
Evolving Gaussian Mixture Models for Classification
Simon Reichhuber
a
and Sven Tomforde
b
Intelligente Systeme, Christian-Albrechts-Universit
¨
at zu Kiel, Kiel, Germany
Keywords:
Gaussian Mixture Models, Evolutionary Algorithms, Classification, Human Activity Recognition.
Abstract:
The combination of Gaussian Mixture Models and the Expectation Maximisation algorithm is a powerful tool
for clustering tasks. Although there are extensions for the classification task, the success of the approaches is
limited, in part because of instabilities in the initialisation method, as it requires a large number of statistical
tests. To circumvent this, we propose an ’evolutionary Gaussian Mixture Model’ for classification, where a
statistical sample of models evolves to a stable solution. Experiments in the domain of Human Activity Recog-
nition are conducted to demonstrate the sensibility of the proposed technique and compare the performance to
SVM-based or LSTM-based approaches.
1 INTRODUCTION
In intelligent technical systems, e.g. referring to
concepts from the Autonomic (Kephart and Chess,
2003) or Organic Computing (M
¨
uller-Schloer and
Tomforde, 2017) domains, decisions about appropri-
ate behaviour are typically taken based on a model
of the current perceptions. In many cases, this re-
quires continuous processing and classification of
multi-dimensional sensor data. A large variety of
techniques can be found in literature that is applica-
ble to this task (D’Angelo et al., 2019) – but only a
few techniques can provide an estimate of the associ-
ated uncertainty in addition to the classification deci-
sion. Classifiers based on Gaussian Mixture Models
(GMM) (Heck and Chou, 1994) have been shown to
come with a set of advantages including an inherent
estimate if uncertainty and a probability distribution
for the corresponding classes.
Consider human activity recognition (HAR)
(Kong and Fu, 2018) as an example for a classifica-
tion task in intelligent systems. Here, the behaviour
of a human user is perceived by sensors, e.g. in terms
of gyroscope, accelerometer or magnetometer avail-
able on a smartphone. The incoming data stream of
the different sensors is pre-processed online, possi-
bly segmented into smaller parts, and classified. The
classification can consider basic activities such as sit-
ting, walking, or running – but also more sophisti-
cated activities such as cycling or playing football.
a
https://orcid.org/0000-0001-8951-8962
b
https://orcid.org/0000-0002-5825-8915
Technically, these known activities are represented by
expected patterns and compared to the currently ob-
served patterns.
A standard approach for applying GMMs (or bet-
ter CMM: classifiers based on GMM) to HAR is
to run the Expectation Maximisation algorithm on
large sets of training data. In this paper, we pro-
pose an alternative approach: We aim at evolving the
CMM/GMM using evolutionary operators. Hence,
the contribution of the paper is twofold: It defines the
underlying evolutionary including the operators and
presents a detailed study on GMM-based HAR data
sets.
The remainder of this paper is organised as fol-
lows: Section 2 briefly reviews the related literature of
GMMs, classification, and Evolutionary Algorithms.
Next, we give a short recap of the used algorithms
(Section 3) which also leads to the used reference
baseline approach (Section 3.4). Then, in Section 4,
we present our methodology of evolving GMMs for
classification. Subsequently, we explain the experi-
mental setup and present its results in Section 5. Fi-
nally, we give a short outlook to our further research
(Section 6) and summarise our findings in Section 7.
2 RELATED WORK
Gaussian Mixture Models (GMMs) has been fre-
quently used in the literature for the sake of a small-
dimensional representation. For example, in the
case of GMM-based adaptive knot placement for B-
964
Reichhuber, S. and Tomforde, S.
Evolving Gaussian Mixture Models for Classification.
DOI: 10.5220/0010984900003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 3, pages 964-974
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Splines (Zhao et al., 2011), projection pursuit with
GMMs (Scrucca and Serafini, 2019), or as features
for Support Vector Machines (in this context, the
representation is also called “Universal Background
Model” (You et al., 2010a)). Another field that
uses the benefits of GMMs is the Organic Comput-
ing (OC) domain. The robustness against sensor
noise and the advantage to analyse the knowledge
represented by a GMM are two important charac-
teristics making it attractive for constructors of such
self-adapative and self-aware systems (J
¨
anicke et al.,
2016; M
¨
uller-Schloer and Tomforde, 2017). Some
OC properties are guaranteed (with OC properties be-
ing a superset of self-* properties as originally defined
for Autonomic Computing in (Kephart and Chess,
2003)), for instance adding new sensors to observa-
tion space (self-improving) and replacing defect ones
(self-healing). In decision-making problems, GMMs
are used for the detection of optimal actions which
was formulated as a classification problem (M
¨
uller-
Schloer and Tomforde, 2017). These GMM-based
classifiers are denoted as CMMs and have been used
in several applications throughout the last decades,
such as speaker identification (del Alamo et al., 1996;
Ozerov et al., 2011; Qi and Wang, 2011), language
recognition (You et al., 2010b), Arabic sign language
recognition (Deriche et al., 2019), face video verifi-
cation (Li and Narayanan, 2011), limb motion classi-
fication using continuous myoelectric signals (Huang
et al., 2005), or classification of sequences observed
in electrocardiogram streams (Martis et al., 2009).
Due to the inherent robustness against noise and ex-
plicit modelling of the underlying uncertainties in
classification tasks, GMMs have been shown to be a
powerful tool for human activity recognition (HAR)
(J
¨
anicke et al., 2016). In typical examples, the prin-
ciples of using accelerometer data from smartphones
(with a sampling rate of about 20 Hz to 40 Hz) for mo-
tion detection was shown in (Lau and David, 2010)
and recently has been refined in (Garcia-Gonzalez
et al., 2020). Thus, we rely on HAR as a use case
in this article.
3 FOUNDATIONS OF GAUSSIAN
MIXTURE MODELS AND
EVOLUTIONARY
ALGORITHMS
This section briefly summarises the technical basis of
our contribution. It, therefore, introduces the concept
of GMMs and explains how they can be turned into
classifiers.
3.1 GMM
A Gaussian Mixture Model (GMM) is the superpo-
sition of multiple (here J) Gaussians called compo-
nents (cf. Eq. (1)). Each component j has its own
set of parameters: the mean vector µ
µ
µ
j
which de-
scribes its location and a covariance matrix Σ
Σ
Σ
j
that
describes its shape. To ensure that the GMM rep-
resents a valid density (i.e.,
R
P(x)dx = 1) so-called
mixture coefficients π
j
are introduced for each com-
ponent (cf. Eq. (2) and Eq. (3) for given constraints).
P(x
x
x) =
J
∑
j=1
π
j
· N (x
x
x|µ
µ
µ
j
,Σ
Σ
Σ
j
) (1)
0 ≤π
j
≤ 1 (2)
1 =
J
∑
j=1
π
j
(3)
γ
γ
γ
x
x
x
0
, j
=
π
j
N (x
x
x
0
|µ
µ
µ
j
,Σ
Σ
Σ
j
)
P(x
x
x
0
)
(4)
The probabilities γ
γ
γ
x
x
x
0
, j
(cf. Eq. (4)) are called respon-
sibilities and indicate to what degree a given sample
x
x
x
0
belongs to a component j.
