
Advanced Assisted Car Driving in Low-light Scenarios
Francesco Rundo
1 a
, Roberto Leotta
2
, Angelo Messina
3,4 b
and Sebastiano Battiato
2 c
1
STMicroelectronics, ADG Central R&D, Catania, Italy
2
Department of Mathematics and Computer Science, University of Catania, Catania, Italy
3
STMicroelectronics, Catania, Italy
4
National Research Council, Institute for Microelectronics and Microsystems (IMM), Catania, Italy
Keywords:
ADAS, Automotive, Deep Learning.
Abstract:
The robust identification, tracking and monitoring of driving-scenario moving objects represents an extremely
critical task in the safe driving target of the latest generation cars. This accomplishment becomes even more
difficult in a poor light driving scenarios such as driving at night or in rough weather conditions. Since the
driving detected objects could represent a significant collision risk, the aim of the proposed pipeline is to
address the issue of real time low-light driving salient objects detection and tracking. By using a combined
time-transient non-linear deep architecture with convolutional network embedding self attention mechanism,
the authors will be able to perform a real-time assessment of the low-light driving scenario frames. The down-
stream deep backbone learns such features from the driving frames thus improved in terms of light exposure
in order to identify and segment salient objects. The implemented algorithm is ongoing to be ported over an
hybrid architectures consisting of a an embedded system with SPC5x Chorus device with an automotive-grade
system based on STA1295 MCU core. The collected experimental results confirmed the effectiveness of the
proposed approach.
1 INTRODUCTION
Autonomous Driving (AD) or Assisted Driving
(ADAS i.e. Advanced Driver Assisting Systems) sce-
narios are considered very complex environments as
often contain multiple inhomogeneous objects that
move at different speeds and directions (Heimberger
et al., 2017; Horgan et al., 2015). Both for self-driving
vehicles as well as for Assisted driving, it is critical
to have a well lit sampled driving scene frames as
most of the classical computer vision algorithms de-
grade significantly in the absence of adequate lighting
(Pham et al., 2020). More specifically, inadequate or
insufficient light exposure in the driving scene does
not allow the intelligent semantic segmentation algo-
rithms to identify and track objects or a deep classifier
to discriminate one object class rather than another.
This poor efficiency of automotive-based computer
vision algorithms is mainly due to poor significant
pixel-based information i.e. limited discriminating vi-
a
https://orcid.org/0000-0003-1766-3065
b
https://orcid.org/0000-0002-2762-6615
c
https://orcid.org/0000-0001-6127-2470
sual features (Pham et al., 2020) due to video frames
containing poorly lit driving scenes. Autonomous
driving (AD) and driver assistance (ADAS) systems
require high levels of robustness both in performance
and fault-tolerance, often requiring high levels of val-
idation and testing before being placed on the mar-
ket (Rundo et al., 2021a). The authors have al-
ready deeply investigated the specifications and issues
of ADAS technologies (Rundo et al., 2021a; Rundo
et al., 2018b; Trenta et al., 2019; Rundo et al., 2019a;
Rundo et al., 2020b; Rundo et al., 2020c; Rundo et al.,
2019b; Conoci et al., 2018; Rundo, 2021). Consider-
ing what introduced, the authors of this contribution
explore a further critical issues in the automotive field
(both AD and ADAS) related to driving scenarios in
the lack of adequate lighting. This scientific contribu-
tion is organized as follow: the next section “Related
works” include the analysis of the state-of-the-art in
the field of intelligent solutions for low-light driv-
ing scenario enhancement while section 3 “The Pro-
posed Pipeline” describes in detail the proposed solu-
tion. Finally, the section 4 will report the experimen-
tal outcome of the designed pipeline while section 5
“Discussion and Conclusion” includes such descrip-
Rundo, F., Leotta, R., Messina, A. and Battiato, S.
Advanced Assisted Car Driving in Low-light Scenarios.
DOI: 10.5220/0010973300003209
In Proceedings of the 2nd International Conference on Image Processing and Vision Engineering (IMPROVE 2022), pages 109-117
ISBN: 978-989-758-563-0; ISSN: 2795-4943
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
109

tion of the main advantages of the proposed pipeline
with some ideas for the future development.
2 RELATED WORKS
To improve the light-exposure of sampled car driv-
ing video frames, such classic image processing ap-
proaches showed limited effective performance. With
the advent of the recent techniques of deep learning,
several intelligent solutions have been implemented
to perform complex and adaptive image processing
tasks. With specific focus to the artificial light en-
hancement approaches applied to video and image
processing, an interesting method was proposed by
Qu et al in (Qu et al., 2019). They proposed a deep
generative architecture i.e. the Cycle Generative Ad-
versarial Networks (CycleGAN) combined with an
additional discriminators. The authors tested their
solution for addressing the task of the autonomous
robot navigation retrieving very promising results. In
(Chen et al., 2020) the authors analyzed an interest-
ing framework based on bio-inspired solutions. The
authors designed a bio-inspired solution which lever-
age the working-flow of the human retina. They
proposed an event-based neuromorphic vision system
suitable to convert asynchronous driving events into
synchronous image or grid-like representations for
subsequent tasks such as object detection and track-
ing. An innovative light sensitive cells which con-
tain millions of hardware photo-receptors combined
with an intelligent deep algorithm has been proposed
in (Chen et al., 2020) to overcome the low-light driv-
ing issues. The authors in (Rashed et al., 2019) pro-
posed a deep network named FuseMODNet to cover
the issue of low-light driving scenario in ADAS appli-
cations. They proposed a robust and real-time Deep
Convolutional Backbone for Moving Object Detec-
tion (MOD) under low-light conditions by capturing
motion information from both camera and LiDAR de-
vice. They obtained in testing session a promising
10.1% relative improvement on common Dark-KITTI
dataset, and a 4.25% improvement on standard KITTI
dataset (Rashed et al., 2019).
