
Disruption Management of ASAE’s Inspection Routes
Miguel Milheiro Ferreira
1,2
, Henrique Lopes Cardoso
1,2
, Lu
´
ıs Paulo Reis
1,2
, Telmo Barros
1,2
and Jo
˜
ao Pedro Machado
3
1
Laborat
´
orio de Intelig
ˆ
encia Artificial e Ci
ˆ
encia de Computadores (LIACC), Portugal
2
Faculdade de Engenharia da Universidade do Porto, Rua Dr. Roberto Frias, s/n, 4200-465 Porto, Portugal
3
Autoridade de Seguranc¸a Alimentar e Econ
´
omica (ASAE), Rua Rodrigo da Fonseca, 73, 1269-274 Lisboa, Portugal
Keywords:
Vehicle Routing, Disruption Management, Real-time Scheduling, Routes Rescheduling, Hill-climbing,
Simulated Annealing, Tabu-search, Large Neighbourhood Search.
Abstract:
The emergence of technologies capable of producing real-time data opened new horizons to planning and op-
timising vehicle routes. Dynamic vehicle routing problems (DVRPs) use real-time information to dynamically
calculate the most optimised set of routes. The typical approach is to initially calculate the vehicle routes and
dynamically revise them in real-time. This work uses the case study of ASAE, a Portuguese administrative
authority specialising in food safety and economic surveillance. The dynamic properties of ASAE’s opera-
tional environment are studied, and a solution is proposed to review and efficiently modify the precalculated
plan. We propose a weighted utility function based on three aspects: the summed utility of the inspections,
the similarity between solutions, and the arrival time. A Disruption Generator generates disruptions on the
inspection routes: travel and inspection times, vehicle and inspection breakdowns, utility changes, and unex-
pected or emerging inspections. We compare the performance of four meta-heuristics: Hill-Climbing (HC),
Simulated Annealing (SA), Tabu-Search (TS) and Large neighbourhood Search (LNS). The HC algorithm has
the fastest convergence, while SA takes longer to solve the test instances. LNS was the method with higher
solution quality, while HC provided solutions with lower utility.
1 INTRODUCTION
During the last decades, urban transportation experi-
enced a rapid and significant evolution supported by
the emergence and development of several vital tech-
nologies. On the other hand, computational power has
approximately doubled every two years since 1975
(Moore’s Law). Computational power also benefits
from new computation paradigms such as parallel
computing, since specific portions of the code are exe-
cuted in Graphics Processing Units (GPU), massively
boosting performance. These technologies and pro-
cesses bring the opportunity to improve vehicle per-
formance, mainly by optimising vehicle routes. Sev-
eral benefits can be accounted for: improved safety,
less traffic congestion, monetary savings, and reduced
environmental impact (Genders and Razavi, 2016).
The typical approach to address multi-vehicle route
planning relies on centralised control, having an in-
frastructure that gathers and combines vehicle data,
leading to more efficient and intelligent route optimi-
sations. Further optimisations can be achieved con-
cerning dynamic environment factors by using algo-
rithms that benefit from the information collected in
real-time. The evolution of communication medi-
ums eases knowledge transference between the vehi-
cle fleet and the centralised control. This work arises
from a project (Barros et al., 2020; Barros et al., 2021)
that seeks to improve the Portuguese Economic and
Food Safety Authority (ASAE) inspection activities.
ASAE’s activities are vital as they ensure competition
fairness among economic operators and improve food
safety.
The contributions of this work regard the dynamic
and real-time optimisation of inspection routes to
surveil economic operators. Any real-world vehicle
routing scenario is susceptible to disruptions – uncer-
tain events that influence an operational plan – mak-
ing a planned route unfeasible or sub-optimal. A stan-
dard paradigm to maintain feasibility and optimality
is to revise inspection routes in real-time and mod-
ify them once a disruption occurs. Such a complex
task requires the use of systems capable of collecting
the geographic position of fleet vehicles in real-time
810
Ferreira, M., Cardoso, H., Reis, L., Barros, T. and Machado, J.
Disruption Management of ASAE’s Inspection Routes.
DOI: 10.5220/0010914000003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 3, pages 810-817
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

and knowledge about the location of every economic
operator. Each economic operator to be inspected
has an associated utility, reflecting the value an in-
spection brings. The problem explored in this work
was modelled as a Dynamic Vehicle Routing Problem
with Time Windows (DVRPTW). Solving this opti-
misation problem corresponds to finding the inspec-
tion routes that bring the most utility for the system
while respecting all constraints. Such task is often
computationally intractable, and approximation tech-
niques become vital in finding a good solution in rea-
sonable time.