The parameters for a GMM can be fitted using
standard Expectation-Maximisation (EM), or varia-
tional inference (Bishop, 2006) on a suitable train-
ing set X
X
X
train
. An implementation for variational
Bayesian inference for GMM can be found, e.g., in
(Gruhl et al., 2021). Belonging to the class of gen-
erative probabilistic models, a GMM can be used to
sample from it. That is, to generate distinct data sets
that have the same statistical properties as the used
training data. The sampling process is twofold. The
first step is to draw
ˆ
j from a categorical distribution
(also called multinoulli) described by the mixture co-
efficients π
j
(cf. Eq. (5)). In the second step,
ˆ
j indi-
cates from which of the Gaussian components a sam-
ple is drawn (cf. Eq. (6)). By repeating this procedure
we can sample a whole data set X
X
X
∗
with the same sta-
tistical properties as the training set X
X
X
train
.
ˆ
j ' Cat(π
1
,...,π
J
) (5)
x
x
x
∗
' N (µ
µ
µ
ˆ
j
,Σ
Σ
Σ
ˆ
j
) (6)
3.2 CMM
Although GMMs are popular for clustering (McLach-
lan and Rathnayake, 2014; Chen et al., 2020), they
have also been extended for classification. For exam-
ple, in (M
¨
uller-Schloer and Tomforde, 2017), classi-
fier based on Gaussian Mixture Models are denoted
as CMMs.
Evolving Gaussian Mixture Models for Classification
965

Similar as in (M
¨
uller-Schloer and Tomforde,
2017), we define the classification model with
GMMs, starting with the class conclusions p(c| j), for
each component j:
p(c| j) = ξ
j,c
=
1
N
j
∑
x∈X
c
γ
x
x
x, j
, (7)
Where X
c
are the samples in X assigned with label
c and N
j
=
∑
N
i=1
γ
x
x
x
i
, j
is the sum of the responsibilities
of component j.
Then, the class posterior is given by:
p(c|x
x
x) =
J
∑
j=1
p(c| j) · p( j|x
x
x) =
J
∑
j=1
ξ
j,c
· γ
x
x
x, j
, (8)
Finally, the discrimination function is constructed
by calculating the a-posterior of the class probabili-
ties:
h(x
x
x
0
) = arg max
c
p(c|x
x
x
0
(9)
The final classification procedure using CMMs
consist of four steps:
(1) Initialisation
(2) K-Means refinement
(3) EM-Updates
(4) Evaluation
The first step, (1) Initialisation, shall provide initial
values for the means µ
µ
µ
j
and the covariance matrix Σ
Σ
Σ
j
of each component j in the CMM. This can either be
randomly done (cf. Reference baseline in Section 3.4)
or with an advanced procedure (cf. Evolved CMMS
in Section 4). To guarantee that Σ
Σ
Σ
j
is positive definite,
we can use the steps in Eq. (10), Eq.(11), and Eq.(12)
to generate random positive definite matrices:
M := (m
i, j
)
1≤i, j≤n
where m
i, j
∼ U
[−1,1]
(10)
M ← 0.5 · (M + M
T
) (11)
M ← M + n · 11
n
(12)
Subsequently, it is reasonable to stabilise the
means and distribute them according to the density
of the input space by applying a K-Means procedure
resulting in step (2) K-Means refinement. Since K-
Means does not refer to labels, some more complex
classes are modelled by more components than other
classes. Afterwards, we apply EM-updates in step
(3) EM-Updates until a predefined stop criterion is
reached. The latter can either be a total number of
iterations, or a certain threshold denoting the change
in the likelihood of drawing X from the current CMM
to the one of the last EM-Update ∆P(X |π
π
π,µ
µ
µ,Σ
Σ
Σ). In
the end, we evaluate in step (4) Evaluation the dif-
ferences between the CMM model predictions of an
unseen test set ˆy
test
and the provided labels of this test
set y
test
. Finally, the measured classification error is
defined as our classification performance.
3.3 Evolutionary Algorithms
Evolutionary Algorithms (EAs) are a powerful tool
for multi-dimensional minimisation/maximisation
problems. Given an input space X and a multi-
dimensional function f : X
d
− > R the goal is to
find an input x
∗
maximising the function f , i.e.
x
∗
= argmax
x∈X
f (x). One of the pioneers of the
idea of evolving some randomly found solutions
by means of evolutionary operators (i.e. selection,
recombination, and mutation) was John H. Holland
who defined one of the first Genetic Algorithms in
the year 1975(Holland, 1975). Given a set of N
P
uniformly-distributed individuals, denoted as popula-
tion P , as seen in Algorithm 1 in each iteration the
individuals’ fitness is calculated (CalculateFitness()),
based on the fitness value, the most powerful indi-
viduals are selected (Selection()) for a recombination
procedure (Recombination()). In the end, random
mutation is applied to all of the novel individuals
Mutation() which form the next generation. Hence,
these iterations are also called generations g. The
algorithm terminates either after a previously-defined
maximum number of generations g < G, or the
best-found fitness value is above a certain threshold
τ ∈ R .
Algorithm 1: The canonical GA algorithm.
1: function GA(X, f )
2: P
(0)
← Initialisation()
3: g ← 0
4: while bestFitness(P
(g)
) < τ AND g < G do
5: Fitness ← CalculateFitness( f , P
(g)
)
6: Parents ← Selection(P
(g)
)
7: Offspring ← Recombination(Parents)
8: P
(g+1)
← Mutation(Offspring)
9: g ← g + 1
10: end while
11: return x
∗
, f (x
∗
), g
12: end function
3.4 Reference Baseline
As a reference baseline, we initialise a population
of CMMs by means of uniform-randomly distributed
configurations of the parameters: responsibilities
γ
x
x
x
0
, j
, means µ
µ
µ
j
, and covariance matrices Σ
Σ
Σ
j
The com-
mon way to find the most suitable CMM represen-
tation with f (X|Ω) ∼ Y is to uniformly initiate the
model parameters multiple times, and find the centres
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
966
of classes via K-Means iterations. Afterwards, the
EM-Algorithm is applied and the best initialisation in
terms of classification error is kept. Given the number
of generations G and the population size N
P
, the evo-
lution of CMMs requires GN
P
evaluations. With the
same number resulting in similar computing time, one
can compare the evolutionary setting with the random
initialisation and subsequent K-Means.