In (Deng et al., 2020) the authors implemented a
Retinex decomposition based solution for low-light
image enhancement with joint decomposition and de-
noising. Preliminary the authors analyzed a new
joint decomposition and denoising enhancement U-
Net network (JDEU). The JDEU network was trained
with low-light images only, and high quality normal-
light images were used as reference to decompose the
desired reflectance component for noise removal. The
so computed reflectance and the adjusted illumina-
tion are reconstructed to produce the enhanced im-
age. Experimental results based on LOL dataset con-
firmed the effectiveness of the pipeline proposed in
(Deng et al., 2020). In (Pham et al., 2020) Pham
et al investigated the usage of Retinex theory as ef-
fective tool for enhancing the illumination and detail
of images. They collected a Low-Light Drive (LOL-
Drive) dataset and applied a deep retinex neural net-
work, named Drive-Retinex, which was validated us-
ing this dataset. The deep Retinex-Net consists of two
sub-networks: Decom-Net (decomposes a color im-
age into a reflectance map and an illumination map)
and Enhance-Net (enhances the light level in the illu-
mination map). The performed several experimental
sessions which confirmed that the proposed method
was able to achieve visually appealing low-light en-
hancement.
Szankin et al analyzed in (Szankin et al., 2018) the
application of low-power system for road condition
classification and pedestrian detection in challeng-
ing environments, including low-light driving. The
authors investigated the influence of various factors
(lightning conditions, moisture of the road surface
and ambient temperature) on the system capability to
properly detect the pedestrian and road in the driv-
ing scenario. The implemented system was tested on
images acquired in different climate zones. The solu-
tion they reported in (Szankin et al., 2018) confirmed
a precision and recall indexes above 95% in challeng-
ing driving scenarios. More details in (Szankin et al.,
2018). In (Yang et al., 2021) another interesting ap-
proach based on Retinex theory was presented.
The aforementioned scientific approaches have al-
lowed some improvement in driving video frames en-
hancement associated with a poorly lit driving sce-
narios. Anyway, the analyzed solutions often fail to
find an optimal trade-off between accuracy and time-
performance due to the complexity of the designed
underlying hardware framework needed to host their
proposed algorithms (Rashed et al., 2019; Deng et al.,
2020; Pham et al., 2020; Szankin et al., 2018; Yang
et al., 2021). The method herein proposed tries to
balance the above items, providing robust assessment
with acceptable time-performance outcomes. The
next section will introduce and detail the proposed
pipeline.
3 THE PROPOSED PIPELINE
The target of this scientific contribution is the design
of a robust and effective pipeline that allows a robust
and intelligent object detection in a poorly lit driving
scenarios. The proposed approach is schematized in
IMPROVE 2022 - 2nd International Conference on Image Processing and Vision Engineering
110
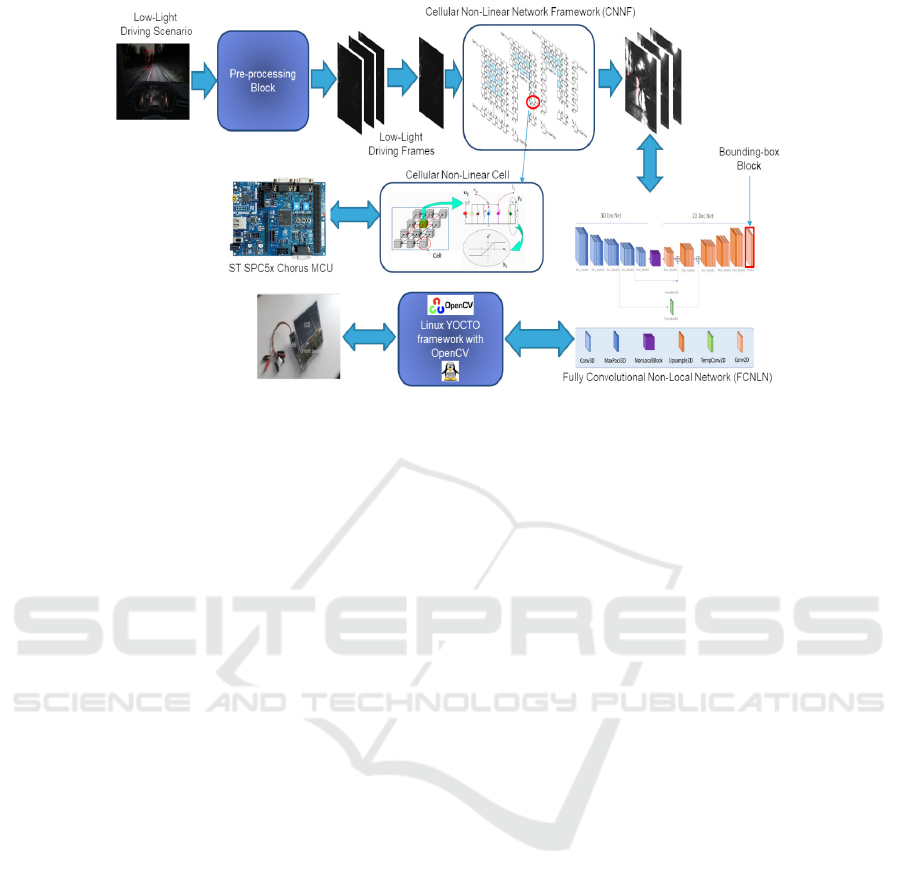
Figure 1: The schematic overview of the proposed pipeline.