2 RELATED WORK
Research in the field of vehicle routing has increased
massively, with enterprises aiming to lower their costs
and increase their profits. This area has attracted
many researchers, mainly on the subject of dynamic
routing, especially in the last three decades (Psaraftis
et al., 2016). On his survey, Pillac et al. catalogued
154 references on the topic (Pillac et al., 2013).
VRPs consist of determining the set of routes to
be traversed by a vehicle fleet to serve a group of cus-
tomers or visit a set of locations (Eglese and Zam-
birinis, 2018). They were first introduced by Dantzig
and Ramser (Dantzig and Ramser, 1959). Since then,
multiple instances of the problem and algorithms to
find solutions have been described in the literature.
The most straightforward and famous vehicle routing
problem is the Traveling Salesman Problem (TSP):
Having a set of cities to visit, calculate the shortest
path, starting from an initial city, that visits each city
exactly once and then returns to the starting city (Hah-
sler and Hornik, 2007). The set of routes outputted
when solving the VRP might be impossible to execute
as some unforeseen events happen. Also, there might
be a window to optimise the pre-calculated operations
plan further.
Dynamic Vehicle Routing Problems (DVRP) are
the dynamic family of problems deriving from VRP,
where the routes can suffer the influence of dynamic
elements. The routes have to be revised and modified
in real-time. There is a panoply of factors that play
an essential role in this trend, such as hardware evo-
lution, the appearance of devices and systems that can
gather and transmit vehicle data in real-time, the ac-
cess to information APIs and the Global Positioning
System (GPS). All these data and systems can be used
and combined in real-time to gather and create useful
information that will play a crucial role in optimising
vehicle routes (Pillac et al., 2013). They enhance and
explain the decisions taken in Dynamic Routing.
Wilson and Colvin first described a DVRP formu-
lation (Wilson and Colvin, 1977). They studied the
dial-a-ride problem (DARP), where client requests
appear dynamically during execution time. They used
an insertion heuristic approach to obtain an approxi-
mate solution with low computational effort (Psaraftis
et al., 2016).
DVRPs are divided into two clusters: the Dynamic
and deterministic VRP and the Dynamic and stochas-
tic VRP. Although both variants can be considered
as dynamic, they differ in the presence of stochastic
information about dynamic events. In dynamic and
stochastic VRPs, this information is available before-
hand and may be useful to plan future decisions.
As the initially calculated plan will be modified
and revised, the costs entailed by deviations should
also be taken into account. Therefore, disruption
management is often a multi-objective problem, as
the costs of modifying the plan should be added to
the costs already present on the original plan (Eglese
and Zambirinis, 2018).
3 INSPECTION ROUTES
PROBLEM
3.1 Problem Description
ASAE is currently responsible for inspecting more
than 1.5 million economic operators in the Portuguese
territory. ASAE’s structure is segmented into three re-
gional units, each being divided into operational units,
in a total of twelve units. Operational units are de-
pots where the brigades start and finish their sched-
uled tasks. Each operational unit has a different num-
ber of available vehicles and personnel and is respon-
sible for inspecting a subset of the economic opera-
tors in the system. Each inspection is performed by
a brigade that is always capable of inspecting any
economic operator. All the economic operators are
geo-referenced and have an associated inspection util-
ity, calculated using information such as its history of
customer complaints, which are reported to ASAE.
The dynamic factors in the real-world environ-
ment that might influence the routes are manyfold. In
this work, six disruptive elements are considered: (i)
dynamic inspection times; (ii) dynamic travel times
between two sites; (iii) vehicle breakdowns; (iv) in-
spection breakdowns; (v) utility changes; and (vi) un-
expected or emerging inspections.
Disruption Management of ASAE’s Inspection Routes
811

3.2 Problem Formulation
The problem can be formulated as a Multi-depot Dy-
namic Vehicle Routing Problem with Time Windows
(MDDVRPTW). This formulation describes the vast
majority of vehicle routing problems. They usually
comprise several depots from where the vehicles are
routed. Time windows are essential, as economic op-
erators’ working schedules must be considered in case
of inspection. The approach described in this work
considers only a single operational unit and all the
economic operators under its jurisdiction.
The problem addressed in this paper is a max-
imisation problem, aiming to find the best feasible
solution according to a complex utility function (ad-
dressed in Section 3.5). We model the problem with a
finite number of constraints perceived from the real-
world scenario. The following are the most relevant
ones:
• Inspection brigades have a defined time to leave
the initial depot (operational unit) and arrive at the
same place when the workday ends, at a specified
timestamp.
• An economic operator may be inspected at most
once per operational plan, and the inspection must
start during the economic operator business hours.
• Each inspection brigade can only inspect one eco-
nomic operator at a time.
• A vehicle or brigade that has suffered a break-
down is no longer available for inspection tasks
in that workday.
