
On Ethical Considerations Concerning Autonomous Vehicles
Konstantina Marra
a
, Ilias Panagiotopoulos
b
and George Dimitrakopoulos
c
Department of Informatics and Telematics, Harokopio University, Athens, Greece
Keywords: Autonomous Vehicles, Ethical Dilemmas, Trolley Problem, Social Aspects, Thought Experiments.
Abstract:
Autonomous vehicles are studied in terms of technology and economics, but there is also a social component
to be discussed. Whereas technical challenges are being resolved and great progress is being made in their
design, social and ethical issues arise, with legal and philosophical aspects, which must be addressed.
Following this trend, the present study focuses on exploring peoples’ views concerning ethical dilemmas
related to the behaviour of autonomous vehicles in road accidents. In addition, liability issues in cases of
such accidents are examined. On this basis, a questionnaire based survey is conducted, aiming at
investigating the views of future owners of autonomous vehicles on liability and on the decisions, which
such vehicles should make in the event of an unavoidable road accident. The above is achieved through a
series of thought experiments, which reveal how potential consumers solve different versions of the Trolley-
problem in two cases: with and without the option of equal treatment. The present analysis treats the risk of
accidents as inevitable and tries to prevent public reactions which could stall the adoption of autonomous
vehicles, by revealing peoples’ perceptions of morality, which in the future could contribute to creating
more ethical and trustworthy autonomous vehicles.
a
https://orcid.org/0000-0001-6858-2914
b
https://orcid.org/0000-0003-4366-6470
c
https://orcid.org/0000-0002-7424-8557
1 INTRODUCTION
Autonomous vehicles will become a reality on the
highways in the near future, and it is expected that
by 2040 the highways will have lanes specially
designed for them (Yang and Coughlin, 2014). This
prospect is generally considered to be positive, since
autonomous vehicles are expected to improve our
quality of life and to be able to prevent road
accidents. Schoettle and Sivak (2015), Gless et al.
(2016), Lohmann (2016) and Luzuriaga et al. (2019)
have pointed out the many advantages of using
autonomous vehicles.
However, one should not think that such vehicles
never make mistakes or that they are completely
safe. Accidents can be prevented, provided that
errors and imperfections of the vehicle software
remain as limited as possible (Luzuriaga et al.,
2019). Otherwise, an autonomous vehicle may not
respond appropriately to an unforeseen critical
situation, which could result in vehicle damage,
human injury or even loss of life (Gless et al., 2016)
Technical failures are not the only risk. Autonomous
vehicles are also vulnerable to hacking. A person
with malicious intent could, for example, gain illegal
access to the vehicle and disrupt the operation of its
sensors, in order to cause an accident (Lohmann,
2016; Holstein et al., 2018). Therefore, the scientists
and engineers involved in the design of these
vehicles must overcome significant technological
challenges, particularly those related to the safe
interaction of vehicles with their environment
(drivers of conventional vehicles, pedestrians,
cyclists and other autonomous vehicles).
Although autonomous vehicles are a topic of
discussion from a technological and economic point
of view, there is also a social side to be considered.
While significant progress is being made in their
design, as technical issues are gradually being
resolved, social and ethical issues arise with legal
and philosophical implications that need to be
addressed (Holstein and Dodig-Crnkovic, 2018).
The experts voice concerns related to the behavior of
autonomous vehicles in cases when accidents are
unavoidable. One example of a moral issue, from
180
Marra, K., Panagiotopoulos, I. and Dimitrakopoulos, G.
On Ethical Considerations Concerning Autonomous Vehicles.
DOI: 10.5220/0010979800003191
In Proceedings of the 8th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2022), pages 180-187
ISBN: 978-989-758-573-9; ISSN: 2184-495X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

which significant ethical dilemmas arise, is whether
the aim of the vehicle should be to protect its
passengers at all costs or to act in a way that
minimizes the total number of losses (Luzuriaga et
al., 2019). Except for that, in the event of an
accident, it is certain that liability issues will
emerge. One can easily imagine that the attribution
of responsibilities becomes more complex, since
autonomous vehicles can operate completely without
a driver (Gless et al., 2016).