Fig. 1. As showed in that figure, the implemented so-
lution is composed by three sub-systems: the first sub-
system is the “Pre-processing block”, the second one
is the “Deep Cellular Non-Linear Network Frame-
work” and finally there is the “Fully Convolutional
Non-Local Network”. More details in the next sec-
tions.
3.1 The Pre-processing Block
As reported in Fig. 1, the first sub-system of the pro-
posed approach is the Pre-processing block. The aim
of this block is the normalization of the sampled driv-
ing video. Specifically, the sampled low-light driving
frames (captured with a low frame-rate video-device
having frame-per-second (fps) in the range 40 − 60)
will be resized (with a classic bi-cubic algorithm)
to a size of 256 × 256. For this purpose, a simple
gray-level automotive-grade video-camera would be
enough even though a similar colour camera, could
be used with a downstream classic YCbCr conversion
from which the gray-level luminance ”Y” will be ex-
tracted. The single sampled driving frame I
k
(x, y) thus
pre-processed will be buffered in the memory area of
the micro ST SPC5x MCU and gradually processed
by the next Deep Cellular Non-Linear Network sub-
system.
3.2 The Deep Cellular Non-linear
Network Framework
As showed in Fig. 1, the pre-processed low-light
frames I
k
(x, y) will be further processed by the the
Deep Cellular Non-Linear Network Framework. The
goal of this block is the artificial increase of the light-
exposure of the sampled video frames representative
of the driving scenario in order to get a robust ob-
ject detection or segmentation. A brief introduction
about the Time-transient Deep Non-linear Network as
knows as Cellular Neural (or Non-Linear) Network
(TCNN). The first architecture of the Cellular Neu-
ral (or Nonlinear) Network (CNN) was firstly pro-
posed by L.O Chua and L. Yang (Chua and Yang,
1988a; Chua and Yang, 1988b). The CNNs archi-
tecture could be defined as high speed local intercon-
nected computing array of analog processors known
as “cells” (Chua and Yang, 1988b).
Many applications and extensions have been pro-
posed in scientific literature (Conoci et al., 2017;
Mizutani, 1994). The core of the CNN backbone is
the cell. The CNNs processing is configured through
the instructions provided by the so-called cloning
templates (Chua and Yang, 1988a; Chua and Yang,
1988b). Each cell of the CNN array may be con-
sidered as dynamical system which is arranged into
a topological 2D or 3D structure. The CNN cells in-
teract each other within its neighborhood defined by
heuristically ad-hoc defined radius. Each CNN cell
has an input, a state and an output as Piece-Wise-
Linear(PWL) state re-mapping. The CNNs can be
implemented with analog discrete components or by
means of U-VLSI technology performing near real-
time analogic processing task. Some stability results
and consideration about the dynamics of the CNNs
can be found in (Cardarilli et al., 1993).
In the CNN paradigm different heuristic relation-
ship cell-models between state, input and neighbor-
hood can be defined. Consequently, the CNN archi-
tecture can be considered as a system of cells (or dy-
namical neurons) mapped over a normed space S
N
Advanced Assisted Car Driving in Low-light Scenarios
111

(cell grid), which is a discrete subset of IR
n
(generally
n ≤ 3) with distance function d : S
N
−→ N. The CNNs
cells are identified by indices defined in a space-set
P
i
. Neighborhood function N
r
(·) can be defined with
the following Eq. 1 and Eq. 2:
N
r
: P
i
−→ P
θ
i
(1)
N
r
(k) = {P|d(i, j) ≤ r
c
} (2)
where θ depends on r
c
(neighborhood radius) and on
spatial-geometry representation of the grid.
Cells are multiple input – single output nonlin-
ear processors. The CNNs can be implemented as
single layer or multi-layers so that the cell grid can
be e.g. a planar array (with rectangular, square,
octagonal geometry) or a k-dimensional array (usu-
ally k ≥ 3), generally considered and realized as
a stack of k-dimensional arrays (layers). For the
pipeline herein described, a further extension of the
Chua’s CNN is proposed i.e. the time Transiert CNN
(TCNN). Specifically, a new cloning template matrix
A
4
(i, j; k, l) as detailed in Eq. 3 is added in the classi-
cal CNN dynamical paradigm.
