
An Application with Jetson Nano for Plant Stress Detection and
On-field Spray Decision
Marcos A. de Oliveira Jr.
1,2
, Gregory Sedrez
1
,
Guilherme de Souza
1
and Gerson Geraldo H. Cavalheiro
1
1
Programa de P
´
os-Graduac¸
˜
ao em Computac¸
˜
ao, Universidade Federal de Pelotas, Pelotas/RS, Brazil
2
Instituto Federal de Educac¸
˜
ao, Ci
ˆ
encia e Tecnologia Farroupilha, Santa Maria/RS, Brazil
Keywords:
Decision Support System, Agro-sensor, Time Series, Jetson Nano, Smart Farm.
Abstract:
Increasing field productivity is not just a financial need, but also a social issue. Several technologies converge
to promote food production and, in this context, the fog computing paradigm can support the development of
solutions for precision agriculture. This paper proposes an application of the Jetson Nano device, embedded
in an agricultural spraying implement. This device supports the decision on irrigation activity, based on data
collected by sensors distributed in the field. The sensors read information about the plant’s stress level from
electrical signals and the Jetson Nano enables real-time analysis, through machine learning algorithms, to
manage the product spray rate, according to the condition of the crop. Initial studies validated the proposed
solution on an experimental basis, showing that the device can be an alternative for this purpose, since it can be
used efficiently in machine learning tasks from data collected by the sensors. The experiment also highlighted
some limitations of the proposed solution, such as the importance of observing the conditions of the system as
a whole, its context and environment, in order to improve performance in spraying process.
1 INTRODUCTION
Agriculture is the fundamental basis for human sur-
vival, however, in recent years, some factors arising
from the evolution and globalization of society are
impacting agricultural production, restricting the de-
velopment of the sector and worrying producers. As
shown in (Zhou et al., 2011), the three main reasons
for these concerns are: (i) the aging of the agricul-
tural population, migration from rural to urban areas
and, consequently, a reduction in rural labor; (ii) large
constructions invading rural spaces and, therefore, re-
ducing the production area; and (iii) increased climate
change, such as temperature, rainfall and soil mois-
ture, which affect crop growing conditions in unpre-
dictable ways.
Internet of Things (IoT) and Artificial Intelligence
(AI), among other innovative technologies, have been
promoting major changes in the agricultural scenario
(Misra et al., 2020). These technologies not only
solve the problems related to the increased demand
for food and environmental pollution caused by the
use of pesticides without proper control, but also pro-
mote intensely the continuous development of agri-
culture. The increased use of IoT devices in agricul-
ture has led to a huge growth in the use of sensors and
the growing number of data to be processed. Allied to
these technologies, the concepts of Edge Computing
(Shi et al., 2016) and Fog Computing (Bonomi et al.,
2012) emerge. These paradigms intend to meet appli-
cation requirements, such as the need for greater re-
liability, hardware weight (size, location and number
of machines), and network and power consumption
(Byers, 2017). This model allows the investigation of
data processing performance close to the place where
they are produced and/or needed (Baller et al., 2021).
Since there is less processing power in edge and
fog devices, applications in these contexts are instan-
tiated in a specialized manner, dealing with a sin-
gle problem. In recent years, one of the contexts in
which research in edge and fog computing has in-
creased was precision agriculture, due to the great
impact caused by technology in the agricultural sec-
tor. The Smart Farms concept has been leveraged in
recent years by IoT devices. Its use allows farmers
to receive near real-time data about farm conditions.
With the smart farm concept under construction, Arti-
ficial Intelligence (AI) strategies (Li et al., 2018) have
been incorporated into the solutions. From the po-
tential to reduce the need for human interference in
field management processes, these strategies in gen-
eral need some level of edge computing, so the devel-
Oliveira Jr., M., Sedrez, G., de Souza, G. and Cavalheiro, G.
An Application with Jetson Nano for Plant Stress Detection and On-field Spray Decision.
DOI: 10.5220/0010983900003118
In Proceedings of the 11th International Conference on Sensor Networks (SENSORNETS 2022), pages 215-222
ISBN: 978-989-758-551-7; ISSN: 2184-4380
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
215

opment of solutions goes through the search for de-
vices capable of performing these processes. Thus,
the key is to identify edge devices that have hard-
ware resources capable of processing AI techniques.
Among the edge devices available on the market, we
have the Jetson Nano (Nvidia, 2021) as a possible so-
lution. This device is a embedded computing board
from NVidia, which contains a low power system and
hardware resources like GPU, designed for accelerat-
ing machine learning applications.