In light of the above, the purpose of the present
study is: (a) to investigate peoples’ views concerning
which behaviours of autonomous vehicles in critical
situations and road accidents should be deemed
acceptable, (b) to highlight possible universal
preferences of future buyers of autonomous vehicles,
which could provide a solution to the problem of
choosing ethical rules, based on which autonomous
vehicles could be programmed in the future. This is
achieved through a series of thought experiments, in
which participants are asked to make decisions on
behalf of the autonomous vehicle during the road
accident.
The paper is structured as follows: Section 2
contains an overview of past studies and presents the
ethical problems of driverless vehicles to which the
present study refers. The methods used to conduct
the present research are explained in section 3.
Results as well as conclusions and final remarks are
mentioned in sections 4 and 5 of the paper,
respectively.
2 ETHICS AND DRIVERLESS
VEHICLES
There are a number of ethical issues related to
driverless vehicles, such as issues concerning safety,
software security, privacy, trust, transparency,
reliability, accountability (Holstein et al., 2018).
First of all, in this section, the term “Driverless
Dilemma” is explained. Furthermore, an overview of
recent studies is given, related to how people
perceive crashes involving driverless vehicles, what
their varying responses to the driverless dilemma are
and what approaches have been proposed for the
morality problem.
2.1 Definition of the “Driverless
Dilemma”
There are three main methods of programming
autonomous vehicles (Luzuriaga et al., 2019): (1) By
using pre-existing ethical rules based on philosophy.
This approach is problematic, as there is no
unanimity among moral philosophers as to what is
moral. (2) Using rules that the general public
considers appropriate and acceptable, in order to
avoid social outcry in the event of a road accident.
(3) Using rules that result from observing the
behaviour of car drivers.
A good way to start investigating peoples’
opinions concerning the behaviour of autonomous
vehicles during an accident, is by extending the
thought experiment of the so-called “Trolley
Problem” in philosophy to smart vehicles, which
will sooner or later have to deal with similar
situations. The emerging “Driverless Dilemma”
according to Holstein and Dodig-Crnkovic (2018),
can be formulated as follows: “A self-driving vehicle
drives on a street at a high speed. In front of the
vehicle, a group of people suddenly blocks the street.
The vehicle is too fast to stop before it reaches the
group. If the vehicle does not react immediately, the
whole group will be killed. The car could however
evade the group by entering the pedestrian way and
consequently kill a previously not involved
pedestrian”.
In these mental experiments, participants are
asked to make a decision on behalf of the
autonomous vehicle as to who should be saved in the
accident. In this way, universal views emerge, which
could provide a solution to the problem of ethical
rules, on the basis of which autonomous vehicles
could be programmed in the future.
However, objections have been raised regarding
the effectiveness of such dilemmas. These objections
include the view that in real life conditions, vehicles
seldom have to deal with only two alternatives. The
possible actions are various and more complicated.
Moreover, these dilemmas are not considered
realistic. It is argued that it isn’t possible for
autonomous vehicles to have enough control to
choose who to rescue, but at the same time not have
enough control to completely avoid the accident.
Dilemmas are also treated as simplistic, as they
ignore factors such as legal aspects and liability
issues. (De Freitas et al., 2020).
In addition to the above, the questions posed by
the dilemmas include a limited number of possible
solutions, all of which are morally questionable. It
can be perceived as wrong to force people to make
such decisions through these mental experiments.