C
dx
i j
(t, t
k
)
dt
=
−1
R
x
x
i j
+
∑
C(k,l)∈N
r
(i, j)
A
1
(i, j; k, l)y
kl
(t, t
k
)
+
∑
C(k,l)∈N
r
(i, j)
A
2
(i, j; k, l)u
kl
(t, t
k
)
+
∑
C(k,l)∈N
r
(i, j)
A
3
(i, j; k, l)x
kl
(t, t
k
)
+
∑
C(k,l)∈N
r
(i, j)
A
4
(i, j; k, l)(y
i j
(t), y
kl
(t), t
k
)
+ I
(1 ≤ i ≤ M, 1 ≤ j ≤ N)
(3)
where,
y
i j
(t) =
1
2
(|x
i j
(t, t
k
) + 1| − |x
i j
(t, t
k
) − 1|)
N
r
(i, j) = {C
r
(k, l);(max(|k − i|, |i − j|) ≤ r
c
,
1 ≤ k ≤ M,
1 ≤ l ≤ N)}
In Eq. 3 the N
r
(i, j) represents the neighborhood
of each cell C(i, j) with radius r
c
. The terms x
i j
, y
i j
,
u
i j
and I are respectively: the state, the output and the
input of the cell C(i, j) while A
1
(i, j; k, l), A
2
(i, j; k, l),
A
3
(i, j; k, l) and A
4
(i, j; k, l) are the cloning templates
suitable to define the TCNNs processing task. As de-
scribed by the researchers (Chua and Yang, 1988b;
Conoci et al., 2017; Mizutani, 1994; Cardarilli et al.,
1993; Roska and Chua, 1992; Arena et al., 1996)
through the numerical configuration of the cloning
templates as well as the bias I, it is possible to con-
figure the type of processing provided by the CNNs.
In this contribution, the authors propose a
Time-transient Deep CNN (TCNN) i.e. a non-linear
network which dynamically evolves in a short time
range, i.e. during the transient [t, t
k
]. Normally, CNN
evolves up to a defined steady-state (Chua and Yang,
1988b; Conoci et al., 2017; Mizutani, 1994; Cardarilli
et al., 1993). The dynamic mathematical model of the
TCNN is reported in 3. Specifically, the input visual
256 × 256 low-light driving frame I
k
(x, y), will be fed
as state x
i j
and input u
i j
of the TCNN D
k
(x, y). Each
setup of the cloning templates and bias A
1
(i, j; k, l),
A
2
(i, j; k, l), A
3
(i, j; k, l), A
4
(i, j; k, l), I will allow
to retrieve a specific augmentation-enhancement
of the input frame in order to provide an artificial
enhancement of the low-light frame. As reported
in (Chua and Yang, 1988a; Chua and Yang, 1988b;
Conoci et al., 2017; Mizutani, 1994; Cardarilli et al.,
1993; Roska and Chua, 1992; Arena et al., 1996),
defined a specific CNNs target to be reached, there
is no analytic-deterministic algorithm to retrieve
the coefficients of the correlated cloning templates.
There are several database (Mizutani, 1994; Cardar-
illi et al., 1993; Roska and Chua, 1992; Arena et al.,
1996) but each processing task need ad-hoc cloning
templates numerical configuration. Therefore, by
means of heuristically driven optimization tests, we
tried to setup a cloning templates configurations
that were able to artificially improve the lighting
conditions of the input sampled driving frames.
The following cloning templates configuration were
used as final setup of the proposed TCNN: A
1
=
[0.03, 0.03, 0.03; 0.02, 0.02, 0.025;0.25, 0.25; 0.25];
A
2
= [0.01, 0.01, 0.01;0.01, 0.01, 0.01; 0.04, 0.04;
0.04]; A
3
= 0; A
4
= 0; I = −0.55. The out-
put of the previous TCNN will be further pro-
cessed by another TCNN configured as follow:
A
1
= [0.75, 0, 0;0.75, 2.5, 0.75; 0.75, 0, −0.75];
A
2
= [0.01, 0.01, 0.01;0.01, 0.01, 0.01; 0.04, 0.04;
0.04]; A
3
= 0; A
4
= 0; I = −0.75 and
A
1
= [0.75, 0.75, 0.75; 0.75, 2.5, 0.75;0.75, 0 − 0.75];
A
2
= [0.01, 0.01, 0.01;0.01, 0.01, 0.01; 0.04, 0.04,
0.04]; A
3
= [0.75, 0.75, 0.75;0.75, 2.5, 0.75; −0.55, 0,
− 0.55]; A
4
= 0; I = −0.75. In the Fig. 2 we report
such instances of the TCNN light enhancement, with
a detail of each improvement occurred at each TCNN
processing as per aforementioned cloning setup.
As shown in Fig. 2, the TCNN-based framework
is able to significantly improve the light exposure of
the source low-light driving video frames.
IMPROVE 2022 - 2nd International Conference on Image Processing and Vision Engineering
112

Figure 2: An instance of the low-light image enhancement
performed by the proposed TCNN.
3.3 The Fully Convolutional Non-local
Network
The target of this block is the salient detection and
segmentation (bounding box) of the light-enhanced
input driving video frames. As highlighted in Fig. 1,
the output of the previous TCNN block will be fed as
input to this Fully Convolutional Non-Local Network
(FCNLN) sub-system.
The sampled driving scene video frames will be
processed by ad-hoc designed 3Dto2D Semantic Seg-
mentation Fully Convolutional Non-Local Network
as reported in Fig. 1. Through a semantic segmen-
tation of the driving context, thanks to the encod-
ing / decoding architecture of designed deep back-
bone, the saliency map of the driving scene will be
reconstructed. This saliency map will be used by the
bounding-box block which reconstruct the segmenta-
tion Region of Interest (ROI). The proposed FCNLN
architecture is structured as follows. The encoder
block (3D Enc Net) processes the space-time features
of the captured driving scene frames and it is made up
of 5 blocks. The first two blocks includes (for each
block) two separable convolution layers with 3 ×3×2
kernel filter followed by a batch normalization, ReLU
layer and a downstream 1 × 2 × 2 max-pooling layer.