• Emerging inspections are mandatory and have to
be completed prior to the workday end.
Continuous optimisation is done during the day
upon a disruption. This approach was first used in
(Gendreau et al., 1999) with an adaptation of the par-
allel Tabu-Search algorithm to solve a Dynamic VRP
with time windows, motivated by courier services.
The current problem solution is maintained in mem-
ory, being updated continuously once the available
problem information changes.
3.3 Disruption Generator
We propose and implement a system that tackles dis-
ruptions in real-time. For the purpose of this work,
“real-time” has to be simulated to allow testing the
proposed approach. A Disruption Generator artifi-
cially generates realistic disruptions that should be ad-
dressed by the algorithms. It receives an operational
plan corresponding to the set of inspection routes for
one working day and returns a new operational plan
with disruptions in the inspection routes. Six ma-
jor disruptions are considered: disruption of the in-
spection times and travel times, vehicle breakdowns,
inspection breakdowns, changes in inspection utility
and emerging inspections.
ASAE inspects economic operators from several
business sectors that can be classified into ten main
clusters. Although one can reasonably predict the in-
spection time necessary to inspect an economic oper-
ator from a specific sector, many factors can influence
these times. Travel time disruptions can be caused by
a panoply of external elements, from traffic conditions
or changes in the vehicle’s speed. They are usually
associated with delays. A Gaussian distribution was
used to sample new inspection and travel times, sim-
ulating a disruption. The two parameters to calculate
the Gaussian curve are the predicted inspection/travel
time, and a customizable deviation factor to adjust the
disruption severity.
Vehicle breakdown disruptions are common in
most VRPs and concern fleet vehicles in operation.
Any vehicle in operation can suffer a breakdown
caused by various reasons that prevents it from pro-
ceeding in its current inspection route. ASAE opera-
tions do not involve customer demands that have to be
satisfied. A system can simply re-optimise the whole
operational plan.
Inspection breakdowns are very particular to
ASAE’s operations scenario and regard unforeseen
events during inspections. Inspection breakdowns
happen when a brigade is forced to stop inspecting
an economic operator and cannot proceed with its in-
spection route.
Disruptions regarding changes in inspection util-
ity concern the utility values of the economic opera-
tors. These values can change due to micro and macro
factors. The implementation of this disruption was
based on ASAE’s ten clusters of economic activities:
the disruption implies that all economic operators per-
taining to a specific economic activity will see an in-
crease in their inspection utility.
An emerging inspection is one that has top priority
and must be performed. To simulate one such inspec-
tion, the disruption generator randomly selects one
economic operator absent in the initial operational
plan and adds it in a random place in an inspection
route. However, emerging inspections are manda-
tory and have to be completed prior to the workday
end. They can be performed by any brigade, and any
brigade is able to perform multiple inspections of this