Therefore, this work investigates the feasibility of
using the edge device Jetson Nano for the implemen-
tation of AI techniques, focusing on the identification
of the stress level in bean plants. This paper extends
previous results of (de Toledo, 2019) in which plant
stress state classification techniques were successfully
performed using neural networks and machine learn-
ing. The main contribution intended is to validate the
use of the mentioned device for an application that
measures the amount of agricultural inputs, water, fer-
tilizers, pesticides, etc., in an agricultural implement.
This is possible through the analysis of data collected
by sensors spread across different regions of the crop,
which serve as input to classification algorithms that
indicate the stress level of plants in that region. So,
based on that stress level, each region receives a spe-
cific amount of spray. From the experiments carried
out, it was possible to validate an application model
with the Jetson Nano device for the detection of stress
in bean plants, which enables the use of this informa-
tion for real-time decision-making in the spraying of
agricultural products in the field.
The paper is organized as follows: Section 2
presents works related in precision agriculture; Sec-
tion 3 presents the proposed application design for
practical use and Section 4 the case study developed
and initial experiments, as well as a discussion of the
results. The conclusions and possibilities for future
work are presented in Section 5.
2 RELATED WORK
The use of IoT devices has allowed a lot of achieve-
ments, since the intelligent objects connected to sen-
sors allow their interaction with the physical and log-
ical world without the need for human intervention.
However, even if the Internet itself is not needed,
some form of communication support for the edge/-
fog devices must be available.
In (Saraf and Gawali, 2017), an intelligent agri-
cultural irrigation system, monitored via an Android
smartphone, is proposed. Field communication sup-
port is provided by the Zigbee protocol, which en-
sures communication between sensors and a base sta-
tion. The system performs real-time readings that are
presented in a web-based interface to the user. So,
the user interaction can be through their smartphone,
controlling the water distribution. In (Kamilaris et al.,
2016), a framework capable of connecting and mon-
itoring numerous sensors is presented. The collected
data, as well as the decisions made by the sensors, are
collected by a central database and then made avail-
able in a cloud. AgriSys (Abdullah et al., 2016), using
Fuzzy logic, explores the cloud in the same way, but
deals with the desert’s challenge: dust, infertile sandy
soil, constant wind, very low humidity and extreme
variations in daytime and seasonal temperatures.
In the works cited, for its full functionality, the use
of network resources is necessary, either for the col-
lection of monitored information or for sending com-
mands to perform actions on the field. However, pro-
viding access to network services in the agricultural
context is expensive, mainly due to the use of en-
ergy for communication on farms with a large area
to be covered. Considering these aspects, solutions
that minimize network consumption have emerged in
the context of precision agriculture.
As an alternative, WSN (Wireless Sensor Net-
work) type network protocols and their low-power
and/or long-range hardware resources were devel-
oped, such as the LoRA protocol. This protocol has
been used in places where other networking tech-
nologies are not supported. However, the low band-
width offered is a characteristic of the protocol, which
must be considered when designing solutions. In (Gia
et al., 2019) a case study is presented using LoRA to
establish an edge layer connecting the sensors to each
other and to a gateway. The gateway then regroups
the information collected in its coverage region and
forwards it, in a single message, to a concentrator.
In order to reduce the need for the use of net-
work resources, recently, edge computing concepts
have been introduced as an alternative to cloud com-
puting and aim to maximize processing close to the
data generation point. Thus, a new generation of ap-
plications for precision agriculture has been exploring
the use of machine learning techniques embedded in
edge devices, to distribute data processing across ap-
plication layers and reduce the transmission of infor-
mation between them.
Also, popular ML techniques (Machine learning)
have been employed in systems. Such techniques in-
clude K-NN (K-Nearest Neighbors, SVM (Support
Vector Machines), ANN (Artificial Neural Networks)
among others, which have been shown to be of great
value. Its effects and applicability are diverse, in
(Kamilaris and Prenafeta-Bold
´
u, 2018), they demon-
SENSORNETS 2022 - 11th International Conference on Sensor Networks
216

strate the different algorithms that have been used in
search of the best result in the agricultural environ-
ment. Applications are focused on tasks such as an-
alyzing plant images for anomalies, fruit counting,
weed detection and even fire outbreaks. Moreover,
inadequate spraying tends to mistreat plants, pollute
water near the harvest and below ground. In (Liakos
et al., 2018), he demonstrates that it is possible to have
even greater control over the amount of spraying re-
quired and the size of the sprayed area.
Few proposals provide more information about
hardware or even propose one that can serve from
small to large farms. In (Imran et al., 2020), the au-
thors present a review of the main embedded devices
found on the market with processors capable of run-
ning AI algorithms at the edge. In (Proietti et al.,
2021), the authors present a study that aims to develop
a system based on Deep Learning that will be applied
in greenhouses in order to detect anomalies in plant
growth. To develop the solution, embedded devices
NVIDIA Jetson Nano and Raspberry Pi 4 Model B
were used, capable of using a complete deep learning
framework such as TensorFlow (Abadi et al., 2015).