The remaining three blocks (for each block) includes
two separable convolution layers with 3 × 3 × 3 ker-
nel filter followed by a batch normalization, another
convolutional layer with 3 × 3 × 3 kernel, batch nor-
malization and ReLU with a downstream 1 × 2 × 2
max-pooling layer.
Before to fed the so processed features to the De-
coder side, a Non-Local self attention block is em-
bedded in the proposed backbone. Non-local blocks
have been recently introduced (Wang et al., 2018),
as very promising approach for capturing space-time
long-range dependencies and correlation on feature
maps, resulting in a sort of “self-attention” mecha-
nism (Rundo et al., 2020a). Non-local blocks take
inspiration from the non-local means method, exten-
sively applied in computer vision (Wang et al., 2018;
Rundo et al., 2020a). Self-attention through non-local
blocks aims to enforce the model to extract correlation
among feature maps by weighting the averaged sum
of the features at all spatial positions in the processed
feature maps (Wang et al., 2018).
In our pipeline, non-local blocks operate between
the 3D encoder and 2D decoder side respectively. The
mathematical formulation of non-local operation is
reported. Given a generic deep network as well as
a general input data x, the employed non-local oper-
ation computes the corresponding response y
i
(of the
given Deep architecture) at a i location in the input
data as a weighted sum of the input data at all posi-
tions j 6= i:
y
i
=
1
ψ(x)
∑
∀ j
ξ(x
i
, x
j
)β(x
j
) (4)
With ξ(·) being a pairwise potential describing the
affinity or relationship between data positions at index
i and j respectively. The function β(·) is, instead, a
unary potential modulating ξ according to input data.
The sum is then normalized by a factor ψ(x). The
parameters of ξ, β and ψ potentials are learned during
model’s training and defined as in the following Eq. 5:
ξ(x
i
, x
j
) = e
Γ(x
i
)
T
Φ(x
j
)
(5)
Where Γ and Φ are two linear transformations of
the input data x with learnable weights W
Γ
and W
Φ
:
Γ(x
i
) = W
Γ
x
i
Φ(x
j
) = W
Φ
x
j
β(x
j
) = W
β
x
j
(6)
For the β(·) function, a common linear embed-
ding (classical 1 × 1 × 1 convolution) with learnable
weights W
β
is employed. The normalization function
Ψ(x) is detailed in the following Eq. 7.
Ψ(x) =
∑
∀ j
ξ(x
i
, x
j
) (7)
The above mathematical formulation of Non-
Local features processing is named “Embedded Gaus-
sian” (Conoci et al., 2017). The output of Non-Local
processing of the encoded features will be fed in the
decoder side of the pipeline. The Decoder backbone
(2D Dec Net) is composed according to the encoder
backbone for up-sampling and decoding the visual
Non-Local features of the encoder. The output of the
so designed FCNLN is the feature saliency map of the
acquired scene frame i.e. the segmented area of the
most salient object. The Fig. 3 shows some instance
of the processing output of the proposed FCNLN.
The Bounding-box block will define the bounding
area around the saliency map by means of a enhanced
minimum rectangular box criteria (increased by 20%
along each dimension) which is able to enclose the
salience area. The Fig. 4 shows an example of an au-
tomatically generated bounding-box (red rectangle).
Advanced Assisted Car Driving in Low-light Scenarios
113
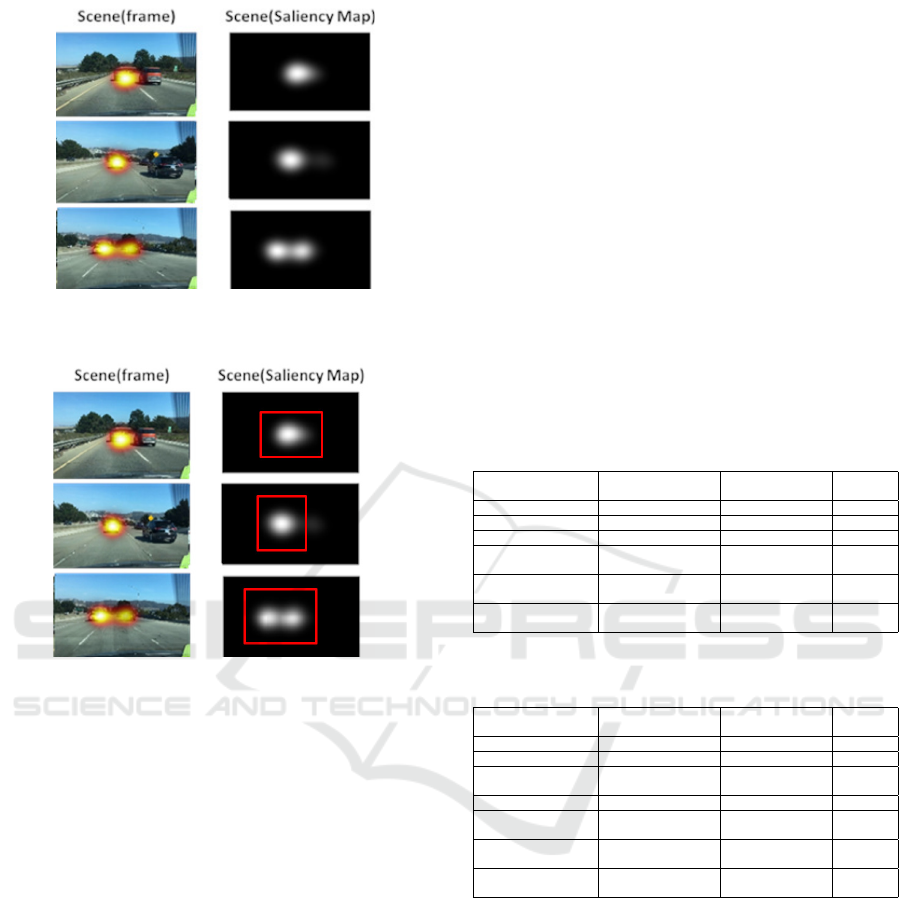
Figure 3: Saliency analysis of the video representing the
driving scene.