The driverless dilemma is often considered to be a
misguided approach that focuses attention on the
wrong side of the issue of autonomous vehicle
accidents. The research should not focus on who will
On Ethical Considerations Concerning Autonomous Vehicles
181

lose their lives, but on the complete avoidance of the
accident. Indeed, perhaps the most serious concern
against these dilemmas is the fact that they involve
the assumption that one will survive and one will be
killed, based on criteria which ignore that all people
are equal. In the simplest case a comparison is made
between different sizes of groups of people, but
many scenarios suggest making decisions based on
age, gender or social class of people. After all, if
decision-making on autonomous vehicles required
personal data to be taken into account, there would
arise an additional problem of privacy and personal
data protection, as a vehicle would require access to
all personal data (Holstein and Dodig-Crnkovic,
2018).
Even if the driverless dilemma could be solved,
another factor which nevertheless renders it
ineffective is the fact that there is no overall
established infrastructure that allows autonomous
vehicles to function properly yet. Whereas in a smart
city the autonomous vehicle will be able to obtain
detailed information about its environment and
choose the solution with the best result that
maximizes the benefit and/ or minimizes the
damage, one must consider that, until all cities
become smart cities, autonomous vehicles involved
in traffic will have to interact with human drivers.
However, the current mixed environment of vehicles
(smart and not) or locations (with and without smart
infrastructure) means that the decision-making of the
autonomous vehicle cannot be well-founded, due to
the fact that there is insufficient data. Therefore, the
inequality problem would include even more aspects
than it would have if there were already established
smart cities (Holstein and Dodig-Crnkovic, 2018).
In any case, these mental experiments are not
really intended to examine every aspect of a road
accident, but to focus only on ethical aspects in
order to investigate which extreme behaviours of a
vehicle would be accepted by the general public.
This goal is best achieved if the dilemmas are more
simply formulated, even if that means they become
less realistic. It should be borne in mind that non-
experts in artificial intelligence or ethical philosophy
are the majority and are the future buyers of
autonomous vehicles. Therefore, it is important to
find a way of communication between scientists and
the general public, which makes the simplicity of
these mental experiments a positive element. In
addition, the dilemmas manage to draw the public's
attention to the ethics of autonomous vehicles,
which is desirable, since progress in a field can only
take place if a corresponding interest exists. (De
Freitas et al., 2020).
2.2 Responses to the “Driverless
Dilemma”
Ethics of autonomous vehicles have attracted the
attention of many researchers, who seek to define
how such a vehicle should be designed. In theory
this subject has been approached among others by
studies such as Shariff et al. (2017) and Bissell et al.
(2018).
The study by Liu et al. (2019) shows that,
although the consequences of the crashes involving
an autonomous vehicle and a conventional vehicle
were identical, the crash involving the autonomous
vehicle was perceived as more severe, regardless of
whether it was caused by the autonomous vehicle or
by others and whether it resulted in an injury or a
fatality. The research by De Freitas and Cikara
(2020) revealed more negative reactions towards the
manufacturer of the autonomous vehicle, when a
vehicle caused damage deliberately.
According to the study by Gao et al. (2020),
most of the participants wanted to minimize the total
number of people who would be injured in a road
accident. It has also been concluded that most
drivers consider not only their own safety, but also
the safety of pedestrians, as they chose to hit an
obstacle rather than hit pedestrians. Choosing a
course with obstacles in order to protect a pedestrian
could also be considered as a way to minimize the
overall damage caused. Bonnefon et al. (2016) have
also noted that participants strongly agreed it would
be more moral for autonomous vehicles to sacrifice
their own passengers when this sacrifice would
result in minimizing the number of casualties on the
road. However, the same participants showed an
inclination to ride in autonomous vehicles that will
protect them at all costs. According to Liu and Liu
(2021) participants perceived more benefits from
selfish autonomous vehicles which protect the
passenger rather than the pedestrian, showing a
higher intention to use and greater willingness to pay
extra money for these autonomous vehicles.