In (Kawai and Mineno, 2020), the validation of an au-
tomatic irrigation system in tomato plantations using
edge AI and the embedded devices NVIDIA Jetson
Nano and Raspberry Pi 3 Model B is performed.
All these possibilities for the application of new
technologies in agriculture are having promising re-
sults and enabling the growing use of IoT and AI edge
technologies. Thus, our motivation in this work is
to validate a solution for detecting the stress level in
common bean, using edge devices for the execution
of AI algorithms in model training and data classifi-
cation tasks.
3 PROPOSED SOLUTION
ARCHITECTURE
The proposed solution is based on the previous work
documented in (de Toledo, 2019), which uses the
black bean BRS-Expedito species for a laboratory ex-
periment. Like any plant, beans are subject to multi-
ple environmental variations, some of which generate
stress, such as lack of water resources and soil salin-
ity. These stressful situations lead to financial losses.
However, the manifestation of stress can be observed
by reactions involving changes in electrical activity in
the plant (Maffei and Bossi, 2006).
In (de Toledo, 2019) experiments were carried out
to monitor seedlings submitted to induction stress,
with application of solutions that generate situations
of lack of water and salinity. To induce stress in the
plants, three solutions were used: NaCl, Polyethylene
glycol and NaCl+Polyethylene glycol. For each type
of stress, 30 experiments were performed. Each ex-
periment monitored the electrical activity of 3 individ-
uals for 4 consecutive hours, two hours before appli-
cation of the solution and two hours after. The capture
of electromas from the plants was carried out with
electrodes inserted in the plant, with a reading rate
of 62.5 Hz. The time series produced, for each two-
hour range, has, therefore, 450,000 readings (elec-
tromas). These data were input to classification al-
gorithms, using traditional computational resources.
In the methodology used, each sequence of 30,000
points, equivalent to 8 minutes of monitoring, was
represented by three values: average, maximum and
minimum of the values captured in the period. The
interval of 30 thousand points was adopted, accord-
ing to the author, as it presents a better result in terms
of accuracy. According to the discussion presented,
the results showed a high success rate in recognizing
the plant’s stress situation.
Extending this idea to the field scenario, a solu-
tion is proposed for monitoring a crop, as well as col-
lecting and processing data through the Jetson Nano
device embedded in an agricultural implement. The
base model of the designed application is shown in
Figure 1, where, in a crop, a set of plants is selected
for monitoring, in a distributed way, allowing each
monitored point to represent the situation of the sur-
rounding plants. In detail, the monitored plant and
the monitoring device are presented. This device is
capable of storing the time series that represents the
evolution of the plant’s electromagnetic signal. This
device is also capable of responding, via a wifi net-
work, to the request to send the collected data.
Eventually, this agricultural implement circulates
over this plantation, spraying agricultural inputs such
as fertilizer or pesticides, or even water. The amount
of product to be sprayed in a given area can be iden-
tified in real time by rating the stress level of the in-
dividual monitored in that region. A device on this
implement requests, via a wifi network, information
from the plant being monitored in the different re-
gions to calculate the amount of product needed in
each region. Also, if available and depending on the
application, meteorological data can be used in the
decision-making process to complement the informa-
tion available for analysis.
Among the small board options to meet the objec-
tives of this work, the option chosen was to use the
NVIDIA Jetson Nano coupled to the agricultural im-
plement. The choice was based on the wide use of this
device embedded in edge solutions for agriculture, ac-
cording to related works, which motivated the acqui-
An Application with Jetson Nano for Plant Stress Detection and On-field Spray Decision
217

Figure 1: Proposed application model.
sition of this hardware in this research project. Basic
technical specifications of the device can be found on
the supplier’s website (Nvidia, 2021). This device is
focused on meeting the recent demands of handling
data at the edges. With a GPU for processing, this
device is capable of supporting the execution of pro-
grams with great processing needs, such as image pro-
cessing, computer vision and deep learning, as is the
case in this work, with low energy consumption (be-
tween 5 to 10 watts).
Furthermore, this type of device can be easily in-
tegrated into an agricultural implement since its re-
duced dimensions do not imply adjustments to the
machinery structure. In fact, this equipment does not
necessarily need to be permanently attached to an im-
plement, which can enable the use of the same device
in different implements. This can be specifically ad-
justed according to different aspects such as machine
model and number of devices available.
Given its characteristics, the Jetson Nano meets
the four major needs, mentioned above, related to the
concept of edge computing, such as reliability, hard-
ware weight and low energy consumption. The other
items that make up the infrastructure shown in Fig-
ure 1 are not detailed in this article due to space lim-
itations. This paper documents the evaluation of the
Jetson Nano to determine if this device makes the pro-
posed solution feasible within this scenario.