type.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
812
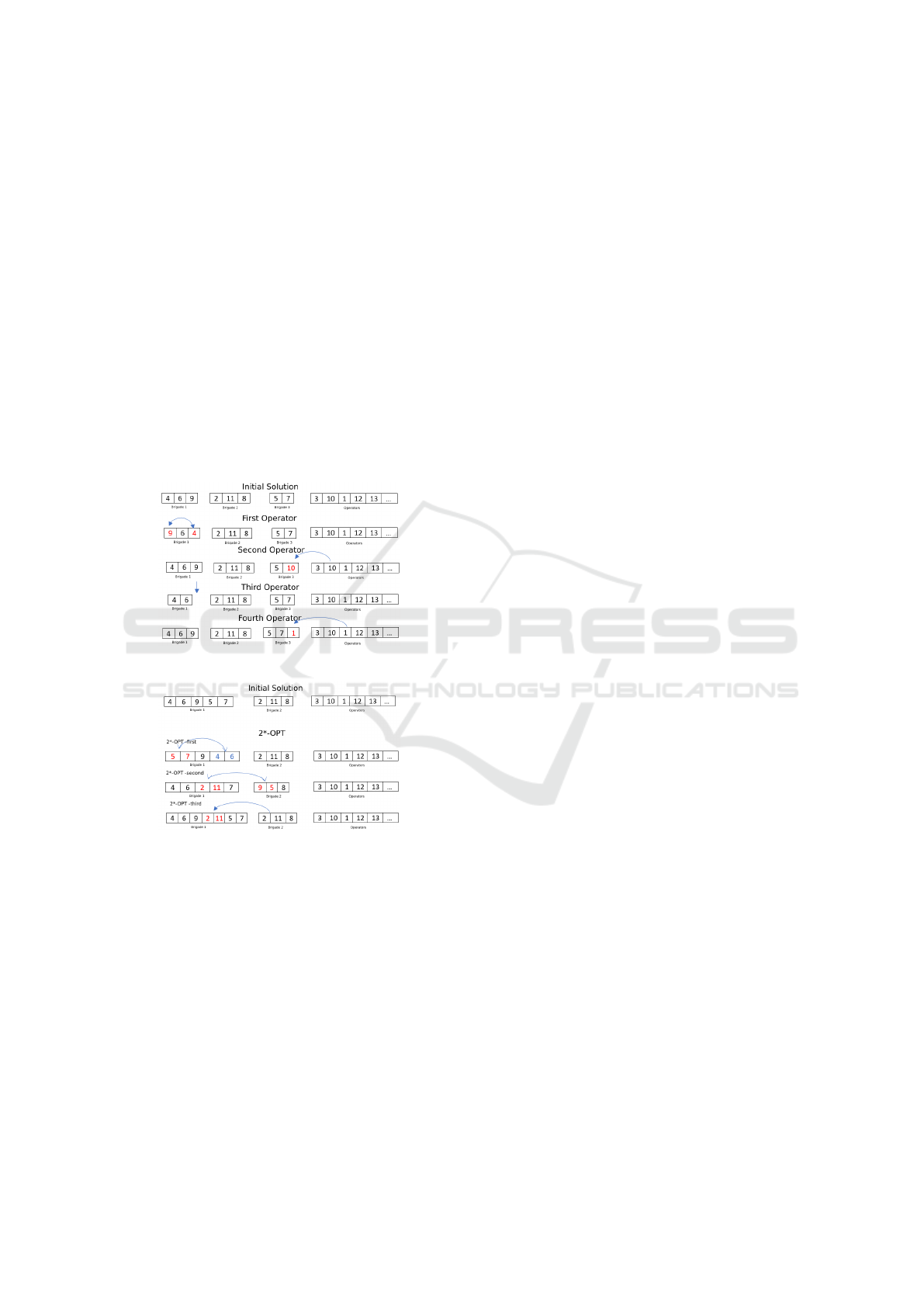
3.4 Solution Generation
The implemented algorithms imply using methods to
generate new solutions based on solutions provided as
input. For this work, six different operators were im-
plemented. These operators share the common task
of taking a solution as input and outputting a new so-
lution after changing one or more inspection routes.
The economic operators are seen as the blocks that
will be moved and altered to originate a new solution.
Each operator involves stochastic decisions to gener-
ate distinct solutions.
All operators comprise exchange, add, and re-
move operations and act both on the same or differ-
ent inspection routes. These operations can be ap-
plied to a single economic operator (Figure 1) and
over a sequence of two consecutive economic oper-
ators, dubbed 2*OPT operations (Figure 2).
Figure 1: Single Economic Operator operations.
Figure 2: 2*OPT operations.
3.5 Utility Function
The flexible utility function used in this work contem-
plates three different domains with defined weights.
The utility of a particular solution is obtained by
weighing (1) the total sum of all economic operators’
utilities, (2) the similarity between the initial solution
and the solution obtained after solving the disruption,
and (3) the average time each brigade arrives at the
depot at the work day’s end.
A key element in a dynamic vehicle routing prob-
lem is the magnitude of the changes in the routes
once disruption occurs compared to the routes ini-
tially calculated. These changes entail added costs
that may sometimes outcome the savings achieved by
re-optimising the routes once disruptions occur. The
similarity between any two corresponding routes in-
creases as they encompass the same number of eco-
nomic operators, and the economic operators visited
by the corresponding routes in the initial and posterior
solution are equal and inspected in the same order.
Each economic operator registered in the system
has an individual utility value that determines how de-
sirable it is to be inspected and its value to ASAE’s
inspection system. This value ranges from 0 to 1 and
is calculated based on a weighted sum of n functions
that take into consideration the following attributes
(Barros et al., 2021): (i) the economic operator’s ac-
tivity sector. (ii) the number and severity of pending
complaints; and (iii) its history of inspections.
The last parameter in the utility function is the
time each brigade arrives at the depot at the end of
the day. Solutions totaling more utility gathered from
inspections are not necessarily better, as they might
entail that brigades arrive too close to the maximum
allowed time, leaving less margin for disruptions.
3.6 Unfeasible Solutions
This work explores unfeasible solutions as they might
accelerate discovering new solutions on some algo-
rithms and contribute to faster convergence. Since the
problem is modelled as a DVRP, disruptions can often
make inspection routes unfeasible, so it is vital to have
an approach that weighs these solutions. Unfeasible
solutions do not fulfil one or more of the problem’s
restrictions (see Section 3.2).
In order for the algorithm to distinguish and weigh
each solution, unfeasible ones have to be penalised
in the utility function. This work uses a continuous
non-stationary penalty function (Liu and Lin, 2007).