The results of the research by Tripat (2020)
showed that, due to the shift in accountability,
autonomous vehicles seem to have also shifted
people's moral principles towards self-interest. In the
case of an autonomous vehicle, the control of the
actions of the vehicle by the human driver is limited,
so the responsibility for any harmful consequences
can be attributed to the autonomous vehicle. As a
result, it is possible for the passenger to ensure their
self-protection while exempting themselves from the
moral cost of causing damage to a pedestrian.
Therefore, it is expected that most people would be
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
182

willing to choose to cause harm to the pedestrian
when it comes to an autonomous vehicle.
The research of Bigman and Gray (2020) showed
that people would prefer to save a woman over a
man, a younger person over an older one, a person
with good physical health over a person with poor
physical health, a person of a higher social status
over a person of lower social status, a law-abiding
person over a delinquent person. Also, the
participants in the research would choose to save
the largest possible number of people, and they
would rather save the pedestrians than the
passengers of the vehicle. With the addition of a
third option, which allowed the two parties
partaking of the dilemma to be treated equally, it
was observed that the vast majority chose this
option, revealing that the general public wants
autonomous vehicles to treat people equally.
The paper by Li et al. (2019) presents three
principles that could serve as solutions to the ethical
problems of autonomous vehicles: the principle of
consciousness transformation, the principle of
responsibility distribution, and the principle of law
making. The principle of consciousness involves
teaching and giving the correct amount and type of
information to the people. The level of responsibility
distribution concerns both ethical and legal aspects.
Small disputes of responsibility can be resolved
through ethics, but complex and difficult judgment
disputes must be resolved through legal means,
which is why the law-making principle is needed.
3 METHODOLOGY
Although researchers have studied the moral
dilemmas of autonomous vehicles both theoretically
and practically, ethical issues have not yet been
resolved, since we can reach no definite conclusion
as to which actions of a vehicle would constitute
moral behaviour. The present analysis does not aim
to provide any recommendations regarding
particular principles on which the programming of
autonomous vehicles can be based. It focuses on
investigating the opinions of the public about
autonomous vehicles with different crash
behaviours, and how these opinions could be
considered before attempting to design any crash
algorithms.
On this basis, the main research questions on
which the present analysis is focused are the
following:
Who is considered responsible in case of an
accident with an autonomous vehicle?
How do people react to different scenarios
of the driverless dilemma?
In order to answer the above questions, a
quantitative survey was carried out through a
questionnaire of 24 closed-ended questions. The
survey was conducted between July and October
2021. Questionnaires were distributed electronically
via mailing lists and social media, and the filling out
was done by individuals residing in Greece. The
sample of individuals was random, so that they do
not have common characteristics and can represent
the general population of the country. Answers were
recorded from 266 participants.
Concerning the questionnaire’s structure, it
includes the following categories:
Demographic attributes (5 questions)
Autonomous vehicle liability issues (2
questions)
Thought experiments (17 questions), which
contains “Driverless dilemma - Possible
solutions” (5 questions), “Thought
experiment with forced choice” (6
questions), and “Thought experiment with
equal treatment option” (6 questions).
More precisely, in order to discover the
participants’ views on liability issues, participants
were asked if they would hold responsible for an
accident the owner of the vehicle, the vehicle itself
or rather the manufacturer of the vehicle. In
addition, they were asked if they would be willing to
take collective action against an autonomous vehicle
manufacturer, in the event of a road accident caused
by an autonomous vehicle.
With respect to the driverless dilemma, questions
were asked on whether the participants would
actively change the vehicle’s course or prefer to
remain inactive, whether the participants would
prefer a larger rather than a smaller group of people
to be saved, which group they would save, if one
group could be saved only with a violation of the
highway code, while the other could be saved
without violating the highway code and whether
they would prefer the vehicle to save its passengers
or the pedestrians. Questions relating to the thought
experiments also include scenarios of autonomous
vehicle accidents, in which the participants have to
decide who to save between two options: younger or
older, male or female, fit or in a bad physical
condition, law-abiding or demonstrating delinquent
behaviour, higher or lower social status person or
animal. In these choices, equal treatment is allowed
at first, but then the participants are presented with
the same questions with forced inequality.