4 METHODOLOGY AND
TECHNICAL FEASIBILITY
In general, the main objective of the work is to es-
tablish a proof of concept for the use of the Jetson
Nano device in agricultural applications to processing
data sensed by IoT devices. The data were stored in
a time series format and used for decision-making in
spraying tasks, through machine learning algorithms.
Thus, it is intended to identify the feasibility of using
an equipment embedded in an agricultural implement
to, during its operation, in real time, identify the stress
level of bean plants and make a decision regarding the
spraying of inputs on the field.
To validate the proposed solution, a bench situa-
tion was simulated, using real data from a previous
agricultural experiment, seeking to observe the per-
formance of the Jetson Nano device for the avail-
able data set, as well as designing a real application
through use that device. Next, the observed perfor-
mance of the Jetson Nano as an option for on-board
equipment is presented, as well as a discussion of the
impacts of this solution. All data considered in the
present study are those collected in the experiment
documented in (de Toledo, 2019).
4.1 Implementation of Classification
Algorithms
The time series that represent the data collected from
the plants are stored in a text file, with one sample
per line, and preprocessed, transformed into triples,
as mentioned above, to reduce the data volume. The
result obtained is a lower processing demand for the
classification algorithms, with no loss in result qual-
ity. These values are stored in a spreadsheet in .csv
format, where each line represents a measurement
range, with the first three columns corresponding to
the minimum, average and maximum values of the
range. In model training, the fourth column informs
if the plant has any stress (1 means stress and 0 no
stress).
The collected data were used in the training of
classifier models to identify the substances. The algo-
SENSORNETS 2022 - 11th International Conference on Sensor Networks
218

rithms used were K-NN, SVM and ANN. The choice
was made based on the investigation of solutions typ-
ically used for these scenarios, and, for the purpose of
this article, for performance analysis, all algorithms
were used based on default parameters. The imple-
mentations were in Python, using two machine learn-
ing libraries: Scikit-learn (Pedregosa et al., 2011) in
the first two and TensorFlow (Abadi et al., 2015) for
the other.
To measure the classification accuracy, the input
data set (around 15,000 entries) was divided: 70% of
the data were used in the model training and 30% for
the accuracy test. With regard to classification accu-
racy, the results obtained with K-NN and SVM showed
the best results, reaching 70% and 60%, respectively,
of accuracy, while the ANN had 54%. In this step, all
the algorithms were used with the standard parame-
ters of the mentioned libraries, that is, in this first mo-
ment, the algorithms were not tuned, since the initial
results were considered interesting. The focus here is
to analyze the performance of the algorithms in terms
of execution time for training models and for classi-
fying a new input.
After measuring the performance in terms of ac-
curacy, we focused on identifying the feasibility of
the solution in relation to the time needed to clas-
sify a new sample. In this implementation, using the
Time library, two timestamps were set, marking the
start and the end of the execution. The time differ-
ence between the two points then corresponds to the
time needed for classification. To manipulate the data
sets, Pandas data analysis and manipulation tool (Pan-
das Development Team, 2020), one of the most popu-
lar open source library in this domain for Python, was
used. Algorithm 1 presents the code used to measure
the time spent in classifying a new entry by a model
trained with the K-NN algorithm. The text1.csv file
(line 6) contains the collected data.
Within the measured time (between lines 5 and
14), the following tasks are considered: data import
(line 6), model training (lines 10 and 11) and classi-
fication of a new point (line 12). Now, 100% of the
available inputs are used for training, and only one
point is predicted (line 15). The implementation with
the SVM algorithm follows the same logic and code
structure. For the implementation of the ANN was
used also the same code structure, but adding the li-
brary Keras (Chollet et al., 2015) to the aforemen-
tioned libraries. In short, the ANN was composed of
three layers, with 3, 5 and 5 neurons each, relu ac-
tivation method, Stochastic Gradient Descent (SGD)
optimizer and trained in 100 epochs. Due to space
limitations, the complete codes are not presented in
this paper, but can be made available by contacting
Algorithm 1: K-NN measurement.
1 i mpor t p a n d a s a s pd
2 from s k l e a r n . n e i g h b o r s i mp or t
K N e i g h b o r s C l a s s i f i e r
3 i mp or t t i me
4
5 s t a r t = t i me . t ime ( )
6 d a t a s e t = pd . r e a d c s v ( ’ t e s t 1 . c s v ’ )
7 d a t a = d a t a s e t . i l o c [ : , 0 : 3 ] . v a l u e s
8 c l a s = d a t a s e t . i l o c [ : , 3 ]
9
10 knn = K N e i g h b o r s C l a s s i f i e r (
11 n n e i g h b o r s =5 ,
12 m e t r i c = ’ m in ko wski ’ ,
13 n j o b s = 2 )
14 knn . f i t ( d a t a , c l a s )
15 knn . p r e d i c t
( [ [ − 3 63 4 6 4 . 0 , − 23 7 18 . 2 , 1 2 6 3 4 3 . 0 ] ] )
16
17 end = t i me . t i me ( )
18
19 p r i n t ( ” t i me : ” )
20 p r i n t ( end − s t a r t )
the research group.
