
Design of an Autonomous Distributed Multi-agent Mission Control
System for a Swarm of Satellites
Petr Skobelev
1,2 a
, Gennady Myatov
1
, Vladimir Galuzin
1b
, Anastasia Galitskaya
3c
,
Anton Ivanov
4d
and Aleksandr Chernyavskii
5
1
Samara State Technical University, 244, Molodogvardeyskaya st., Samara, 443100, Russian Federation
2
Samara Federal Research Center of the Russian Academy of Sciences, Institute for the Control of Complex Systems of
Russian Academy of Sciences, 61, Sadovaya st., Samara, 443020, Russian Federation
3
Knowledge Genesis, Skolkovo Innovation Center, 42, Bolshoy Boulevard st., Moscow, 121205, Russian Federation
4
Skolkovo Institute of Science and Technology, Skolkovo Innovation Center, 30/1, Bolshoy Boulevard,
Moscow, 121205, Russian Federation
5
RSC Energia, 4A, Lenina st., Korolev, Moscow region, 141070, Russian Federation
alexander.cherniavsky2012@yandex.ru
Keywords: Satellite, Ground Station, Object of Observation, Inter-satellite Communication, Multi-agent Technology,
Autonomous Control.
Abstract: The paper describes an autonomous distributed multi-agent system for mission control of a multi-satellite
swarm, using direct data exchange between satellites in space via a radio channel to make coordinated
collective decisions. The main advantage of autonomous control on board the vehicle is the ability to use the
current data on its state to quickly respond to events in real time, without having to wait for a response or
instructions from the Earth. The proposed approach develops the principles of creating self-organizing
systems and is supposed to be implemented in several stages of the space mission. The first stage consists in
conducting experiments on the use of inter-satellite interaction in order to assess and clarify the possibility of
performing and correcting the plan of operations built on the ground with account of the current telemetry
data obtained in real time. At the second stage, it is planned to use more powerful on-board computers and
organize fully autonomous control in a mesh network formed by the satellites for a distributed solution of the
observation problem, surveying a given area in the interests of ecology and solving other problems requiring
coordinated interaction of devices. In this regard, this paper presents a refined brief problem statement for
planning the work of a multi-satellite swarm in relation to the previously considered one. A brief description
of the developed system is given, which makes it possible to implement processing applications for
performing space experiments by means of the ground circuit and resources of the space constellation. The
paper also presents the structure and functions of the autonomous multi-agent system and protocols of agent
interaction, as well as models and methods of multi-agent group management. Prospects for further
development and practical application of the approach are discussed.
1 INTRODUCTION
The current level of development of computing
equipment and technologies for inter-satellite
communication makes it possible to come close to the
possibility of creating the so-called "Swarm of
a
https://orcid.org/0000-0003-2199-9557
b
https://orcid.org/0000-0002-1460-613X
c
https://orcid.org/0000-0002-7752-4262
d
https://orcid.org/0000-0001-8376-8581
satellites". This self-organizing group is
fundamentally different from the usual swarm
because each satellite can make independent
decisions and directly interact with others for
development, assessment, approval, adoption and
implementation control of decisions. To create the
swarm of satellites, it is proposed to organize a
408
Skobelev, P., Myatov, G., Galuzin, V., Galitskaya, A., Ivanov, A. and Chernyavskii, A.
Design of an Autonomous Distributed Multi-agent Mission Control System for a Swarm of Satellites.
DOI: 10.5220/0010917400003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 1, pages 408-416
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

common mesh network and use multi-agent
technologies for intelligent interaction through
exchange of messages via the Contract Net Protocol
(Zhang, 2019).
The purpose of creating such intelligent orbital
constellations is efficient and guaranteed provision of
data obtained from space to the user. In particular, the
Earth remote sensing (ERS) data which is used for
environmental and agricultural monitoring (Shimoda,
2016). A consequence of the increased interest in
space observations is a significant increase in the
number of requests and requirements for efficiency of
their servicing. This leads to the need for dynamic
adaptive adjustments to the operating schedule of the
swarm as new applications arrive, as well as in case
of unpredictable events related to equipment failure
or rapidly changing meteorological conditions.
Application of traditional methods of control based
only on the ground control loop and traditional
planning methods turns out to be ineffective.