On Ethical Considerations Concerning Autonomous Vehicles
183

Furthermore, the questionnaire in its introduction
section included a definition of the term “autonomous
vehicle” as well as detailed descriptions for each case
of the thought experiments. The above were
introduced in order to solve the problem of
participants’ unfamiliarity with the subject of the
present analysis, assuming that they have no previous
knowledge of autonomous vehicles.
4 RESULTS AND DISCUSSION
This section presents the results of the research.
Table 1 shows the demographic data of the
respondents. Regarding the gender, the participant
sample is almost divided in half. The majority of the
participants are under 29 years of age and live in a
big city/ capital. Most of the participants are
secondary education graduates and single.
Concerning liability issues, more participants
consider the owner of the vehicle responsible
(50.7%) rather than the manufacturer (44.4%). Very
few consider the vehicle itself responsible (4.9%),
probably because they realize that the vehicle is
making the decisions it has been programmed to
make. Results also have shown that people would be
willing to take collective action against an
autonomous vehicle manufacturer in the event of an
autonomous vehicle causing a road accident (60%).
Regarding the autonomous vehicle dilemma,
action and change of course were preferred, when
participants were faced with the choice to maintain
the vehicle’s course or change it (80.5%). Saving the
larger number of lives was also preferred (91.4%),
as well as observing the Highway Code, if one group
can be protected without violating it (75.6%).
The number of people who would prefer to save
the passenger in an accident is exactly the same as the
number of people who would prefer to save the
pedestrian. Not all people who prefer the pedestrian
being saved were consistent with their choice,
however most would indeed be willing to be
passengers to an autonomous vehicle which sacrifices
the passengers (54.1%). If most people who would
like to protect the pedestrian from the passenger were
reluctant to drive vehicles programmed to sacrifice
the passenger, then that would reveal a possible
obstacle to the adoption of autonomous vehicles that
are programmed with such ethical rules.
Furthermore, 92.9% of the participants chose to
save the younger person while 7.1% chose to save
the older when faced with forced inequality. With
equality allowed, 37.2% chose to save the younger
Table 1: Demographic attributes of respondents.
Gender Frequency Percentage (%)
Male 133 50.0
Female 131 49.2
Other 2 0.8
Age Frequency Percentage (%)
≤ 20 88 33.1
21-29 91 34.2
30-39 33 12.4
40-49 37 13.9
50-59 15 5.6
≥ 60 2 0.8
Place of residence Frequency Percentage (%)
Big city / capital
> 100000 inhabitants
160 60.2
Suburb 48 18.0
Small town
< 100000 inhabitants
24 9.0
Province
< 30000 inhabitants
34 12.8
Marital Status Frequency Percentage (%)
Single 205 77.0
Married 54 20.3
Divorced / Separated 6 2.3
Widow/er 1 0.4
Education Frequency Percentage (%)
Primary school graduate 6 2.3
Secondary school
graduate
146 54.9
Trade / technical /
vocational training
graduate
7 2.6
Bachelor’s degree 71 26.7
Mastert’s degree 34 12.8
Doctoral diploma 2 0.7
person, 1.1% chose to save the older and 61.7%
chose the equal treatment (Figure 1a).
In the case of forced inequality, 89.5% of the
respondents preferred to save the female pedestrian,
whereas 10.5% preferred to save the male
pedestrian. With equality allowed, 5.3% would save
the female, 0.3% would save the male, while 94.4%
would choose equal treatment (Figure 1b).