The complex penalty function in Eq. 1 is divided into
two functions: a dynamic function f (x) (Eq. 2) and a
continuous assignment function H(x) (Eq. 3) that can
address both linear and non-linear constraints.
F(x) = f (x) −C(k)H(x) (1)
Eq. 1 was adapted to a maximisation problem.
This equation returns the new utility value after ap-
plying the respective penalty values to unfeasible so-
lutions. Function f (x) is the utility value of a spe-
cific solution calculated using the utility function pre-
viously proposed.
C(k) = (c × k)
α
(2)
The dynamic function in Eq. 2 depends on the iter-
ation number k and increases as the search progresses.
Disruption Management of ASAE’s Inspection Routes
813

c and α are two problem-dependent constants manu-
ally tuned to the values of 0.05 and 1, respectively.
H(x) =
m
∑
i=1
[θ(q
i
(x)) × q
i
(x)
ρ(q
i
(x))
] (3)
Function H(x) (Eq.3) represents the penalty fac-
tor. This function will be the sum of all the penalty
types applied to a particular solution. Function q
i
(x)
is a numeric value representing how far a solution is
from the feasible space for one penalty type. Function
ρ(q
i
(x)) adjusts the violating function and is set either
for the value one when a solution is near the feasible
space or two otherwise.
θ(q
i
(x)) = a × (1 −
1
ε
q
i
(x)
) + b (4)
Function θ(q
i
(x)) (Eq. 4) is a continuous assign-
ment function also adapted from Liu and Lin (Liu
and Lin, 2007). In this work, a and b are problem-
dependent constants adjusted to the values of 150 and
1, respectively.
3.7 Algorithms
This work implements and compares the performance
of four distinct meta-heuristic optimisation algo-
rithms: Hill-Climbing, Simulated Annealing, Tabu-
Search, and Large Neighbourhood Search.
3.7.1 Hill-Climbing
The Hill-Climbing (HC) algorithm has the most
straightforward implementation. The algorithm starts
with a preliminary solution that can be feasible or
unfeasible, representing the several inspection routes
composing an operational plan. The algorithm fol-
lows the same logic in each iteration, first generat-
ing a new candidate solution based on the current one
(using one of the operators described previously), and
then evaluating its utility using the proposed utility
function. A candidate solution is accepted if it has
better utility than the best solution found during the
previous search iterations.
3.7.2 Simulated Annealing
The Simulated Annealing (SA) algorithm is an al-
gorithm that allows the acceptance of worse solu-
tions to avoid getting trapped in local maximum.
The algorithm’s initial temperature is chosen using
a method adapted from Atiqullah (Atiqullah, 2004).
This method creates a normal distribution of ten thou-
sand neighbours and calculates the standard deviation
to be later used in Eq. 5.
~
∆C =
∑
n
attempts
i=1
|∆C
i, j
|
n
attempts
(5)
The cooling schedule used in this implementation
is an adaptation of the parametric cooling schedule
used by Atiqullah (Atiqullah, 2004). The final tem-
perature was set to 0.0001, and the values for the
constants a and b were assigned to a = 2 and b =
1/3. Two new temperature rules were implemented to
complement the proposed cooling schedule and based
on the two phases of a SA search, global position-
ing, and solution refinement. In the global positioning
phase, the temperature remains at its max for 5% of
the total number of iterations allowed. To better ad-
dress the solution refinement phase, the temperature is
set to a null value, only accepting the best solutions.
The stopping criteria used for the algorithm results
from the combination of a defined number of itera-
tions and a defined number of Markov chains without
improvement.
t
k
= t
0
× α
−[
1
f
]
b
(6)
b =
P
Q
(7)
P = log
log(
t
0
t
f
)
log(a)
!
(8)
Q = log
1
f
(9)
This work implements a reheating method that
restarts the search process a defined amount of times,
with the initial solution and temperature. If the solu-
tion from one reheat was better, the best global solu-
tion is updated.
3.7.3 Tabu-search
The Tabu-search (TS) implementation results from
a combination of methods analysed in the litera-
ture. This work implements a diversification strat-
egy where solutions are generated by prioritising less
frequent solution elements and intensification phases
where the search might restart from an elitist solution
(Cordeau and Laporte, 2005).
The proposed implementation comprises three
different memory structures: two short-term (tabu-
lists) to store tabu operations for the next N-iterations
(exchange and addition/removal operations) and one
long-term to store the frequency of solution elements.
The solution generation method generates and
evaluates the utility of a subset of the neighbourhood
with 100 elements obtained randomly from the cur-
rent solution using a set of operators. Six operators
are used with an equal frequency for this purpose.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
814

Two Aspiration criteria were implemented. A tabu
solution is accepted if its utility is higher than the best
solution’s utility. The second Aspiration criterion ver-
ifies if the utility of a new solution generated by a tabu
move is higher than the utility of the solution gener-
ated by the same move in a past iteration.