Attempts have already been made to implement
the concept of autonomous planning and inter-
satellite communication. For example, in 2015, Biros
satellites were launched, on board of which images
can be processed, which makes it possible to
determine cloudiness, as well as identify certain types
of objects and events, allowing users to adjust the
plan of operations based on the current target
situation (Lenzen, 2014). A year earlier, the
DEIMOS-2 satellite was launched, on board of which
a similar task can be solved (Tonetti, 2015). Another
example is an attempt to implement the scenario of
information interaction within a cluster of eight
satellites within the EDSN mission (Hanson, 2014).
It is proposed to implement this approach in
several stages of a space mission. At the first stage,
planning of space experiments is carried out by a
multi-agent system on Earth. Implementation of a
prototype multi-agent system for this stage was
described by the authors in the paper (Skobelev,
2021). At the same time, on board each satellite there
is an autonomous intelligent control system (AIS)
with auto-glider functions. The action plan built on
the ground is transmitted to AIS as a proposal for
consideration. Based on the analysis of the current
situation, each satellite checks the plan feasibility
based on available factual data. If it is impossible to
fulfill it, it starts negotiations with other satellites of
the group on transferring part of its tasks to them.
Results of these negotiations are transmitted to the
ground, where they are used to clarify the status and
work plans of each satellite. As a result, a digital twin
of the satellite swarm functions on the ground, which
reflects the state of each satellite in space and its plan,
and which can be used for advanced modeling of
various unforeseen events.
At the second stage, adaptive scheduling of the
flow of tasks directly on board is to be performed,
followed by ground control of planning results.
The project is being implemented with the support
of Roscosmos and commissioned by RSC Energia in
a consortium of 18 leading Russian universities. The
main contractor for the project is the Samara State
Technical University. During the project, it is planned
to launch from the International Space Station four
3U CubeSats to analyze neutron stars, and then six 6U
CubeSats equipped with Earth remote sensing
sensors. The timeframe of the project is 2021-2024.
The paper is structured as follows. In the second
chapter, a brief problem statement for adaptive
scheduling of operations for an autonomous multi-
satellite orbital constellation is given. The third
chapter describes the current state of research and
development on this problem. The fourth chapter
contains the architecture of the system with
description of subsystems and functions of its main
modules. In the fifth chapter, the proposed adaptive
planning method based on multi-agent technology is
described. The sixth chapter considers intermediate
results obtained and discusses possible applications
and development prospects.
2 PROBLEM STATEMENT
The generalized task of planning execution of
operations in a multi-satellite swarm can be
represented in the following way. Let there be a
simplified model of the space system (SS), which is a
combination of two segments: a space complex, the
main task of which is to collect and transmit
information, and a ground-based special complex,
which receives and processes the transmitted data.
The space complex consists of a set of satellites
S = {s
i
},i=1, 𝐿 . Each satellite s
i
is characterized by a
set of orbital elements and parameters of its onboard
equipment (battery, memory, transmitting and
receiving antennas, payload, etc.). The ground-based
complex is represented by a plurality of information
receiving stations (ground stations, GS) 𝐺
=
𝑔
,𝑟=1,𝑅
and mission control centers
(MCC)𝐶
=
𝑐
,𝑣=1,𝑉
. Each station 𝑔
and each
MCC 𝑐
are characterized by their geographic
location and parameters of installed antenna. The
main difference between GS and MCC is that usually
ground stations are equipped with an antenna that
receives data from payload, whereas a receiving-
Design of an Autonomous Distributed Multi-agent Mission Control System for a Swarm of Satellites
409

transmitting control antenna complex is installed in
MCC. Restrictions may be indicated in the form of a
work schedule and intervals of unavailability.
The space system must ensure fulfillment of a set
of applications for collection of information about a
certain object of observation (OO) 𝑂=𝑜
, 𝑝 =
1, 𝑃
), which can be located both on the Earth and in
the space. For the application o
p
, its cost (cost
p
) and a
set of restrictions are indicated: the time until which
it is necessary to obtain data about the object 𝑡
,
and the minimum quality of the collected data minQ
p
.
The composition of the application set is not
completely known in advance and changes during
system operation. Depending on the type of
application, several satellites can be involved in its
execution at once. For example, for distributed
observation of stars, two or three satellites must be
aimed at one star at a given time.
In the considered model, the system of satellites
performs the following operations:
• receiving the flight assignment from the
MCC sReceiv
j
.