Figure 4: Bounding-box segmentation (red rectangular box)
of the saliency map.
The proposed FCNLN architecture has been val-
idated and tested on the DHF1K dataset (Min and
Corso, 2019) retrieving the following performance:
Area Under the Curve: 0.899; Similarity: 0.455;
Correlation Coefficient: 0.491; Normalized Scanpath
Saliency: 2.772. Unfortunately, more efficient deep
architectures have the disadvantage of being complex
and difficult to be hosted into automotive-grade em-
bedded systems (STMicroelectronics, 2018; Rundo
et al., 2021b; Rundo et al., 2020b).
4 EXPERIMENTAL RESULTS
To test the proposed pipeline, we arranged sepa-
rate validation for each of the implemented sub-
system. Specifically, for the visual saliency assess-
ment, the author has extracted images from the fol-
lowing dataset: Oxford Robot Car dataset (Maddern
et al., 2017) and the Exclusively Dark (ExDark) Im-
age Dataset (Loh and Chan, 2019). This so composed
dataset contains more than 20 million images having
an average resolution greater than 640 × 480. We se-
lect 15000 driving frames of that dataset to compose
the training set. Moreover, a further testing and val-
idation sessions have been made over such custom
dataset. The authors have splitted the dataset as fol-
low: 70% for training as well as 30% for testing and
validation of the proposed approach.
The FCNLN has been trained with a mini-batch
gradient descent with Adam optimizer and initial
learning rate of 0.01. The deep model is implemented
using Pytorch framework. Experiments were carried
out on a server with Intel Xeon CPUs equipped with
a Nvidia GTX 2080 GPU with 16 Gbyte ad mem-
ory video. The collected experimental results have
been reported in the following Table 1 and Table 2.
In particular, Table 1 shows the results obtained with-
out low-light enhancement, Table 2 shows the results
obtained with the low-light enhancement.
Table 1: Benchmark comparison with similar pipeline with-
out low-light enhancement.
Pipeline
Number of Detected
Objects
Average Degree of
Confidence
Accuracy
Ground Truth 12115 1.0 100%
Proposed 9995 0.9001 82.501%
Yolo V3 7991 0.8851 65.959%
FCN with DenseNet-
201 as backbone
8337 0.8912 68.815%
Faster-R-CNN
(ResNet as backbone)
8009 0.8543 66.108%
Mask-R-CNN
(ResNet as backbone)
9765 0.8991 80.602%
Table 2: Benchmark comparison with similar pipeline with
low-light enhancement.
Pipeline
Number of Detected
Objects
Average Degree of
Confidence
Accuracy
Ground Truth 12115 1.0 100%
Proposed 10222 0.9055 84.374%
Proposed without
Non-Local Block
10002 0.9541 82.558%
Yolo V3 9991 0.8991 82.468%
FCN with DenseNet-
201 as backbone
9123 0.9001 75.303%
Faster-R-CNN
(ResNet as backbone)
9229 0.8998 76.178%
Mask-R-CNN
(ResNet as backbone)
10125 0.9112 83.574%
As showed in Table 1, the proposed pipeline out-
performs the compared deep architecture in terms of
object detection accuracy in low-light driving scenar-
ios. The enhanced performance made by the contri-
bution of the designed TCNN processing is reported
in Table 2.
From Table 2 it is highlighted a significant in-
crease in the performance of the TCNN enhanced
pipeline. The proposed whole pipeline was able to
perform better than the others also in terms of clas-
sification and this would seem to be related to the
action of Non-Local self-attention blocks as the net-
work without these blocks degrades in performance
(see ablation reported in Table 2). The Fig. 5 reports
some instances of the enhanced driving video frames
IMPROVE 2022 - 2nd International Conference on Image Processing and Vision Engineering
114

Figure 5: Some instances of the low-light driving frames
with corresponding enhanced and segmented frames.
with embedded bounding box of the light-enhanced
detected salient objects.
5 DISCUSSION AND
CONCLUSION
The ability of our proposed pipeline to assess the
overall low-light driving has been confirmed by the
performance results described in the previous section.
Compared with other methods in the literature, the
implemented system shows competitive advantages
mainly related to the underlying hosting hardware.
Our approach overcomes the main drawbacks of the
similar solutions as it uses only the TCNN block for
performing ad-hoc pre-processing of the source low-
light driving frames. This effective pipeline is cur-
rently being ported to an embedded system based on
the STA1295 Accordo5 SoC platform produced by
STMicroelectronics with a software framework em-
bedding a distribution of YOCTO Linux O.S (STMi-
croelectronics, 2018) and OpenCV stack. We are
working to enhance the pipeline by means of adaptive
domain adaptation approaches in order to improve the
overall robustness of the proposed intelligent pipeline
(Rundo et al., 2019c; Rundo et al., 2019d; Rundo
et al., 2018a; Banna et al., 2018; Banna et al., 2019).