4 METHODOLOGY
4.1 Evolution of CMMs
By the term ”Evolved Machine Learning” we mean
the maximisation of the performance of a machine
learning model through evolutionary algorithms. In
this process, a population is created that consists of
machine learning models with randomly selected hy-
perparameter configurations.
max
θ∈Θ
π(θ) (13)
Encoding
In the case of CMMs we define individual i of the
population as:
θ
[i]
=
π
π
π
[i]
,µ
µ
µ
[i]
,Σ
Σ
Σ
[i]
(14)
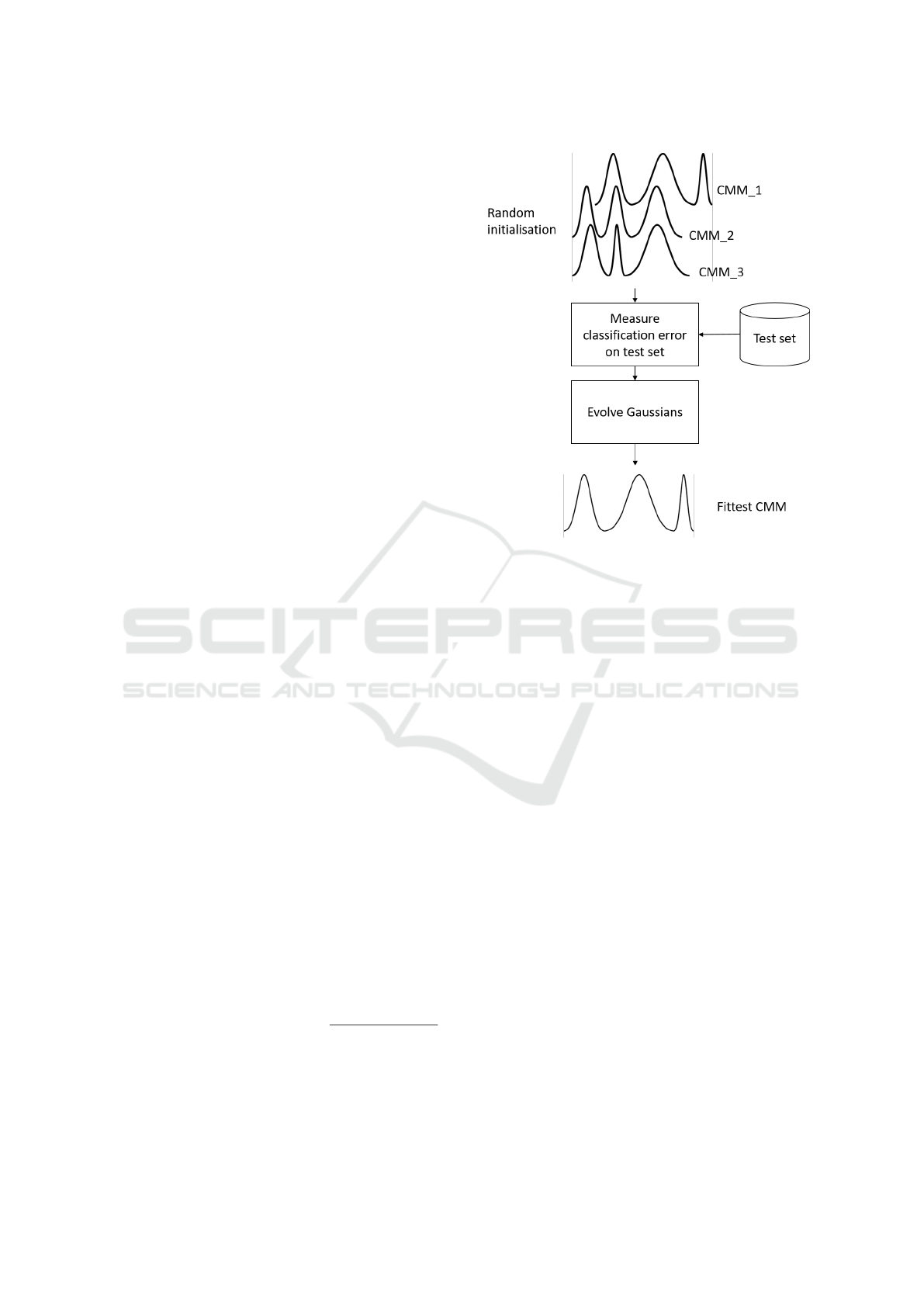
Fitness Function
Furthermore, the fitness function is given by the clas-
sification performance that we are interested in. That
means, for each fitness call we have to follow the
whole classification procedure as we defined in Sec-
tion 3.2. Based on this fitness value, we are able to ap-
ply Evolutionary Algorithms and filter out the fittest
individual after a maximum number of N
G
genera-
tions has been evolved (cf. Figure 1. Since we are
dealing with highly unbalanced datasets with |{y ∈
Y |y = c
i
}| << |{y ∈ Y |y = c
j
}| for some classes
c
i
,c
j
∈ C , we decided to mostly concern the balanced
accuracy in our experiments. Given a set of true labels
Y := {y}
N
i=1
and model prediction
ˆ
Y = { f (x
i
)}
N
i=1
=
{ ˆy
i
}
N
i=1
, the balanced accuracy weights each accuracy
is defined as in (Velez et al., 2007) (cf. Eq. 15).
balanced-accuracy(Y ,
ˆ
Y ) =
N
∑
i=1
χ
{y
i
}
( ˆy
i
)
|{y
0
∈ Y |y
0
= y
i
}|
,
(15)
where χ
S
(ω) =
1 if ω ∈ S
0 if ω /∈ S
(16)
Figure 1: Schema of the procedure for evolving CMMs.
Selection
The parent population is found with respect to the fit-
ness values of the individuals. The na
¨
ıve selection
strategy that takes the top k individuals into account
leads to a poor diversity of the next generations. The
latter is solved by stochastic selection strategies. For
our approach, we used the selection strategy remain-
der stochastic sampling (Holland, 1975; Goldberg
et al., 1990; Blanco et al., 2001) based on the relative
fitness. Remainder stochastic sampling combines the
strength of stochastic selection were even the weak-
est individual has a chance to be selected, similarly as
stochastic universal sampling, with a guaranteed se-
lection of individuals with a relative fitness above the
average relative fitness which limits the diversity but
stabilises the best solutions found so far.
Recombination
From the selection, there will be drawn two parents
x
x
x
p
1
and x
x
x
p
2
for pairing which results in two novel chil-
dren x
x
x
c
1
and x
x
x
c
2
. Since GMMs are probabilistic gen-
erative models, the simplest way to generate a new
child from two GMM parents would be to linearly
combine both parents and draw a new GMM from
the linear combination, which is also a GMM. Here
In order to keep track of the class imbalance also dur-
ing recombination. The ratio of the components per
class should remain. Therefore, we first identify the
Evolving Gaussian Mixture Models for Classification
967

components of a parent that is most likely generating
class c. Given a class c ∈ C , the class components of
parent p are defined as:
ι
p
1
(c) := { j ∈ N(J)| argmax
j
0
∈N(J)
p(c
i
| j
0
) = j} (17)
Using the class components in Eq. 17, Parent 1 in-
duces her knowledge about the class complexity of
class c which can be estimated from the magnitude
of the class components |ι
p
1
(c)| to child 1, and par-
ent 2 analogous to child 2. This number is used
to determine the number of draws from the com-
bined component indices of parent 1 and parent 2,
i.e. ι
p
1
(c) ∪ ι
p
2
(c), representing the knowledge about
class c. Since
∑
c
|ι
p
1
(c)| = J, an iteration over
all classes sufficiently defines two new J-component
CMM children.