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
184
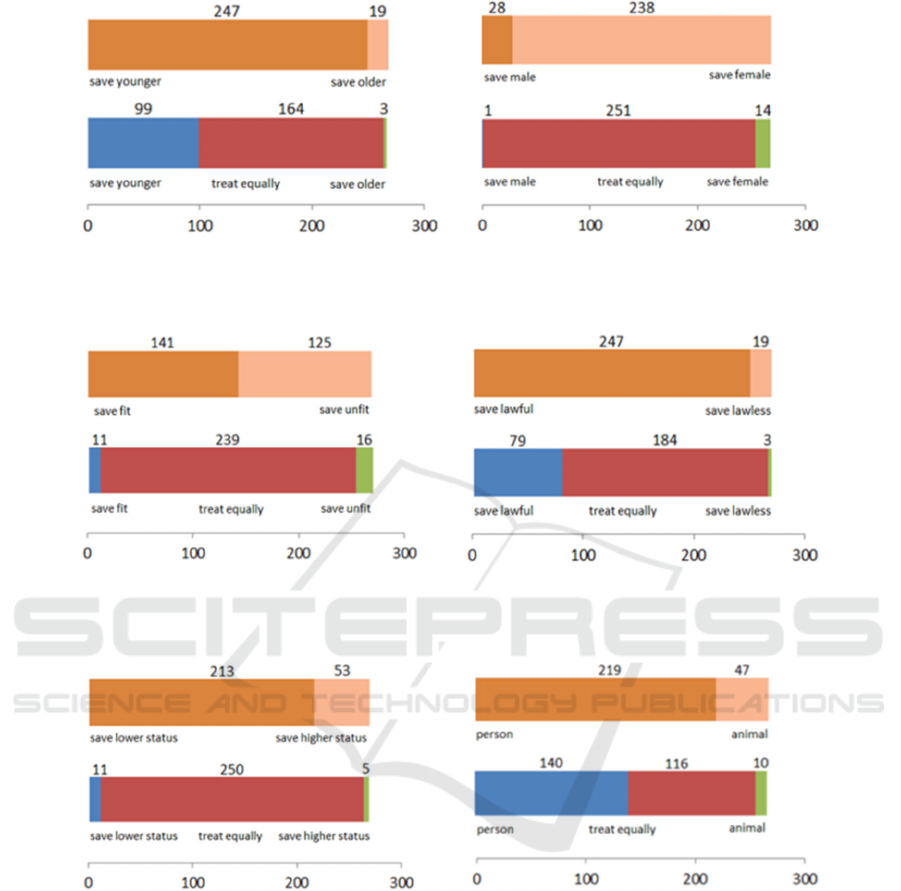
(a) (b)
Figure 1: Number of responses regarding (a) the choice between a younger and an older pedestrian, (b) the choice between
a male and a female pedestrian.
(a) (b)
Figure 2: Number of responses regarding (a) the choice between a pedestrian in good physical condition and a pedestrian in
a bad physical condition, (b) the choice between a law-abiding pedestrian and a pedestrian with delinquent behaviour.
(a) (b)
Figure 3: Number of responses regarding (a) the choice between a pedestrian of lower social status and a pedestrian of
higher social status, (b) the choice between a person and an animal.
Moreover, 53% of the respondents find it
preferable to protect a person with a good physical
condition and 47% would choose in favour of a
person with a bad physical condition, when no
equality is allowed. If equality is allowed, 4.1%
would save the fit person, 6% would save the unfit
person and 89.9% would treat them equally (Figure
2a).
Faced with forced inequality, 92.9% of the
participants chose to save the lawful person, whereas
7.1% chose to save the lawless one. With equality
allowed, 29.7% would save the lawful, 1.1% would
save the lawless, while 69.2% would prefer equal
treatment (Figure 2b).
In addition, 80.1% of the participants chose to
save the pedestrian of lower social status, while
19.9% chose to save the pedestrian of higher social
status in the case of forced inequality. With equal
treatment allowed, 4.1% chose to save the pedestrian
of lower social status, 1.9% chose to save the
pedestrian of higher social status and 94% chose
equality (Figure 3a).