3.7.4 Large Neighbourhood Search
Large Neighborhood Search (LNS) was implemented
jointly with Tabu-search. This algorithm minimises a
large neighbourhood of solutions into a small neigh-
bourhood (Shaw, 1998; Azi et al., 2014). In this prob-
lem’s context, the building blocks of a solution are the
inspection routes since they are independent.
In each iteration, the algorithm fixes a number
of inspection routes, meaning they will not take part
in the optimisation process in that iteration. Only
two inspection routes will be optimised in each al-
gorithm’s iteration, facilitating the search for prob-
lems with many brigades. A TS solves the artificial
sub-problem instance, returning a solution that is ap-
pended with the remaining routes rebuilding the orig-
inal solution. This LNS implementation always starts
with a feasible solution. A TS instance is used when
the initial solution is unfeasible.
4 RESULTS
This work performs all the executions in the same
problem instance, adapted from a real-world scenario.
The problem instance analysed is a sub-problem of
the real-world environment with fewer inspection
routes and economic operators. A single depot is
used. The static parameters used in the tests are:
• Operational unit: Unidade Operacional III - Mi-
randela, district of Braganc¸a.
• All economic operators belong to the this opera-
tional unit, totaling 532 different operators.
• Brigades start working at 8 am and finish at 6 pm.
• As initial solution, four inspection routes are con-
sidered, generated by Barros’s approach (Barros
et al., 2021) using several metaheuristic methods.
• The inspection time is 1 hour.
Each test result corresponds to the average met-
rics of three system runs with the same conditions.
The tests were executed using an Intel i7 8700, with
16 GB RAM, running Windows 10. Several metrics
are studied: the average utility of economic opera-
tors inspected, the utility of economic operators in the
best solution found, the average value of the utility
function, the utility function value of the best solution
found, the average similarity ratios, the average and
minimum time to get the best solution, the average
iteration counter to get the best solution, the average
number of economic operators in the best solution.
4.1 Algorithm Comparison
The first experiment has the main objective of making
a raw comparison between the four algorithms. The
utility function used in this test is the economic opera-
tor’s utility gathered by the inspections. The only dis-
ruptions generated for these tests are travel time and
inspection time disruptions. The algorithms are exe-
cuted for thirty seconds, two and five minutes, while
the number of brigades (and thus number of inspec-
tion routes) is two, three and four. All the tests results
are shown in Table 1. A string identifies each test. The
first sub-string identifies the number of brigades, the
second represents the algorithm used, and the last rep-
resents the execution time. The tests using the LNS
with two inspection routes are discarded since the re-
sults were expected to be the same as with TS.
Regarding run times, SA performs worse since it
spends a significant time in the exploratory phase. HC
finds the best solution in the shortest execution time,
scoring the best execution time in five out of nine
tests. TS comes next, scoring the best execution time
in four out of nine tests. HC performs the worse in
terms of solution quality, having the lowest average
solution utility in eight out of the nine tests. However,
it can still find reasonable solutions since its execu-
tion depends on stochasticity. For problem instances
with two inspection routes, the TS algorithm finds the
highest utility solutions and the highest average solu-
tion utility. For larger problem instances with more
inspection routes, LNS revealed to be the best algo-
rithm to find the best solutions consistently.
4.2 Disruption Types Comparison
This test section studies how the different algorithms
respond to the various disruptions types. The util-
ity function comprised 2 components with a weight
of 0.66 for the utility sum of all the inspected eco-
nomic operators and 0.33 for solution similarity (see
Section 3.5). Algorithm execution time is topped at
4 minutes. The initial operational plan is composed
of four inspection routes. All the tests and results are
shown in Table 2 and Table 3.
SA provides solutions with a poor similarity ratio.
Other algorithms balance utility gathering with keep-
ing the solution relatively similar to the initial opera-
tional plan, obtaining solutions that are roundly 30%
Disruption Management of ASAE’s Inspection Routes
815

Table 1: Algorithm comparison. UA: sum of economic op-
erator utilities; ST: search execution time; OP: number of
economic operators.