Mutation
Since each of the three CMM parameters π
π
π
[i]
, µ
µ
µ
[i]
,
and Σ
Σ
Σ
[i]
have different effects on the CMM, the
mutation should also be divided into three types.
Hence, there is the need for three mutation proba-
bilities: (1) a mixture-coefficient mutation probabil-
ity p
π
π
π
, (2) a mean-mutation probability p
µ
µ
µ
, and (3)
a correlation-matrix mutation probability p
Σ
Σ
Σ
. For the
mean-mutation, we simply implemented a uniformly
drawn one-step mutation. Because only a single di-
mension in a mean vector of the component of a
CMM is altered, the probability p
µ
µ
µ
has to be ade-
quately small. The correlation-matrix mutation is ap-
plied by replacing a randomly selected row or column
with index i of the correlation matrix with a randomly
drawn row or column with values in [−1,1] where
to the i-th entry is added the number J. The addi-
tion keeps the positive definiteness. Once an individ-
ual was chosen for mixture coefficient mutation, we
apply a pairwise mixture coefficient exchange of the
components i and j of an individual as in Eq. 18
s ← U[−s,s] , where s :=
1
J
(18)
π
i
← s (19)
π
j
← −s (20)
Elitism
Only, a small amount of the best individuals in the
population, denoted as elites, are immune to the mu-
tation operation and are added directly to the next
generation. Therefore, the parameter r
elite
defines the
fraction of elites in the population.
Algorithm 2: Evolved-CMMs as a combination of an EA
and CMMs. The negative loss function −L is set to the
balanced accuracy.
1: function EVOLVED-CMMS(X
X
X
train
, y
y
y
train
, X
X
X
test
,
y
y
y
test
)
2: X
X
X
train
← Z-norm(X
X
X
train
,µ
train
,σ
train
)
3: X
X
X
test
← Z-norm(X
X
X
test
,µ
train
,σ
train
)
4: Initialise population of CMMs P
(0)
5: while g < G do
6: for each i ∈ N(N
P
) do
7: CMM
i
[fitness] ←
−L(y
y
y
test
,CMM
i
(X
X
X
test
))
8: end for
9: Parents ←
RemainderStochasticalSampling
({CMM
i
}
N
P
i=1
10: Offspring ←
Recombination(Parents)
11: NextGeneration ←
Mutation(Parents ∪ Offspring) ∪ Elite
12: g ← g + 1
13: P
(g)
← NextGeneration
14: end while
15: CMM
∗
←
argmax
CMM∈CMM
(g)
−L(y
y
y
test
,CMM
i
(X
X
X
test
))
16: score ← −L(y
y
y
test
,CMM
∗
i
(X
X
X
test
))
17: return CMM
∗
,score
18: end function
4.2 Evolving Time-consuming Machine
Learning Models
One question is how to reduce the huge amount of
floating-point operations (FLOPs). Besides the in-
dividuals that are marked as elitists, there is also a
percentage of selected parents that are included un-
touched in the next generation. Since their model pa-
rameters already have been evaluated once, it makes
sense to keep track of unchanged individuals and pre-
vent a time-consuming re-computation of the fitness.
Another runtime optimisation can be found in paral-
lelisation of the individuals of one generation within
the GPU as explained in (Chen et al., 2020).
5 EXPERIMENTS
In this section, we explain the conducted experi-
ments in the domain of HAR. The dataset was taken
from the contribution of Garcia-Gonzalez et. al
(Garcia-Gonzalez et al., 2020) and contains sensor
records from 19 smartphone-users who wear their
smart phone in daily-life and annotated their state of
activity by giving labels, i.e. inactive, active, walking,
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
968
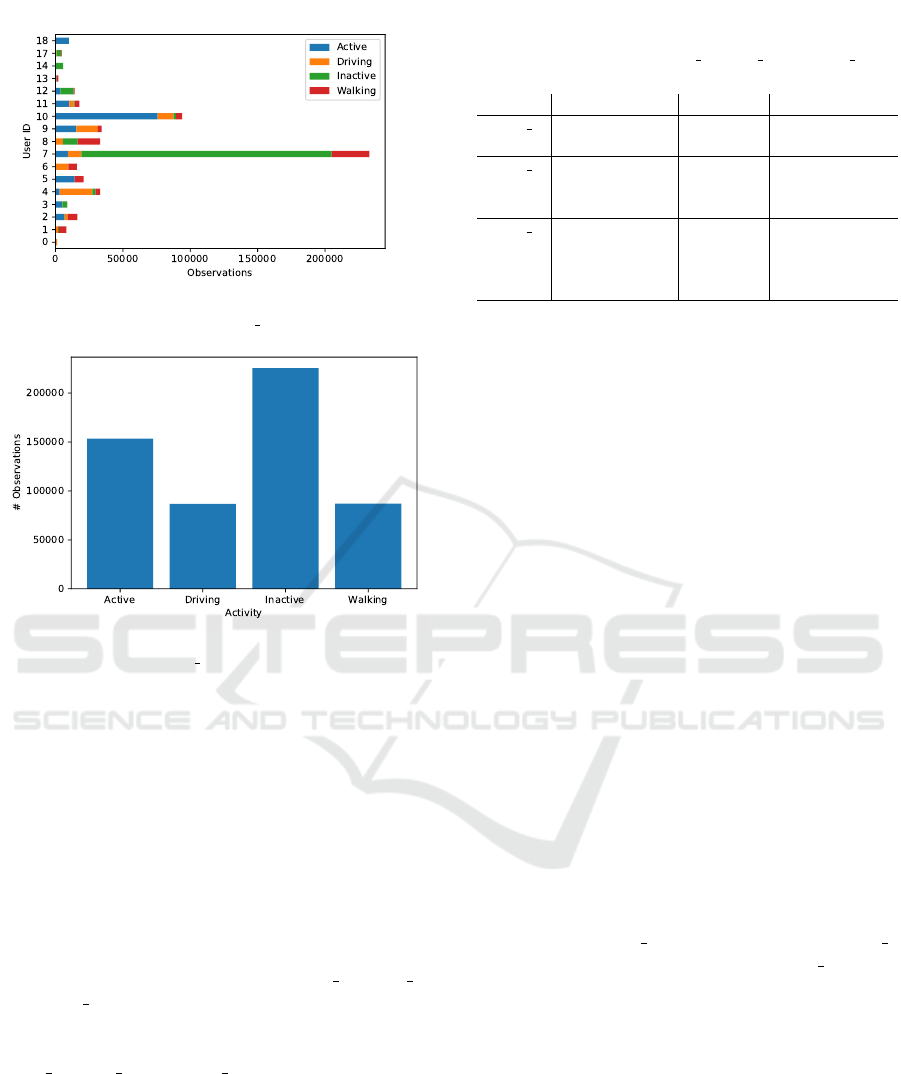
Figure 2: Total number of samples provided for each activ-
ity of each user in the dataset HAR 1.