On Ethical Considerations Concerning Autonomous Vehicles
185

Furthermore, 82.3% of the participants chose to
save the human while 17.7% chose to save the
animal when faced with forced inequality. With
equality allowed, 52.6% chose to save the human,
3.8% chose to save the animal and 43.6% chose
equal treatment (Figure 3b).
Overall, it has been observed that people show a
preference for equal treatment of individuals. Equal
treatment was not chosen by the majority only in the
case of the human vs. animal dilemma, in which
saving the person over animal was preferred. When
there is no equal treatment option, the research has
revealed a universally strong preference for saving
younger people over older people, women over men,
law-abiding people against offenders, people of
lower social status over people of higher social
status and humans over animals. It also seems that
there are weaker preferences for saving people who
are in better physical condition than those who have
worse physical condition.
Chi-squared test shows that there is a correlation
between one’s gender and the gender one chooses to
save when there is no choice of equal treatment
(p=0.004996927<0.05). There is also a correlation
between one’s age and the age one chooses to save
when there is no choice of equal treatment
(p=0.004225882<0.05).
At this point, it would be of interest to explore
the relation of the present research to previous
studies. The present study combines the questions
raised by Gao et al. (2020) with the dilemma cases
presented in Bigman and Gray (2020) and adds
questions of liability to them. Compared to the
research by Bigman and Gray (2020), the reactions
of the respondents participating in our research were
similar concerning gender, age, fitness and
lawfulness. However, our participants seem to deem
saving people of lower social status as more
favourable. Also, our participants prefer to take
action during a critical situation on the road (choose
actively whether to change course or remain on the
same course instead of abstaining from making a
decision), whereas the participants of the research by
Bigman and Gray (2020) would choose to remain
inactive. Our participants’ responses also confirm
what the study by Gao et al. (2020) has shown,
namely that people generally choose to save the
greater number of people and that they are
concerned about the safety of the pedestrians, often
choosing to protect the pedestrian instead of the
passenger.
5 CONCLUSIONS
Autonomous vehicles have the potential to offer
great advantages from a social, economic and
environmental point of view as long as the ethical
issues related to them are resolved. On this basis, the
purpose of the present study was to investigate
peoples’ views concerning which behaviours of
autonomous vehicles in critical situations and road
accidents should be deemed acceptable.
According to the results of the present analysis,
participants believe first the owner and next the
manufacturer to be responsible for faults in the
behaviour of the vehicle. That implies that people
regard the owner as accountable for mistakes that
result in a crash, and at the same time hold the
manufacturer of the vehicle responsible for
minimizing the unreliability of the software. In
addition, most respondents thought that autonomous
vehicles should make utilitarian decisions and
behave in a way which ensures the greater good.
Specifically, saving the greater number of people
and sacrificing the passenger in favour of the
pedestrian are actions which seem to be perceived as
more acceptable. A particularly important finding
concerns the strong preference for equal treatment.
Results suggest that people consider unbiased
behaviour on the part of the vehicle more justifiable.
Regarding the limitations of our research, only a
few answers were recorded by participants over 50
years of age. Although that means that the
participants may not be representative of the general
population, they are considered to at least represent
the first buyers of autonomous vehicles. However, it
would be appropriate to repeat the research in a
larger population, to examine whether the findings
remain consistent. Furthermore, the majority of
respondents are not familiar with the subject of the
study, due to the fact that autonomous vehicles are
not expected to become a reality by 2025, and
therefore, it would be appropriate for future research
to take into account the lack of information and
experience of participants. Finally, the present work
has addressed only a small range of ethical issues
that are expected to arise with the introduction of
autonomous vehicles.
Future research should be further extended to
other contexts, such as the development of
technology acceptance models related to ethics of
autonomous vehicles, by revealing peoples’
perceptions of morality. Some extra recommended
questions, which future research could explore, is
the authorities' role in making the owner and
manufacturer of autonomous vehicles liable towards
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
186

their behaviour and the correlation between the
dilemma responses and the willingness of the
participants to own an autonomous vehicle.