Table 1 presents the times taken by the classifica-
tion algorithms, both on a desktop computer and on
the Jetson Nano. The times correspond to an average
of 30 runs, where the distribution of samples corre-
sponds to normal. After the executions, the system
was always restarted, in order to guarantee a standard
execution situation, avoiding that the consequences
of a execution, such as the temperature of the com-
ponents, could influence the other executions and,
consequently, cause differences in performance. The
desktop processing was done entirely in CPU, while
the Jetson Nano used the GPU. The desktop times (In-
tel i5, 2/4 colors/threads, 8 GB RAM) are presented
illustratively, aiming to identify the distance of the
processing times obtained with the Jetson Nano to a
standard desktop computer configuration.
4.2 Performance Analysis and
Discussion
Regarding classification accuracy, K-NN and SVM
presented better classification of the stimuli to which
the bean plants were submitted in the bench experi-
ments. ANN, on the other hand, had lower accuracy
indices. A more in-depth study of the parameters ap-
plied to classification algorithms is considered neces-
sary in order, in a tunning process, to identify the best
configuration for the application in question. How-
ever, considering neural networks, it is a fact that a
greater amount of data in the training stage may re-
An Application with Jetson Nano for Plant Stress Detection and On-field Spray Decision
219
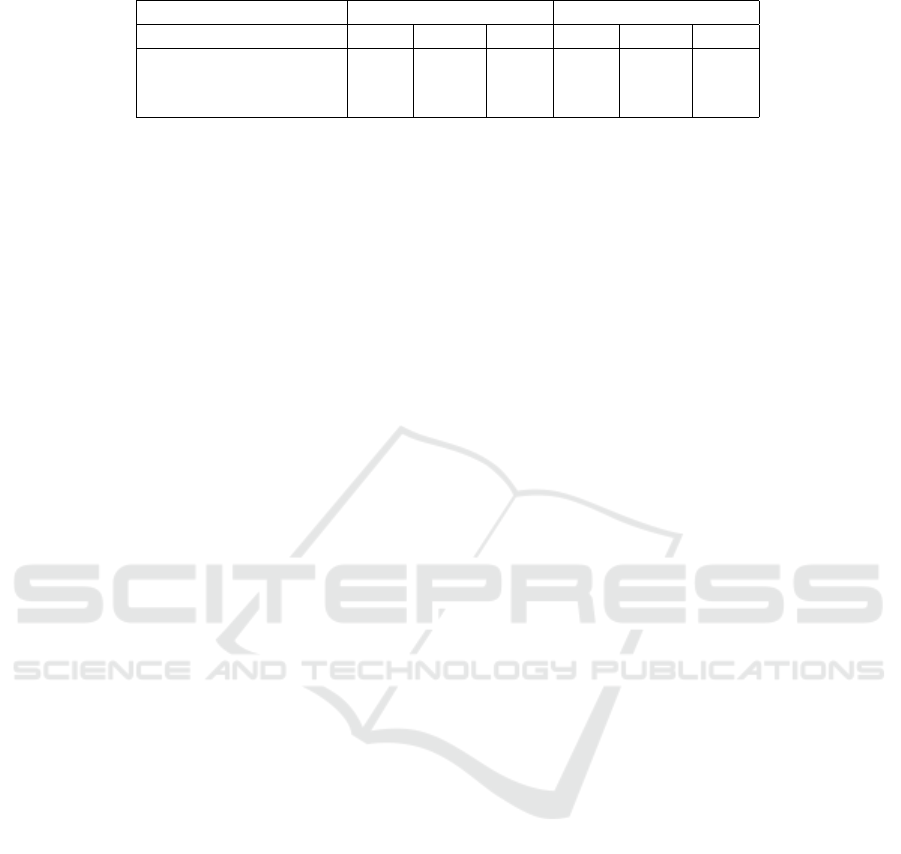
Table 1: Average time of algorithm executions (in seconds).