• battery charging charge
j
.
• OO surveying imaging
j
,
• transfer of results to GS drop
j
.
The scope of operations may vary depending on
the task being performed and the equipment installed.
Ground stations perform one operation - receiving
data from satellite gReceiv
j
. The MCC also performs
one operation - sending a flight mission to the
satellites dispatch
j
. Each of the presented operations
op
j
is characterized by an execution interval 𝑡
=
[𝑡
; 𝑡
].
To implement target functioning of the satellite
swarm, it is necessary to provide adaptive scheduling
of incoming applications by redistributing them
between the devices in order to increase SS
performance, obtain data on the maximum quality of
OO, minimize the time required to complete
individual applications and ensure fulfillment of other
criteria. The objective function (OF) of the system has
the following form:
𝑂𝐹 =
∑
𝑂𝐹
→𝑚𝑎𝑥
,
(1)
𝑂𝐹
=
∑
𝑐
𝐹
→𝑚𝑎𝑥,
(2)
where OF is the system’s objective function,
𝑂𝐹
is the OF of the k-th application,
S is the total number of applications,
N is the number of placed applications,
M is the number of optimization criteria,
𝑐
is the weight coefficient of the m-th optimization
criterion, such that 0≤𝑐
≤1,
∑
𝑐
=1
,
𝐹
is the estimate of the m-th optimization criterion
for the k-th application.
Minimization of the imaging time 𝐹
(3) and
maximization of the quality of images 𝐹
(4) have
been chosen as optimization criteria in this work.
𝐹
=
𝑡
−𝑡
𝑡
− 𝑡
,
(3)
𝐹
=
𝑚𝑎𝑥𝑄
− 𝑞
𝑚𝑎𝑥𝑄
– 𝑚𝑖𝑛𝑄
(4)
3 REVIEW OF REFERENCES
To date, there has been a fairly large number of works
devoted to solving the problem of planning the target
application of multi-satellite SS. These papers usually
describe the traditional ground-based option for
drawing up the plan. However, recently there have
begun to appear works in which planning is partially
or completely carried out on board the satellite. The
methods for solving this problem are mainly based on
linear integer programming and various kinds of
heuristics to reduce the enumeration. However,
differences in description of the problem statements
of the considered approaches are making it difficult
to compare their performance and effectiveness.
In particular, linear programming methods as a
way to solve this problem are considered in (Wang,
2016). Results of these experimental studies show the
possibility of solving the problem in relation to a
multi-satellite swarm. However, objective functions
used in them imply optimization according to only
one criterion, and the planning duration grows
exponentially with an increase in the dimension of
input data, i.e. the number of applications and the
number of satellites.
A number of works consider the use of heuristic
and metaheuristic algorithms previously tested on
classical problems of planning and resource
allocation, such as the ant algorithm (He, 2019), the
local search method (He, 2018), and the genetic
algorithm (Hosseinabadi, 2017). Although heuristic
algorithms show better performance than linear
programming methods, their centralized approach
makes them impossible to apply for distributed
computing in the satellite networks in real time.
Application of a multi-agent approach to planning
the operation of a swarm of satellites is considered in
(Bonnet, 2015) and (Phillips, 2019), but only within
the framework of the ground contour. As
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
410

prerequisites for application of the multi-agent
approach, the advantages of self-adaptation and self-
organization are given in relation to multi-criteria
problems of large dimensions that require dynamic
adaptation of the plan in case of abnormal events. In
the works (Song, 2018), (Tonetti, 2015) and (Chu,
2017) approaches to fully autonomous planning are
considered. However, the presented solutions are
limited to one device, not solving the problem of
organizing distributed computing and implementing
messaging within the orbital constellation. The work
(Picard, 2021) discusses the idea of fully autonomous
multi-agent planning, however, specific algorithms
and protocols for interaction of vehicles in orbit, as
well as obtained results, are not provided.
This review of references has shown that the
currently available methods of planning are mainly of
a centralized, hierarchical and monolithic nature, and
are designed to be used only in the ground-based
planning method. Methods and algorithms for
autonomous planning on board a satellite, with
support for interaction between them, are just starting
to appear. However, they are limited by only one
satellite and cannot be upscaled for the orbital
constellation. Thus, efficient and scalable solutions to
the problem of autonomous planning for target
application of multi-satellite swarms, suitable for
practical digital implementation, are currently not
presented in the scientific literature.