REFERENCES
Bigman Y.E., Gray K. (2020), Life and death decisions of
autonomous vehicles, Nature 579, E1–E2.
Bissell D. ,Birtchnell T., Elliott A., Hsu E.L. (2018),
Autonomous automobilities: The social impacts of
driverless vehicles. Volume: 68 issue: 1, page(s): 116-
134, doi:10.1177/0011392118816743.
Bonnefon J.F., Shariff A., Rahwan I. (2016), The Social
Dilemma of Autonomous Vehicles. Science. 352.
10.1126/science.aaf2654.
De Freitas J, Cikara M. (2020), Deliberately prejudiced
self-driving vehicles elicit the most outrage.
Cognition.208:104555.doi:10.1016/j.cognition.2020.1
04555. Epub 2020 Dec 25. PMID: 33370651.
De Freitas J., Censi A., Di Lillo L., Anthony S.E., Frazzoli
E. (2020), From Driverless Dilemmas to More
Practical Ethics Tests for Autonomous Vehicles,
doi:10.31234/osf.io/ypbve
Gao Z., Sun Y., Hu H., Zhang T., Fei Gao F. (2020),
Investigation of the instinctive reaction of human
drivers in social dilemma based on the use of a driving
simulator and a questionnaire survey, Traffic Injury
Prevention, 21:4, 254-258, doi: 10.1080/15389588.20
20.1739274.
Gless S., Silverman E., Weigend T. (2016), If robots cause
harm, who is to blame? Self-driving cars and criminal
liability, New Criminal Law Review 1 August 2016;
19 (3): 412–436.
Holstein T., Dodig-Crnkovic G., Patrizio Pelliccione P.
(2018), Ethical and Social Aspects of Self-Driving
Cars, arXiv:1802.04103.
Li G., Li Y., Gao Z., Chen F. (2019), Ethical Thinking of
Driverless Cars, In Proceedings of the 2019
International Conference on Modern Educational
Technology (ICMET 2019). Association for
Computing Machinery, New York, NY, USA, 91–95.
Liu P., Du Y., Xu Z. (2019), Machines versus humans:
People’s biased responses to traffic accidents
involving self-driving vehicles, Accident Analysis &
Prevention, Volume 125, Pages 232-240, ISSN 0001-
4575.
Liu P., Liu J. (2021), Selfish or Utilitarian Automated
Vehicles? Deontological Evaluation and Public
Acceptance. International Journal of Human–
Computer Interaction. Volume 37, Pages 1231-1242,
doi: 10.1080/10447318.2021.1876357.
Lohmann M.F. (2016), Liability Issues Concerning Self-
Driving Vehicles, European Journal of Risk
Regulation, Cambridge University Press, 7(2), 335-
340. doi:10.1017/S1867299X00005754.
Luzuriaga M., Heras A., Kunze O. (2019), Hurting Others
vs Hurting Myself, a Dilemma for our Autonomous
Vehicle.
Schoettle B., Sivak M. (2015), A preliminary analysis of
real-world crashes involving self-driving vehicles,
University of Michigan: Transportation Research
Institute. UMTRI-2015-34.
Shariff A., Bonnefon J.F., Rahwan I. (2017).
Psychological roadblocks to the adoption of self-
driving vehicles. Nature Human Behaviour. 1.
10.1038/s41562-017-0202-6.
Tripat G. (2020), Blame It on the Self-Driving Car: How
Autonomous Vehicles Can Alter Consumer Morality,
Journal of Consumer Research, Volume 47, Issue 2,
August 2020, Pages 272–291.
Yang J., Coughlin J. F. (2014), In-vehicle technology for
self-driving cars: advantages and challenges for aging
drivers, International Journal of Automotive
Technology, Vol. 15, No. 2, pp. 333−340, DOI
10.1007/s12239−014−0034−6.
On Ethical Considerations Concerning Autonomous Vehicles
187