Device Desktop Jetson Nano
Algorithms ANN K-NN SVM ANN K-NN SVM
NaCl 0.14 0.11 0.05 2.90 0.15 0.20
Polietilenoglicol 0.13 0.11 0.06 3.00 0.14 0.19
NaCl+Polietilenoglicol 0.14 0.12 0.20 3.00 0.16 0.70
flect better classification success rates. This aspect
is relevant, because the K-NN and SVM algorithms
need the training data to be available, and to be ma-
nipulated, at each new classification. Thus, can be
considered valid to perform the prediction time anal-
ysis in the ANN algorithm, since for this network it is
not necessary to access the training base to perform a
new prediction. The consequence is a smaller amount
of memory needed on a device in the fog, a desirable
requirement in this type of application.
Regarding the practical application of the pro-
posed solution, it is necessary to analyze the impact of
classification execution times in the real world, since
the average speed of an agricultural implement in the
field is less than 15 km/h, or 4 m/s. It is observed that
the average execution times of the algorithms on the
Jetson Nano are, in most cases, less than 0.2 seconds,
which is equivalent to a displacement of 0.8 m. Thus,
these results validate the use of the device for the pur-
pose, as it is capable of dealing specifically with the
classification task in almost real time.
However, a significant problem was perceived in
the task of collecting and preprocessing the data,
which took a considerable time slice of 54 seconds,
considering a data entry of 450,000 samples, at inter-
vals of 30,000 samples, as detailed above. In terms of
displacement, the agricultural implement would have
traveled more than 200 m, moving away from the
region where the measurement was taken. In addi-
tion, the communication times between the sensor and
the device embedded in the implement must also be
added to the times presented.
Regarding communication, let’s consider a LoRa
(Long Range) (Alliance, 2015) network, quite pop-
ular as network infrastructure in smart farm applica-
tions, with an average range of 15 km in open areas
and transmission rate between 0.3 to 50 Kbps. There-
fore, from the technical specifications of this network
model, it is possible to observe that, even with the
high volume of transmitted data, the proposed solu-
tion is valid. If we consider a median value for the
transmission rate of 25 Kbps, the time to send data
(6 MB) is around 240 seconds, which represents a
displacement of less than 1 km, that is, the imple-
ment will still be within the network’s coverage area.
In this way, the machinery could start data collection
and classification when it is at least that distance from
the spray application point.
As the proposed scenario has an experimental
character, it is possible that we have variations in the
field area that each sensor will cover. However, given
the long-range coverage of the Lora network, there is
good scope for a project to deploy sensors within a
significant coverage radius.
Furthermore, seeking to overcome these observed
limitations, improvements can be investigated in the
sense of: reducing the speed of the implement; de-
crease the volume of data transmitted (preprocessing);
or still, use an extra device, in the field, as a gateway,
for data preprocessing, before the implement action.
The first and possibly the simplest alternative to
ensure that the proposed solution works is a decel-
eration of the agricultural implement, to increase the
time available for data reception, training and classi-
fication. For this, however, it is necessary to analyze,
together with experts in the agricultural area, what is
the impact of this lower speed on the cost of the activ-
ity, in terms of fuel consumption and autonomy, given
a consequent increase in time to cover large areas of
farming.
Regarding the reduction of data volume, the fol-
lowing possibilities can be investigated: data com-
pression, through algorithms that are supported in
edge devices; or even the decrease in the frequency of
data collection. For the first, the main challenge is to
find information compression techniques that do not
affect the efficiency of classification models, trained
from compressed data. Previous studies (de Toledo,
2019) and (Pereira et al., 2018) indicate good classifi-
cation indices, by neural networks, using compressed
representations of the time series. In this case study,
where the database provided corresponds to 450,000
samples (6 MB), the compact representation has only
15 triples of numerical data, totaling 180 bytes. The
indication, therefore, is that the device coupled to the
sensor in the bean plant has enough intelligence to
compose this compact representation of the time se-
ries. As a positive aspect of this solution, the need
for storage on this device is reduced. For the sec-
ond, there is the same concern regarding the impact
of training models with a smaller data set. As the fre-
quency is reduced, less information will be available,
so it must be observed whether the classification will
not be harmed by this situation.
SENSORNETS 2022 - 11th International Conference on Sensor Networks
220

Within the scope of our group’s research, ad-
vances are also being sought in terms of data vol-
ume reduction. Recently, the work published in
(Oliveira Jr et al., 2021) presented contributions in
the search for time series approximation techniques.
This work carried out in parallel contributed not only
with applicable approximation techniques, but also
with the investigation of which approximation tech-
niques can be used in combination with classification
algorithms, without loss of data quality due to volume
reduction.
Another possible solution is to use a central (gate-
way), installed in the field as well. This central would
be in charge of processing the data and passing on to
the agricultural machinery only the amount of input
to be applied and in which area it should be applied.
However, this may imply the use of a system with
GPS to control the areas, which has become quite
common in newer equipment. As the data packets to
be sent to this gateway, and from the gateway to the
implement, are small, it would not have much impact
on transmission time. A single gateway can receive
data from thousands of devices and forward it to the
network server. Depending on the topology condi-
tions of the deployed network, a single gateway can
cover a radius of kilometers away.