4 SYSTEM ARCHITECTURE
The architecture of the developed system is shown in
Figure 1. It consists of a ground control subsystem,
concentrated in the MCC, connected to the global GS
network, as well as an orbital planning subsystem,
represented by a set of AIS on board each satellite.
The ground control subsystem includes the
following main software modules:
• Planning module - designed for adaptive
scheduling and rebuilding of the schedule in
response to external changes in the initial
data by simulating the interaction of satellites
in orbit. A detailed description of the multi-
agent planning method implemented in this
module is given in (Skobelev, 2021).
• Ontology and knowledge base - to
accumulate and formalize current knowledge
about the subject area, which is used in
planning and management.
• Database is subject-oriented and provides
long-term storage of initial data and planning
results.
• Digital twin of satellite is a computer model,
replenished with data on the real state of each
device.
• Service of accounting system for interaction
of other parts of the system with the database
server.
• User interface provides the ability to enter
applications, manage the progress of
planning, monitor resources, view reports
and planning results.
Whereas, the onboard AIS of each satellite must
include the following main software modules:
• Intelligent control module allows users to
process applications from the MCC and other
satellites, plan operations, and coordinate
decisions. The intelligent control module is
implemented on the basis of multi-agent
technologies and includes the following main
elements:
- Scheduler that includes an agent
repository - a system module that
accumulates the created agents, and
scheduling algorithms – a set of
algorithms responsible for managing
the progress of planning and agent
behavior in accordance with the current
context.
- Event processing service is responsible
for interaction of the scheduler with
other parts of the system by performing
appropriate actions in response to
emerging external and internal events.
- Placement calculation service provides
generation of the space of possible
search options at the request of the
scheduler.
• Ontology and knowledge base is a simplified
version of the knowledge base from the
ground control system, used to make control
decisions, reschedule tasks and diagnose the
state of onboard systems within the swarm of
satellites.
• Communication module for negotiations with
other satellites in the mesh network mode.
• Satellite self-diagnostics module makes it
possible to evaluate and predict its condition.
• Image processing module is designed
to process and analyze information obtained
during observation, in order to solve the
target problem.
Design of an Autonomous Distributed Multi-agent Mission Control System for a Swarm of Satellites
411
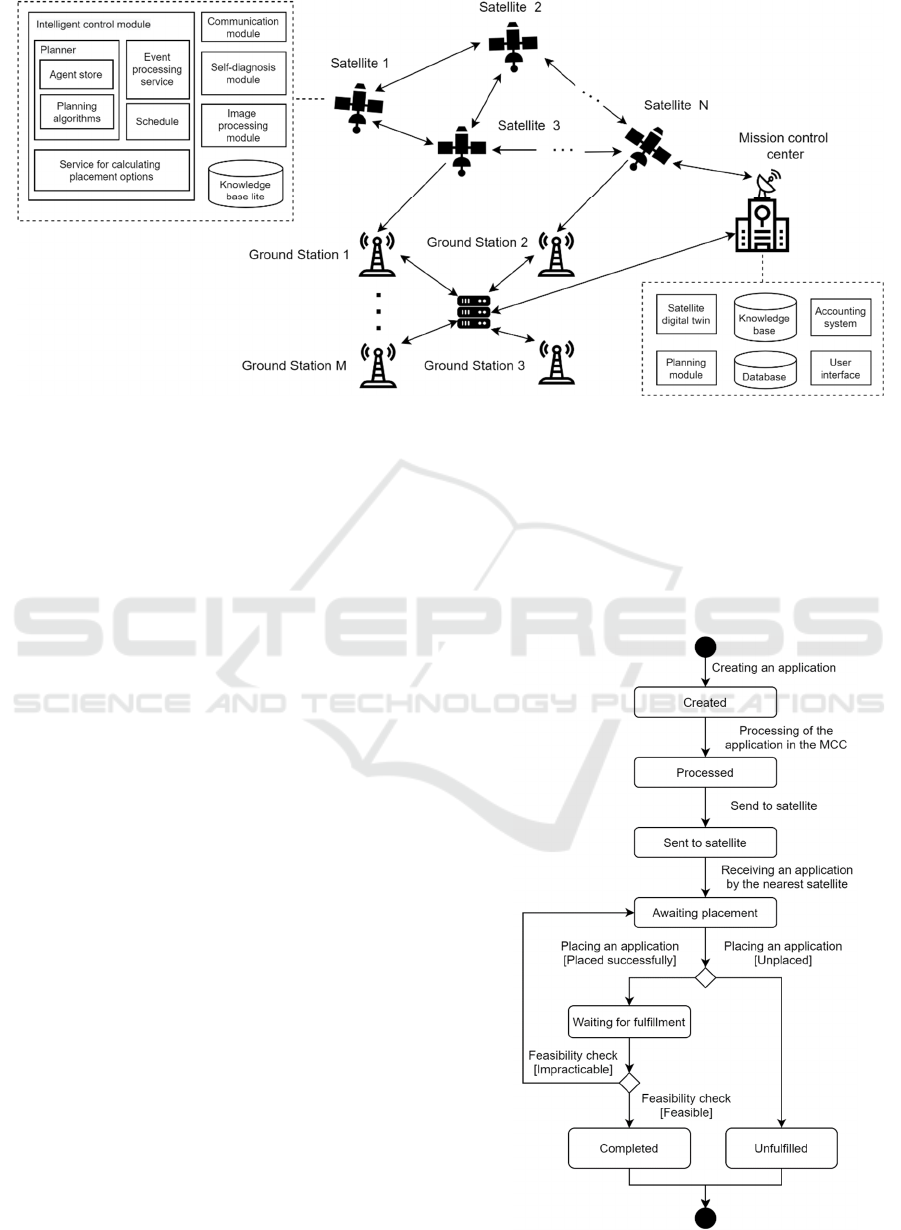
Figure 1: System architecture.
5 DEVELOPMENT OF A
MULTI-AGENT PLANNING
METHOD
5.1 Generalized Scheme of Processing
Applications in the System
Figure 2 shows the application state diagram. After