ID avg UA avg ST avg OP
2-HC-30 7.87 11.45 17.67
2-SA-30 8.25 21.83 17.33
2-TS-30 8.24 13.33 17.00
2-HC-2 7.28 17.16 18.00
2-SA-2 8.22 66.87 16.33
2-TS-2 8.30 10.50 18.00
2-HC-4 7.26 37.49 18.33
2-SA-4 8.29 194.38 17.00
2-TS-4 8.30 25.60 17.67
3-HC-30 9.90 22.74 27.67
3-SA-30 10.69 29.15 25.00
3-TS-30 10.53 19.23 27.00
3-LNS-30 10.53 32.84 26.00
3-HC-2 10.52 34.78 27.00
3-SA-2 10.75 100.43 25.00
3-TS-2 10.79 35.49 26.33
3-LNS-2 10.72 104.57 26.00
3-HC-4 10.19 31.39 28.00
3-SA-4 10.74 147.56 25.00
3-TS-4 10.77 141.06 25.67
3-LNS-4 11.50 153.64 28.33
4-HC-30 12.46 19.85 37.33
4-SA-30 12.91 33.95 35
4-TS-30 12.71 20.58 35.33
4-LNS-30 12.80 32.44 35
4-HC-2 12.83 78.32 36.33
4-SA-2 12.93 109.19 33.66
4-TS-2 12.81 33.50 36.00
4-LNS-2 12.95 95.07 34.33
4-HC-4 12.53 78.81 36.00
4-SA-4 13.17 148.90 35.33
4-TS-4 12.97 202.92 35.33
4-LNS-4 13.92 116.60 34.33
similar to the original one. All tests with emerging in-
spections have a substantially higher utility since they
have higher utilities.
HC quickly finds the best solution, while SA per-
forms worse on this metric. TS and LNS have simi-
lar average time intervals. HC fails to solve two out
of the three problem instances involving emerging in-
spections, outputting unfeasible solutions. The algo-
rithm seems to get stuck in the initial solution, having
difficulty progressing in the search. An algorithm like
HC is unsuitable for solving such disruption since it
does not allow worse solutions, not allowing emerg-
ing inspections to be readjusted freely in the plan.
Tests involving inspection and vehicle break-
downs have a lower utility since less brigades are
working. The solutions obtained in solving a problem
instance with changes in utility usually include more
economic operators of the affected activity sector.
The current implementation of LNS influences the
algorithm’s performance to solve emerging inspec-
tions. Economic operators corresponding to emerg-
ing inspections cannot be exchanged between routes
as easily compared to other implementations, as only
2 routes are optimised in each iteration.
5 CONCLUSIONS
This work proposes a valid approach to tackle disrup-
tions in a DVRP scenario. It culminated in imple-
menting a system capable of generating and address-
ing disruptions to a set of inspection routes. Overall,
the algorithms provided reasonable solutions in most
of the tests. HC has the fastest convergence and fails
to address the emerging inspections. SA fails to de-
liver solutions with higher similarity ratios. TS of-
fered an outstanding balance between finding the best
solution and in the shortest amount of time. TS also
solved all problem instances and returned solutions
similar to the initial ones when the utility function
benefits such behaviour. LNS consistently offered a
better solution quality when compared to other algo-
rithms. Nevertheless, this algorithm is sub-optimal
compared to SA and TS when solving the emerging
inspections disruption.
A further enhancement of the process can be ob-
tained by dividing the optimisation process into two
stages: to quickly get a reasonable solution and then
optimizing it to produce a better solution(Ritzinger
et al., 2016). Stochastic information can be used to
further adapt the initial solution to dynamic elements
that are likely to happen during the execution of the
planned routes. Methods such as sampling (Pillac
et al., 2013) could be used.
ACKNOWLEDGEMENTS
This work is supported by project IA.SAE, funded
by Fundac¸
˜
ao para a Ci
ˆ
encia e a Tecnologia (FCT)
through program INCoDe.2030. This research is
supported by LIACC (FCT/UID/CEC/0027/2020).
Telmo Barros is supported by a PhD scholarship from
FCT (2021.05064.BD).
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
816
Table 2: Tests identification and parameters - Experiment 2; Alg stands for the corresponding algorithm initials.
ID Algorithms Disruption Type Dis Param Value
Alg-IT HC, SA, TS, LNS Inspection Time Disruption Strength 5
Alg-TT HC, SA, TS, LNS Travel Time Disruption Strength 5
Alg-VB HC, SA, TS, LNS Vehicle Breakdown No. Vehicles 1
Alg-UC HC, SA, TS, LNS Utility Changes Econ. Operator class III,V,VI
Alg-IB HC, SA, TS, LNS Inspection Breakdown No. Inspections 1
Alg-EI HC, SA, TS, LNS Emerging inspections No. Inspections 2
Table 3: Disruption management results. UF: utility func-
tion, UA: sum of economic operator utilities, Sim: solution
similarity.