Finally, it is important to remember that inside the
laboratory, where the experiments were carried out, it
is a controlled environment where the plants are in a
favorable environment for their well-being and devel-
opment. Stresses are applied at controlled intervals
so that we can know exactly where the stresses have
occurred. In the field, the plant undergoes constant
stresses, such as climate, soil, pests, which can lead to
the need for other related information, such as the du-
ration interval of each stress and weather conditions.
Improvements in this aspect can also contribute to in-
creased plant stress detection efficiency.
The work described in this paper was carried out
in a bench test. A second experiment, which data is
currently being compiled, was carried out in the field,
and, in fact, was subject to several practical problems,
which will be discussed in an upcoming paper. In-
frastructure implementation aspects (battery, energy
consumption, system autonomy, sensors, communi-
cation, robustness) are also addressed in another work
front of the group.
5 CONCLUSION AND FUTURE
WORK
Computing in Fog, thanks to the technological evo-
lution of recent years and the consequent variety of
devices, has the potential to promote the development
of applications in the most different sectors of soci-
ety. New uses of computing have thus emerged and,
particularly in the context of this work, applying tech-
niques that bring intelligence to processing.
In this work, the technical feasibility of using the
NVIDIA Jetson Nano edge device in an agricultural
spray application was studied. In the device, time
series classification algorithms were executed in the
field, and the initial results, in an experimental na-
ture, showed that this type of device can be success-
fully used for the specific purpose. Furthermore, the
experiment allowed the identification of limitations
of the proposed solution, highlighting aspects to be
observed and necessary improvements for the imple-
mentation of the solution in a real scenario. The issue
of data volume represented by a time series presents a
set of difficulties that must be addressed to enable the
successful implementation of the proposed scenario.
Given the nature of time series, the number of
samples can grow significantly due to the time period
and frequency with which data are collected, which
will imply time series of large volumes. This charac-
teristic must be considered in the analysis of applica-
tion costs, both with regard to storage and processing
of this information. Previous studies indicated that
there is no loss in classification quality in the studied
algorithms with reduced representations, however, the
processing time to obtain these triples for representing
periods of the time series is quite expressive. Also
considering the volume of data, whose communica-
tion times are quite high, there is a clear indication
that an alternative should be sought for this task.
Future works aim to enable the proposed preci-
sion agriculture scenario. Objectively, focusing on
the problem of data volume, alternative techniques are
being studied for the compression of time series al-
ready in the device coupled to the sensor, minimizing
the storage, communication and processing require-
ments in the device responsible for the classification.
This activity also involves determining which alterna-
tive time series compression techniques provide suit-
able results for classification. Furthermore, an inves-
tigation about hyper parameter tuning in classification
algorithms is also desired, in order to improve the per-
formance for this task. Regarding communication, is-
sues related to range and security (prevention of mali-
cious access to the network) are being considered, as
well as considering data collection by sensors of other
natures, such as unmanned aerial vehicles.
An Application with Jetson Nano for Plant Stress Detection and On-field Spray Decision
221

ACKNOWLEDGEMENTS
This study was financed in part by the Coordenac¸
˜
ao
de Aperfeic¸oamento de Pessoal de N
´
ıvel Superior -
Brasil (CAPES) - Finance Code 001.
REFERENCES
Abadi, M. et al. (2015). TensorFlow: Large-scale machine
learning on heterogeneous systems. Software avail-
able from tensorflow.org.
Abdullah, A., Al Enazi, S., and Damaj, I. (2016). Agrisys:
A smart and ubiquitous controlled-environment agri-
culture system. In 2016 3rd MEC International Con-
ference on Big Data and Smart City (ICBDSC), pages
1–6. IEEE.
Alliance, L. (2015). What is LoRaWAN - A
technical overview of Lora and LoRaWAN.
https://lora-alliance.org/resource\textunderscorehub/
what-is-lorawan/. Acessed in 25/07/2021.
Baller, S. P., Jindal, A., Chadha, M., and Gerndt, M.
(2021). DeepEdgeBench: Benchmarking deep neural
networks on edge devices. CoRR, abs/2108.09457.
Bonomi, F., Milito, R., Zhu, J., and Addepalli, S. (2012).
Fog computing and its role in the internet of things. In
Proceedings of the First Edition of the MCC Workshop
on Mobile Cloud Computing, MCC ’12, pages 13–16,
New York, NY, USA. ACM.
Byers, C. C. (2017). Architectural imperatives for fog
computing: Use cases, requirements, and architectural
techniques for fog-enabled iot networks. IEEE Com-
munications Magazine, 55(8):14–20.