receiving a survey application, the satellite attempts
to place it using a ground-based planning system to
assess its feasibility at the given horizon.
Moreover, for each satellite, the current state and
action plan are known. The possibility of including
new applications in the current plans of satellites is
assessed taking into account ballistics of each vehicle,
battery reserves, time spent on orientation to the
desired point, etc. At this stage, those applications
that cannot be fulfilled by means of the orbital
constellation are discarded. After processing the
application in the multi-agent planning system on
Earth and accumulating a certain set of received
applications, a summary flight assignment is formed,
which is sent to the nearest available satellite.
The flight assignment is the following set 𝐹𝐴 =
𝐴,𝑂,𝑉
, where A is a short description of the
application (OO coordinates, deadline, restrictions),
O is a list of pre-planned operations (may be empty
for fully autonomous planning), and V are periods of
GS and MCC availability.
The multi-agent system deployed on the basis of
the AIS of the orbital constellation is represented by
two types of agents: the agent of the swarm of
satellites as a whole and the agent of a satellite. The
swarm agent is launched on board the satellite that
received the flight assignment from MCC, its main
goal is to fulfill it as fully as possible with available
resources. The objective function of this agent
coincides with the system’s OF as a whole (1). The
satellite agent is launched on board each vehicle and
is the executor of the received applications.
Figure 2: Application state diagram.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
412

The system can perform several flight missions at
once, and for each of them, its own instance of the
swarm agent will be launched. However, the
instances of satellite agents remain the same for
different flight missions, this is necessary to
coordinate their execution plans.
The logic of agents' work differs depending on the
type of planning at different stages of experimental
research. After receiving the flight assignment, within
hybrid planning the swarm agent simply sends parts
of it to the pre-assigned agents of the satellites-
contractors. Otherwise, in case of autonomous
planning, it initiates a more complex chain of
negotiations with the aim of organizing a team of
executors for each application. The logic of
interaction between agents will be discussed in more
detail later in this chapter.
After the application has reached the contractor, it
waits for the moment of its fulfillment. Shortly before
that, the possibility of executing this application by
the appointed contractors is re-checked, and if for
some reason it turns out to be impossible, an attempt
is made to redistribute it to the available satellite.
Upon completion of the application, the results
obtained are sent to Earth.
In addition, the results of each redistribution are
also sent to Earth for synchronization with the
satellite digital twin and updating the status of the
flight mission.