Figure 3: Total number of samples provided for each of the
classes in the dataset HAR 1.
and driving. They sampled the streams with a sliding
window approach into 20 sec-chunks with an overlap
of 19 sec. In Figure 2, the distribution of the samples
per user is visualised.
Another characteristic of this dataset is the class
imbalance, which can be seen in Figure 3. These im-
balance should be taken into account by the classi-
fication and underlines the necessity of the balanced
accuracy, i.e. a na
¨
ıve classifier always predicting the
activity inactive would reach a accuracy of 43 %.
For the analysis of the optimal sensors, the au-
thors provided three different sets based on differ-
ent sensors, which we abbreviate HAR 1, HAR 2,
and HAR 3 in the remainder. The detailed sensor
equipment of each dataset can be seen in Table 1.
The differencies in the number of samples between
HAR 1, HAR 2, and HAR 3 is due to different user
equipment. The claimed objective of the authors of
(Garcia-Gonzalez et al., 2020) is to provide a dataset
from which machine learning algorithms can create a
orientation-independent, placement-independent, and
subject-independent predictor for the activity. Even if
further experiments are needed to affirm the claim for
more than the included 19 subjects, more placements,
and more orientations (which were not been defined,
Table 1: Sensor equipment, support, and involved users of
each of the three datasets HAR 1, HAR 2, and HAR 3 pro-
vided by (Garcia-Gonzalez et al., 2020).
Name Used sensors #samples User IDs
HAR 1 Accelerometer
GPS
182387 All users
(ID 0 to ID 18)
HAR 2 Accelerometer
Magnetometer
GPS
177246 Missing IDs:
14, 15, 16, 18
HAR 3 Accelerometer
Gyroscope
Magnetometer
GPS
164762 Missing Ids:
4, 14-18
hence, determined by the individual behaviour of the
users), the large variety of these attributes induces a
high noise in the dataset. In contrast to this noise
which is not well understood, for the reduction of the
pure sensor noise, there are simple methods available
in machine learning. For this reason, the author pro-
vide a preprocessing with low-pass filter and suggest
to extract the following statistical features for each
sensor:
• Mean
• Minimum
• Maximum
• Variance
• Mean absolute deviation
• Interquartile range
Counting the number of extracted values per sensor
per timestamp, there are three for the accelerometer,
three for the gyroscope, and three for the magnetome-
ter. Additionally, for the GPS, there can be extracted
six values: latitude, longitude, altitude, speed, bear-
ing, and accuracy.
Given three values measured by the accelerome-
ter, six values extracted from the GPS, and for each
six statistical features, it sums up to 6 · (3 + 6) = 54
features for the HAR 1 dataset, analogous for HAR 2
6 · (3 + 3 + 6) = 72 features, and for HAR 3 6 · (3 +
3 + 3 + 6) = 90 features. Using these features, the fit-
ness function requires a training phase of a CMM on
67 % of the dataset with the following parameters in
Table 2 and a test phase calculating the balanced ac-
curacy on 33 % of the dataset. Before the training or
testing, the samples were z-normalised based on vari-
ance and mean found in the training set.
With this CMM setting, we initialised the evolu-
tionary algorithm with the parameters in Table 3. Be-
cause of the limtited computing time, the parameters
were manually optimised. Further improvements in
the efficiency of the algorithm may allow a compre-
hensive hyperparameter tuning.
Evolving Gaussian Mixture Models for Classification
969
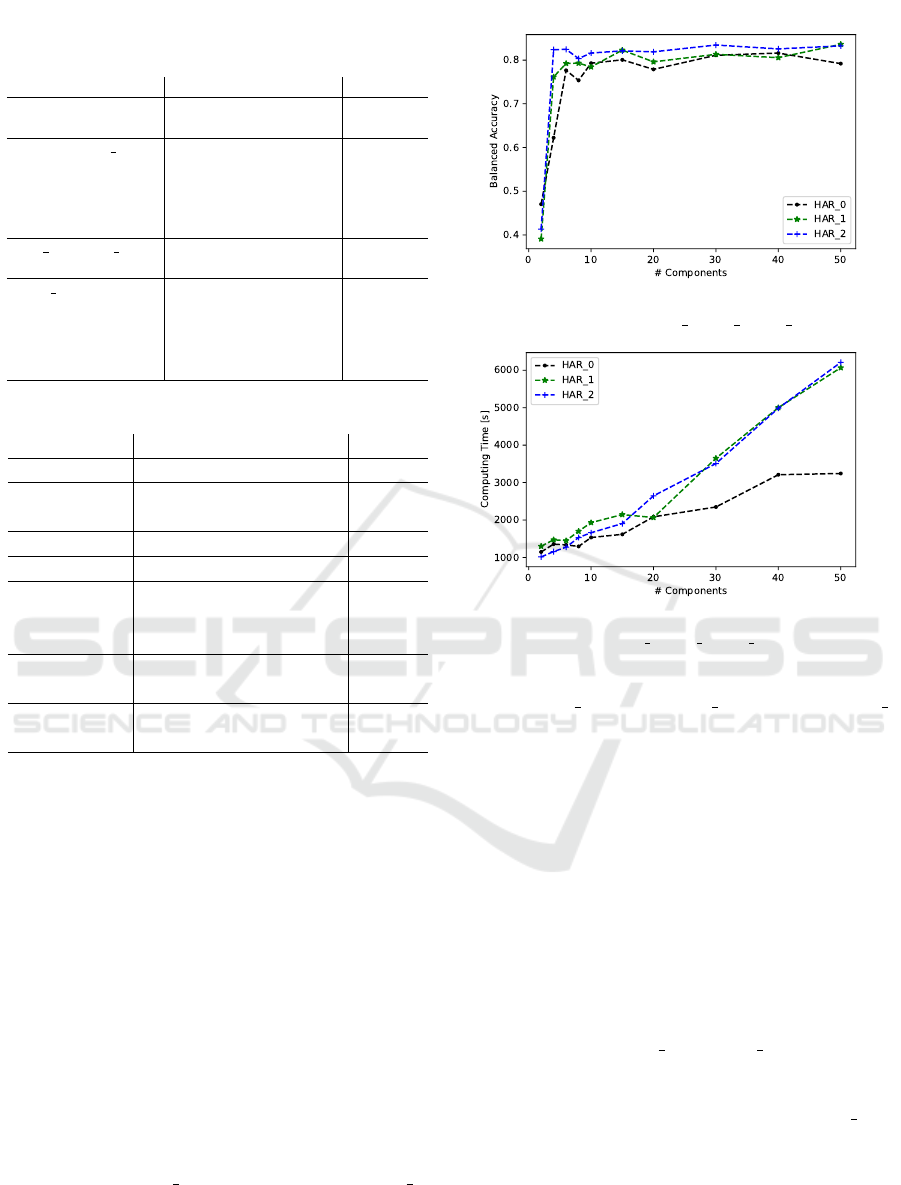
Table 2: Parameters used for training CMMs without evo-
lutionary adaptation.
