVF Winter Conference on Applications of
Computer Vision, pages 3060–3069.
Wan, C., Probst, T., Van Gool, L., and Yao, A. (2017).
Crossing nets: Dual generative models with a shared
latent space for hand pose estimation. In Confer-
ence on Computer Vision and Pattern Recognition,
volume 7.
Zeiler, M. D. (2012). Adadelta: An adaptive learning rate
method.
Zhang, F., Bazarevsky, V., Vakunov, A., Tkachenka, A.,
Sung, G., Chang, C.-L., and Grundmann, M. (2020).
Mediapipe hands: On-device real-time hand tracking.
Zhu, X. and Ghahramani, Z. (2002). Learning from labeled
and unlabeled data with label propagation.
Exploitation of Noisy Automatic Data Annotation and Its Application to Hand Posture Classification
641