5.2 Messages Sent during Negotiations
The negotiation protocol of agents is based on the
Contract Net Protocol, chosen among other
distributed protocols for agent negotiations, such as,
for example, (Patrikar, 2015) and (Yu, 2017) due to
its relative simplicity of implementation and
reliability.
The swarm agent acts as the leader (manager), and
satellite agents act as contractors. Table 1 lists the
main messages sent by the swarm agent, with a brief
description and expected response. Table 2 provides
a similar list of messages for satellite agents.
Table 1: Messages sent by the swarm agent.
Message Description Expected
Response
Call Request to execute
the application
Proposal |
Reject
Accept Accept the
contractor’s proposal
–
Reject Refuse the
contractor’s proposal
–
Table 2: Messages sent by the satellite agent.
Message Description Expected
Response
Proposal Proposal to complete the
application
Accept |
Reject
Reject Refusal to execute the
a
pp
lication
–
Cancel Refusal to execute the
assigned application
–
Completed Informing about the fact
of application execution
–
5.3 Hybrid Planning Method
As mentioned above, the hybrid planning method will
be applied at the first stage of experimental research
on deployment of the Satellite Swarm. Hybrid
planning consists of two stages: ground planning and
subsequent adaptive adjustment of the constructed
plan in orbit. The essence of the hybrid planning
method lies in the fact that due to the limited
computing power of the satellites, the initial plan for
target application of the orbital constellation is built
in the traditional way – on Earth, by means of a multi-
agent planning system launched at the MCC. After
that, the resulting solution is sent into orbit and
forwarded there among the performers. At the same
time, in case of impossibility of execution, its
adaptive reconstruction is performed by the multi-
agent planning system deployed in orbit. The main
logic of the swarm and satellite agents is concentrated
in the event handlers presented in Algorithm 1 and
Algorithm 2, respectively.
Algorithm 1: Swarm Agent Event Handler.
In
p
ut: event
1:
swich(event)
2:
case: Flight assignment received;
3:
Send out messages with Assignments to
a
g
ents of the a
pp
ro
p
riate satellites;
4:
case: Cancel message received
5:
Send a Call message to other satellite
a
g
ents;
6:
case: Proposal message received
7:
Proposal receipt;
8:
if (all reply messages are received)
9:
Choose the best proposal;
10:
Reply with an Accept message to the
selected contracto
r
;
11:
Reply with a Reject message to other
contractors;
12:
case: Reject message received
13:
Refusal receipt;
14:
case: Completed message received;
15:
Application completion;
Design of an Autonomous Distributed Multi-agent Mission Control System for a Swarm of Satellites
413

Algorithm 2: Satellite Agent Event Handler.
In
p
ut: event
1:
swich(event)
2:
case: Assignment message received
3:
Analysis of the appointment’s feasibility;
4:
if (assignment is doable)
5:
Fix the appointment in the schedule;
6:
else Reply with a Reject message;
7:
case: Call message received
8:
Search for the application placement
option;
9:
if (Accommodation found)
10:
Reply with a Proposal message;
11:
else Reply with a Reject message;
12:
case: Accept message received
13:
Fix the appointment in the schedule;
14:
case: Receiving self-diagnostics results |
A
pp
roachin
g
a
pp
lication execution
15:
Analysis of the appointment feasibility;
16:
if (assignment is not feasible)
17:
Send the Cancel message;
18:
case: Application completed
19:
Send the Completed message;
5.4 Autonomous Planning Algorithm
The autonomous planning algorithm assumes
complication of the logic of system agents in order to
increase intellectualization of the Satellite Swarm for
solving a wider range of tasks, for example, joint
observation of a certain object. For these purposes,
satellite agents have a separate satisfaction function
SF
i
(5), and their actions become proactive in
accordance with this function.
𝑆𝐹
=
𝑝𝑟𝑜𝑓𝑖𝑡
− 𝑝𝑟𝑜𝑓𝑖𝑡
𝑝𝑟𝑜𝑓𝑖𝑡
−𝑝𝑟𝑜𝑓𝑖𝑡
→𝑚𝑎𝑥,
(5)
𝑝𝑟𝑜𝑓𝑖𝑡
=
∑
𝑐𝑜𝑠𝑡
𝑂𝐹
(6)
where 𝑝𝑟𝑜𝑓𝑖𝑡
i
is the current profit of the i-th satellite;
𝑝𝑟𝑜𝑓𝑖𝑡
is the minimum profit of the i-th satellite;
𝑝𝑟𝑜𝑓𝑖𝑡
is the optimal profit of the i-th satellite;
S is the number of assigned applications.