Chollet, F. et al. (2015). Keras. https://github.com/fchollet/
keras.
de Toledo, G. R. A. (2019). Electrophysiological charac-
terization of beans (Phaseolus vulgaris L.) cv. BRS-
Expedit under different water availabilities (In Por-
tuguese). PhD thesis, UFPel, Pelotas.
Gia, T. N., Qingqing, L., Queralta, J. P., Zou, Z., Tenhunen,
H., and Westerlund, T. (2019). Edge AI in smart farm-
ing IoT: CNNs at the edge and fog computing with
LoRa. IEEE AFRICON-2019.
Imran, H. A., Mujahid, U., Wazir, S., Latif, U., and
Mehmood, K. (2020). Embedded development boards
for Edge-AI: A comprehensive report.
Kamilaris, A., Gao, F., Prenafeta-Boldu, F. X., and Ali,
M. I. (2016). Agri-IoT: A semantic framework for
internet of things-enabled smart farming applications.
In 2016 IEEE 3rd World Forum on Internet of Things
(WF-IoT), pages 442–447. IEEE.
Kamilaris, A. and Prenafeta-Bold
´
u, F. X. (2018). Deep
learning in agriculture: A survey. Computers and elec-
tronics in agriculture, 147:70–90.
Kawai, T. and Mineno, H. (2020). Evaluation environment
using edge computing for artificial intelligence-based
irrigation system. In 2020 16th International Con-
ference on Mobility, Sensing and Networking (MSN),
pages 214–219.
Li, H., Ota, K., and Dong, M. (2018). Learning iot in
edge: Deep learning for the internet of things with
edge computing. IEEE Network, 32(1):96–101.
Liakos, K. G., Busato, P., Moshou, D., Pearson, S., and
Bochtis, D. (2018). Machine learning in agriculture:
A review. Sensors, 18(8):2674.
Maffei, M. and Bossi, S. (2006). Electrophysiology and
plant responses to biotic stress. In Plant Electrophys-
iology, pages 461–481. Springer.
Misra, N. N., Dixit, Y., Al-Mallahi, A., Bhullar, M. S.,
Upadhyay, R., and Martynenko, A. (2020). IoT, big
data and artificial intelligence in agriculture and food
industry. IEEE Internet of Things Journal, pages 1–1.
Nvidia, C. (2021). Jetson Nano. https://www.nvidia.com/
jetson-nano. Acessed in 16/07/2021.
Oliveira Jr, M. A. d., Sedrez, G., Monteiro, A., Puntel, F. E.,
and Cavalheiro, G. G. H. (2021). Effects of agro-
sensor time series approximation on plant stress de-
tection: An experimental study. In 2021 XIII Brazilian
Congress on Agroinformatics (SBIAGRO).
Pandas Development Team, T. (2020). pandas-dev/pandas:
Pandas.
Pedregosa, F., Varoquaux, G., Gramfort, A., Michel, V.,
Thirion, B., Grisel, O., Blondel, M., Prettenhofer,
P., Weiss, R., Dubourg, V., Vanderplas, J., Passos,
A., Cournapeau, D., Brucher, M., Perrot, M., and
Duchesnay, E. (2011). Scikit-learn: Machine learning
in Python. Journal of Machine Learning Research,
12:2825–2830.
Pereira, D. R., Papa, J. P., Saraiva, G. F. R., and Souza,
G. M. (2018). Automatic classification of plant elec-
trophysiological responses to environmental stimuli
using machine learning and interval arithmetic. Com-
puters and Electronics in Agriculture, 145:35–42.
Proietti, M., Bianchi, F., Marini, A., Menculini, L., Termite,
L., Garinei, A., Biondi, L., and Marconi, M. (2021).
Edge intelligence with deep learning in greenhouse
management. In Proceedings of the 10th International
Conference on Smart Cities and Green ICT Systems
- Volume 1: SMARTGREENS,, pages 180–187. IN-
STICC, SciTePress.
Saraf, S. B. and Gawali, D. H. (2017). IoT based smart ir-
rigation monitoring and controlling system. In 2017
2nd IEEE International Conference on Recent Trends
in Electronics, Information & Communication Tech-
nology (RTEICT), pages 815–819. IEEE.
Shi, W., Cao, J., Zhang, Q., Li, Y., and Xu, L. (2016). Edge
computing: Vision and challenges. IEEE Internet of
Things Journal, 3(5):637–646.
Zhou, G.-X., Li, P.-q., and Zhou, X.-d. (2011). Global cli-
mate warming on climate and agriculture in western
liaoning impact. In 2011 International Conference on
Remote Sensing, Environment and Transportation En-
gineering, pages 2200–2203.
SENSORNETS 2022 - 11th International Conference on Sensor Networks
222