Parameter Description Value
J Number of Gaussian
components
30
covariance type Characteristics of the
positive definite co-
variance matrix (e.g.
full, diagonal, con-
stant)
full
em updates max Maximum number of
EM updates
100
em tolerance Stop criterion for EM
updates if the change
of the likelihood
∆P(X|π
π
π,µ
µ
µ,Σ
Σ
Σ) is
below this threshold
1 × 10
−3
Table 3: Parameters used for the evolutionary algorithm.
Parameter Description Value
N
P
Population size 100
N
G
Number of genera-
tions
100
r
p
Parents ratio 50 %
r
e
Elites ratio 1 %
p
π
π
π
Mutation proba-
bility for mixture-
coefficient
1 %
p
µ
µ
µ
Mutation probability
for means
1 %
p
Σ
Σ
Σ
Mutation probability
for covariance matrix
1 %
Time Complexity versus Performance Trade-off
The setting of the parameters in Table 2 comes with
a trade-off decision between accuracy (cf. Figure 4)
and computing time (cf. Figure 5). Therefore, we
analysed the balanced accuracy of models of varying
complexity. The higher the number of components
in a single CMM, the larger is its model complexity.
As a drawback, this model has to be called for each
fitness call.
Therefore, a good trade-off between the perfor-
mance reaching a level of 81.108% balanced accuracy
and limiting the computing time to 2347 sec (for com-
parison, using 40 components the computing time in-
creases to 3209 sec) are 30 components. It is note-
worthy that also the number of features influences the
computing time and there is a break point between
54 features of HAR 1 and 72 features of HAR 2,
whereas the balanced accuracy is quit high for all
datasets.
In comparison to the authors of the dataset who
applied support vector machines for the classifica-
Figure 4: Balanced accuracy of evolved GCC trained on
each of the data sets, i.e. HAR 0, HAR 1, HAR 2.
Figure 5: Computing time of evolved GCC trained on each
of the data sets, i.e. HAR 0, HAR 1, HAR 2.
tion (Garcia-Gonzalez et al., 2020) with a mean accu-
racy of HAR 1 67.53 %, HAR 2 74.39 %, and HAR 3
69.28 %, the evolved CMMs predict up to a balanced
accuracy of 80.03 % (cf. Figure 4). The baseline
(see Section 4) eventually reached a maximum bal-
anced accuracy of 79.324 %. But on average it only
got 75.916 % with a standard deviation of 1.464 %.
With this, the baseline is in the near of the evolu-
tionary algorithm but the chances of having an ap-
propriate CMM initialisation are in general not suf-
ficient for a secure guarantee. In contrast to the ran-
dom initialisation, because of elitism in the evolving
CMMs, the fitness value history is monotonically in-
creasing. Therefore, in all of the runs, the evolved
CMMs reached a stable solution above 80 % balanced
accuracy as seen in Figure 6. We also assume that the
larger sensor sets HAR 2 and HAR 3 would increase
further with more generations and more computing
time. With respect to the computing time and the best
results, we would decide to use dataset HAR 1 for
HAR classification with Gaussians and statistical fea-
tures.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
970

Table 4: Classification results of evolved CMMs tested on
33 % of the samples in the datasets HAR 1, HAR 2, and
HAR 3.
precision recall f1-score support
Active 0.85 0.58 0.69 50741
Driving 0.87 0.83 0.85 28768
Inactive 0.79 0.93 0.86 74398
Walking 0.66 0.76 0.70 28480
accuracy 0.79 0.79 0.79 1.0
macro avg 0.79 0.78 0.78 182387
weighted avg 0.80 0.79 0.79 182387
(a) Classification results of evolved CMMs tested on 182k
samples of HAR dataset with features based on triaxial ac-
celerometer sensor and GPS.
precision recall f1-score support
Active 0.79 0.62 0.70 47107
Driving 0.73 0.92 0.81 28613
Inactive 0.80 0.95 0.87 72676
Walking 0.90 0.57 0.70 28850
accuracy 0.79 0.79 0.79 1.0
macro avg 0.80 0.77 0.77 177246
weighted avg 0.80 0.79 0.79 177246
(b) Classification results of evolved CMMs tested on 177k
samples of HAR dataset with features based on triaxial ac-
celerometer, triaxial gyroscope, and GPS.
precision recall f1-score support
Active 0.72 0.66 0.69 46386
Driving 0.91 0.75 0.82 20332
Inactive 0.81 0.91 0.85 70456
Walking 0.75 0.69 0.72 27588
accuracy 0.78 0.78 0.78 1.0
macro avg 0.79 0.75 0.77 164762
weighted avg 0.78 0.78 0.78 164762
(c) Classification results of evolved CMMs tested on 164k
samples of HAR dataset with features based on triaxial ac-
celerometer, triaxial gyroscope, GPS, and magnetometer.
6 FURTHER RESEARCH
The presented approach offers a potential interface
to adapt the evolution principles towards control of
diversity using, e.g., self-betting or external-betting
mechanisms as proposed in (Reichhuber and Tom-
forde, 2021). There are two options to enrich the
algorithm with betting capabilities. Either each in-
dividual is given the possibility to bet on itself (self-
betting Evolutionary Algorithm), or we introduce an-
other bet population which is evolved simultaneously
to the GCCs and its only objective is to learn how to
bet on the individuals of the current population.
(a) Best fitness value history of evolved CMMs tested
on 182k samples of HAR dataset with features based on
triaxial-accelerometer sensor and GPS.
(b) Best fitness value history of evolved CMMs tested on
177k samples of HAR dataset with features based on triaxial
accelerometer, triaxial gyroscope, and GPS.
(c) Best fitness value history of evolved CMMs tested on
164k samples of HAR dataset with features based on triaxial
accelerometer, triaxial gyroscope, GPS, and magnetometer.
Figure 6: Fitness value history over 100 generations of
evolving CMMs tested on the datasets HAR 1, HAR 2, and
HAR 3.