Processing of applications by the orbital
constellation during autonomous planning is carried
out according to the following algorithm:
1. After receiving the flight assignment with a
list of applications, the swarm agent
sequentially processes the received
applications.
2. For each application, the swarm agent sends
Call messages to all satellite agents - potential
contractors.
3. Upon receipt of the Call message, satellite
agents calculate options for possible
placement of the application, which are free
time slots for operations.
4. If accommodation options are found, satellite
agent responds with a Proposal message
indicating the calculated placement options.
Otherwise, the satellite agent responds with a
Reject message.
5. The swarm agent analyzes the received
Proposal replies and appoints co-executors for
the application. This takes into account time
intersections in the proposed placement
options for synchronization of distributed
observation. Co-executors are chosen so that
the combination of their proposals maximizes
the application’s OF (2).
6. An Accept message is sent to the selected
performers, indicating the exact time of
operations within the application. A Reject
message is sent to other satellites with a list of
assigned executors.
7. Satellite agents who receive the Reject
message begin negotiations with the assigned
contractors in order to receive the application.
7.1 During negotiations, satellite agents send
a message to the executing agent with a
proposal to transfer them execution of
the application.
7.2 The Contractor, in turn, estimates the
value of the required compensation
comp=∆𝑆𝐹 and sends it in a response
message.
7.3 The satellite agent decides whether it is
possible to provide this compensation
comp, based on its increment in the
satisfaction function ∆𝑆𝐹′ . If ∆𝑆𝐹′ >
comp, it agrees to provide this
compensation and becomes the
contractor.
8. After the end of negotiations between the
rejected satellite agents and the appointed
contractors, their results are reported to the
swarm agent to adjust the plan and
synchronize it with the MCC.
9. When the moment of order execution
approaches, the agents of satellites-executors
perform a repeated analysis of assignment
feasibility. If they cannot complete the
assignment, they send a Cancel message to the
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
414

swarm agent. Upon receipt of this message,
the swarm agent tries to find a new executor in
the same way as in steps 2-8.
5.5 The System Testing Plan
To assess the degree of suitability of the proposed
method for solving the problems of autonomous
control of the satellite constellation in space, before
its deployment in orbit, it is planned to conduct a
number of experimental studies by simulation
modeling on Earth. These studies will include the
following:
1. Testing basic scheduling functions.
2. Testing the quality of the solution – to what
extent is the resulting solution close to the
possible global optimum.
3. Testing adaptability of event planning -
analysis of the system's ability to adjust the
schedule according to events in real time.
4. Testing the stability of solutions and
sensitivity to events.
5. Testing the impact of the order of arrival of
applications. Here, the less the final result
depends on the order sequence of events, the
more stable the system finds the optimum and
the higher the planning quality.
6. Performance testing - analysis of system
performance on a large flow of applications.
Based on the results of these studies, a decision
will be made on the possibility of introducing these
methods into the on-board system of real satellites or
the need for their refinement. Results of experimental
studies of the multi-agent system used in the ground
contour are presented in (Skobelev, 2021).
6 CONCLUSIONS
The paper proposes an approach to design of an
autonomous distributed multi-agent mission control
system for a satellite swarm. The existing approach to
planning the work of such a group is considered, the
system architecture and functions of the components
are proposed, and a method for planning the group
work is developed.
The proposed approach makes it possible to
organize both hybrid and completely autonomous
planning in the satellite mesh network. Technical
tasks of building a stable communication system
between satellites are not the topic of this paper, but
effectiveness of the proposed approach in practice
depends on their successful solution.
Further studies will be aimed at practical
implementation of the proposed approach within the
ground control loop and orbital constellation, as well
as at carrying out experimental studies directly on
board the satellites. The expected systemic effect of
creating the Satellite Swarm should consist in greater
openness, efficiency, flexibility in executing
applications, reducing the cost of solving target tasks,
increasing productivity, scalability, reliability and
survivability of satellite swarms of the future, as well
as improving the quality and efficiency of solving the
target tasks by them.