ID avg UF avg UA avg Sim
HC-IT 13.09 11.55 0.22
SA-IT 12.88 12.88 0.00
TS-IT 13.51 11.15 0.34
LNS-IT 14.27 12.62 0.24
HC-TT 12.93 11.48 0.21
SA-TT 12.98 12.98 0.00
TS-TT 12.99 10.66 0.33
LNS-TT 13.04 10.80 0.31
HC-VB 10.74 9.67 0.20
SA-VB 10.76 10.76 0.00
TS-VB 10.72 9.30 0.270
LNS-VB 10.64 9.96 0.21
HC-UC 10.47 9.88 0.11
SA-UC 10.90 10.90 0.00
TS-UC 10.80 9.69 0.21
LNS-UC 10.70 9.47 0.23
HC-IB 13.57 11.75 0.26
SA-IB 12.89 12.89 0.00
TS-IB 13.77 11.58 0.31
LNS-IB 13.56 11.10 0.35
HC-EI -44.00 204.67 0.69
SA-EI 212.94 212.43 0.07
TS-EI 212.98 210.60 0.34
LNS-EI 211.99 209.37 0.37
REFERENCES
Atiqullah, M. M. (2004). An efficient simple cooling sched-
ule for simulated annealing. Lecture Notes in Com-
puter Science (including subseries Lecture Notes in
Artificial Intelligence and Lecture Notes in Bioinfor-
matics), 3045:396–404.
Azi, N., Gendreau, M., and Potvin, J.-Y. (2014). An adap-
tive large neighborhood search for a vehicle routing
problem with multiple routes. Computers I& Opera-
tions Research, 41:167–173.
Barros, T., Oliveira, A., Cardoso, H. L., Reis, L. P.,
Caldeira, C., and Machado, J. P. (2021). Economic
and food safety: Optimized inspection routes genera-
tion. In Rocha, A. P., Steels, L., and van den Herik, J.,
editors, Agents and Artificial Intelligence, pages 482–
503, Cham. Springer International Publishing.
Barros, T., Santos, T., Oliveira, A., Cardoso, H. L., Reis,
L. P., Caldeira, C., and Machado, J. P. (2020). In-
teractive inspection routes application for economic
and food safety. In Rocha,
´
A., Adeli, H., Reis, L. P.,
Costanzo, S., Orovic, I., and Moreira, F., editors,
Trends and Innovations in Information Systems and
Technologies, pages 640–649, Cham. Springer Inter-
national Publishing.
Cordeau, J.-F. and Laporte, G. (2005). Tabu search heuris-
tics for the vehicle routing problem. In Sharda, R.,
Voß, S., Rego, C., and Alidaee, B., editors, Meta-
heuristic Optimization via Memory and Evolution:
Tabu Search and Scatter Search, pages 145–163.
Springer US, Boston, MA.
Dantzig, G. B. and Ramser, J. H. (1959). The Truck Dis-
patching Problem. Management Science, 6(1):80–91.
Eglese, R. and Zambirinis, S. (2018). Disruption manage-
ment in vehicle routing and scheduling for road freight
transport: a review. Top, 26(1):1–17.
Genders, W. and Razavi, S. N. (2016). Impact of Connected
Vehicle on Work Zone Network Safety through Dy-
namic Route Guidance. Journal of Computing in Civil
Engineering, 30(2):04015020.
Gendreau, M., Guertin, F., Potvin, J.-Y., and Taillard, E.
(1999). Parallel tabu search for real-time vehicle rout-
ing and dispatching. Transportation Science, 33:381–
390.
Hahsler, M. and Hornik, K. (2007). TSP - Infrastructure for
the traveling salesperson problem. Journal of Statisti-
cal Software, 23(2):1–21.
Liu, J. L. and Lin, J. H. (2007). Evolutionary computa-
tion of unconstrained and constrained problems using
a novel momentum-type particle swarm optimization.
Engineering Optimization, 39(3):287–305.
Pillac, V., Gendreau, M., Gu
´
eret, C., and Medaglia, A. L.
(2013). A review of dynamic vehicle routing prob-
lems. European Journal of Operational Research,
225(1):1–11.
Psaraftis, H. N., Wen, M., and Kontovas, C. A. (2016). Dy-
namic vehicle routing problems: Three decades and
counting. Networks, 67(1):3–31.
Ritzinger, U., Puchinger, J., and Hartl, R. F. (2016). A sur-
vey on dynamic and stochastic vehicle routing prob-
lems. International Journal of Production Research,
54(1):215–231.
Shaw, P. (1998). Using constraint programming and local
search methods to solve vehicle routing problems. In
Maher, M. and Puget, J.-F., editors, Principles and
Practice of Constraint Programming — CP98, pages
417–431. Springer Berlin Heidelberg.
Wilson, N. and Colvin, N. (1977). Computer Control of the
Rochester Dial-A-Ride System. CTS report. MIT.
Disruption Management of ASAE’s Inspection Routes
817