ACKNOWLEDGEMENTS
This research was funded by the National Funded
Program 2014-2020 under grant agreement n. 1733,
(ADAS + Project). The reported information is cov-
ered by the following registered patents: IT Patent
Nr. 102017000120714, 24 October 2017. IT Patent
Nr. 102019000005868, 16 April 2018; IT Patent Nr.
102019000000133, 07 January 2019.
REFERENCES
Arena, P., Baglio, S., Fortuna, L., and Manganaro, G.
(1996). Dynamics of state controlled cnns. In 1996
IEEE International Symposium on Circuits and Sys-
tems. Circuits and Systems Connecting the World. IS-
CAS 96, volume 3, pages 56–59. IEEE.
Banna, G. L., Camerini, A., Bronte, G., Anile, G., Ad-
deo, A., Rundo, F., Zanghi, G., Lal, R., and Li-
bra, M. (2018). Oral metronomic vinorelbine in
advanced non-small cell lung cancer patients unfit
for chemotherapy. Anticancer research, 38(6):3689–
3697.
Banna, G. L., Olivier, T., Rundo, F., Malapelle, U.,
Fraggetta, F., Libra, M., and Addeo, A. (2019). The
promise of digital biopsy for the prediction of tumor
molecular features and clinical outcomes associated
with immunotherapy. Frontiers in medicine, 6:172.
Cardarilli, G., Lojacono, R., Salerno, M., and Sargeni, F.
(1993). Vlsi implementation of a cellular neural net-
work with programmable control operator. In Pro-
ceedings of 36th Midwest Symposium on Circuits and
Systems, pages 1089–1092. IEEE.
Chen, G., Cao, H., Conradt, J., Tang, H., Rohrbein, F.,
and Knoll, A. (2020). Event-based neuromorphic vi-
sion for autonomous driving: a paradigm shift for bio-
inspired visual sensing and perception. IEEE Signal
Processing Magazine, 37(4):34–49.
Chua, L. O. and Yang, L. (1988a). Cellular neural networks:
Applications. IEEE Transactions on circuits and sys-
tems, 35(10):1273–1290.
Chua, L. O. and Yang, L. (1988b). Cellular neural networks:
Theory. IEEE Transactions on circuits and systems,
35(10):1257–1272.
Conoci, S., Rundo, F., Fallica, G., Lena, D., Buraioli, I., and
Demarchi, D. (2018). Live demonstration of portable
systems based on silicon sensors for the monitoring
of physiological parameters of driver drowsiness and
pulse wave velocity. In 2018 IEEE Biomedical Cir-
cuits and Systems Conference (BioCAS), pages 1–3.
IEEE.
Conoci, S., Rundo, F., Petralta, S., and Battiato, S. (2017).
Advanced skin lesion discrimination pipeline for early
melanoma cancer diagnosis towards poc devices. In
2017 European Conference on Circuit Theory and De-
sign (ECCTD), pages 1–4. IEEE.
Deng, J., Pang, G., Wan, L., and Yu, Z. (2020). Low-light
image enhancement based on joint decomposition and
denoising u-net network. In 2020 IEEE Intl Conf on
Parallel & Distributed Processing with Applications,
Big Data & Cloud Computing, Sustainable Comput-
ing & Communications, Social Computing & Net-
working (ISPA/BDCloud/SocialCom/SustainCom),
pages 883–888. IEEE.
Heimberger, M., Horgan, J., Hughes, C., McDonald, J., and
Yogamani, S. (2017). Computer vision in automated
Advanced Assisted Car Driving in Low-light Scenarios
115

parking systems: Design, implementation and chal-
lenges. Image and Vision Computing, 68:88–101.
Horgan, J., Hughes, C., McDonald, J., and Yogamani, S.
(2015). Vision-based driver assistance systems: Sur-
vey, taxonomy and advances. In 2015 IEEE 18th In-
ternational Conference on Intelligent Transportation
Systems, pages 2032–2039. IEEE.
Loh, Y. P. and Chan, C. S. (2019). Getting to know low-light
images with the exclusively dark dataset. Computer
Vision and Image Understanding, 178:30–42.
Maddern, W., Pascoe, G., Linegar, C., and Newman, P.
(2017). 1 year, 1000 km: The oxford robotcar
dataset. The International Journal of Robotics Re-
search, 36(1):3–15.
Min, K. and Corso, J. J. (2019). Tased-net: Temporally-
aggregating spatial encoder-decoder network for
video saliency detection. In Proceedings of the
IEEE/CVF International Conference on Computer Vi-
sion, pages 2394–2403.
Mizutani, H. (1994). A new learning method for multi-
layered cellular neural networks. In Proceedings of
the Third IEEE International Workshop on Cellular
Neural Networks and their Applications (CNNA-94),
pages 195–200. IEEE.
Pham, L. H., Tran, D. N.-N., and Jeon, J. W. (2020). Low-
light image enhancement for autonomous driving sys-
tems using driveretinex-net. In 2020 IEEE Inter-
national Conference on Consumer Electronics-Asia
(ICCE-Asia), pages 1–5. IEEE.
Qu, Y., Ou, Y., and Xiong, R. (2019). Low illumination
enhancement for object detection in self-driving. In
2019 IEEE International Conference on Robotics and
Biomimetics (ROBIO), pages 1738–1743. IEEE.