ACKNOWLEDGEMENTS
The paper has been prepared based on materials of
scientific research within the subsidized state theme
of the Samara Federal Research Scientific Center
RAS, Institute for Control of Complex Systems RAS
for research and development on the topic: №
AAAA-A19-119030190053-2.
REFERENCES
Zhang, J., Wang, G., Song, Y., 2019. Task Assignment of
the Improved Contract Net Protocol under a Multi-
Agent System. Algorithms. 12, 70
Shimoda, H., 2016. Remote Sensing Data Applications. In
Handbook of Satellite Applications, P. 1-70.
Lenzen, C., 2014. Onboard Planning and Scheduling
Autonomy within the Scope of the Fire Bird Mission.
Proceedings of the 14-th International Conference on
Space Operations. P. 517-527.
Hanson, J., Sanchez, H., Oyadomari, K., 2014. The EDSN
Intersatellite Communications Architecture.
Proceedings of the AIAA/USU Conference on Small
Satellites. SSC14–WS1.
Skobelev, P., Simonova, E., Galuzin, V., Galitskaya, A.,
Travin, V., 2021. Adaptive planning method for
operations of a multi-satellite swarm for Earth remote
sensing in real time. Proceedings of the 13th
International Conference on Agents and Artificial
Intelligence (ICAART 2021), Vol. 1. P. 48-57.
Wang, J., Demeulemeester, E., Qiu, D., 2016. A pure
proactive scheduling algorithm for multiple earth
observation satellites under uncertainties of clouds.
Computers & Operations Research. Vol. 74. P. 1-13.
He, L., Liu, X., Xing, L., Liu, K., 2019. Hierarchical
scheduling for real-time agile satellite task scheduling
in a dynamic environment. Advances in Space
Research. Vol. 63, Iss. 2, P. 897-912.
He, L., Liu, X., Laporte, G., Chen, Y., 2018. An improved
adaptive large neighborhood search algorithm for
Design of an Autonomous Distributed Multi-agent Mission Control System for a Swarm of Satellites
415

multiple agile satellites scheduling. Computers &
Operations Research. Vol. 100, P. 12-25.
Hosseinabadi, S., Ranjbar, M., Ramyar, S., Amel-Monirian
M., 2017. Scheduling a constellation of agile Earth
observation satellites with pre-emption. Journal of
Quality Engineering and Production Optimization.
Vol. 2, No. 1, P. 47-64.
Bonnet, J., Gleizes, M., Kaddoum, E., Rainjonneau, S.,
Flandin, G., 2015. Multi-satellite Mission Planning
Using a Self-Adaptive Multi-agent System. In
Proceedings of the 2015 IEEE 9th International
Conference on Self-Adaptive and Self-Organizing
Systems (SASO ’15). P. 11-20.
Phillips, S., Parra, F., 2021. A Case Study on Auction-
Based Task Allocation Algorithms in Multi-Satellite
Systems. AIAA 2021-0185. AIAA Scitech 2021 Forum
Song, Y., Huang, D., Zhou, Z., Chen, Y., 2018. An
emergency task autonomous planningmethod of agile
imaging satellite. EURASIP J.Image Video Process.
No. 29, P. 1-11.
Tonetti, S., Cornara, S., Heritier, A., Pirondini, F., 2015.
Fully automated mission planning and capacity analysis
tool for the DEIMOS-2 agilesatellite. In Proc. Work.
Simul. Eur. Space Program. No. 1760, P. 1-15.
Chu, X., Chen, Y., Tan, Y., 2017. An anytime branch and
bound algorithm for agile Earth observation satellite
onboard scheduling. Advances in Space Research. Vol.
60, No. 9, P. 2077-2090.
Picard, G., Caron, C., Farges, J., Guerra, J., Pralet, C., et al.,
2021. Autonomous Agents and Multiagent Systems
Challenges in Earth Observation Satellite
Constellations. International Conference on
Autonomous Agents and Multiagent Systems (AAMAS
2021), Londres, United Kingdom.
Patrikar, M., Vij, S., Mukhopadhyay, D., 2015. An
Approach on Multilateral Automated Negotiation.
Procedia Computer Science. No. 49, P. 298–305.
Yu, C., Wong, T., Li, Z., 2017. A hybrid multi-agent
negotiation protocol supporting supplier selection for
multiple products with synergy effect. International
Jrn. of Production Research. Vol. 55, No. 1, P. 18–37.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
416