Evolving Gaussian Mixture Models for Classification
971
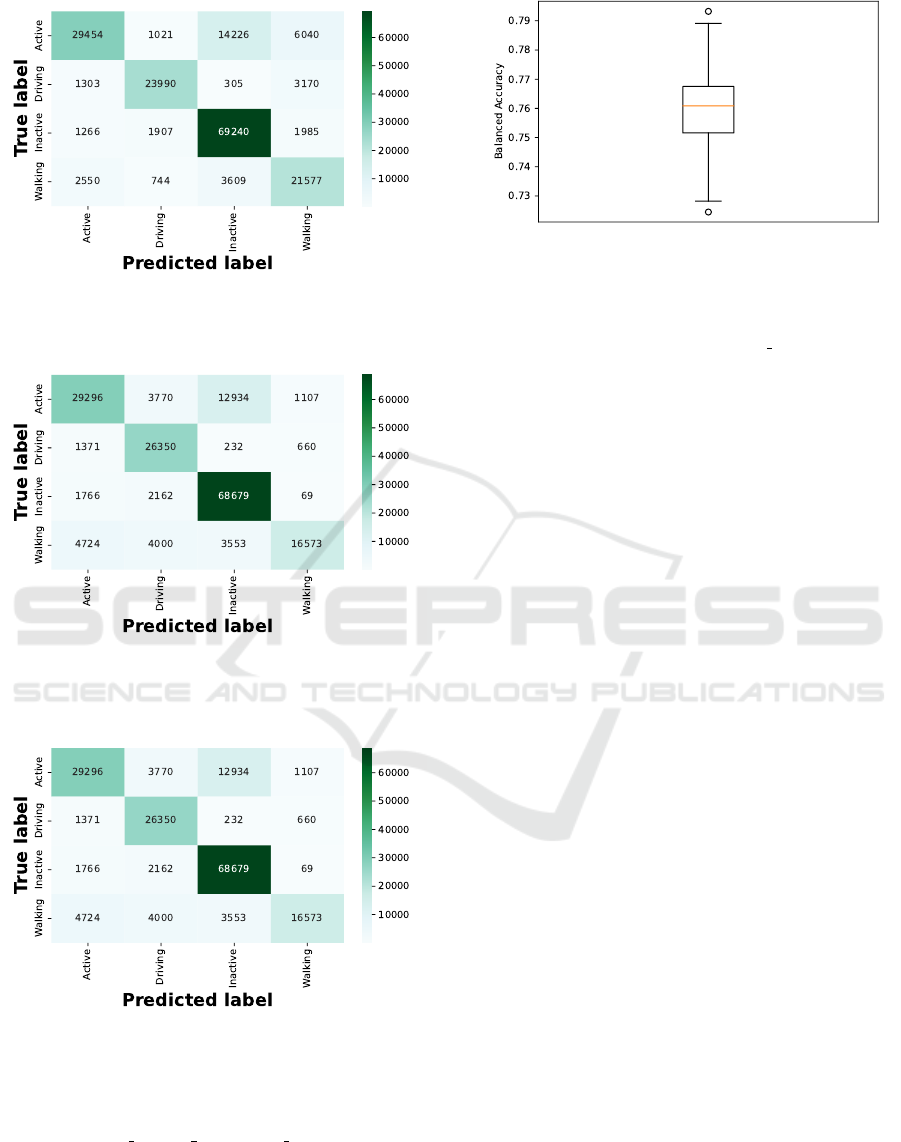
(a) Confusion matrix of evolved CMMs tested on 182k
samples of HAR dataset with features based on triaxial-
accelerometer sensor and GPS.
(b) Confusion matrix of evolved CMMs tested on 177k
samples of HAR dataset with features based on triaxial ac-
celerometer, triaxial gyroscope, and GPS.
(c) Confusion matrix of evolved CMMs tested on 164k sam-
ples of HAR dataset with features based on triaxial ac-
celerometer, triaxial gyroscope, GPS, and magnetometer.
Figure 7: Confusion matrices of evolving CMMs tested on
the datasets HAR 1, HAR 2, and HAR 3.
Figure 8: Boxplot diagram with the 25th and the 75th per-
centile of the balanced accuracy distribution found with the
baseline reference. In 100000 iterations the best-found ini-
tialisations of GCCs resulted in a maximum balanced accu-
racy of 79.324 % and a median (orange line) of 76.083 %.
The tests were driven on the data set HAR 0.
Since the latter would increase the time complex-
ity of the algorithm, a solution for reducing the time
complexity of evolving GCCs is required. Due to the
matrix inversion, the time complexity of training a
single CMM with n samples of dimensions d in k it-
erations of EM updates is O(nkd
3
). Since the latter is
required for each fitness update of the individuals in
a population, there are two more factors: (i) the num-
ber of generations g and (ii) the population size N that
needs to be considered. In total, the time complexity
for the evolved GCC algorithm is O(gN(nkd
3
)).
However, for the experiments, we were able to
limit the actual costs to an affordable amount of com-
puting time. That is, we limited the number of EM
iterations to a maximum of 100 and also used a min-
imum update delta of 1e − 3 as stop criterion, which
reduces the actual duration to a spendable amount of
computing time.
Regarding the high time complexity, a further im-
provement of the evolved CMM algorithm would be
a replacement of the EM updates with a low-cost ap-
proximation. Using fast Incremental Gaussian Mix-
ture Models, as presented in (Pinto and Engel, 2015),
and limiting the stream size s for each individual in
the population, the time complexity of the algorithm
can be reduced to O(gN(skd
2
)). However, the in-
creasing performance lost needs to be evaluated in
further experiments.
For general improvements of the HAR predic-
tion, there might be taken more features into account.
These might be adapted in an automated feature se-
lection procedure tailored for a specific set of HAR
activities. A good starting point for this, can be found
in the library Time Series Feature Extraction Library
(TSFEL) (Barandas et al., 2020) where the authors
provide a list of general purpose time series features.
For further improvements to the prediction perfor-
mance, the datasets might be uniformed to a bench-
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
972

mark set including other daily life activities, like in
(Leutheuser et al., 2013).
7 SUMMARY
This article presented a novel approach of evolving
Gaussian Mixture Models (GMMs) that are applied to
classification tasks, therefore called Classifier based
on GMM (CMM). We explained that GMM and their
particular variant of CMM are powerful tools that
have been shown to obtain very good results in many
domains and data sets. The current state of the art in
training them lies in the usage of k-means and expec-
tation maximisation, resulting in the most appropri-
ate shape of the Gaussians. However, this is charac-
terised by strong efforts in the training procedure. In
contrast, our approach aims at utilising the principles
of evolutionary computation. Hence, we presented
our methodology in detail, including the encoding
scheme, the definition of two novel genetic opera-
tors (i.e. mutation and recombination), and the result-
ing steps of the evolutionary process. Furthermore, a
baseline reference of random K-Means initialisation
is presented. In an experimental section, we demon-
strated the potential benefit of evolved GMMs/CMMs
using human activity recognition (HAR) as challeng-
ing use case. In considering various data sets of HAR,
we analysed the capability of evolved CMMs to pre-
dict the correct activities. In total, a balanced accu-
racy of above 80 % has been achieved, which is par-
ticularly comparable to other approaches of the state-
of-the-art while simultaneously allowing for novel ad-
vantages from the evolutionary process.