Rashed, H., Ramzy, M., Vaquero, V., El Sallab, A., Sistu,
G., and Yogamani, S. (2019). Fusemodnet: Real-time
camera and lidar based moving object detection for ro-
bust low-light autonomous driving. In Proceedings of
the IEEE/CVF International Conference on Computer
Vision Workshops, pages 0–0.
Roska, T. and Chua, L. O. (1992). Cellular neural networks
with non-linear and delay-type template elements and
non-uniform grids. International Journal of Circuit
Theory and Applications, 20(5):469–481.
Rundo, F. (2021). Intelligent real-time deep system for
robust objects tracking in low-light driving scenario.
Computation, 9(11):117.
Rundo, F., Banna, G. L., Prezzavento, L., Trenta, F.,
Conoci, S., and Battiato, S. (2020a). 3d non-
local neural network: A non-invasive biomarker for
immunotherapy treatment outcome prediction. case-
study: Metastatic urothelial carcinoma. Journal of
Imaging, 6(12):133.
Rundo, F., Conoci, S., Banna, G. L., Ortis, A., Stanco, F.,
and Battiato, S. (2018a). Evaluation of levenberg–
marquardt neural networks and stacked autoencoders
clustering for skin lesion analysis, screening and
follow-up. IET Computer Vision, 12(7):957–962.
Rundo, F., Conoci, S., Battiato, S., Trenta, F., and Spamp-
inato, C. (2020b). Innovative saliency based deep
driving scene understanding system for automatic
safety assessment in next-generation cars. In 2020
AEIT International Conference of Electrical and Elec-
tronic Technologies for Automotive (AEIT AUTOMO-
TIVE), pages 1–6. IEEE.
Rundo, F., Conoci, S., Spampinato, C., Leotta, R., Trenta,
F., and Battiato, S. (2021a). Deep neuro-vision em-
bedded architecture for safety assessment in percep-
tive advanced driver assistance systems: the pedes-
trian tracking system use-case. Frontiers in neuroin-
formatics, 15.
Rundo, F., Leotta, R., and Battiato, S. (2021b). Real-time
deep neuro-vision embedded processing system for
saliency-based car driving safety monitoring. In 2021
4th International Conference on Circuits, Systems and
Simulation (ICCSS), pages 218–224. IEEE.
Rundo, F., Petralia, S., Fallica, G., and Conoci, S. (2018b).
A nonlinear pattern recognition pipeline for ppg/ecg
medical assessments. In Convegno Nazionale Sensori,
pages 473–480. Springer.
Rundo, F., Rinella, S., Massimino, S., Coco, M., Fallica, G.,
Parenti, R., Conoci, S., and Perciavalle, V. (2019a).
An innovative deep learning algorithm for drowsiness
detection from eeg signal. Computation, 7(1):13.
Rundo, F., Spampinato, C., Battiato, S., Trenta, F., and
Conoci, S. (2020c). Advanced 1d temporal deep di-
lated convolutional embedded perceptual system for
fast car-driver drowsiness monitoring. In 2020 AEIT
International Conference of Electrical and Electronic
Technologies for Automotive (AEIT AUTOMOTIVE),
pages 1–6. IEEE.
Rundo, F., Spampinato, C., and Conoci, S. (2019b). Ad-hoc
shallow neural network to learn hyper filtered photo-
plethysmographic (ppg) signal for efficient car-driver
drowsiness monitoring. Electronics, 8(8):890.
Rundo, F., Trenta, F., Di Stallo, A. L., and Battiato, S.
(2019c). Advanced markov-based machine learning
framework for making adaptive trading system. Com-
putation, 7(1):4.
Rundo, F., Trenta, F., di Stallo, A. L., and Battiato, S.
(2019d). Grid trading system robot (gtsbot): A novel
mathematical algorithm for trading fx market. Applied
Sciences, 9(9):1796.
STMicroelectronics (2018). STMicroelectronics
ACCORDO 5 Automotive Microcontroller.
https://www.st.com/en/automotive-infotainment-
and-telematics/sta1295.html. (accessed on 01 June
2021).
Szankin, M., Kwa
´
sniewska, A., Ruminski, J., and Nico-
las, R. (2018). Road condition evaluation using fu-
sion of multiple deep models on always-on vision pro-
cessor. In IECON 2018-44th Annual Conference of
the IEEE Industrial Electronics Society, pages 3273–
3279. IEEE.
Trenta, F., Conoci, S., Rundo, F., and Battiato, S. (2019).
Advanced motion-tracking system with multi-layers
deep learning framework for innovative car-driver
drowsiness monitoring. In 2019 14th IEEE Inter-
national Conference on Automatic Face & Gesture
Recognition (FG 2019), pages 1–5. IEEE.
Wang, X., Girshick, R., Gupta, A., and He, K. (2018). Non-
local neural networks. In Proceedings of the IEEE
IMPROVE 2022 - 2nd International Conference on Image Processing and Vision Engineering
116

conference on computer vision and pattern recogni-
tion, pages 7794–7803.
Yang, W., Wang, W., Huang, H., Wang, S., and Liu, J.
(2021). Sparse gradient regularized deep retinex net-
work for robust low-light image enhancement. IEEE
Transactions on Image Processing, 30:2072–2086.
Advanced Assisted Car Driving in Low-light Scenarios
117