REFERENCES
Barandas, M., Folgado, D., Fernandes, L., Santos, S.,
Abreu, M., Bota, P., Liu, H., Schultz, T., and Gam-
boa, H. (2020). Tsfel: Time series feature extraction
library. SoftwareX, 11:100456.
Bishop, C. M. (2006). Pattern Recognition and Ma-
chine Learning (Information Science and Statistics).
Springer-Verlag.
Blanco, A., Delgado, M., and Pegalajar, M. C. (2001).
A real-coded genetic algorithm for training recurrent
neural networks. Neural networks, 14(1):93–105.
Chen, C., Wang, C., Hou, J., Qi, M., Dai, J., Zhang, Y.,
and Zhang, P. (2020). Improving accuracy of evolving
gmm under gpgpu-friendly block-evolutionary pat-
tern. International Journal of Pattern Recognition and
Artificial Intelligence, 34(03):2050006.
D’Angelo, M., Gerasimou, S., Ghahremani, S., Grohmann,
J., Nunes, I., Pournaras, E., and Tomforde, S. (2019).
On learning in collective self-adaptive systems: state
of practice and a 3d framework. In Proc. of 14th Int.
Symp. on Software Engineering for Adaptive and Self-
Managing Systems, pages 13–24.
del Alamo, C. M., Gil, F. C., Gomez, L. H., et al. (1996).
Discriminative training of gmm for speaker identifi-
cation. In 1996 IEEE International Conference on
Acoustics, Speech, and Signal Processing Conference
Proceedings, volume 1, pages 89–92. IEEE.
Deriche, M., Aliyu, S. O., and Mohandes, M. (2019). An
intelligent arabic sign language recognition system
using a pair of lmcs with gmm based classification.
IEEE Sensors Journal, 19(18):8067–8078.
Garcia-Gonzalez, D., Rivero, D., Fernandez-Blanco, E.,
and Luaces, M. R. (2020). A public domain dataset
for real-life human activity recognition using smart-
phone sensors. Sensors, 20(8):2200.
Goldberg, D. E. et al. (1990). Real-coded genetic algo-
rithms, virtual alphabets and blocking. Citeseer.
Gruhl, C., Sick, B., and Tomforde, S. (2021). Novelty de-
tection in continuously changing environments. Fu-
ture Generation Computer Systems, 114:138–154.
Heck, L. P. and Chou, K. C. (1994). Gaussian mixture
model classifiers for machine monitoring. In Proceed-
ings of ICASSP’94. IEEE International Conference on
Acoustics, Speech and Signal Processing, volume 6,
pages VI–133. IEEE.
Holland, J. (1975). Adaptation in natural and artificial sys-
tems, univ. of mich. press. Ann Arbor.
Huang, Y., Englehart, K., Hudgins, B., and Chan, A. (2005).
A gaussian mixture model based classification scheme
for myoelectric control of powered upper limb pros-
theses. IEEE Transactions on Biomedical Engineer-
ing, 52(11):1801–1811.
J
¨
anicke, M., Tomforde, S., and Sick, B. (2016). Towards
self-improving activity recognition systems based on
probabilistic, generative models. In 2016 IEEE
International Conference on Autonomic Computing
(ICAC), pages 285–291. IEEE.
Kephart, J. and Chess, D. (2003). The Vision of Autonomic
Computing. IEEE Computer, 36(1):41–50.
Kong, Y. and Fu, Y. (2018). Human action recog-
nition and prediction: A survey. arXiv preprint
arXiv:1806.11230.
Lau, S. L. and David, K. (2010). Movement recognition us-
ing the accelerometer in smartphones. In 2010 Future
Network & Mobile Summit, pages 1–9. IEEE.
Leutheuser, H., Schuldhaus, D., and Eskofier, B. M. (2013).
Hierarchical, multi-sensor based classification of daily
life activities: comparison with state-of-the-art al-
gorithms using a benchmark dataset. PloS one,
8(10):e75196.
Li, M. and Narayanan, S. (2011). Robust talking face video
verification using joint factor analysis and sparse rep-
resentation on gmm mean shifted supervectors. In
2011 IEEE International Conference on Acoustics,
Speech and Signal Processing (ICASSP), pages 1481–
1484. IEEE.
Martis, R. J., Chakraborty, C., and Ray, A. K. (2009). A
two-stage mechanism for registration and classifica-
Evolving Gaussian Mixture Models for Classification
973

tion of ecg using gaussian mixture model. Pattern
Recognition, 42(11):2979–2988.
McLachlan, G. J. and Rathnayake, S. (2014). On the num-
ber of components in a gaussian mixture model. Wiley
Interdisciplinary Reviews: Data Mining and Knowl-
edge Discovery, 4(5):341–355.
M
¨
uller-Schloer, C. and Tomforde, S. (2017). Organic
Computing-Technical Systems for Survival in the Real
World. Springer.
Ozerov, A., Lagrange, M., and Vincent, E. (2011). Gmm-
based classification from noisy features. In Interna-
tional Workshop on Machine Listening in Multisource
Environments (CHiME 2011).
Pinto, R. C. and Engel, P. M. (2015). A fast incremental
gaussian mixture model. PloS one, 10(10):e0139931.
Qi, P. and Wang, L. (2011). Experiments of gmm based
speaker identification. In 2011 8th International Con-
ference on Ubiquitous Robots and Ambient Intelli-
gence (URAI), pages 26–31. IEEE.
Reichhuber, S. and Tomforde, S. (2021). Bet-based evolu-
tionary algorithms: Self-improving dynamics in off-
spring generation. In ICAART (2), pages 1192–1199.
Scrucca, L. and Serafini, A. (2019). Projection pursuit
based on gaussian mixtures and evolutionary algo-
rithms. Journal of Computational and Graphical
Statistics, 28(4):847–860.
Velez, D. R., White, B. C., Motsinger, A. A., Bush, W. S.,
Ritchie, M. D., Williams, S. M., and Moore, J. H.
(2007). A balanced accuracy function for epistasis
modeling in imbalanced datasets using multifactor di-
mensionality reduction. Genetic Epidemiology: the
Official Publication of the International Genetic Epi-
demiology Society, 31(4):306–315.
You, C. H., Lee, K. A., and Li, H. (2010a). Gmm-svm ker-
nel with a bhattacharyya-based distance for speaker
recognition. IEEE Transactions on Audio, Speech,
and Language Processing, 18(6):1300–1312.
You, C. H., Li, H., and Lee, K. A. (2010b). A gmm-
supervector approach to language recognition with
adaptive relevance factor. In 2010 18th European Sig-
nal Processing Conference, pages 1993–1997. IEEE.
Zhao, X., Zhang, C., Yang, B., and Li, P. (2011). Adaptive
knot placement using a gmm-based continuous opti-
mization algorithm in b-spline curve approximation.
Computer-Aided Design, 43(6):598–604.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
974
